Salinity Independent Flow Measurement of Vertical Upward Gas-Liquid Flows in a Small Pipe Using Conductance Method


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Conductivity Detection Method
3. The Strategy of Using Combined Sensors
4. Experimental Evaluation
5. Results and Discussion
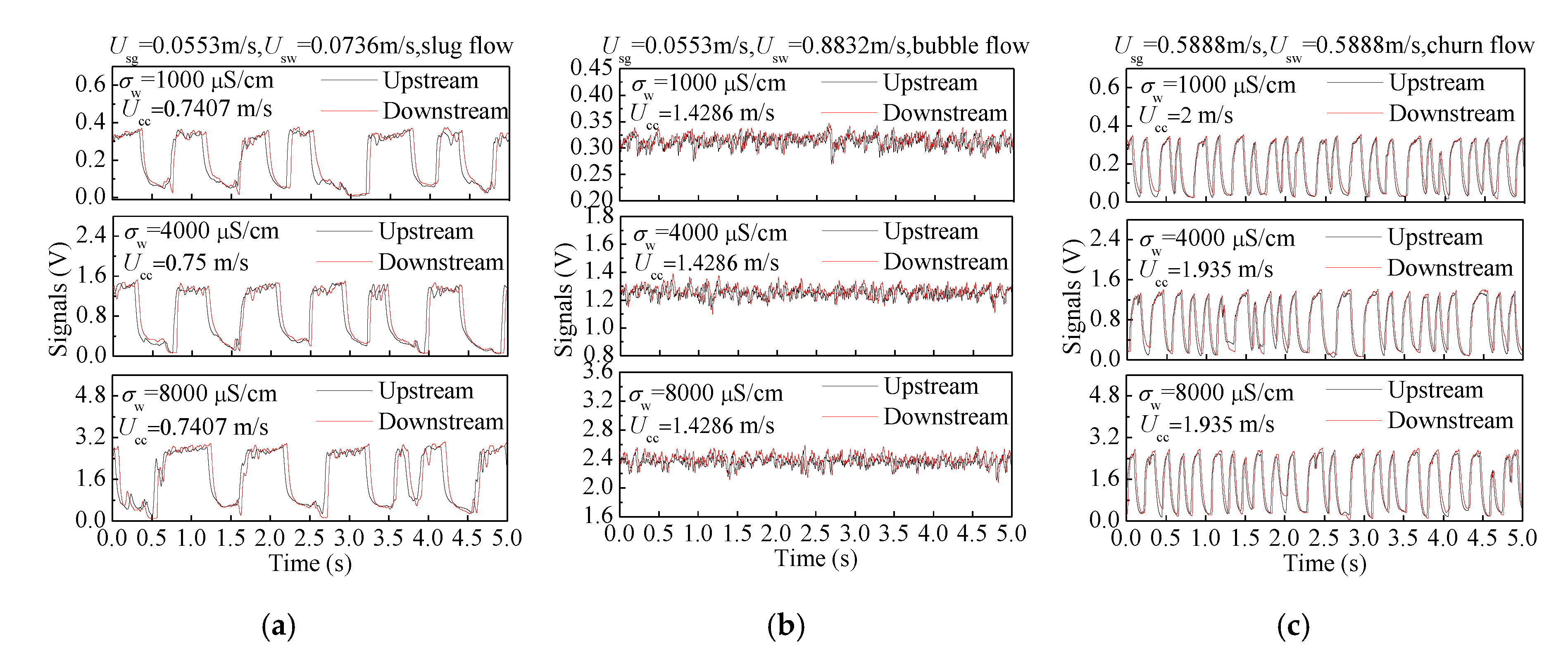
5.1. Salinity Independent Fluctuation Signals of Water Holdup
5.2. New Water Holdup Measurement Model
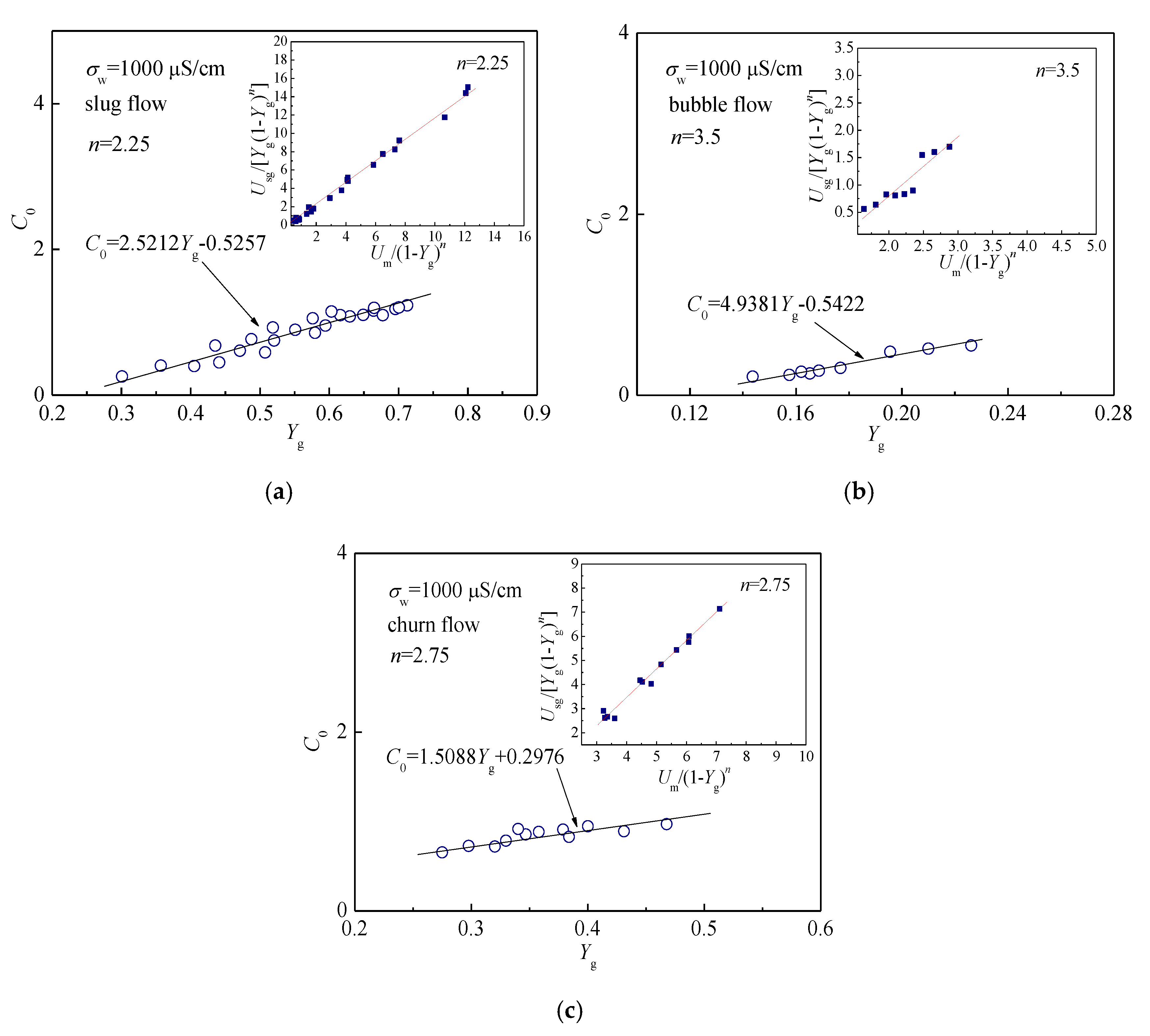
5.3. Salinity Independent Flow Velocity Measurement
6. Conclusions
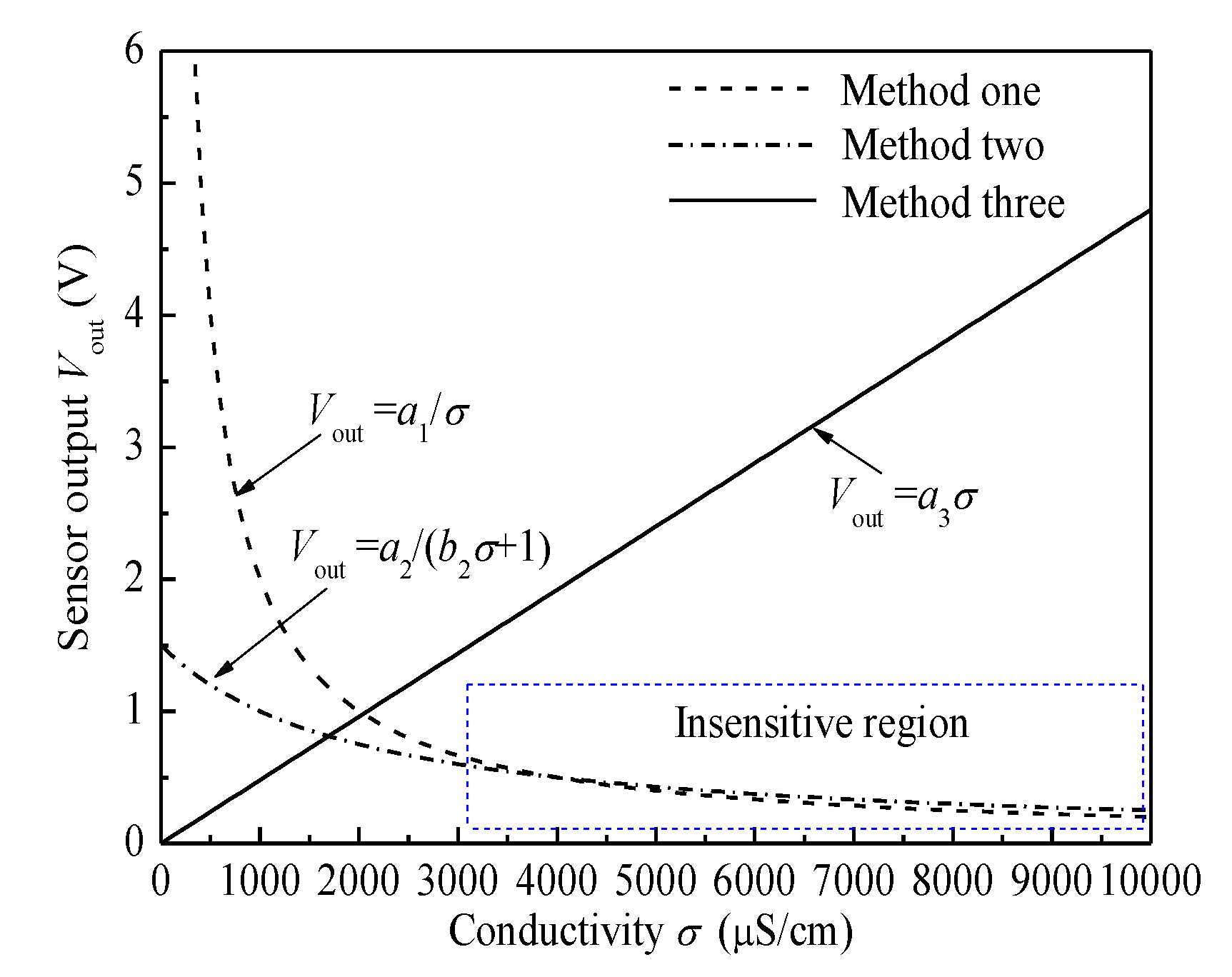
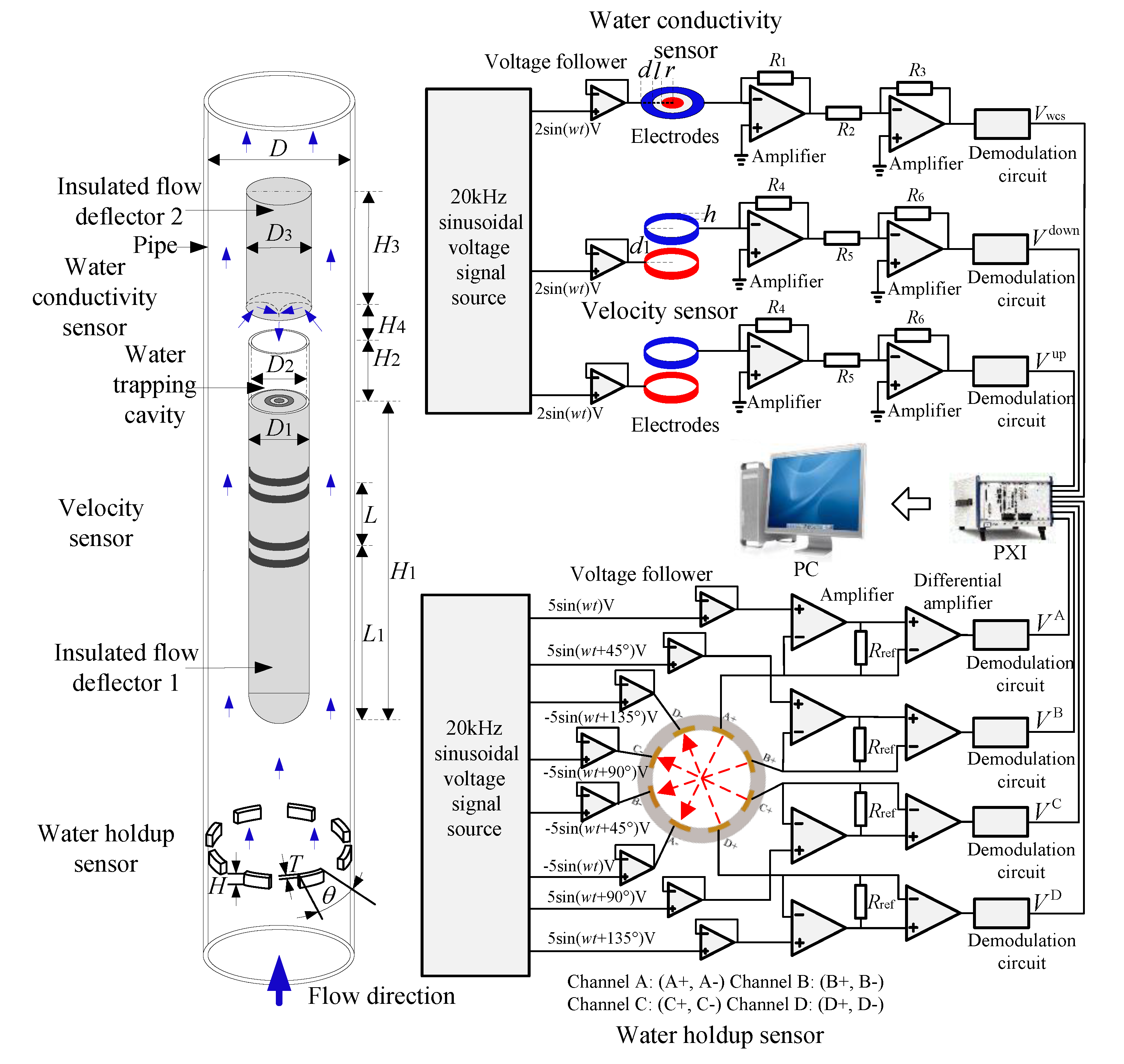
- The linear relationship between the sensor output and water conductivity is more suitable for conductivity detection under the conditions of changing water conductivity. Using the water holdup sensor, the velocity sensor, and water conductivity to form a combined conductance sensor system is an effective strategy to achieve salinity independent flow measurement in gas-water flows. As the sensor output is positively linearly proportional to the conductivity, the water holdup sensor and velocity sensor can capture the conductivity variation caused by water holdup under the conditions of water conductivity change with high and constant resolution. The water conductivity sensor can dynamically obtain water conductivity in the gas-liquid two-phase flow. In the calculation of water holdup, water conductivity is considered, thus the influence of salinity can be eliminated.
- For the water holdup measurement, a new water holdup measurement model based on flow structures was proposed. The bubble flow and liquid slugs in slug flow and churn flow were classified into high water holdup flow structures, and Taylor bubble of slug flow and the large gas structures of churn flow were classified into low water holdup flow structures. For the high water holdup flow structures, the Maxwell equation can achieve satisfactory water holdup measurement results. For the low water holdup flow structures, the Maxwell equation and Bruggemann equation all have limitations. Based on the characteristics of these structures, a new equation was established. Finally, a new water holdup measurement model was established to achieve salinity independent water holdup measurement in gas-water flows.
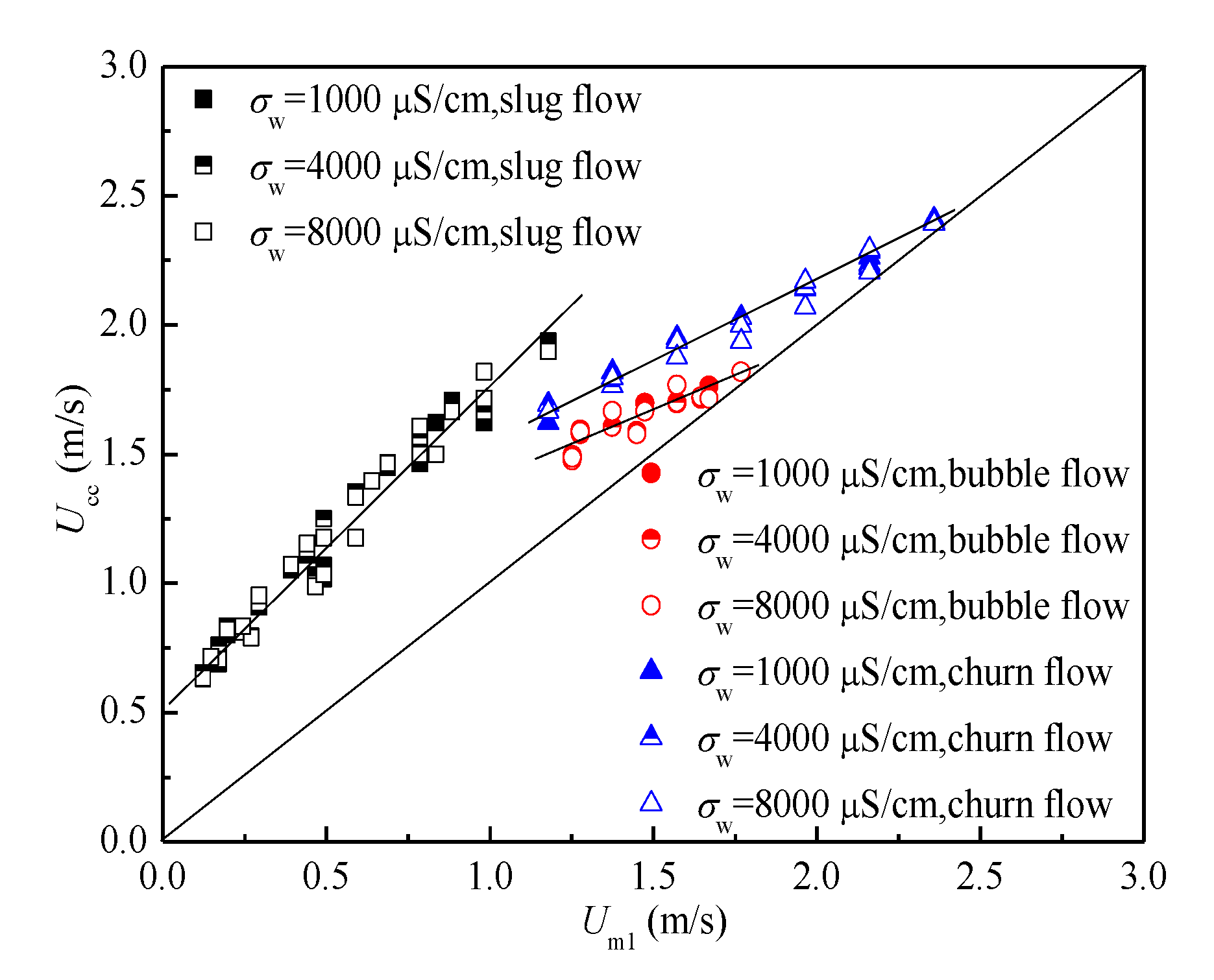
- As the output of the velocity sensor is linearly proportional to the conductivity, so the change of water conductivity only affects the amplitude of signals, and the resolution of the sensor to the conductivity variation caused by water holdup is not affected. Moreover, the fluid velocity is increased in the annular space, which enhances the correlation of upstream signal and downstream signal and simplifies the relationship between mixture velocity and cross-correlation velocity. The drift-flux model that considers the droplet size exponent, distribution parameter, and slippage velocity into consideration was established, and salinity independent flow velocity measurement was achieved satisfactorily. This paper presents a methodology to realize salinity independent flow measurement in gas-liquid flows using the conductance method from the perspective of theoretical analysis and experimental verification for the first time. It contributes to the application of the conductance method in dynamically monitoring oil wells with water salinity change. It is worth noting that for the conductance method, the change of temperature also affects the water conductivity; therefore, the method discussed in this study can also be applied to flow conditions with a changing temperature.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| a | Proportion of high water holdup structures | Usg | Gas superficial velocity |
| b | Proportion of low water holdup structures | Usw | Water superficial velocity |
| C0 | Distribution parameter | Terminal rise velocity of a single gas bubble relative to the continuous water phase | |
| C01 | Distribution parameter in annular space | Vs | Value of exciting voltage signal |
| D1 | Diameter of insulated flow deflector 1 | V1 | Voltage output 1 |
| d1 | Distance between two ring-shape electrodes | Vout | Sensor output |
| D4 | Diameter of cylindrical insulated plexiglass rod | VA | Voltage output of channel A |
| E | Relative error | VB | Voltage output of channel B |
| G | Value of equivalent conductance | VC | Voltage output of channel C |
| Normalized conductivity | VD | Voltage output of channel D | |
| H | Axial height of electrodes | Vwcs | Output of water conductivity sensor |
| h | Height of electrode | Vup | Output of upstream sensor |
| H1 | Length of insulated flow deflector 1 | Vdown | Output of downstream sensor |
| H4 | Distance between insulated flow deflector 1 and insulated flow deflector 2 | Yd | Holdup of dispersed phase |
| I | Value of current | Yg | Gas holdup |
| Is | Value of exciting current signal | Yg1 | Gas holdup in annular space |
| k | A constant relating to the configuration of electrode | Yw | Water holdup |
| L | Distance between upstream and downstream sensors | θ | Field angle of electrodes |
| L1 | Distance between upstream sensor and the head of insulated flow deflector 1 | Threshold | |
| N | Amplification factor | Conductivity | |
| n | Droplet size exponent | Conductivity of conducting continuous media | |
| Rm | Value of equivalent resistance | Conductivity of dispersed phase | |
| Rref | Value of reference resistance | Conductivity of mixture | |
| R1 | Resistance 1 | Water conductivity | |
| R2 | Resistance 2 | Conductivity measured by channel A | |
| R3 | Resistance 3 | Conductivity measured by channel B | |
| R4 | Resistance 4 | Conductivity measured by channel C | |
| R5 | Resistance 5 | Conductivity measured by channel D | |
| R6 | Resistance 6 | Conductivity measured by upstream sensor | |
| T | Radial thickness of electrodes | Conductivity measured by downstream sensor | |
| Ucc | Cross-correlation velocity | ||
| Um | Mixture velocity | ||
| Um1 | Mixture velocity in annular space |
References
- Johansen, G.A.; Jackson, P. Salinity independent measurement of gas volume fraction in oil/gas/water pipe flows. Appl. Radiat. Isot. 2000, 53, 595–601. [Google Scholar] [CrossRef]
- Sætre, C.; Johansen, G.A.; Tjugum, S.A. Salinity and flow regime independent multiphase flow measurements. Flow Meas. Instrum. 2010, 21, 454–461. [Google Scholar] [CrossRef]
- Bo, O.L.; Nyfors, E. Application of microwave spectroscopy for the detection of water fraction and water salinity in water/oil/gas pipe flow. J. Non-Cryst. Solids 2002, 305, 345–353. [Google Scholar]
- Xie, C.G. Measurement of multiphase flow water content and water-cut. AIP Conf. Proc. 2007, 914, 232–239. [Google Scholar]
- Seraj, H.; Rahmat, M.F. Review of water salinity measurement methods and considering salinity in measuring water area phase fraction of wet gas. Sens. Transducers 2014, 162, 208–214. [Google Scholar]
- Zhao, C.J.; Wu, G.Z.; Li, Y. Measurement of water content of oil-water two-phase flows using dual-frequency microwave method in combination with deep neural network. Measurement 2019, 131, 92–99. [Google Scholar] [CrossRef]
- Costigan, G.; Whalley, P.B. Slug flow regime identification from dynamic void fraction measurements in vertical air-water flows. Int. J. Multiphas. Flow 1997, 23, 263–282. [Google Scholar] [CrossRef]
- Song, C.H.; Chung, M.K.; No, H.C. Measurement of void fraction by an improved multi-channel conductance void meter. Nucl. Eng. Des. 1998, 184, 269–285. [Google Scholar] [CrossRef]
- Devia, F.; Fossa, M. Design and optimization of impedance probes for void fraction measurements. Flow Meas. Instrum. 2003, 14, 139–149. [Google Scholar] [CrossRef]
- Jin, N.D.; Zhao, X.; Wang, J.; Wang, Z.Y.; Jia, X.H.; Chen, W.P. Design and geometry optimization of a conductivity probe with a vertical multiple electrode array for measuring volume fraction and axial velocity of two-phase flow. Meas. Sci. Technol. 2008, 19, 045403. [Google Scholar] [CrossRef]
- Rocha, M.S.; Simões-Moreira, J.R. Void fraction measurement and signal analysis from multiple-electrode impedance sensors. Heat Transf. Eng. 2008, 29, 924–935. [Google Scholar] [CrossRef]
- Kim, J.R.; Ahn, Y.C.; Kim, M.H. Measurement of void fraction and bubble speed of slug flow with three-ring conductance probes. Flow Meas. Instrum. 2009, 20, 103–109. [Google Scholar] [CrossRef]
- Xu, L.J.; Xu, W.F.; Cao, Z.; Liu, X.B.; Hu, J.H. Multiple parameters’ estimation in horizontal well logging using a conductance-probe array. Flow Meas. Instrum. 2014, 40, 192–198. [Google Scholar] [CrossRef]
- Ko, M.S.; Lee, B.A.; Won, W.Y.; Lee, Y.G.; Jerng, D.W.; Kim, S. An improved electrical-conductance sensor for void-fraction measurement in a horizontal pipe. Nucl. Eng. Technol. 2015, 47, 804–813. [Google Scholar] [CrossRef] [Green Version]
- Lee, Y.G.; Won, W.Y.; Lee, B.A.; Kim, S. A dual conductance sensor for simultaneous measurement of void fraction and structure velocity of downward two-phase flow in a slightly inclined pipe. Sensors 2017, 17, 1063. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kong, W.H.; Li, L.; Kong, L.F.; Liu, X.B. Calibration of mineralization degree for dynamic pure-water measurement in horizontal oil-water two-phase flow. Meas. Sci. Rev. 2016, 16, 218–227. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Han, Y.F.; Ren, Y.Y.; Zhang, H.X.; Zhang, H.; Jin, N.D. Water holdup measurement of oil-water two-phase flow with low velocity using a coaxial capacitance sensor. Exp. Therm. Fluid Sci. 2017, 81, 244–255. [Google Scholar] [CrossRef]
- He, D.H.; Chen, S.L.; Bai, B.F. Void fraction measurement of stratified gas-liquid flow based on multi-wire capacitance probe. Exp. Therm. Fluid Sci. 2019, 102, 61–73. [Google Scholar] [CrossRef]
- Zhai, L.S.; Meng, Z.H.; Yang, J.; Zhang, H.X.; Jin, N.D. Detection of interfacial structures in inclined liquid-liquid flows using parallel-wire array probe and planar laser-induced fluorescence methods. Sensors 2020, 20, 3159. [Google Scholar] [CrossRef]
- Beck, M.S. Correlation in instruments: Cross correlation flowmeters. J. Phys. E Sci. Instrum. 1981, 14, 7–19. [Google Scholar] [CrossRef]
- Yan, Y. Mass flow measurement of bulk solids in pneumatic pipelines. Meas. Sci. Technol. 1996, 7, 1687–1706. [Google Scholar] [CrossRef]
- Thorn, R.; Johansen, G.A.; Hammer, E.A. Review article: Recent developments in three-phase flow measurement. Meas. Sci. Technol. 1997, 8, 691–701. [Google Scholar] [CrossRef]
- Saoud, A.; Mosorov, V.; Grudzien, K. Measurement of velocity of gas/solid swirl flow using Electrical Capacitance Tomography and cross correlation technique. Flow Meas. Instrum. 2016, 53, 133–140. [Google Scholar] [CrossRef]
- Zhang, W.B.; Wang, C.; Wang, Y.L. Parameter selection in cross-correlation-based velocimetry using circular electrostatic sensors. IEEE T Instrum. Meas. 2010, 59, 1268–1275. [Google Scholar] [CrossRef]
- Gajewski, J.B. Accuracy of cross correlation velocity measurements in two-phase gas-solid flows. Flow Meas. Instrum. 2013, 30, 133–137. [Google Scholar] [CrossRef]
- Wang, D.Y.; Jin, N.D.; Zhuang, L.X.; Zhai, L.S.; Ren, Y.Y. Development of a rotating electric field conductance sensor for measurement of water holdup in vertical oil-gas-water flows. Meas. Sci. Technol. 2018, 29, 075301. [Google Scholar] [CrossRef]
- Wang, D.Y.; Jin, N.D.; Zhai, L.S.; Ren, Y.Y. Measurement of oil-gas-water mixture velocity using a conductance cross-correlation flowmeter with centre body in small pipe. IEEE Sens. J. 2019, 19, 4471–4479. [Google Scholar] [CrossRef]
- Wang, D.Y.; Jin, N.D.; Zhai, L.S.; Ren, Y.Y. A novel online technique for water conductivity detection of vertical upward oil-gas-water pipe flow using conductance method. Meas. Sci. Technol. 2018, 29, 105302. [Google Scholar] [CrossRef]
- Maxwell, J.C. A Treatise on Electricity and Magnetism; Clarendon: Oxford, UK, 1882. [Google Scholar]
- Bruggeman, D.A.G. Berechnung verschiedener physikalischer konstanten von heterogenen substanzen. Ann. Phys. 1935, 24, 636. [Google Scholar] [CrossRef]
- Archie, G.E. The electrical resistivity log as an aid in determining some reservoir characteristics. Trans. AIME 1942, 146, 54–62. [Google Scholar] [CrossRef]
- Sen, P.N.; Scala, C.; Cohen, M.H. A self-similar model for sedimentary rocks with application to the dielectric constant of fused glass beads. Geophysics 1981, 46, 781–795. [Google Scholar] [CrossRef]
- De La Rue, R.E.; Tobias, C.W. On the conductivity of dispersions. J. Electrochem. Soc. 1959, 106, 827–832. [Google Scholar]
- Saiz-Jabardo, J.M.; Bouré, J.A. Experiments on void fraction waves. Int. J. Multiphas. Flow 1989, 15, 483–493. [Google Scholar] [CrossRef]
- Kytömaa, H.K.; Brennen, C.E. Small amplitude kinematic wave propagation in two-component media. Int. J. Multiphas. Flow 1991, 17, 13–26. [Google Scholar] [CrossRef]
- Lucas, G.P.; Jin, N.D. A new kinematic wave model for interpreting cross correlation velocity measurements in vertically upward, bubbly oil-in-water flows. Meas. Sci. Technol. 2001, 12, 1538–1545. [Google Scholar] [CrossRef]
- Zhai, L.S.; Jin, N.D.; Gao, Z.K.; Zhao, A.; Zhu, L. Cross-correlation velocity measurement of horizontal oil-water two-phase flow by using parallel-wire capacitance probe. Exp. Therm. Fluid Sci. 2014, 53, 277–289. [Google Scholar] [CrossRef]
- Zuber, N.; Findlay, J.A. Average volumetric concentration in two-phase flow systems. J. Heat Trans. 1965, 87, 453–468. [Google Scholar] [CrossRef]
- Harmathy, T.Z. Velocity of large drops and bubbles in media of infinite or restricted extent. AIChE J. 1960, 6, 281–288. [Google Scholar] [CrossRef]









© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Jin, N.; Zhai, L.; Ren, Y. Salinity Independent Flow Measurement of Vertical Upward Gas-Liquid Flows in a Small Pipe Using Conductance Method. Sensors 2020, 20, 5263. https://doi.org/10.3390/s20185263
Wang D, Jin N, Zhai L, Ren Y. Salinity Independent Flow Measurement of Vertical Upward Gas-Liquid Flows in a Small Pipe Using Conductance Method. Sensors. 2020; 20(18):5263. https://doi.org/10.3390/s20185263
Chicago/Turabian StyleWang, Dayang, Ningde Jin, Lusheng Zhai, and Yingyu Ren. 2020. "Salinity Independent Flow Measurement of Vertical Upward Gas-Liquid Flows in a Small Pipe Using Conductance Method" Sensors 20, no. 18: 5263. https://doi.org/10.3390/s20185263