1. Introduction
Water distribution and wastewater infrastructures are aging and are in regular need of costly maintenance. The buried pipe network for water and wastewater in the UK is around 800,000 km in combined length [
1], and the UK’s water infrastructure is the product of over 250 billion pounds of investment [
2]. It is estimated that over 3000 million litres of water are lost to leaks every day in the UK [
3]. Mobile robots could be used for autonomous, persistent monitoring of a buried pipe network, locating faults and returning to an operator to report the information. The aim would be to reduce the resources required for manual inspection, to improve the spatial coverage and frequency of inspection, and thereby to improve the overall resilience of the water services. An example water pipe network that such a robot would operate in is given in
Figure 1.
A principal challenge for such a robotic system would be to reliably and precisely estimate the location of a fault in a buried pipe in the absence of long-range communication, a global positioning system, and a magnetic compass in a pipe network that is relatively featureless. This is a simultaneous localization and mapping (SLAM) problem [
4,
5], where the pose (and sometimes the previous trajectory) of the robot and the location of a fault need to be estimated. The robotic system must operate in pipes with a typical diameter of 150 mm or less and must be smaller than this diameter to not affect the flow of water. The scale of the robotic system therefore limits the design to high-noise sensors, uncertain motion, and low computational power. However there are advantages in that the buried pipe environment is simple, constrained, largely unchanging with time, and somewhat mapped as shown in
Figure 1, giving prior knowledge with some uncertainty.
Conventional sensors, such as cameras, sonars, lasers, ultrasound range-finders, and inertial measurement units (IMUs), have been applied to the problem of localization in pipes in a number of ways. Visual odometry has been performed using images from a camera focused on the pipe wall [
6] or along the axis of the pipe [
7]. Detection and recognition of junctions and corners has also been developed [
8] and augmented by structured light [
9,
10], use of time-of-flight imagery [
11], and projection of a laser spot array [
12] or projected radial lines [
13].
Although these visual methods are effective, there are difficulties in adapting the required hardware to the constraints of the pipe environment. For example, a light source is required, which consumes additional power, and the camera might become obscured in the dirty environment of sewers. This motivates exploration of alternative sensing technologies for pipe environments.
Dead reckoning methods based on inertial measurement units (IMUs) and odometry have been used with drift correction to estimate location in pipe networks. IMUs typically use a magnetometer and accelerometer to give absolute measurements of heading and downwards direction and use gyroscopes for rate of change in angles. In the pipe environment, it is expected that the magnetometer component will not give a reliable measurement of heading angle, and so, the measurement using the gyroscope alone will suffer from drift due to integrated error [
14,
15]. Therefore, methods have been developed to use IMU measurements in combination with tethers measuring distance travelled [
16,
17], knowledge of known landmark positions [
18,
19], and knowledge of the length of pipe sections [
20] in order to correct drift. IMUs have also been used to detect features such as junctions and corners [
15,
21,
22].
To compensate for the otherwise feature-sparse nature of the pipe environment, alternative sensing methods can be used. These methods include the use of a tether cable to measure distance travelled [
17] and, similarly, using latency in the arrival of a sound wave from a fixed source [
23]. However, these methods require a tether to the robot, which limits the desired autonomy in this application. Another approach is to create a spatial field using an emitter at a fixed point using radio frequency waves [
24]. While this method has been shown to achieve accurate localization in the intended application in large pipes, the requirement for the emitter to be located in a fixed position separate from the receiver on the mobile robot again limits the desired autonomy. The reduction in autonomy given by these alternative sensing methods motivates the use of features in the environment that can be detected using only one non-tethered robot.
In previous work, we have used a hydrophone emitter-receiver positioned on a robot to perform localization [
25,
26]. The hydrophone emits a sound wave that interacts with a metal pipe in a way that varies over space and so can be used to recognise location. The limitation of previous work is that only
online localization is done, which only estimates the current location. Instead, in this work, the full trajectory is estimated, which would allow better estimation of the location of faults in the pipe detected by the robot. The objective information available and methods used here are therefore different. We present a novel solution here for full trajectory estimation using a pose-graph optimization method [
27,
28,
29,
30,
31].
Pose-graph optimization uses efficient sparse nonlinear least squares methods to estimate the robot location. These back-end estimation algorithms tend to be commonly usable across application domains. However, the front-end construction of the pose graph from sensor data tends to be unique to the application, which is the case here. We propose and evaluate four alternative methods for constructing the pose graph from the spatially varying hydrophone acoustic signal: 1. linear fit, 2. quadratic fit, 3. cross correlation and kernel cross correlation [
32], and 4. phase correlation.
Similar pose-graph optimisation methods have been developed for use with an ambient distorted magnetic field in an application in drilling robots [
14] and ambient electric and magnetic fields in a two-dimensional indoor environment [
32,
33,
34,
35]. The contribution of this paper is the presentation of an approach with two key differences to these pieces of work. Firstly, the focus in this work is on achieving a soft loop-closing effect rather than only explicitly matching subsets of measurements to find loop-closures. This exploits the continuous nature of the measured spatial field to avoid the requirement for robustness in feature detection and matching. Secondly, where correlation approaches are used in a similar way to the related work to estimate loop-closures, further development has been made to estimate uncertainty in the loop-closure estimates.
In order to evaluate the pose-graph optimization algorithm, we use data recorded in a 5-m long metal pipe filled with water, which is an order of magnitude longer than in our previous work [
25,
26]. We also analyse the performance of the algorithm in simulations over much larger scales than we could do in a laboratory, which relates more closely to real-world pipe networks. The simulations are driven by synthetic data that are derived from experimental data to provide realistic evaluations.
The paper is structured as follows. The acoustic spatial field, experimental data, and synthetic data are described in
Section 2. In
Section 3, the pose-graph optimization problem is defined and the estimation algorithm is derived. This includes the methods of adding spatial field information to the pose graph. The results from experimental work and simulations that demonstrate the effectiveness of the proposed pose-graph optimization algorithm are given in
Section 4. A discussion of the work is given in
Section 5. Finally, conclusions are given in
Section 6.
3. Methods: Robot Localisation Using Pose Graph Optimization
3.1. Conventional Pose Graph Optimization for Pipe Robots
In this section, we define the conventional pose-graph optimization problem that can be used to localise a robot in a pipe with respect to conventional features, such as pipe junctions and corners.
We assume that a robot moves along a pipe according to the motion model:
where
is the robot position in one dimension along the axis of the pipe at sample time
t,
is an input,
g is the nonlinear state transition function, and
is Gaussian random state noise where
.
The robot is able to detect landmarks such as junctions and corners in the pipe section, where we assume data association is known, giving the following model:
where
is the measurement at time
t of landmark feature
i,
refers to environment features
i,
h is the nonlinear measurement function, and
is Gaussian random measurement noise where
. In this case, the robot only makes measurements of landmarks when they are nearby, so for many time indices
t, there will be no measurements.
The typical pose-graph optimisation problem [
36] is defined by the cost function:
where
is the initial state which has uncertainty
and where
T and
I are the number of time steps and features, respectively. The solution is sought as
where
is given by
This optimization problem is solved iteratively. The solution can either use analytic methods, where the gradient (or Jacobian) in the solution space is known, or can use numerical methods to compute this gradient.
3.2. Pose Graph Optimization Using an Acoustic Signal
It is desired to simultaneously optimize the trajectory estimate with respect to the feature measurements and acoustic signal measurements. This would allow the incorporation of prior knowledge, more feature measurements, or more signal measurements without further alteration of the problem.
Therefore, to incorporate the acoustic signal term
into the pose-graph optimisation problem, we augment the cost function with an additional term
which defines a measure of inconsistency in the estimated spatial signal measurements along the pipe. This is given by
where
and
are positions and acoustic measurements along the pipe, and
is the covariance of this field measurement model noise. The remaining terms are the same as in Equation (
6), and again, the cost function is minimize as in Equation (
7).
The function
generally has the following form:
where
y is a function giving some measurement of the signal
and
f is a function giving the expected value of that measurement, much like the terms
z and
h, respectively.
In the specific implementations of this function presented in the following section, is either the signal value or a measured distance equal to zero between two matching points, and is either the value of a local best fit function over a region of x or the distance between two matching points in the current estimate of .
Unlike the typical cost function terms, this term does not necessarily give a measure of difference in distance and can instead be a measure of distance in the abstract spatial signal quantity. Also, unlike the typical measurement term z, the measurement component of this term, y, is dynamic and is updated at each iteration of the optimization.
3.3. Spatial Signal Information Methods
This section presents a number of specific implementations of the general cost function term in Equation (
10). In this application, the robot moves twice along a pipe, recording measurements of the spatial signal of vibration amplitude. These measurements of the spatial signal can be used to improve estimatation of the robot’s trajectory.
Assuming the robot has travelled along the pipe twice, the signal can be split into two sets: one for motion in each traversal of the pipe. This method could be extended simply to signals from multiple sets if the robot has moved along the pipe multiple times. Perfect knowledge of the robot’s trajectory would mean that the two signals would be aligned and would correspond to the true spatial signal. However, the signals are warped along the spatial axis due to uncertainty in the position along the pipe at which each measurement was taken. Essentially, aligning the two signals within the other constraints of the pose graph increases the likelihood of accuracy of the corresponding set of poses and is equivalent to finding and matching features as done in typical robot localization.
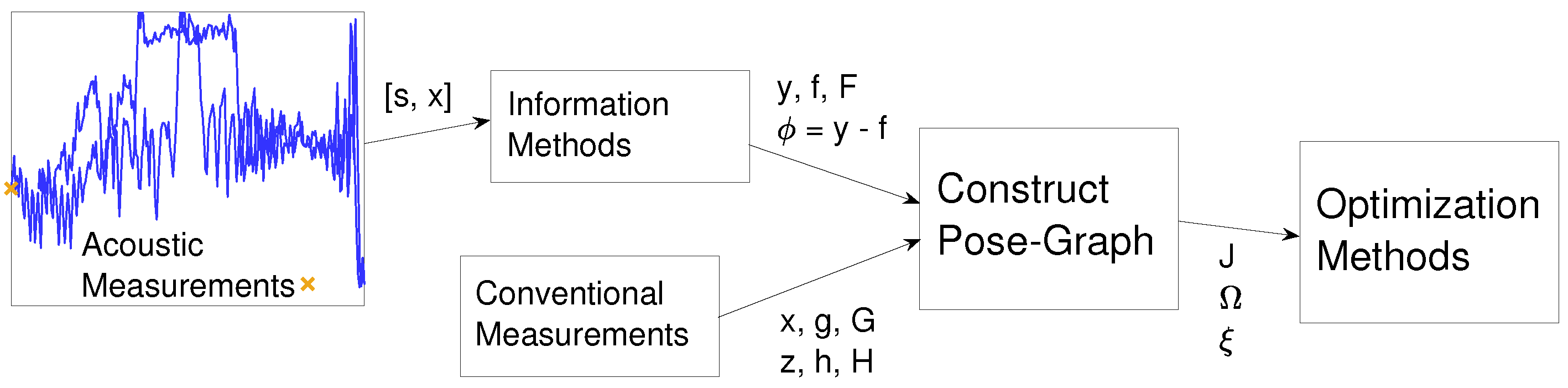
In this section, methods for incorporating information from the spatial signal measurements to the pose graph are described, represented by the
information methods block in
Figure 4. Throughout the section,
refers to the current position estimate of the pose at time
t and
refers to the measurement of the spatial signal at time
t.
and
(from Equation (
10)) are referred to as
and
, respectively, and are defined in each of the following subsections for each information method.
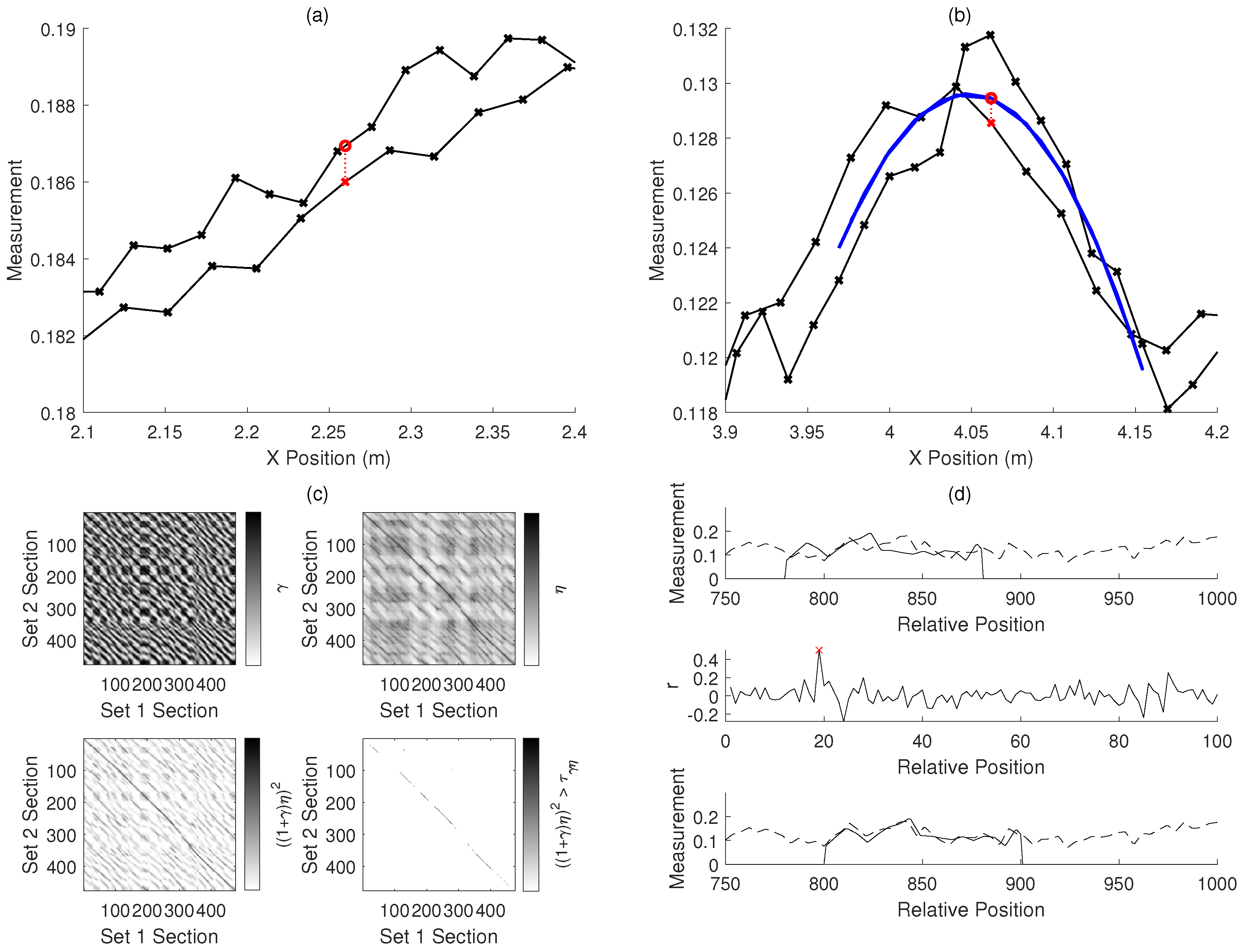
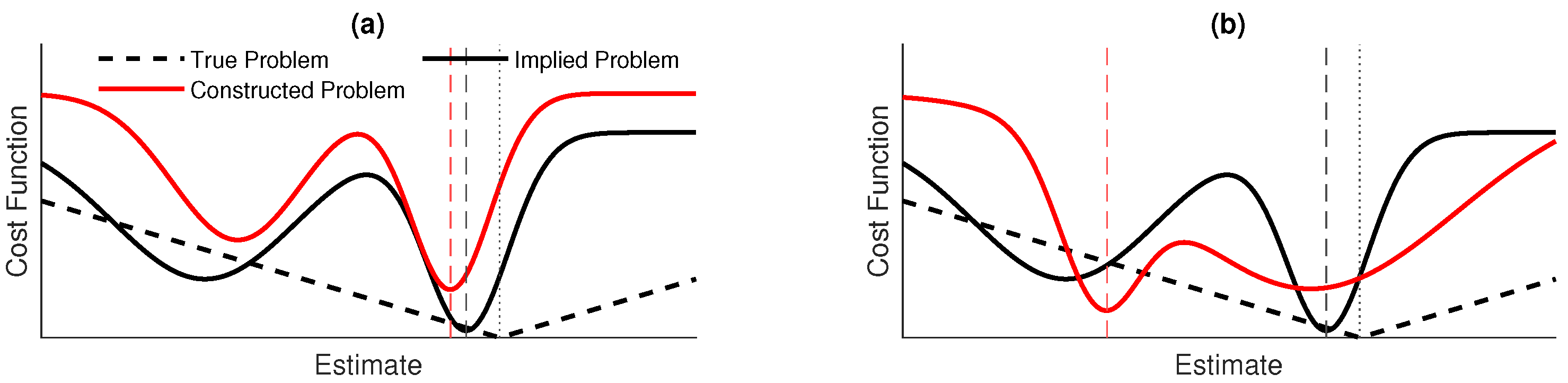
3.3.1. Two-Point Linear Fit Prediction
For each pose
, the nearest two poses in the current estimate,
and
, and corresponding signals,
and
, are found. It is predicted that
will lie on the straight line drawn between the points
a and
b as given by
and illustrated in
Figure 5a. For incorporation with the analytical optimization method, the Jacobian of
is needed with respect to
. This is given by
which excludes the matrix that would be used to map each term in the Jacobian to the correct position in the vector of poses. For each iteration, this prediction is made for each pose and the resulting information is added to the pose graph. In principle, a prediction of the position of the pose
can be made directly from the linear fit. However, in practice, for two signals of similar value, the gradient of the linear fit is very small and the prediction can be very far from the current estimate, leading to instabilities in the optimization.
3.3.2. Quadratic Fit Prediction
For each pose, the poses and measurements within a window distance
are used to create a local quadratic fit, parameterized by
,
, and
. It is predicted that
will lie on this quadratic curve, as given by
and illustrated in
Figure 5b. A multi-scale quadratic fit can be done, where the prediction is made for a number of window sizes and all the resulting information is incorporated into the optimization.
The Jacobian is needed to incorporate the prediction into the analytical optimization; however, in this case, the calculation is difficult as the quadratic parameters
,
, and
are all functions of
. Instead,
and
are treated as constants and the Jacobian can be computed as
This approximation of
,
, and
as constants means that the cost associated with this prediction is only applied to one pose:
. There are therefore limitations on the optimization methods that can be used (which are described in
Section 3.4) as the information cannot be incorporated into Matlab’s
PoseGraph Optimization functions. The approximation also introduces error in the analytical optimization; however, the method qualitatively appears to work effectively.
As in the linear fit method, in principle, a prediction of the position of could be made directly from the quadratic fit. However, as well as the problems in the linear fit case, signals outside of the measurement axis range of the quadratic function would have an undefined position estimate, so it is not possible to use in many cases.
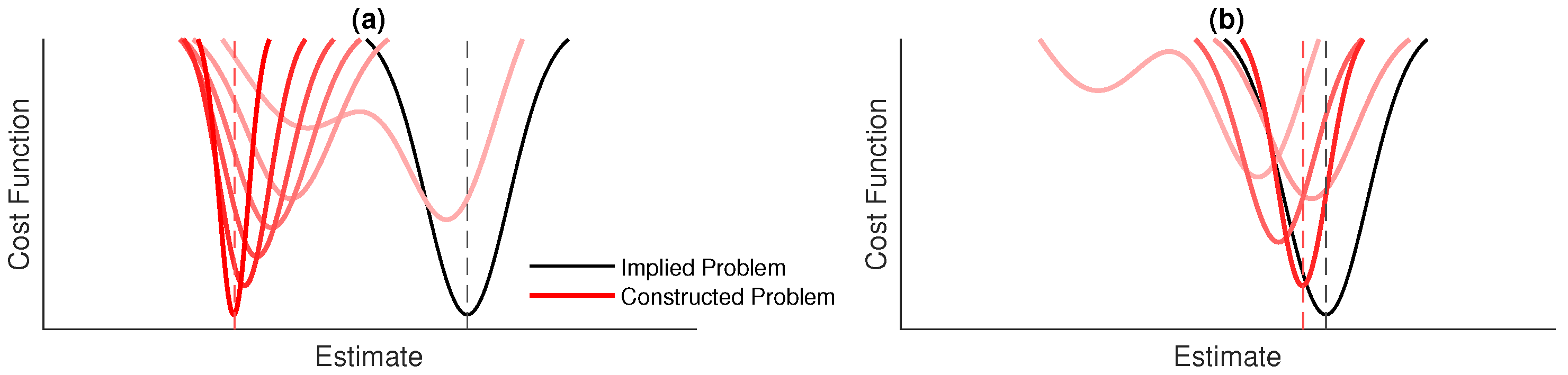
3.3.3. Cross-Correlation Matching
The signal is split into two sets (
,
), one for each traversal of the pipe, and matches between corresponding poses in each set are found using cross-correlation, as done in a similar work [
14].
Interpolation is used to create two sets of points (
,
) of equal number
. The normalized cross-correlation coefficient is then found between subsets of points (
,
) of smaller number (
and
), which are taken across the whole set of points. The normalized cross-correlation coefficient is given by
and is a measure of the match between sets of points. Alternatively, as the magnitude of the signals is expected to be consistent at each point along the pipe, the sum of difference between the two subsets can also be used as a measure of a match, described by
The results of Equations (
15) and (
16) are shown in
Figure 5c. A value
is found from
If
is greater than a threshold
, the poses corresponding to
and
are considered matches and are added to the cost function term in Equation (
10) at poses corresponding to the centre of the matching sections,
and
. The measured distance and expected distance are given by
Note that the choice to match the poses at the centre of each sequence is unlikely to be accurate; however, further matching within these sequences would give an increase in complexity.
The correlation process to estimate the matching points
and
is dependent on a number of poses in
; however, the simple approximation of
in Equation (
19) allows for easy computation of the Jacobian as
The covariance
can be set to be inversely proportional to the product of
and
, so that stronger matches are effectively weighted higher in the cost function in Equation (
6).
3.3.4. Kernel Cross-Correlation Matching
An improvement to linear cross-correlation described in the previous section may be to use
kernel cross-correlation [
37], which should be more robust to signal noise and distortion. This is implemented as follows, assuming a similar process as described in the previous section is used to create a number of subsets of points given by (
,
).
A kernel vector is defined as
between two sets of points, using a Gaussian kernel with a parameter
.
is computed, and a correlator
is defined in the Fourier domain using
where
is the Fourier domain kernel vector and
is the target response in the Fourier domain, where the corresponding spatial domain response
is defined as a vector where all elements are equal to 1, indicating a match.
For each test subset
and corresponding Fourier domain kernel vector
, a similarity measure is found using
where ∘ denotes the element-wise multiplication of the two vectors. In this work, the value
is used in the same was as the value
as described in the previous section, and the same process is used to add information to the pose graph.
3.3.5. Phase-Correlation Matching
As in the cross-correlation method, the signal is split into two sets and interpolation is used to find equivalent sets with an equal number of points. Phase-correlation is used to find the offset, if it exists, between smaller subsets of points. The phase-correlation method is described by
where
and
are the Fourier transforms of
and
,
is the complex conjugate of
,
is the inverse Fourier transform, and ∘ denotes the element-wise multiplication of the two vectors. This is illustrated in
Figure 5d.
Again, as in the cross-correlation method, the difference between the two sequences
and
is used, as given in Equation (
16). As a large value of the peak,
, in the cross-power function
corresponds to a good match between sequences, if the product of
from Equation (
16) and
is larger than a threshold
, the match is added to the cost function term in Equation (
10) between poses corresponding to the centre of the compared sections, offset by
. The measured and predicted values used in Equation (
10) are given by
Similarly to the cross-correlation method, the covariance can be set to be inversely proportional to the product of
and
, and Equation (
20) can be used as the Jacobian in this method too. The same assumptions regarding the choice to match the two poses
and
are also made in this case.
3.4. Optimization Solution Methods
To minimise the cost function in Equation (
9), the original GraphSLAM algorithm [
36] uses the information form described by the parameters
and
, which is an inverse to the covariance form, to parameterize the probabilistic estimation. This relationship is respectively defined as
and
for the covariance,
, and the mean,
, of the probability distribution of the pose estimate
.
The terms
g,
h, and
f in the quadratic cost function in Equation (
9) can be linearized to derive an equation which is quadratic in
x, the variable which is to be estimated. This gives the linearised cost function:
where
is the information form matrix, which is a function of the uncertainty in measurements and the Jacobian of the expected measurement models, and
is the information form vector, which is a function of the same variables and the measurements, expected measurements, and current pose estimate.
The construction of this cost function corresponds to the
construct pose-graph block in
Figure 4. The cost function in Equation (
28) can be minimized by using the relation between the information form and covariance form to iteratively update the estimate of
. This optimization corresponds to the final block in
Figure 4.
The use of analytical optimization requires derivation of an analytical Jacobian for the measurement and motion models. These tend to be known for the case of typical mobile robot models; however, the addition of the spatial field to the estimation can require calculations which are difficult to derive in the case where large numbers of poses are used and can be prone to instability. Therefore, simplifications have to be made when using this optimization method with some of the information methods described in
Section 3.3.
The Gauss–Newton method, Levenbert–Marquardt method, and trust region methods, as examples, can be used to minimize a sum of squares function [
38] by numerically computing the Jacobian rather than needing it to be explicitly defined. These methods as well as others are implemented in Matlab’s
Optimization Toolbox in the
lsqnonlin function and Matlab’s
Navigation Toolbox in the
optimizePoseGraph function.
4. Results
The novel pose-graph optimization algorithm using an acoustic signal defined in Equation (
9) is evaluated in this section, comparing the four methods proposed above for incorporating the acoustic signal into pose-graph optimization:
linear fit,
quadratic fit,
cross-correlation, and
phase-correlation. These are compared to pose-graph optimization without using an acoustic signal, just using landmark
features at each end of the pipe, as defined in Equation (
6). These pose-graph optimization methods are also compared to
dead reckoning.
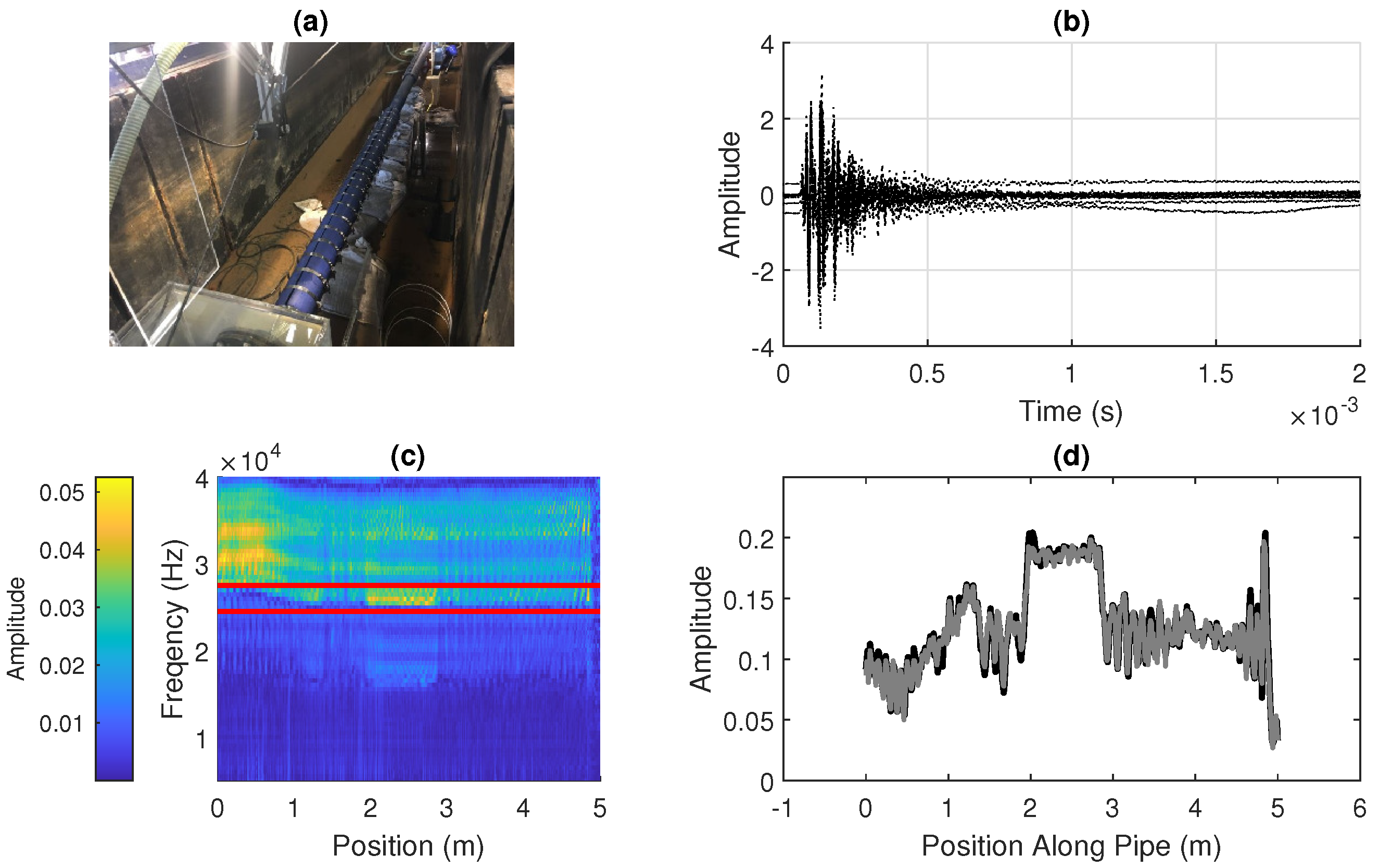
The experimental data (shown in
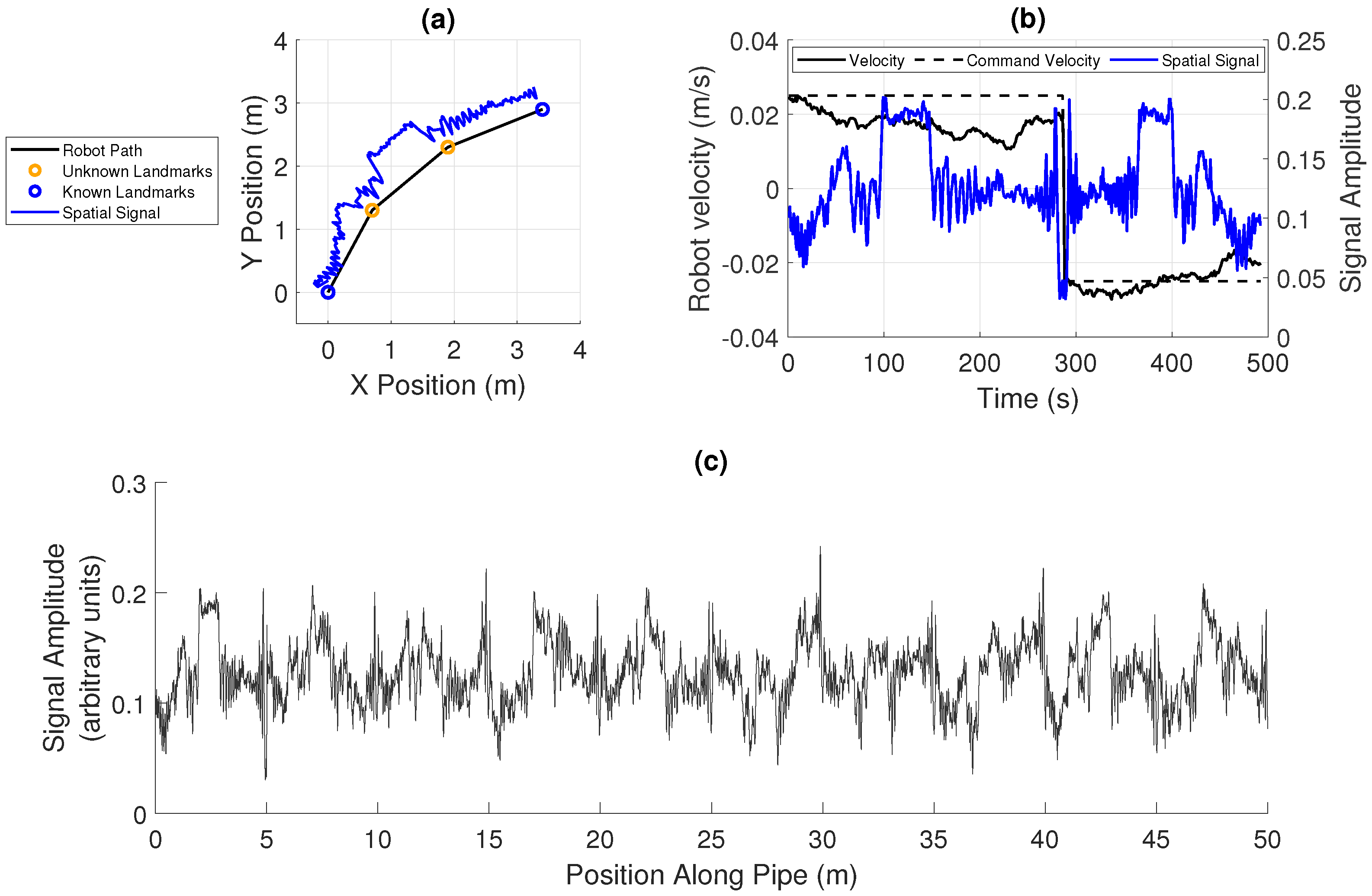
Figure 2d) and synthetic data (which is derived from the experimental data, as described in
Section 2 and shown in
Figure 3c), is used to compare the effectiveness of the developed localization methods. The objective is to estimate the location of a robot that has travelled twice along a pipe, once in each direction.
The uncertainty in the robot’s position is modelled by integrated random normally distributed noise on the robot’s velocity, which results in a drifting velocity, as shown in
Figure 3b. The variance of the normally distributed noise added to the motion at each time step is equal the noise magnitude multiplied by the command motion. The robot’s motion is constrained between 0.2 and 1.8 times the command motion. The magnitude of the noise is set to be proportional to the length of the pipe, so the difference between each set of data is only the shape of the spatial signal, as it is the performance of the methods for different shapes of data that is to be compared.
Two metrics, the variance in error and the error, are used to compare results between different methods. The variance in estimation at each point along the pipe is a measure of how consistent the estimate is and is effectively what the information methods aim to reduce directly. The error in the estimate is a measure of the accuracy of the estimate and is desired to be reduced overall; however, there is no means to do this directly. Some quantitative results are presented here, followed by a discussion in the following section.
4.1. Comparison of Methods
An example of the use of the optimization methods is shown in
Figure 6. The optimized trajectory shown in
Figure 6a uses only the features at the ends of the pipe to improve the estimate. The original
dead reckoning estimate can be seen to differ substantially from the true trajectory; the estimated trajectory is outside of the length of the pipe, and the shape of the acoustic signal is shifted along the pipe. The original estimate can also been seen as inconsistent as the shapes of the signal recorded in each direction are not aligned. The
pose-graph optimization trajectory using only the
features at the end of the pipe can be seen to be much more accurate and consistent; however, there is still some misalignment in the acoustic signals and a maximum error of around 0.25 m. The limitations of the
features method are shown by the estimation of the robot’s velocity. As the method adds no information between the features, the optimization must use only a fixed mean velocity, which is seen to differ from the real drifting velocity.
The optimized trajectory shown in
Figure 6b uses a combination of the phase-correlation and quadratic fit methods. It is shown to be mostly consistent in the two directions along the pipe and is close to the true value. This is illustrated by the matching estimate of spatial signal, by low variance of error, and by the good match between the noisy velocity and the estimated velocity. Compared to the
features estimate, the variance in error is much lower as the trajectory estimate is very consistent and the error in the estimate is generally lower.
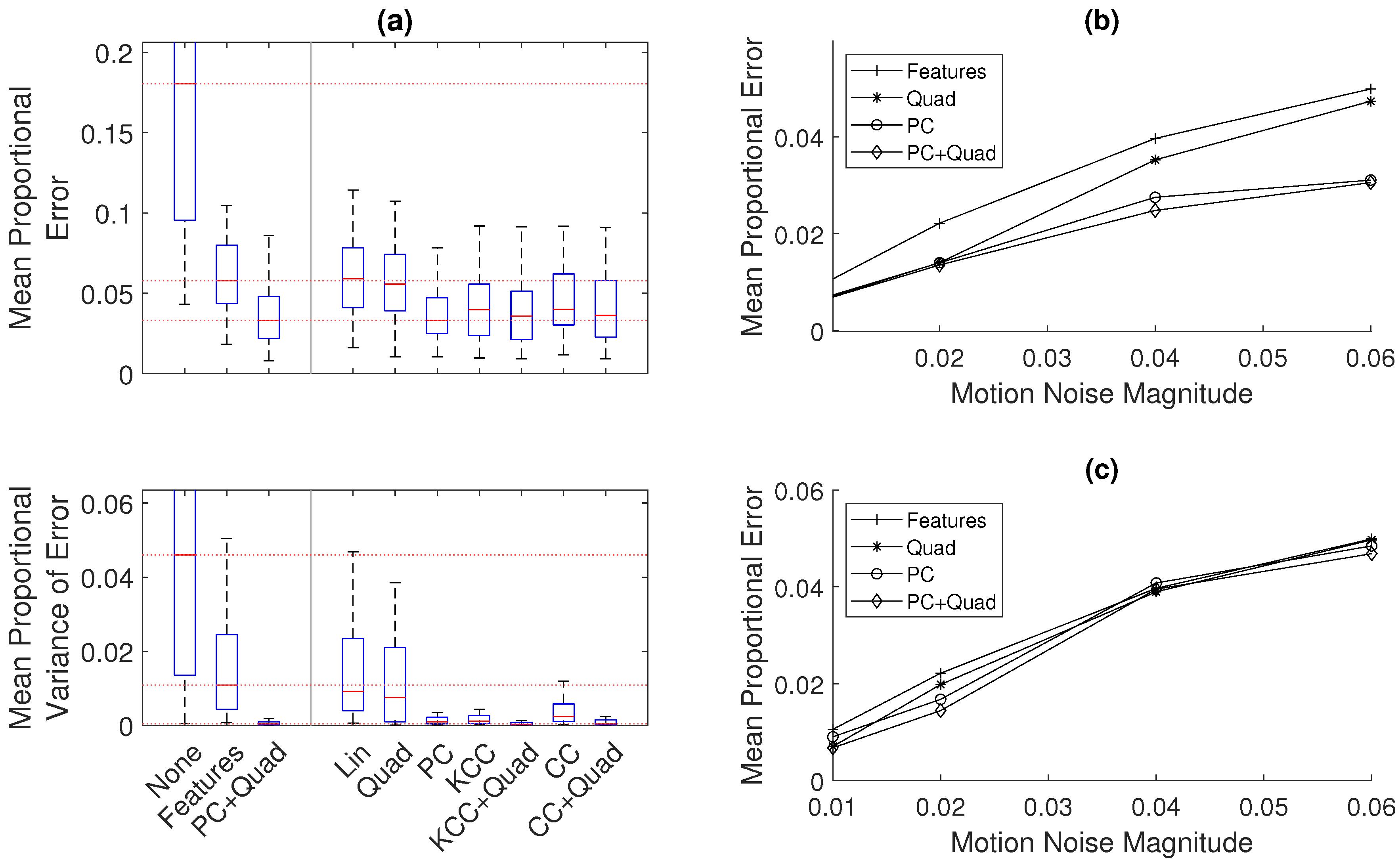
The main result is shown in
Figure 7, where the methods are compared using the same fifty sets of random noise.
Figure 7a shows that the median error is 74% lower when using only the pipe ends as
features compared to the simple estimate using no optimization. The use of additional information methods (
quadratic fit and
phase-correlation (
PC+Quad)) is shown to give a median error that is 84% lower than the error without optimization. The method presented here therefore has a median error 39% lower compared to the typical optimization method using only feature measurements.
In this case, it is seen that the use of the linear fit and quadratic fit methods alone are shown to give only a small increase in accuracy. The use of cross-correlation (CC) and kernel cross-correlation (KCC) gives a larger improvement to accuracy, and the use of phase-correlation (PC) and the combination of the quadratic fit and both cross-correlation (CC+Quad) and kernel cross-correlation (KCC+Quad) give a large improvement to accuracy, similar to that of the PC+Quad method. These results for error, the overall aim of the pose-graph optimization, are reflected in the measure of variance of error or in consistency in the acoustic measurements. The use of the PC+Quad, CC+Quad, and KCC+Quad methods are shown to give a very consistent estimate.
Figure 7b,c expand this result to different levels of motion noise. They show a comparison between this
features-only method and the methods using
phase-correlation and
quadratic fit. In
Figure 7b, which shows the comparison for a 5-m pipe, it is seen that the use of the
PC+Quad and
PC methods gives a consistent improvement to accuracy across a range of noise, while the accuracy when using the
Quad method decreases towards the benchmark accuracy with increasing motion noise.
Figure 7c shows the shows the comparison for a 20-m pipe. As in the 5-m case, as the noise increases, the performance of the
Quad method decreases more than that of the other methods, but it is seen that the accuracy of all methods decreases to that of the benchmark
features-only method for large values of motion noise. For the lower magnitudes of motion noise, the combination of the
PC+Quad method gives a lower error compared to using only the
PC method.
An increase in motion noise increases the initial misalignment of the signal measured in each direction along the pipe and an increase in the warping of the signal. As expected, the use of phase-correlation is required for improving the initial alignment of the signal so that further improvement can be found using the quadratic fit. However, it is seen that, at large values of noise for the fairly periodic 20-m signal, the signal in each direction is warped enough so that it is difficult for the method to find matching sequences of measurements, and therefore, the accuracy is not improved.
4.2. Sensitivity to Measurement Noise
Figure 8 shows an analysis of the sensitivity of the estimation to noise in the acoustic signal.
Figure 8a,b shows examples of the acoustic signal corrupted with noise.
Figure 8c,d shows how the performance of the
Quad,
PC, and
PC+Quad methods varies with measurement noise magnitude. These are compared to the results using the
features-only method, which should be unchanged with variation in measurement noise.
Figure 8c shows that, for the 5-m case with a motion noise of 0.06, the performance of all methods decreases with increasing measurement noise. However, the performance of the
PC+Quad method decreases slower than the performance of the
PC method, which shows that the former method is more robust to measurement noise.
Figure 8d shows similarly that, for the 20-m case with a motion noise of 0.02, the performance of all methods decreases. However, the performance found that using the
Quad method and
PC+Quad method does not degrade to that of the
features-only method. These results show the advantage of the addition of the
quadratic fit method. It gives a robustness to noise unlike the
phase-correlation-based method, which struggles to match sequences of measurements when corrupted by noise.
6. Conclusions
The use of pose-graph optimization for localization of a robot in an underground water pipe has been demonstrated. As an alternative to visual localization methods, four methods of incorporating information from the measurement of an acoustic spatial field are presented, described, and compared using simulations based on experimental acoustic measurements. The developed methods are designed to be applicable to any spatially varying property along the robot’s trajectory, such as magnetic or electric fields.
The proposed best method for incorporating this acoustic information is a combination of a correlation-based matching method and a quadratic fit-based prediction method. Compared to the standard pose-graph optimization method using typical features which gives an 74% lower average localization error compared to dead reckoning, the presented methods of incorporating spatial field measurements have an 84% lower average localization error. The use of matching-based methods is seen to give a larger improvement to accuracy at higher magnitudes of motion noise, while the use of prediction-based methods gives an improved robustness to measurement noise.
The study presented here has demonstrated the advantages of using the acoustic signal with pose-graph optimization; however, there were challenges to overcome in the implementation of this method. The first challenge was that the addition of the information methods in Equation (
9) can affect the convergence of the estimation algorithm: the data points from the
matching and
prediction functions are dependent on the model being fit to the data and, therefore, are dynamic and change at each iteration of the solution. This can lead to an increase in the residuals and divergence of the estimation algorithm, and therefore, more robust optimization algorithms are considered. The second challenge was the optimal choice of parameters for the information methods, such as the size of sequences of measurements to be matched or the choice of function to fit to the acoustic signal. Simultaneously using a range of parameters reduces the sensitivity to the choice of parameters at the cost of computational complexity.
Further work on this topic could be done. The use of pose-graph optimization in this work allows easy integration of other sensor measurements, so improvements to the results could be found by integrating visual and inertial sensing. The experimental evaluation could be improved by further real-world testing in a number of larger scale pipes to investigate the robustness of the method to a range of acoustic data. The method could also be extended to acoustic sensing in plastic pipes, where the hydrophone-induced vibration found in metal pipes could be replaced with ultrasonic sensing which can penetrate the plastic pipe. The sensitivity of the method to the parameters described could be investigated, and a means of finding an optimal set of parameters could be developed.


 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









