A Low-Cost On-Street Parking Management System Based on Bluetooth Beacons †


Abstract
:1. Introduction
- (1)
- The cost of our on-street parking management system is a lot more inexpensive than existing systems relying on either wireless magnetometers or image recognition-based smart parking meters.
- (2)
- Compared with magnetometer-based approaches that only detect the occupancy of the parking spaces, our approach can detect the occupancy and acquire the identity of vehicles using the parking spaces at the same time.
- (3)
- Compared with image recognition-based approaches that may fail under poor illumination conditions or obstruction of license plates, our approach can correctly detect the identity of vehicles using the parking spaces through Bluetooth radio frequency signals.
- (4)
- We identify some limitations of our Bluetooth beacon-based approach and propose possible solutions to cope with them.
2. Related Work
2.1. Review on Smart Parking Systems
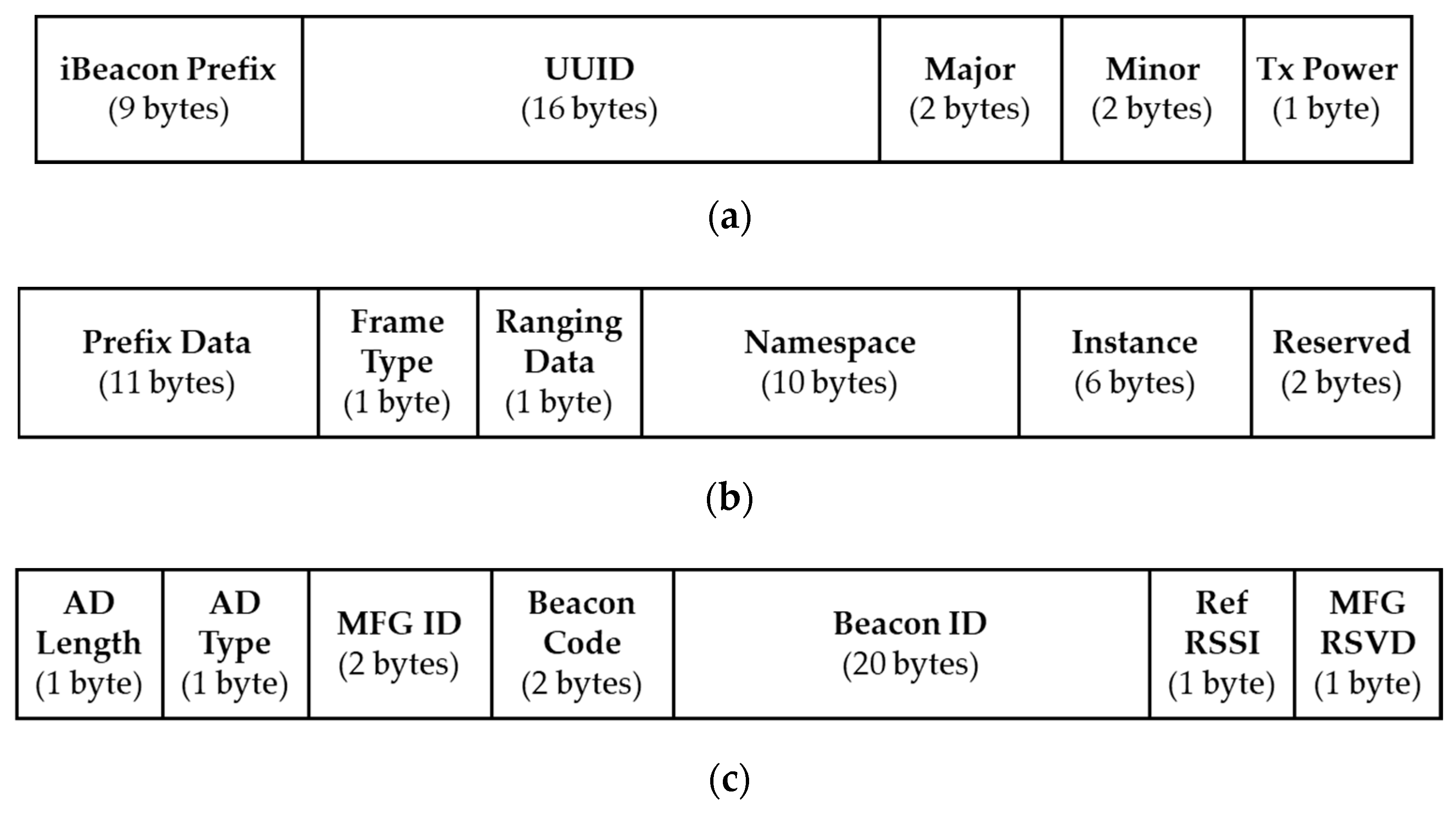
2.2. Overview of Bluetooth Beacon Technology
3. The Proposed Parking Management System
3.1. System Architecture
- (1)
- Beacon transmitter: Drivers eligible to use the smart on-street parking service are required to register their vehicles in order to get a registered beacon transmitter. We assume that the beacon transmitter is attached to the right-side mirror of the vehicle (for right-hand traffic countries), which is closer to the curb when the vehicle is parked. The beacon transmitter broadcasts beacon packets regularly, which then can be detected by the beacon readers. The source Bluetooth MAC address of the beacon packets from a specific vehicle is fixed, therefore the beacon readers are able to distinguish the owners (i.e., vehicles) of the received beacon packets.
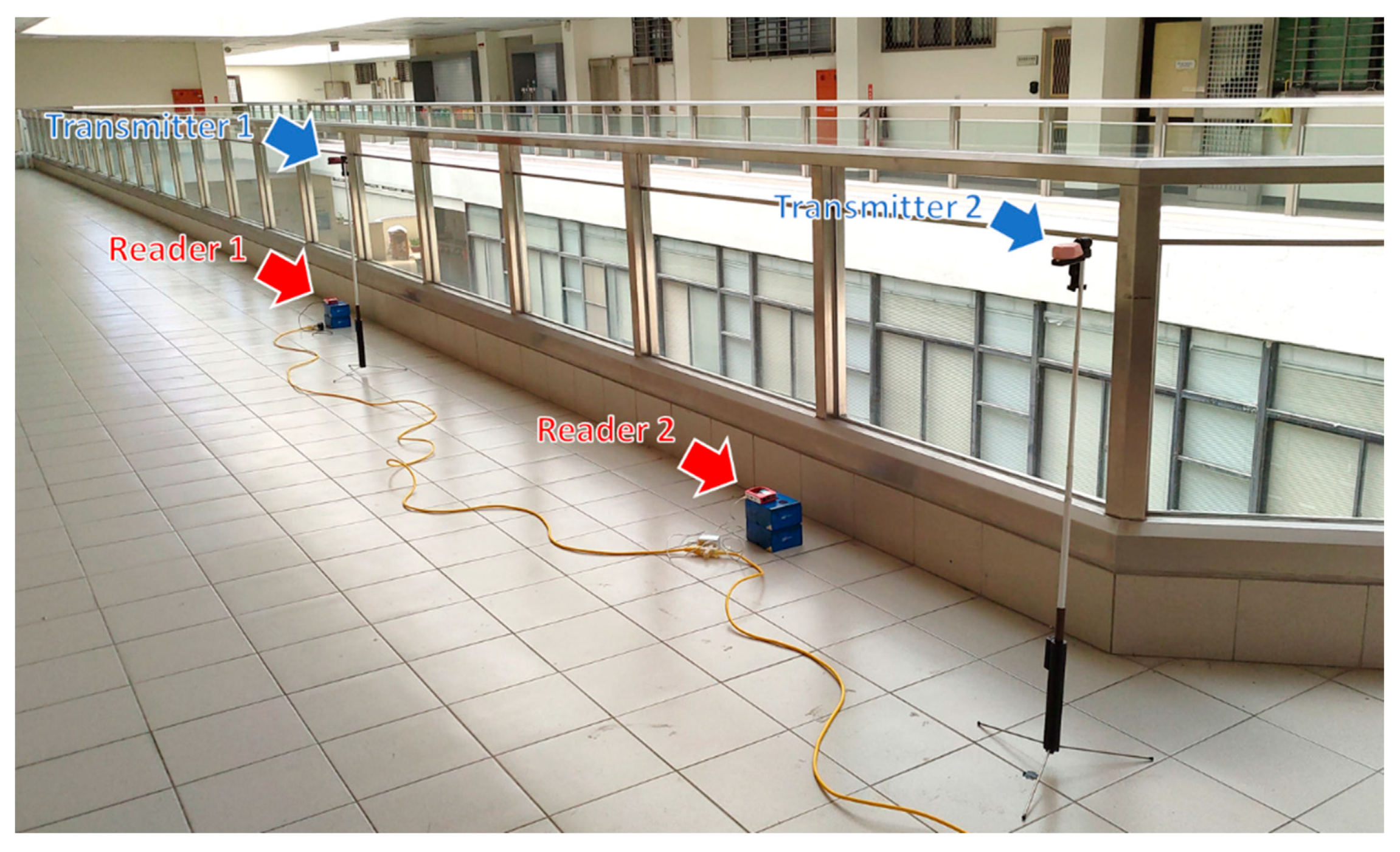
- (2)
- Beacon reader: As shown in Figure 2, beacon readers are deployed at the corners of the parking spaces along the curb. Readers periodically scan for beacon packets with the service-specific UUID from the registered beacon transmitters. Once the UUID is matched, the reader will process the packet’s RSSI using Kalman filter and then generate a distance estimation. Finally, the reader publishes the following data to the gateway: the detected Bluetooth MAC address, the estimated distance, and the time of detection.
- (3)
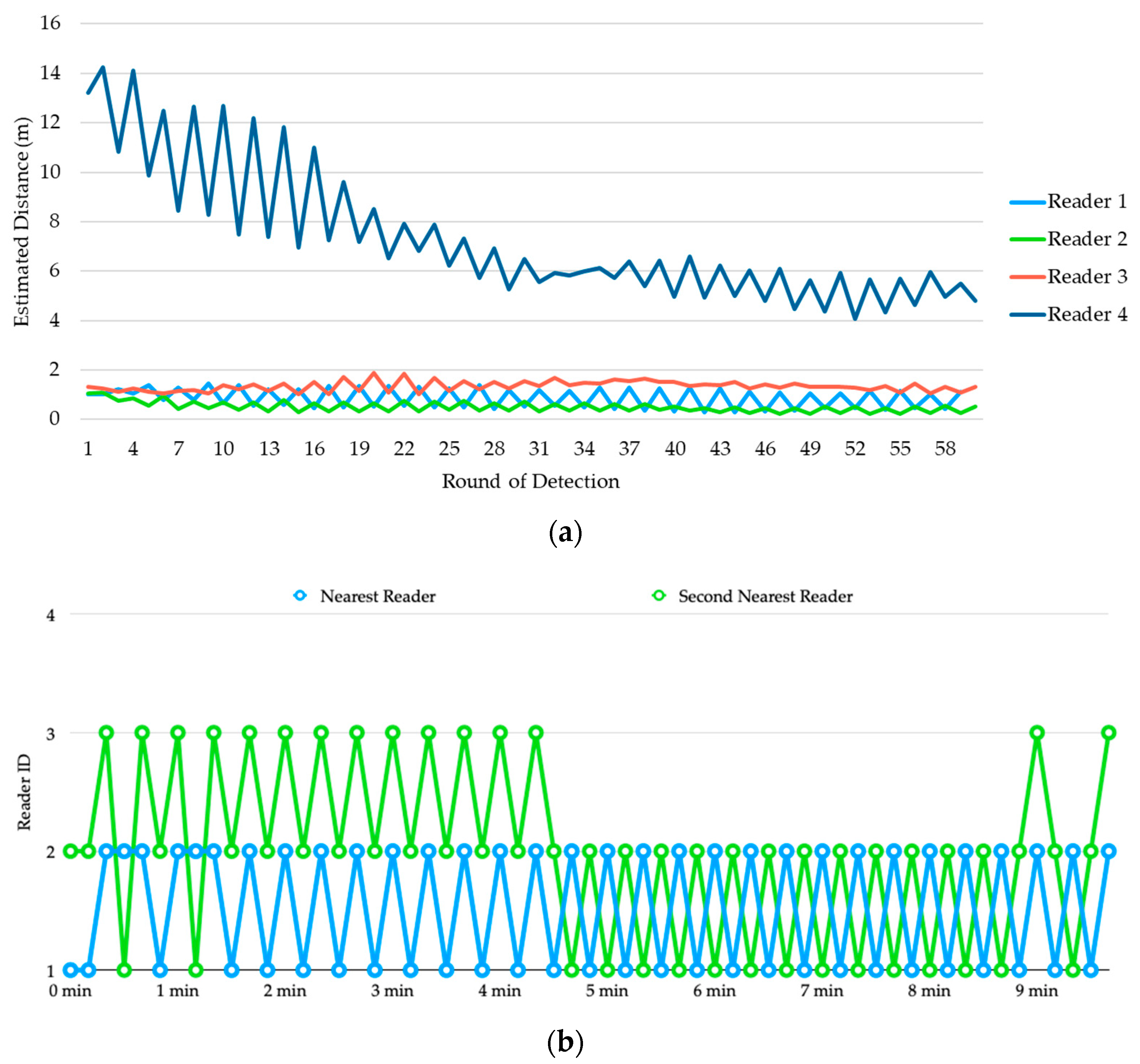
- Gateway: The main functionality of the gateway is to determine the occupancy state of each parking space based on the data provided by the beacon readers. Specifically, by comparing the estimated distances of the same beacon transmitter measured at various readers, the gateway is able to infer that the vehicle has been parked at a specific parking space. Then, the gateway sends the findings to the database in the remote parking server.
- 4)
- Parking server: The parking server is responsible for storing the occupancy state of all the on-street parking spaces along with the identity of the vehicles using the parking spaces. The administrator can log on to the system and then query the database to view the real-time occupancy information as well as the parking history records. With the information, the management system would be able to generate electronic parking bills for the drivers. On the other hand, the parking server can also be used by the drivers to view their own parking records.
3.2. Formation of the Parking Sensor Network
- (1)
- Establish a link-layer connection between the 6LBR and each 6LN.
- (2)
- Establish a Logical Link Control and Adaptation Protocol (L2CAP) channel on top of the link-layer connection.
- (3)
- Configure IPv6 global address for the Bluetooth interfaces.
3.3. Principle of Operations
4. Preliminary Results and Experiments
4.1. Parking Management System
4.2. Experiments
4.2.1. Experiment 1
4.2.2. Experiment 2
4.2.3. Experiment 3
4.3. Discussions
- Errors in distance estimation
- Detection of vehicles without beacon transmitters
- Detection of a vehicle occupying two or more parking spaces
- Misdetection of a passing-by vehicle as occupying a parking space
- Comparison of existing infrastructure-based on-street parking systems
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Shoup, D. The High. Cost of Free Parking; American Planning Association: Chicago, IL, USA, 2005. [Google Scholar]
- GSMA. Smart Parking: A Guide to Ensuring A Successful Mobile IoT Deployment; GSMA: London, UK, 2017. [Google Scholar]
- Sfpark Pilot Program. Available online: https://www.sfmta.com/projects/sfpark-pilot-program (accessed on 28 May 2020).
- Paystay. Available online: https://www.paystay.com.au/ (accessed on 28 May 2020).
- On-Street Parking Data. Available online: https://www.melbourne.vic.gov.au/about-council/governance-transparency/open-data/Pages/on-street-parking-data.aspx (accessed on 28 May 2020).
- On Street Parking—Smart Parking Meter. Available online: http://www.acerits.net/index-en.html#works (accessed on 11 June 2020).
- ParkinglotApp. Available online: https://parkinglotapp.com/ (accessed on 11 June 2020).
- Chen, H.-T.; Lin, P.-Y.; Lin, C.-Y. A Smart Roadside Parking System Using Bluetooth Low Energy Beacons. In Proceedings of the Workshops of the 33rd International Conference on Advanced Information Networking and Applications (AINA-2019), Matsue, Japan, 27–29 March 2019; pp. 471–480. [Google Scholar]
- Zhang, Z.; Li, X.; Yuan, H.; Yu, F. A street parking system using wireless sensor networks. Int. J. Distrib. Sens. Netw. 2013, 9, 1–10. [Google Scholar] [CrossRef]
- Barone, R.E.; Giuffre, T.; Siniscalchi, S.M.; Morgano, M.A.; Tesoriere, G. Architecture for parking management in smart cities. IET Intell. Transp. Syst. 2014, 8, 445–452. [Google Scholar] [CrossRef]
- Mathur, S.; Jin, T.; Kasturirangan, N.; Chandrasekaran, J.; Xue, W.; Gruteser, M.; Trappe, W. Parknet: Drive-by Sensing of Road-Side Parking Statistics. In Proceedings of the 8th International Conference on Mobile Systems, Applications, and Services, San Francisco, CA, USA, 15–18 June 2010; pp. 123–136. [Google Scholar]
- Roman, C.; Liao, R.; Ball, P.; Ou, S.; Heaver, M.d. Detecting on-street parking spaces in smart cities: Performance evaluation of fixed and mobile sensing systems. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2234–2245. [Google Scholar] [CrossRef] [Green Version]
- Arab, M.; Nadeem, T. Magnopark—Locating On-Street Parking Spaces Using Magnetometer-Based Pedestrians’ Smartphones. In Proceedings of the 14th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), San Diego, CA, USA, 12–14 June 2017; pp. 1–9. [Google Scholar]
- Banti, K.; Louta, M.; Karetsos, G. Parkcar: A Smart Roadside Parking Application Exploiting the Mobile Crowdsensing Paradigm. In Proceedings of the 8th International Conference on Information, Intelligence, Systems and Applications (IISA), Larnaca, Cyprus, 27–30 August 2017; pp. 1–6. [Google Scholar]
- Shi, F.; Wu, D.; Arkhipov, D.I.; Liu, Q.; Regan, A.C.; McCann, J.A. Parkcrowd: Reliable Crowdsensing for Aggregation and Dissemination of Parking Space Information. IEEE Trans. Intell. Transp. Syst. 2019, 20, 4032–4044. [Google Scholar] [CrossRef]
- Seymer, P.; Wijesekera, D.; Kan, C. Secure Outdoor Smart Parking Using Dual Mode Bluetooth Mesh Networks. In Proceedings of the IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019; pp. 1–7. [Google Scholar]
- Seymer, P.; Wijesekera, D.; Kan, C.-D. Smart Parking Zones Using Dual Mode Routed Bluetooth Fogged Meshes. In Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS), Heraklion, Crete, Greece, 3–5 May 2019; pp. 211–222. [Google Scholar]
- Mackey, A.; Spachos, P.; Plataniotis, K.N. Smart parking system based on bluetooth low energy beacons with particle filtering. IEEE Syst. J. 2020, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Bluetooth Core Specification Version 4.1. Available online: https://www.bluetooth.com/specifications/archived-specifications/ (accessed on 13 August 2020).
- Ibeacon. Available online: https://developer.apple.com/ibeacon/ (accessed on 19 June 2020).
- Eddystone. Available online: https://developers.google.com/beacons/eddystone (accessed on 19 June 2020).
- Altbeacon. Available online: https://altbeacon.org/ (accessed on 19 June 2020).
- Getting Started with iBeacon. Available online: https://developer.apple.com/ibeacon/Getting-Started-with-iBeacon.pdf (accessed on 19 June 2020).
- Nieminen, J.; Savolainen, T.; Isomaki, M.; Patil, B.; Shelby, Z.; Gomez, C. Ipv6 Over Bluetooth(r) Low Energy. Available online: https://tools.ietf.org/html/rfc7668 (accessed on 23 June 2020).
- Lam, C.H.; She, J. In Distance Estimation on Moving Object Using BLE Beacon. In Proceedings of the International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Barcelona, Spain, 21–23 October 2019; pp. 1–6. [Google Scholar]
- Röbesaat, J.; Zhang, P.; Abdelaal, M.; Theel, O. An improved ble indoor localization with kalman-based fusion: An experimental study. Sensors 2017, 17, 951. [Google Scholar] [CrossRef] [PubMed]
- Zhou, C.; Yuan, J.; Liu, H.; Qiu, J. Bluetooth indoor positioning based on rssi and kalman filter. Wirel. Pers. Commun. 2017, 96, 4115–4130. [Google Scholar] [CrossRef]
- Altbeacon Android Beacon Library. Available online: https://github.com/AltBeacon/android-beacon-library (accessed on 24 June 2020).
- Oasis Message Queuing Telemetry Transport (MQTT) TC. Available online: https://www.oasis-open.org/committees/tc_home.php?wg_abbrev=mqtt (accessed on 24 June 2020).
- Proximity and RSSI. Available online: https://www.bluetooth.com/blog/proximity-and-rssi/ (accessed on 29 June 2020).
- Gomez, C.; Darroudi, S.; Savolainen, T.; Spoerk, M. Ipv6 Mesh Over Bluetooth(r) Low Energy Using IPSP (draft-ietf-6lo-blemesh-07). Available online: https://www.ietf.org/id/draft-ietf-6lo-blemesh-07.txt (accessed on 30 June 2020).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reader ID | MAC Address of the Transmitter | Estimated Distance (m) | Time of Detection |
|---|---|---|---|
| 1 | 11:22:33:44:55:66 | 7.45 | 2020-06-25 15:13:10 |
| 2 | 11:22:33:44:55:66 | 1.36 | 2020-06-25 15:13:08 |
| 3 | 11:22:33:44:55:66 | 4.03 | 2020-06-25 15:13:12 |
| 4 | 11:22:33:44:55:66 | 10.28 | 2020-06-25 15:13:11 |
| Item | Specification |
|---|---|
| Beacon transmitter | Estimote location beacon (Bluetooth 5.0) |
| Beacon reader | Raspberry Pi 3 Model B+ |
| Gateway | Raspberry Pi 3 Model B |
| Parking server | Desktop PC with Windows 10 |
| Magnetometer-Based Systems | Smart Parking Meters-Based Systems | Mackey et al.’s Beacon-Based System | Our System | |
|---|---|---|---|---|
| Automatic detection of parking space occupancy? | Yes | Yes | No | Yes |
| Automatic detection of vehicle ID? | No | Yes | No | Yes |
| Number of roadside devices | N | N | N | N + 1 |
| Total cost of deployment of roadside devices (USD) | 100 × N | 2000 × N | 5 × N | 10 × (N + 1) |
| Human labor required? | Yes (parking attendants) | No | Yes (both drivers and parking attendants) | No |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chien, C.-F.; Chen, H.-T.; Lin, C.-Y. A Low-Cost On-Street Parking Management System Based on Bluetooth Beacons. Sensors 2020, 20, 4559. https://doi.org/10.3390/s20164559
Chien C-F, Chen H-T, Lin C-Y. A Low-Cost On-Street Parking Management System Based on Bluetooth Beacons. Sensors. 2020; 20(16):4559. https://doi.org/10.3390/s20164559
Chicago/Turabian StyleChien, Chi-Fang, Hui-Tzu Chen, and Chi-Yi Lin. 2020. "A Low-Cost On-Street Parking Management System Based on Bluetooth Beacons" Sensors 20, no. 16: 4559. https://doi.org/10.3390/s20164559
APA StyleChien, C.-F., Chen, H.-T., & Lin, C.-Y. (2020). A Low-Cost On-Street Parking Management System Based on Bluetooth Beacons. Sensors, 20(16), 4559. https://doi.org/10.3390/s20164559