1. Introduction
Motion capture is a fundamental component of many modern biomechanical analyses. Common technologies used for human motion capture include optical, image/video processing and electromagnetic-based systems [
1]. Although considered the gold standard of motion capture, optical motion capture (OMC) systems are expensive, typically limited to a laboratory environment, and suffer from marker occlusion, often resulting in loss of data [
2]. Image/video processing systems suffer from similar marker occlusion problems, as well as parallax and perspective error [
3]. Electromagnetic systems are limited to slow movements due to a low sampling frequency and are susceptible to large errors where ferromagnetic disturbances are present in the environment [
1]. The limitations of current motion capture technology, particularly for field-based research, have prompted researchers to explore alternate technology for human motion capture.
Advancements in inertial measurement unit (IMU) and magnetic, angular rate and gravity (MARG) technologies has seen the development of affordable, compact, and powerful devices [
4]. Inertial measurement units measure the tri-axial angular rate and linear acceleration, while MARG devices also measure the tri-axial magnetic field strength. By attaching IMU/MARG devices to individual body segments and performing specialized processing of the output data, the position and orientation of each segment and the resultant kinematics of the body can be estimated [
5]. High sampling rates, an affordable equipment cost, and the ability to stream data live or collect data directly on the device for future download make IMU/MARG technology an attractive alternative to traditional motion capture systems. Researchers have used both proprietary and researcher-developed IMU/MARG systems to measure human movement for a range of applications, including sporting [
6,
7,
8,
9,
10,
11], clinical [
12,
13,
14,
15], and ergonomic [
16,
17,
18,
19] applications. Literature investigating the validity of IMU/MARG motion capture for the assessment of human kinematics suggests that the accuracy of IMU/MARG motion capture is dependent on the task complexity, movement speed, sensor placement, specific kinematic parameter being analysed, and processing methodology used [
20,
21]. Processing methods described in previous validation studies of researcher-developed systems, particularly in the areas of sensor fusion and sensor to segment alignment, provide valuable information for the development of IMU/MARG motion capture technology.
In its most simplistic form, integration of the angular rate data of an IMU/MARG device provides an orientation estimation of the device with respect to its original orientation in a local coordinate frame [
22]. Integration of the inherent bias within the angular rate data results in cumulative drift error over time [
23]. The acceleration due to gravity measured by the accelerometer may be used to assist in correcting the attitude (inclination) component of this drift; however, the signal becomes corrupt when the device is in a non-quasi-static state [
22]. Similarly, the magnetometer data provides a heading (horizontal direction) orientation and can be used to assist in correcting the heading component of the drift. However, this heading estimation is often corrupted by magnetic disturbances within the environment [
23].
Sensor fusion leverages the most reliable components of accelerometer, gyroscope, and magnetometer orientation observations at each time point to provide an orientation estimation of the device in a local or global reference frame [
24]. While proprietary systems use their own sensor fusion algorithms, the most common methods of sensor fusion incorporate versions of the complementary filter [
12,
25,
26] and Kalman filter [
27]. Previous literature suggests minimal differences in the orientation estimation accuracy between such sensor fusion methods [
22,
28,
29]. The ability to further tune the Kalman filter using various noise and disturbance parameters is suggested to give Kalman filter-based approaches a slight accuracy advantage over complementary filter approaches, albeit at the expense of the computational load [
22].
Once the orientation of the IMU/MARG device has been established, the coordinate system of the device must be aligned with the coordinate system of the segment to which it is attached. This process is known as sensor to segment alignment. Sensor to segment alignment methods described in previous validation studies of researcher-developed systems can be categorized as manual alignment with or without the use of specialized alignment devices [
7,
30]; static pose estimation [
13,
31]; functional calibration [
32,
33,
34,
35]; and most recently, deep learning [
36]. Although the former three alignment methods have been shown to have a minimal effect on the overall agreement between OMC and IMU/MARG measures [
37], the practicality of such sensor to segment alignment methods should be considered.
The manual alignment method (also commonly referred to as the technical anatomical alignment method) requires the precise alignment of the local coordinate system of the IMU/MARG device with the anatomical coordinate system of each segment. The manual alignment method is the least computationally expensive method [
37]; however, it comes at the cost of requiring additional specialized calibration equipment or highly skilled persons to identify anatomical landmarks and place sensors according to these landmarks [
7,
30].
Static pose calibration methods remove some of the reliance on the precise alignment of each IMU/MARG device coordinate system with the respective segment coordinate system by allowing the arbitrary placement of all but one device [
13,
31]. Mathematical transformations are used to transform a known local sensor coordinate system into a known segment coordinate system via a global coordinate system. This method appears to be a common compromise between computationally simplistic manual alignment and more computationally expensive approaches.
Functional calibration techniques require the client to perform specific movements with the IMU/MARG devices arbitrarily positioned on each segment [
32,
33,
34,
35]. Numerical methods are then used to determine the segment or joint coordinate systems from the data collected during the calibration movements. While the functional calibration method allows the arbitrary positioning of all IMU/MARG devices, the computational cost in establishing segment/joint coordinate systems is generally greater than the manual alignment and static pose method [
37]. Additionally, certain conditions may prevent some clients from performing the calibration movements [
33].
Most recently, deep learning has been used to achieve sensor to segment alignment [
36]. This state-of-the-art approach relies on a quantity of previously collected real or simulation motion data to train a model to identify the orientation of an arbitrarily positioned sensor and automatically align it with the segment coordinate system. Although this method is relatively new and has seen limited development, initial research suggests that the method may be computationally expensive and that it requires large sets of existing data for accurate model training [
36].
As there is currently no standardized methodology for IMU/MARG motion capture for all applications, it is necessary to learn from the previous literature and validate any novel or application-specific IMU/MARG motion capture methodology. To the best of the authors’ knowledge, no previous literature has validated the use of MARG-based motion capture during functional fitness exercises [
20,
38], where highly dynamic movements result in large ranges of motion across multiple joints [
39].
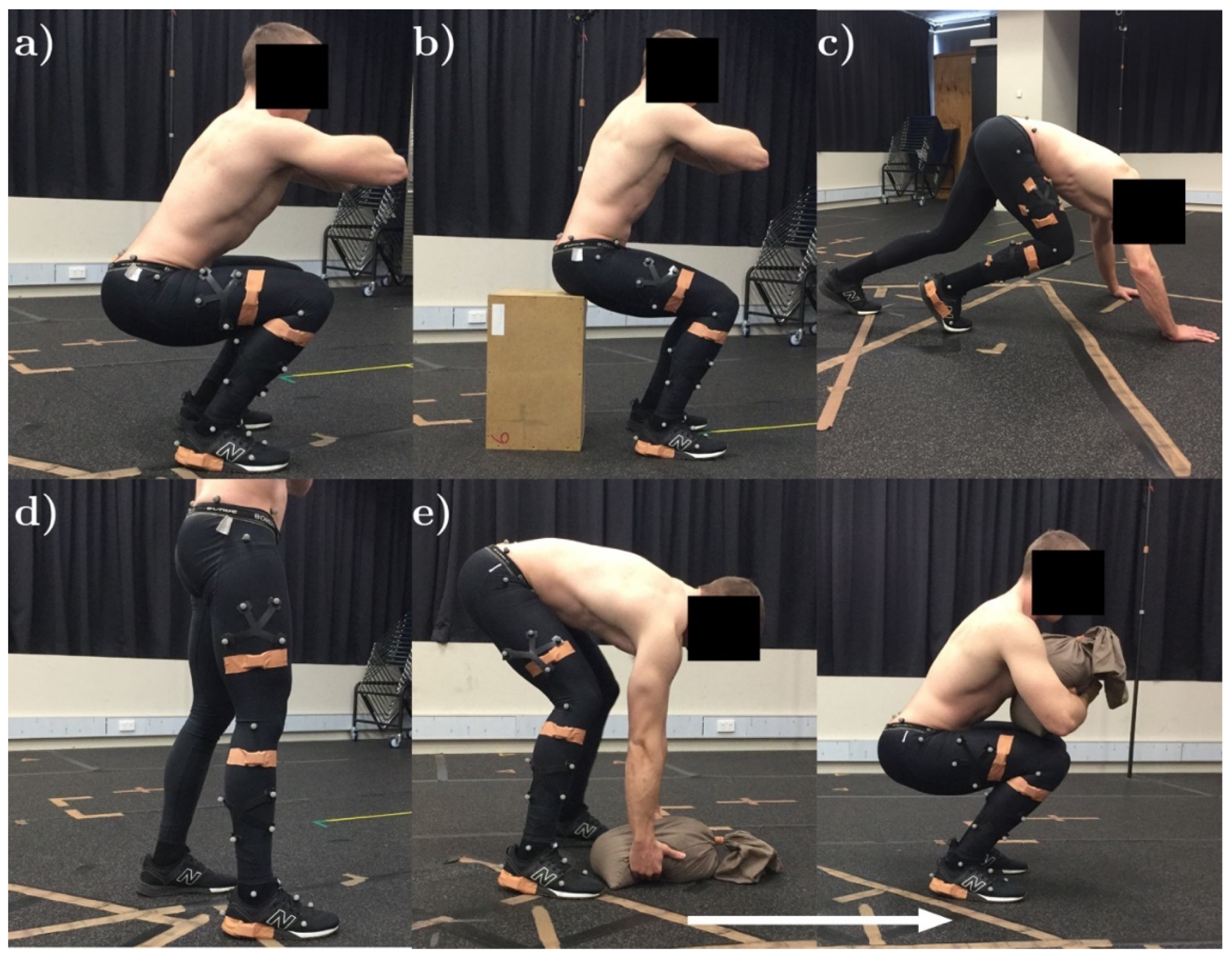
The aim of this study was to assess the validity of a minimal modeling MARG motion capture methodology (from here on referred to as the MARG method) for the estimation of spatiotemporal (stride length, stride time, and stance time) and kinematic (sagittal plane hip, knee, and ankle joint range of motion (ROM)) parameters when compared to those obtained using an OMC system during various functional fitness exercises. The MARG method uses a minimal modeling approach, which includes the alignment of the sensor to the segment, processing, and anatomical modeling assumptions.
4. Discussion
The aim of this study was to assess the validity of a minimal modeling MARG motion capture method for spatiotemporal and kinematic measures during repetitions of various functional fitness exercises. The MARG method used minimal modeling assumptions, in that simple, sensor to segment alignment, data processing (through the DEF method), and anatomical modeling assumptions were used. To the best of the authors’ knowledge, the exercises selected in the current study covered a wider range of sagittal plane ROM than previous literature [
5,
20,
38,
52].
The RMSE in hip, knee, and ankle ROM during the squat, box squat, and sandbag pickup were similar to those of previous research during squat, single leg squat, and counter movement jump exercises (hip: 4.9–8.3°; knee: 2.4–3.1°; ankle: 2.5–5.3°) [
38]. While the knee ROM RMSE may be slightly greater in the current study than those of Teufl, Miezal, Taetz, Fröhlich, and Bleser [
38], a MAPE of less than 10% was still considered to be a good level of agreement. Slightly greater agreeance was seen in joint ROM using the TAF method than the DEF method for the hip and knee; however, both methods were acceptable. The DEF method showed greater agreeance in all analysed exercises for ankle ROM and is suggested in preference to the TAF method for ankle joint measures.
The shuffle-walk and bear crawl demonstrated small hip and knee joint ROM (12.1° ± 3.3–40.0° ± 20.4°) and agreement between the OMC system and both TAF and DEF MARG methods varied. Similar hip and knee RMSE during over-ground walking (hip: 6.1°, knee: 6.8°) have been found in previous studies [
53]. The relatively large (>10%) MAPE found during the shuffle-walk and bear crawl movements in the current study suggest neither MARG method (DEF or TAF) may be acceptable for measuring the relatively moderate hip or knee ROM during the shuffle-walk or bear crawl. The high noise to ROM measurements observed in hip and knee ROM during the modified gait patterns (example seen in
Figure 7d) made the manual alignment of OMC and MARG time-series plots based on peak values ambiguous. Furthermore, phase discrepancies were observed in these data (
Figure 7a,b), which may be the result of the resampling of MARG joint angle estimations to 100 Hz for comparison with OMC. In exercises such as the shuffle walk where the stride duration is small (0.846 ± 0.219 s) relative to the sample rate of the OMC system (100 Hz), the modeling of few data points may result in the loss of fidelity in the joint angle approximation. As the MARG method is initially sampled and modeled at 1125 Hz, and then resampled to 100 Hz for comparison with the OMC, the loss of fidelity in the joint angle approximation may be less than the OMC approximation. The large differences observed in the timeseries curve analysis (in particular
Figure 7e) may be a combined result of the inherent noise in the MARG method joint angle approximation and the loss of fidelity in the OMC joint angle approximation for short-duration activities, such as a stride in the shuffle walk and bear crawl. The ambiguity caused by both noise and phase duration discrepancy led to the inability to confidently report E
10% values for the hip and knee and as such, such data were omitted. It was concluded that the recommendation based on other error metric calculations, that neither MARG method (DEF or TAF) may be acceptable for measuring hip/knee ROM during the shuffle-walk or bear crawl, would not change upon the calculation of E
10% for all participants.
Preliminary ankle ROM data of the shuffle-walk and bear crawl demonstrated an even greater noise to ROM ratio (
Figure 7e,f) than at the hip and knee. Ambiguity caused by this large noise to ROM ratio lead to the inability to confidently report error metrics. Wells, Alderson, Camomilla, Donnelly, Elliott, and Cereatti [
7] observed greater differences in OMC- and MARG-based joint angle estimations during higher velocity upper-limb sporting movements when compared to lower velocity movements. As the MARG devices used to measure ankle ROM are positioned closer to the extremity of the lower limb than those used to estimate hip and knee ROM, higher velocities and larger disagreement between the OMC and MARG joint angle estimation than at the hip and knee may be expected. Based on the preliminary data, error metrics of the hip and knee, and predicted greater error metrics at the ankle, it was concluded that neither MARG method may be suitable for ankle ROM assessment during the shuffle-walk and bear crawl where a small ROM and greater movement velocity are expected.
Whilst previous literature has focused on comparing OMC relative angles of markers placed on or around MARG sensors to relative angles estimated from MARG, the current study compared biomechanically-modeled joint estimations derived from an OMC system to relative angles estimated from MARG measures. The relative angles measured using the MARG method assume that the anterior/posterior axis of the foot sensor and the anterior/posterior axes of all limbs are aligned during the calibration pose. Any error in the initial alignment will be apparent in the mathematical transformation of each individual segment sensor coordinate system to the respective segment coordinate system, with the error compounding where adjoining segments are misaligned. Brice et al. [
54] demonstrated less agreement between OMC biomechanically-modeled joint angles and un-modeled MARG relative angles than OMC un-modeled relative angles and MARG measured relative angles. This leads to the suggestion that some of the differences in joint angle ROM estimations found in the current study may be due to the differences in modeling assumptions used in each of the OMC and MARG methods and the compounding error occurring throughout the alignment and mathematical transformation process.
With the exception of the stride length, the errors in spatiotemporal measures during the shuffle-walk and bear crawl in the current study were greater than those observed using a similar methodology during over-ground walking [
55]. The stride length, stride time, and stance time RMSE observed by Teufl, Lorenz, Miezal, Taetz, Fröhlich, and Bleser [
55] during over-ground walking were 0.04 m, 0.01 s, and 0.02 s, respectively, with similar RMSE having been observed in treadmill running [
56]. The larger disagreement in temporal parameters between the OMC and MARG method in the current study may partially be due to the difficulty in identifying the instance of IC and FC during the modified gait patterns, which resulted in reduced IC and reduced changes in heel acceleration during the initial swing than would be seen in a normal gait with longer strides [
57]. In the modified gait patterns, identifying FC from a MARG sensor mounted on the lateral side of the heel, where the toe is the last true contact point with the ground, may lead to inaccuracies in identifying the FC instance.
While this study addressed a number of gaps within the literature, a number of limitations of the current study should be noted. Data were only collected from a single side of the body, in a limited laboratory space and assessed only for sagittal plane flexion/extension ROM. Although a magnetic calibration was conducted for each testing session, it is expected that due to ferromagnetic disturbances present in the laboratory environment, the accuracy of the MARG method may have still been compromised. The reference OMC and MARG method use different physical measurements to derive joint angle estimations, with each method having associated noise. Measurement noise combined with different modeling assumptions would result in distinctly different noise properties and therefore signal patterns. The ability to compare estimations of small ROM between systems where the noise to signal ratio is high may be a major limitation when validating MARG against OMC methods [
20,
38].











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}