Numerical analysis is a comprehensive subject which is interconnected with applied mathematics, various fields of science and engineering, medical, etc. The most elemental and primal problem in this subject is to find the efficient and precise approximate solution
of a systems of nonlinear
where
, and this type of problem will be solved by the famous Newton’s method (
) which has second order convergence [
1] by
where
is the Jacobian matrix of the function and requires the evaluation of one
F, one
per iteration. Traub [
2] gave suggestion a multi-point schemes are best one to increase the order of convergence when absent of second derivatives, such methods have given in the literature; see [
3,
4,
5,
6,
7]. Traub [
2] gave a double-step Newton’s type method (
) having convergence order 3 by two
F, one
evaluations
where
is given in Equation (
1). The two-step Newton’s method (
) with convergence order four
was reconstructed by Noor et al. [
6], where
F and
are evaluated two times each. Abad et al. [
3] suggested the Newton type methods to get a 3-step 4th order method (
), where two evaluations of
F, two
are used
where
is given in Equation (
2). Sharma et al. [
7] presented a two-step 4th order method (
), where 1 time
F and 2 times
are evaluated per cycle, and it is given here
Babajee et al. [
8] gave a two-step 4th order scheme (
), where 1 time
F, 2 time
are evaluated per cycle and its given below
Abad et al. [
3], a different combination was used to get a three-step fifth order method, where three functions, two Jacobian matrices and their inverses were evaluated, and it is given below
Madhu et al. [
9] improved double step Newton’s method and also developed its multi-step version are given below
Literature Survey
Yang [
10] implemented an algebraic high compatible positioning via non iterative method employing direct solution of the double-difference pseudorange equations for solving the GPS double-difference pseudorange equations if two or more GPS receivers operate simultaneously. Pachter et al. [
11] improved the performance of estimation under high geometric dilution of precision (GDOP) conditions. In this work, the stochastic modeling algorithm for the GPS pseudorange equations is derived and compared with the conventional ILS algorithm. In order to achieve optimality when the trilateration system of equations becomes over-determined, Li et al. [
12] proposed an algorithm which uses the direct linearization technique to reduce the computation time overhead. Similarly, to investigate land-based radio positioning, Kwang-Soob et al. [
13], mathematically derived two-dimensional positioning based on GPS Pseudorange linearized state equation in which the geometry model with respect to triangles are formed using unit-vectors. GPS navigation solution using iterative least absolute deviation approach has been described by Jwoa et al. [
14] based on the Least Absolute Deviation (LAD) criterion for estimating navigation solutions since the least square technique is very much sensitive to accuracy and the performance for mitigating GPS multipath errors. In Awange et al. [
15], an alternative closed form GPS pseudo-ranging four-point problem P4P in matrix form using multi polynomial resultant and Groebner basis has been implemented in algebraic software such as
Mathematica and
Maple to solve the nonlinear GPS pseudo-ranging four-point equations. In general, the positioning module of the GNSS receiver use conventional Taylor series and Bancroft algorithms for solving non-linear pseudorange equations. Elnaggar [
16] presented a modified Taylor series method which linearizes the pseudorange equation by considering four satellite coordinates and pseudorange values for improving the positioning. On the other hand, Abad et al. [
3] described a solution for GPS pseudorange equations by solving different iterative methods for four visible satellites.
In this work, we have considered four or more than four visible satellites scenario for linearizing the pseudorange equations for obtaining better GDOP value and one can notice that the computational order calculation is not matching with the theoretical order when we increased the number of satellites more than four, most of the iterative methods does not match with the theoretical order but the new multistep iterative method described here approximately matches with the order and still preserves the accuracy. Initially the set of nonlinear problems are solved using various iterative methods and then the GNSS pseudorange nonlinear equations are solved in the next section. The input GNSS signal simulated from OROLIA simulator has been given as an input to the software based GNSS receiver to find the user position. The proposed iterative technique used in the position calculation module of the GNSS receiver is depicted in
Figure 1.
The input signal is acquired and the number of visible satellites are passed on to the tracking module to lock the code and carrier phase. Further, in the position calculation module the iterative methods are used to find the user position. The conventional way of solving GPS pseudorange equations involve Taylor series and iterative methods which typically take more than 6 iterations if the number of visible satellites are considered to be 4 but in the proposed work, the user position is computed within 3 iterations that significantly reduce the computation time in the position calculation module of the GPS receiver.
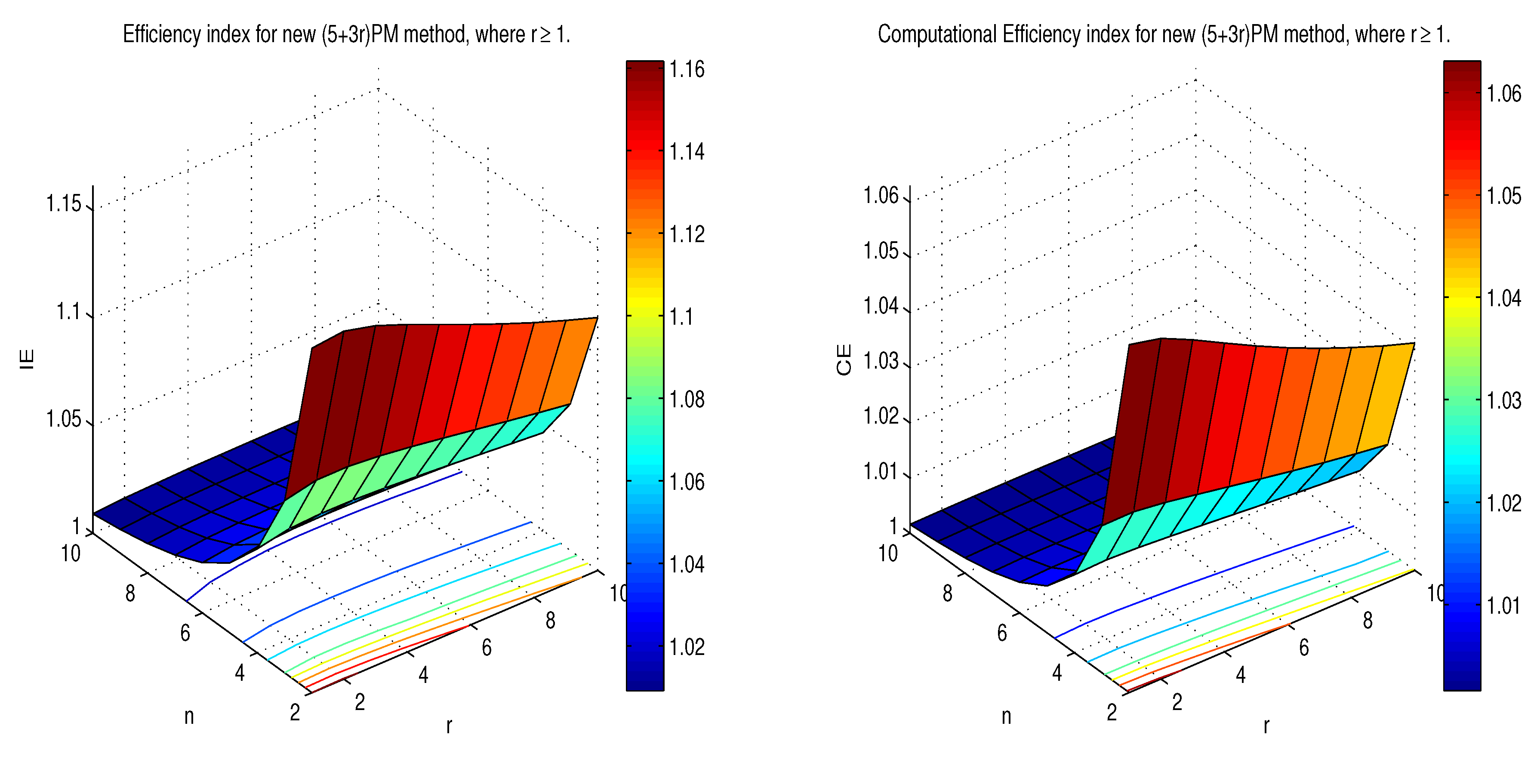
The content of the paper is formulated as follows: a new method of 5th order and their multi-step scheme with
order, and its convergence analysis are presented in
Section 2. In
Section 3, numerical test problems are given and it is theoretical convergence order is analyzed and the results are validated through
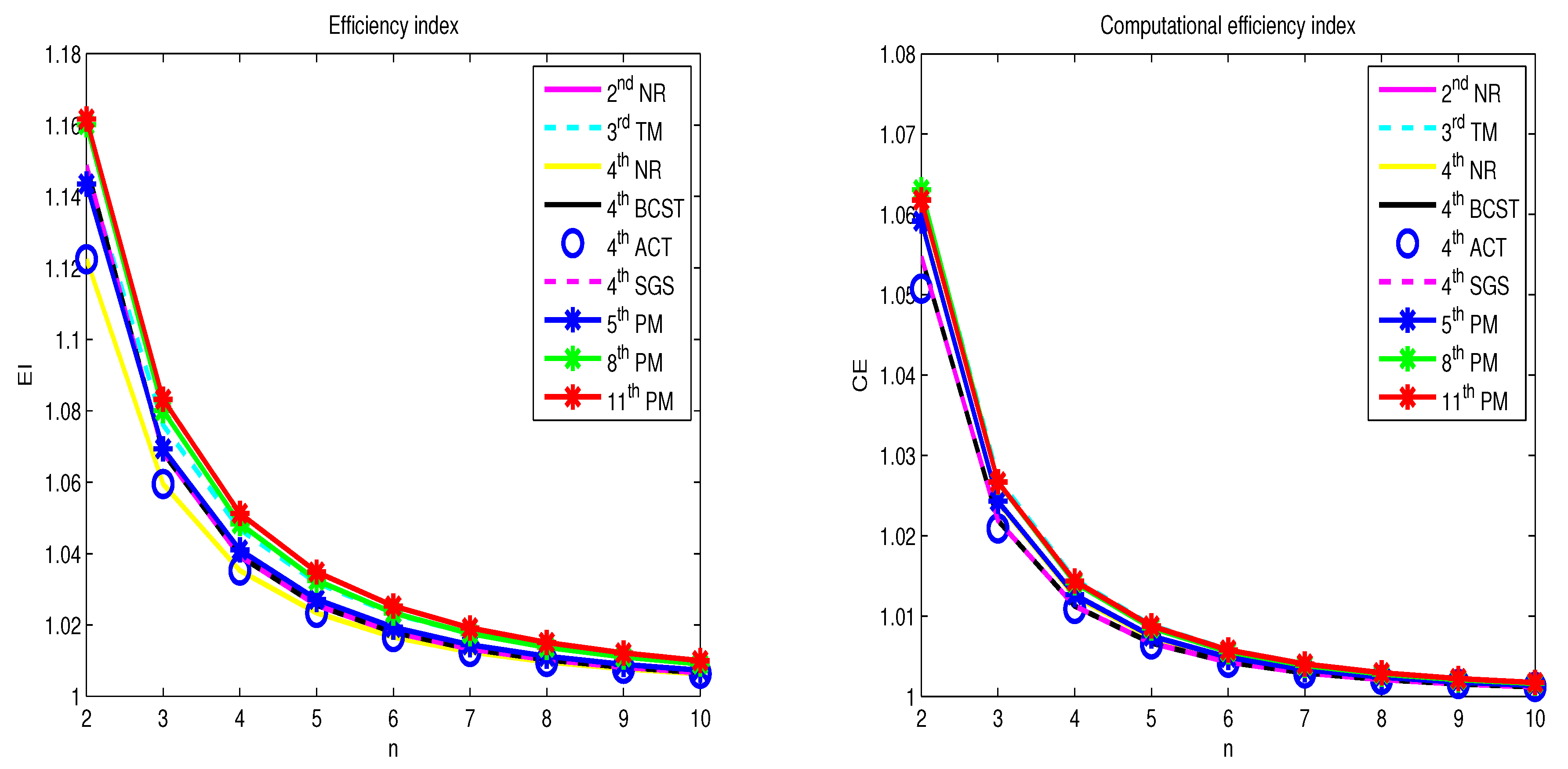
Matlab simulation. The efficiency index and computational efficiency index are given in
Section 4. The GNSS application problem is carried out for new methods and few existing methods are described in
Section 5. Test problems and application problem results are discussed in
Section 6. The final section is concluded with extending this work on solving position calculation of GNSS multi-constellation receiver.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}