EERS: Energy-Efficient Reference Node Selection Algorithm for Synchronization in Industrial Wireless Sensor Networks



Abstract
:1. Introduction
2. Related Work
3. EERS Algorithm
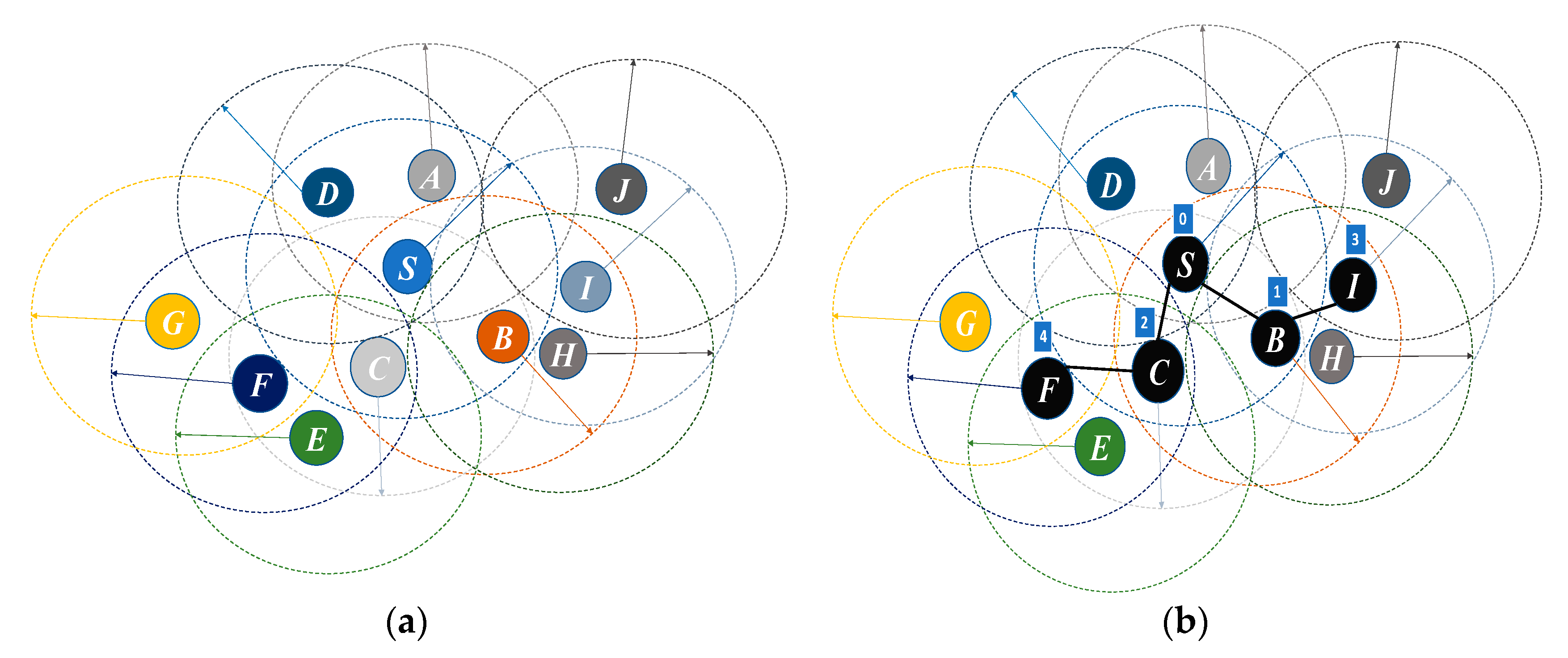
3.1. System Model
3.2. Operation of EERS
| Algorithm 1: EERS pseudo-code for reference node selection (sink node only) | |
| , | |
| 1. | |
| 2. | |
| 3. | |
| 4. | |
| 5. | |
| 6. | // is equal to the level of the farthest node from sink node |
| 7. | |
| 8. | |
| 9. | |
| 10. | |
| 11. | |
| 12. | |
| 13. | |
| 14. | // |
| 15. | |
| 16. | |
| 17. | |
| 18. | |
| 19. | |
| 20. | <> |
| Algorithm 2: EERS pseudo-code for reference scheduling selection (except sink node). | |
| 1. | ◼ Upon receiving |
| 2. | |
| 3. | |
| 4. | |
| 5. | |
| 6. | |
| 7. | |
| 8. | |
| 9. | |
| 10. | |
| 11. | |
| 12. | |
| 13. | Setup waiting timer |
| 14. | |
| 15. | ◼ Upon expires |
| 16. | <. > |
4. Experimental and Simulation Results
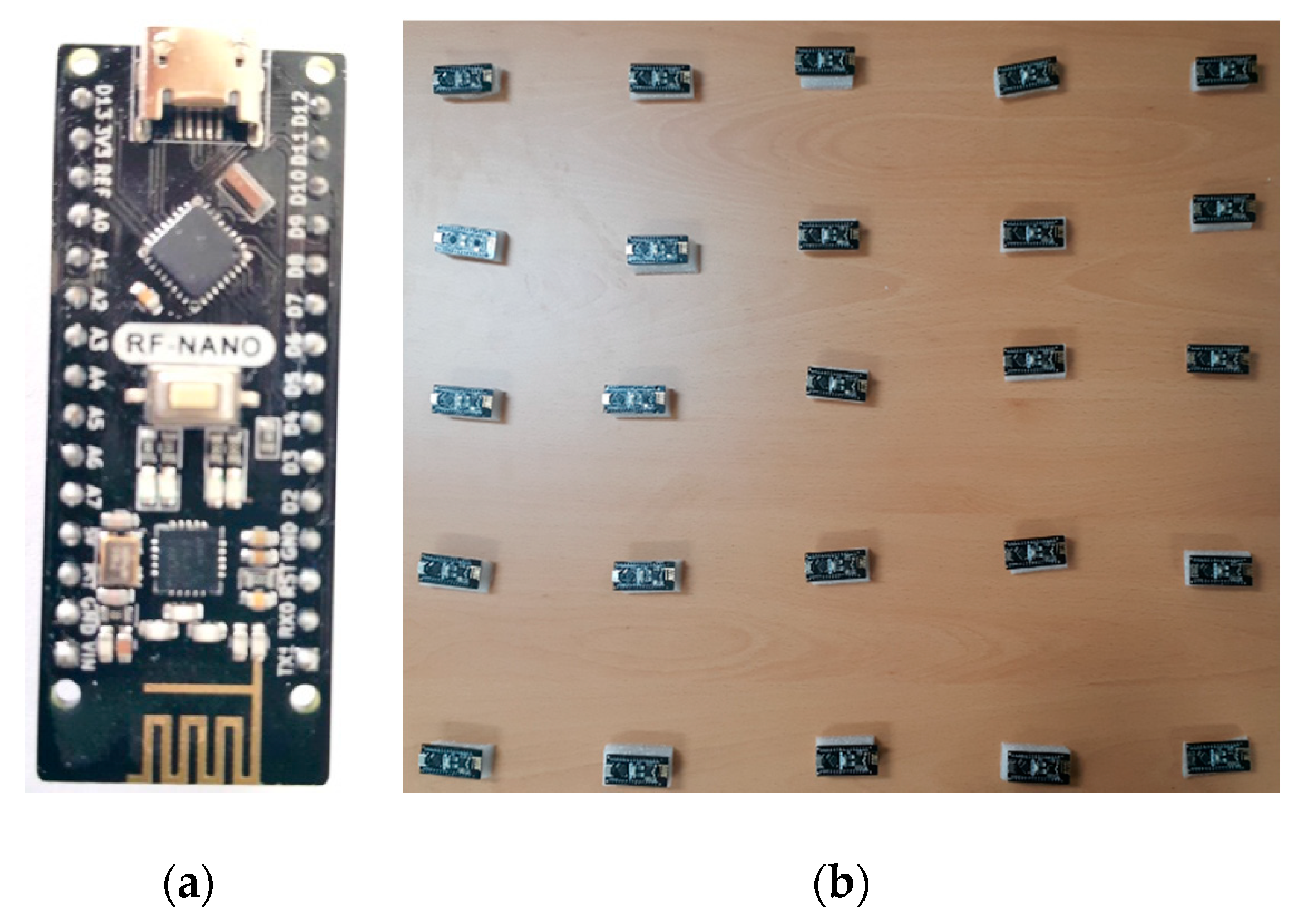
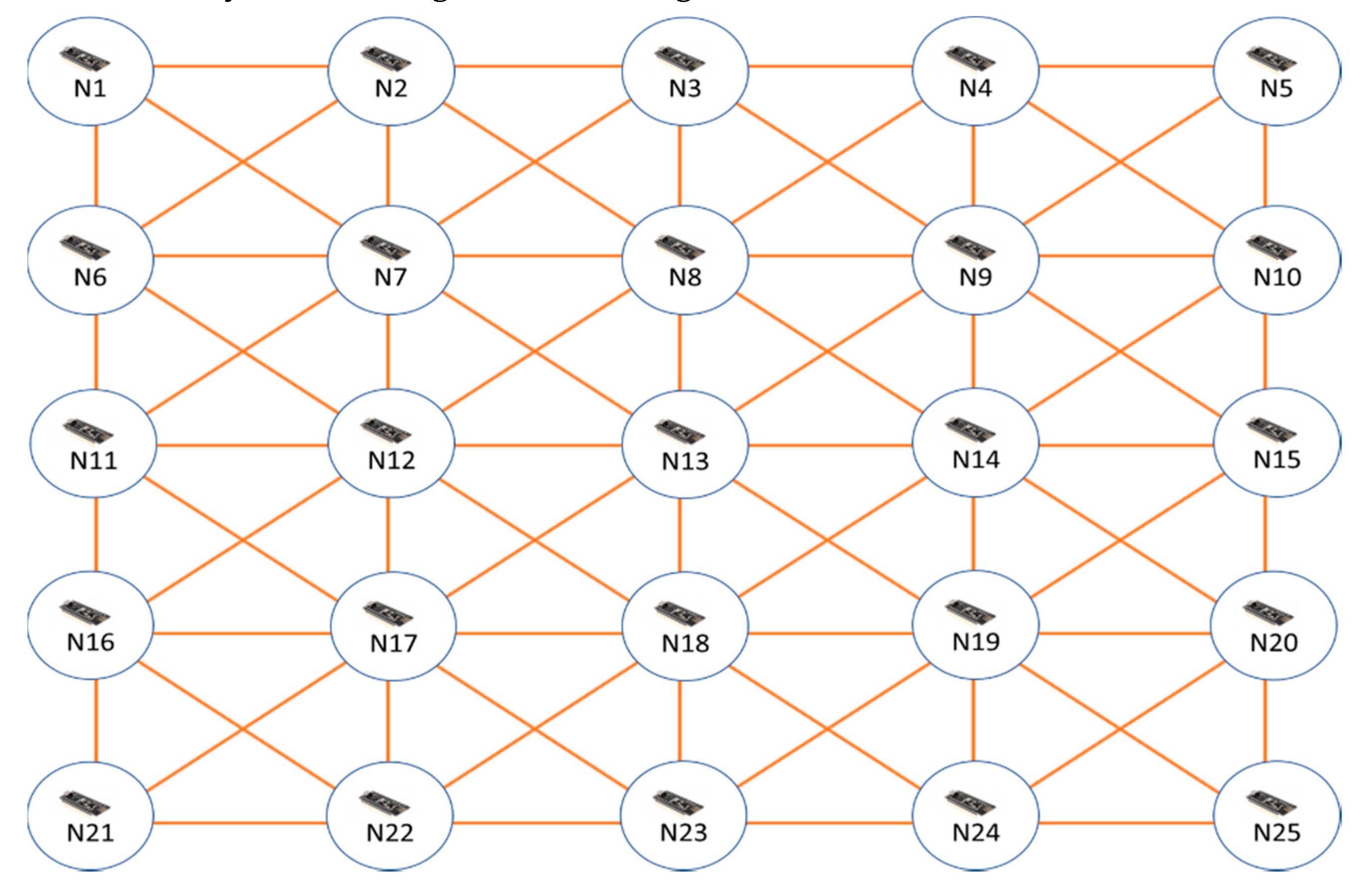
4.1. Experiments Setting
4.2. Experimental Results
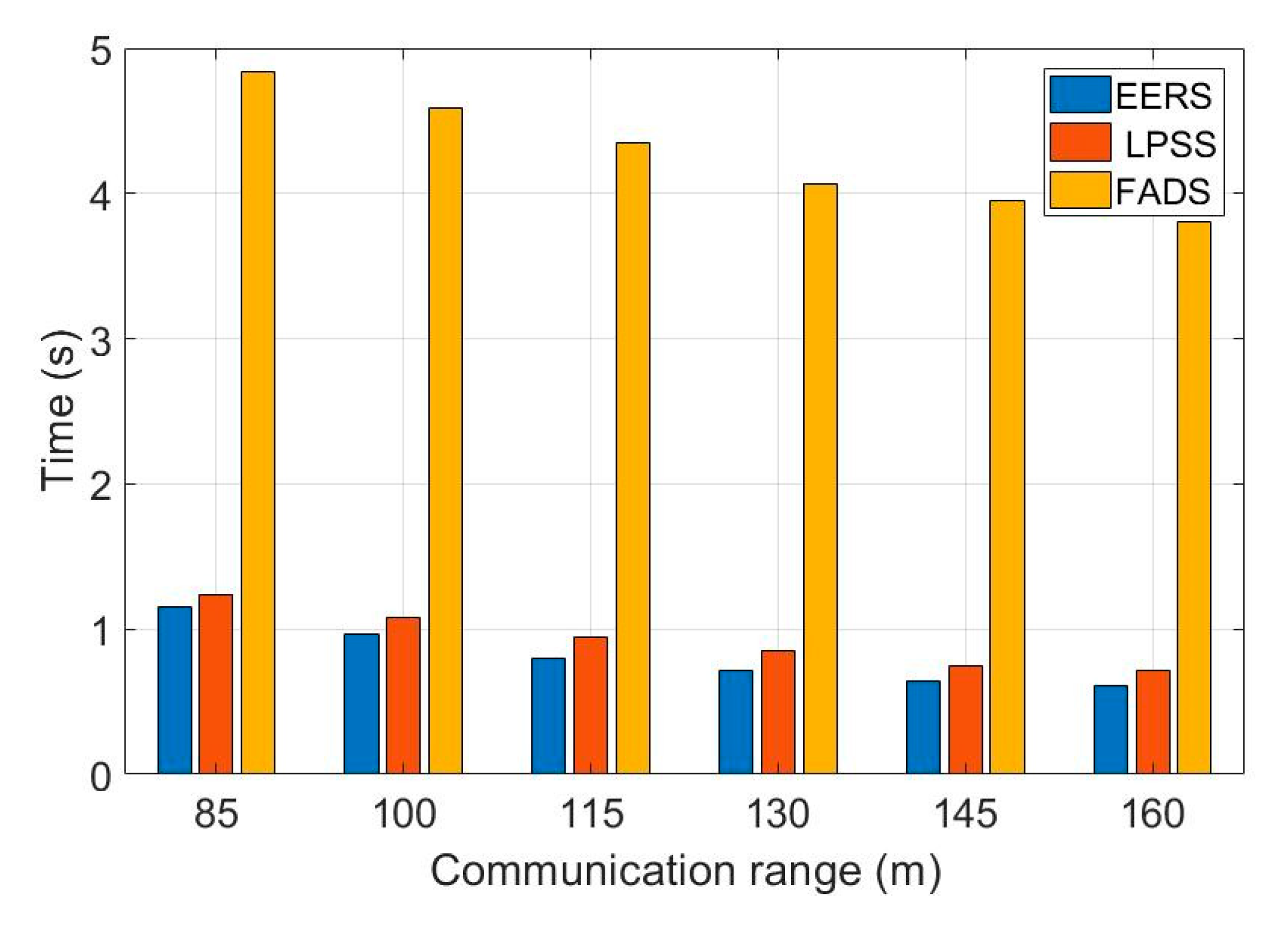
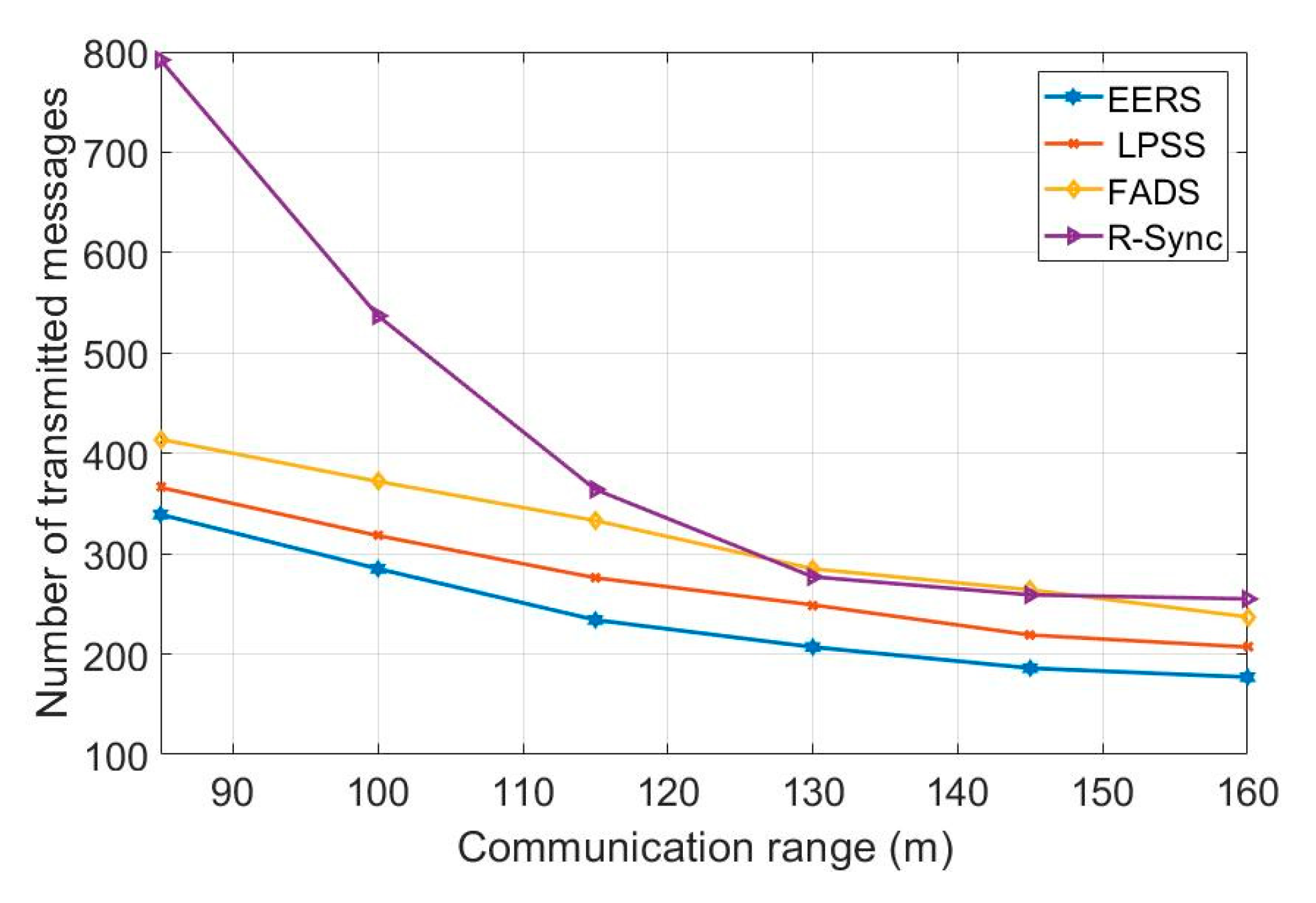
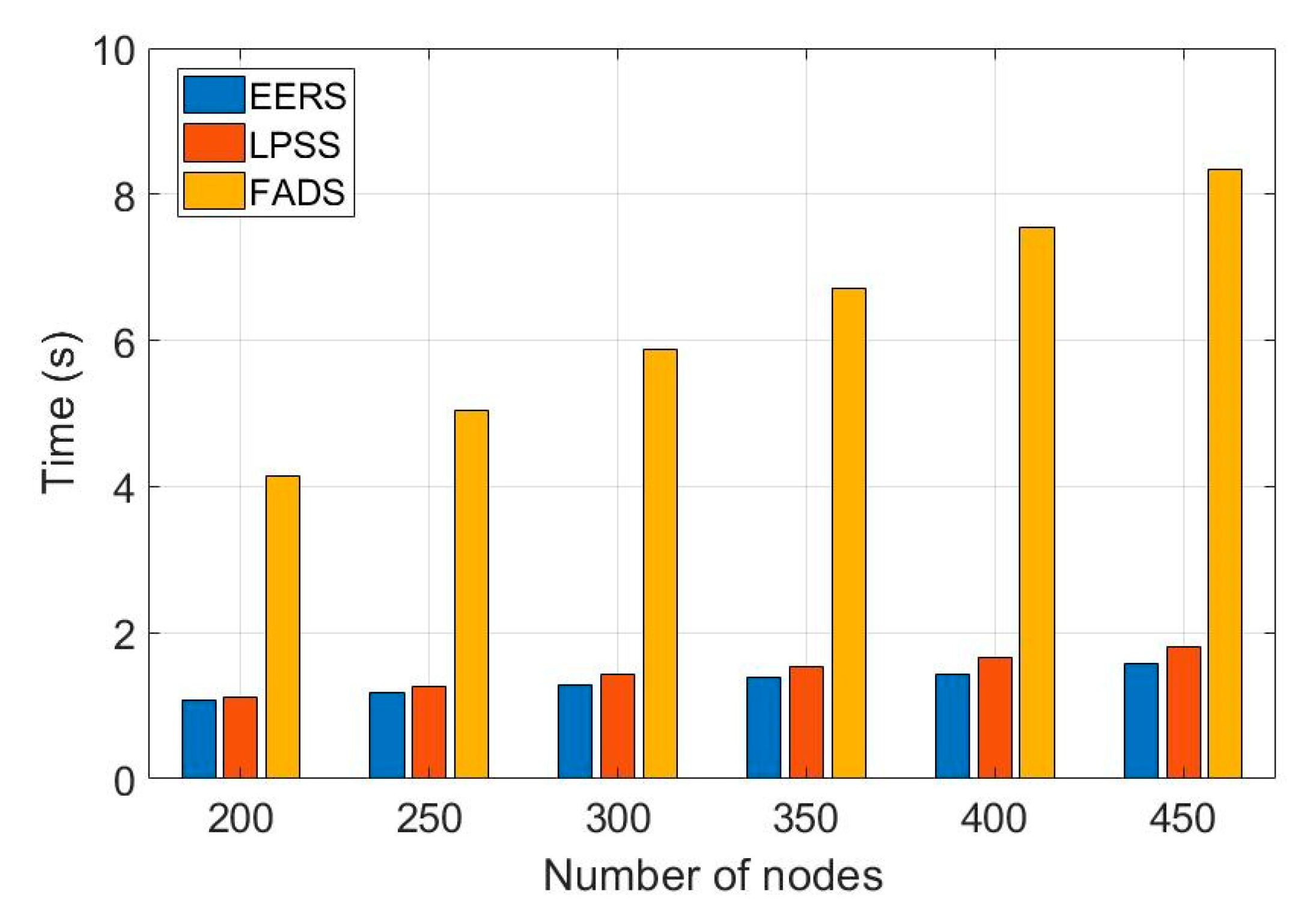
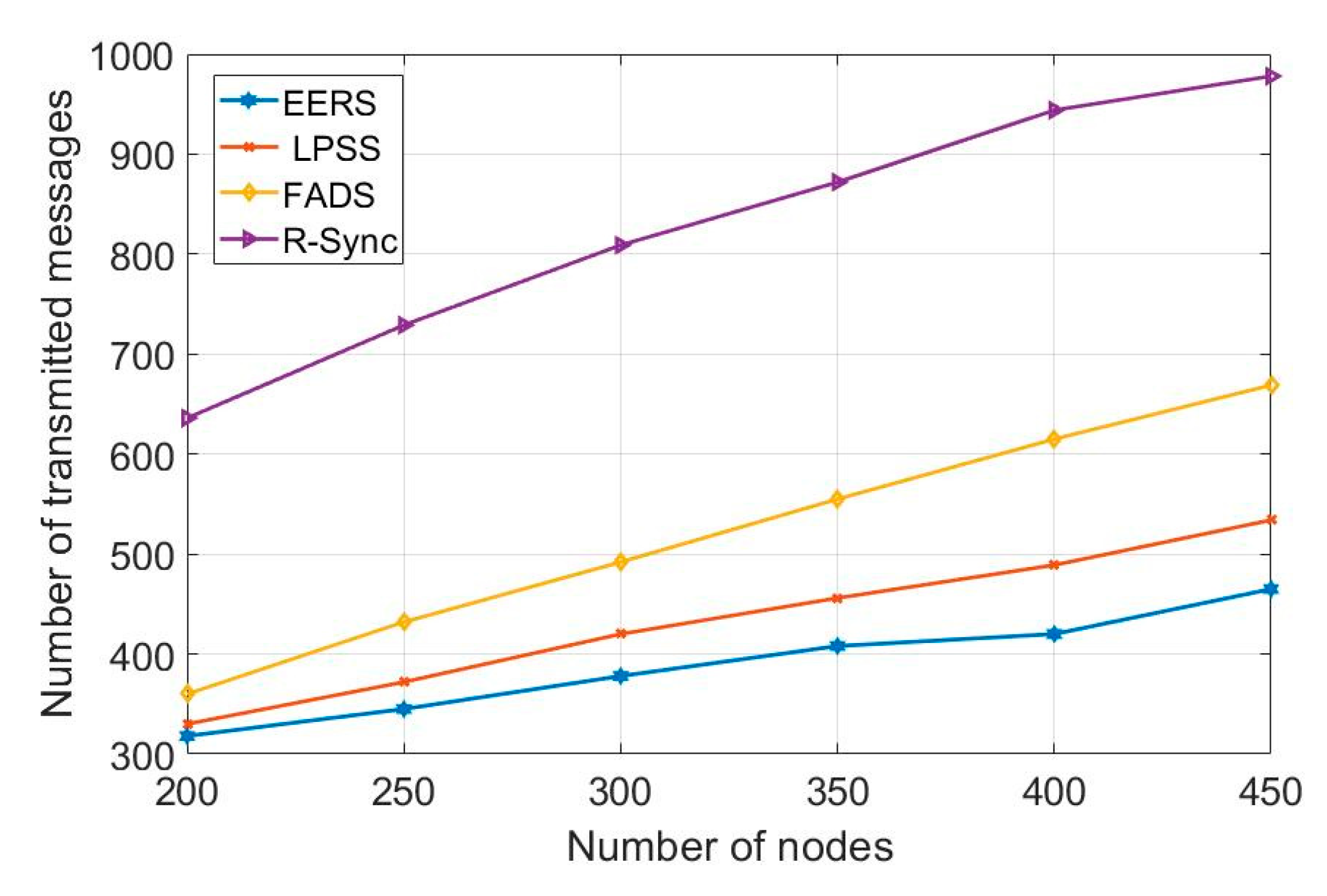
4.3. Large-Scale Simulation Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Park, P.; Ergen, S.C.; Fischione, C.; Lu, C.; Johansson, K.H. Wireless Network Design for Control Systems: A Survey. IEEE Commun. Surv. Tutor. 2018, 20, 978–1013. [Google Scholar] [CrossRef]
- Li, X.; Li, D.; Wan, J.; Vasilakos, A.V.; Lai, C.F.; Wang, S. A Review of Industrial Wireless Networks in the Context of Industry 4.0. Wirel. Netw. 2017, 23, 23–41. [Google Scholar] [CrossRef]
- Gungor, V.C.; Hancke, G.P. Industrial Wireless Sensor Networks: Challenges, Design Principles, and Technical Approaches. IEEE Trans. Ind. Electron. 2009, 56, 4258–4265. [Google Scholar] [CrossRef] [Green Version]
- Lisiecki, D.; Zhang, P.; Theel, O. CONE: A Connected Dominating Set-Based Flooding Protocol for Wireless Sensor Networks. Sensors 2019, 19, 2378. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Elsharief, M.; Abd El-Gawad, M.A.; Kim, H. Density Table-Based Synchronization for Multi-Hop Wireless Sensor Networks. IEEE Access 2018, 6, 1940–1953. [Google Scholar] [CrossRef]
- Qiu, T.; Zhang, Y.; Qiao, D.; Zhang, X.; Wymore, M.L.; Sangaiah, A.K. A Robust Time Synchronization Scheme for Industrial Internet of Things. IEEE Trans. Ind. Inform. 2018, 14, 3570–3580. [Google Scholar] [CrossRef]
- Sarvghadi, M.A.; Wan, T.C. Message Passing Based Time Synchronization in Wireless Sensor Networks: A Survey. Int. J. Distrib. Sens. Netw. 2016, 5, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Yıldırım, K.S. Gradient Descent Algorithm Inspired Adaptive Time Synchronization in Wireless Sensor Networks. IEEE Sens. J. 2016, 16, 5463–5470. [Google Scholar] [CrossRef] [Green Version]
- Silva, F.A. Industrial Wireless Sensor Networks: Applications, Protocols, and Standards [Book News]. IEEE Ind. Electron. Mag. 2014, 8, 67–68. [Google Scholar] [CrossRef]
- Elsharief, M.; Abd El-Gawad, M.A.; Kim, H. Low-Power Scheduling for Time Synchronization Protocols in A Wireless Sensor Networks. IEEE Sens. Lett. 2019, 3, 1–4. [Google Scholar] [CrossRef]
- Dai, H.; Han, R. TSync: A Lightweight Bidirectional Time Synchronization Service for Wireless Sensor Networks. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2004, 8, 125–139. [Google Scholar] [CrossRef]
- Maróti, M.; Kusy, B.; Simon, G.; Lédeczi, Á. The Flooding Time Synchronization Protocol. In Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems, SenSys ’04, Baltimore, MD, USA, 3–5 November 2004; pp. 39–49. [Google Scholar]
- Elson, J.; Girod, L.; Estrin, D. Fine-Grained Network Time Synchronization Using Reference Broadcasts. ACM SIGOPS Oper. Syst. Rev. 2003, 36, 147–163. [Google Scholar] [CrossRef]
- Ganeriwal, S.; Kumar, R.; Srivastava, M.B. Timing-Sync Protocol for Sensor Networks. In Proceedings of the 1st International Conference on Embedded Networked Sensor Systems; Association for Computing Machinery: New York, NY, USA, 2003. [Google Scholar]
- Huan, X.; Kim, K.S.; Lee, S.; Lim, E.G.; Marshall, A. A Beaconless Asymmetric Energy-Efficient Time Synchronization Scheme for Resource-Constrained Multi-Hop Wireless Sensor Networks. IEEE Trans. Commun. 2020, 68, 1716–1730. [Google Scholar] [CrossRef] [Green Version]
- Shi, F.; Tuo, X.; Yang, S.X.; Lu, J.; Li, H. Rapid-Flooding Time Synchronization for Large-Scale Wireless Sensor Networks. IEEE Trans. Ind. Inform. 2020, 16, 1581–1590. [Google Scholar] [CrossRef]
- Elsts, A.; Fafoutis, X.; Duquennoy, S.; Oikonomou, G.; Piechocki, R.; Craddock, I. Temperature-Resilient Time Synchronization for the Internet of Things. IEEE Trans. Ind. Inform. 2018, 14, 2241–2250. [Google Scholar] [CrossRef] [Green Version]
- Elsharief, M.; Abd El-Gawad, M.A.; Kim, H. FADS: Fast Scheduling and Accurate Drift Compensation for Time Synchronization of Wireless Sensor Networks. IEEE Access 2018, 6, 65507–65520. [Google Scholar] [CrossRef]
- Gong, F.; Sichitiu, M.L. CESP: A Low-Power High-Accuracy Time Synchronization Protocol. IEEE Trans. Veh. Technol. 2016, 65, 2387–2396. [Google Scholar] [CrossRef]
- Noh, K.L.; Serpedin, E.; Qaraqe, K. A New Approach for Time Synchronization in Wireless Sensor Networks: Pairwise Broadcast Synchronization. IEEE Trans. Wirel. Commun. 2008, 7, 3318–3322. [Google Scholar]
- Noh, K.L.; Chaudhari, Q.M.; Serpedin, E.; Suter, B.W. Novel Clock Phase Offset and Skew Estimation Using Two-Way Timing Message Exchanges for Wireless Sensor Networks. IEEE Trans. Commun. 2007, 55, 766–777. [Google Scholar] [CrossRef]
- Noh, K.L.; Wu, Y.C.; Qaraqe, K.; Suter, B.W. Extension of Pairwise Broadcast Clock Synchronization for Multicluster Sensor Networks. EURASIP J. Adv. Signal. Process. 2007, 2008, 286168. [Google Scholar] [CrossRef] [Green Version]
- Qiu, T.; Chi, L.; Guo, W.; Zhang, Y. STETS: A Novel Energy-Efficient Time Synchronization Scheme Based on Embedded Networking Devices. Microprocess. Microsyst. 2015, 39, 1285–1295. [Google Scholar] [CrossRef]
- Yıldırım, K.S.; Gürcan, Ö. Efficient Time Synchronization in a Wireless Sensor Network by Adaptive Value Tracking. IEEE Trans. Wirel. Commun. 2014, 13, 3650–3664. [Google Scholar] [CrossRef] [Green Version]
- Yildirim, K.S.; Kantarci, A. Time Synchronization Based on Slow-Flooding in Wireless Sensor Networks. IEEE Trans. Parallel Distrib. Syst. 2014, 25, 244–253. [Google Scholar] [CrossRef]
- Kim, D.; Wu, Y.; Li, Y.; Zou, F.; Du, D.Z. Constructing Minimum Connected Dominating Sets with Bounded Diameters in Wireless Networks. IEEE Trans. Parallel Distrib. Syst. 2009, 20, 147–157. [Google Scholar]
- Cormen, T.H.; Leiserson, C.E.; Rivest, R.L.; Stein, C. Introduction to Algorithms; MIT Press: Cambridge, MA, USA, 2009. [Google Scholar]
- IEEE Standard for Low-Rate Wireless Networks. IEEE Std 802.15.4-2015 (Revision of IEEE Std 802.15.4-2011). Available online: https://ieeexplore.ieee.org/document/7460875 (accessed on 11 April 2020).
- Arduino Nano User Manual. Available online: https://www.arduino.cc/en/uploads/Main/ArduinoNanoManual23.pdf (accessed on 1 June 2020).
- ATmega328P [DATASHEET]. Available online: http://ww1.microchip.com/downloads/en/DeviceDoc/Atmel-7810-Automotive-Microcontrollers-ATmega328P_Datasheet.pdf (accessed on 1 June 2020).
- nRF24L01+ Preliminary Product Specification. Available online: https://www.sparkfun.com/datasheets/Components/SMD/nRF24L01Pluss_Preliminary_Product_Specification_v1_0.pdf (accessed on 1 June 2020).
- Li, Z.; Chen, Q.; Koltun, V. Combinatorial Optimization with Graph Convolutional Networks and Guided Tree Search. arXiv 2018, arXiv:1810.10659. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Carrier frequency | 2.4 GHz |
| Memory | 2 KB RAM, 32 KB Flash |
| Bit rate | 250 Kbps |
| Transmission power | 33.9 mw |
| Reception power | 36.9 mw |
| Modulation type | GFSK |
| TX power | 0 dBm |
| Frame size | 49 Bytes |
| Scheduled time slot | 10 ms |
| Crystal oscillator frequency | 16 MHz |
| Protocol | EERS | LPSS | FADS | R-Sync | |
|---|---|---|---|---|---|
| Operation | |||||
| Scheduling process (message) | 11 | 17 | 25 | - | |
| Time of scheduling process (second) | 1.1 | 1.7 | 46 | - | |
| Synchronization process (message) | 27 | 45 | 27 | 51 | |
| Parameter | Value |
|---|---|
| Network area | 1000 m 1000 m |
| Networks size (N) | 200, 250, 300, 350, 400 and 450 nodes |
| Nodes distribution | uniformly distribution |
| Node wireless range radius (r) | 85, 100, 115, 130, 145, and 160 m |
| Scheduling time width | 10ms |
| Sink node position | Center (500 m, 500 m), Corner (0,0) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elsharief, M.; El-Gawad, M.A.A.; Ko, H.; Pack, S. EERS: Energy-Efficient Reference Node Selection Algorithm for Synchronization in Industrial Wireless Sensor Networks. Sensors 2020, 20, 4095. https://doi.org/10.3390/s20154095
Elsharief M, El-Gawad MAA, Ko H, Pack S. EERS: Energy-Efficient Reference Node Selection Algorithm for Synchronization in Industrial Wireless Sensor Networks. Sensors. 2020; 20(15):4095. https://doi.org/10.3390/s20154095
Chicago/Turabian StyleElsharief, Mahmoud, Mohamed A. Abd El-Gawad, Haneul Ko, and Sangheon Pack. 2020. "EERS: Energy-Efficient Reference Node Selection Algorithm for Synchronization in Industrial Wireless Sensor Networks" Sensors 20, no. 15: 4095. https://doi.org/10.3390/s20154095
APA StyleElsharief, M., El-Gawad, M. A. A., Ko, H., & Pack, S. (2020). EERS: Energy-Efficient Reference Node Selection Algorithm for Synchronization in Industrial Wireless Sensor Networks. Sensors, 20(15), 4095. https://doi.org/10.3390/s20154095