1. Introduction
Direction of arrival (DOA) estimation is an important array signal processing technique that finds broad applications in underwater passive sonar systems. An important goal for DOA estimation is to be able to locate closely spaced sources in the presence of considerable noise. Utilizing this technique, passive sonar systems can detect, localize, and track underwater acoustic sources by monitoring with an array with spatially separated sensors. DOA estimation has been an active research area during the last two decades. Conventional techniques for DOA estimation, such as beamforming, have been widely applied in the field of passive sonar. However, they can only provide limited angular resolution. Well-known methods to improve angular resolution are implementation of longer arrays or super-resolution subspace-based methods. Unfortunately, the applicability of both techniques is constrained when applied in a complex underwater environment. Firstly, the implementation of long towed linear arrays (TLA) dedicated to platforms such as unmanned underwater vehicles (UUVs) is frequently impossible because of structure constraints (e.g., heavy cables). Secondly, in realistic underwater environments, the received signals are temporally correlated as a result of multi-path arrivals. Under these conditions, the performance of subspace-based methods, such as multiple signal classification (MUSIC), will significantly degrade. Therefore, how to approach the problems mentioned above has attracted much interest in recent years [
1,
2].
Traditional beamforming and spatial spectrum estimation algorithms are mostly based on uniform linear half-wavelength arrays (ULAs). For conventional ULAs, it is necessary to increase the number of sensors in order to obtain a high resolution coupled with the aperture of the array. This leads to higher critical hardware cost and more difficulty in array design [
3,
4]. Sparse arrays have considerable advantages over the conventional ULAs. When the number of sensors is the same, sparse arrays will occupy more space, which means longer array geometry, larger aperture, and increased degrees of freedom (DOF). Because of this, higher accuracy and resolution of DOA estimation can be achieved [
5]. When the aperture is fixed, sparse arrays require fewer physical sensors and related electronics, and consequently reduce the physical array cost. In addition, due to the expansion of the inter-spacing of sensors, mutual coupling, whose magnitude is inversely proportional to the inter-element distance, will be reduced, and the performance of DOA estimation may suffer less from coupling nonideality [
6]. In general, a longer distance means less coupling, but in practice it also depends on the platforms, materials, etc. With these advantages, sparse arrays are being gradually and widely applied to underwater applications.
The existing sparse array structures include the Wichmann Array [
7], Minimum Redundancy Array (MRA) [
8], Minimum Hole Array (MHA) [
9], Sparse Ruler Array (SRA) [
10], Nested Array (NA) [
11], Co-prime Array (CA) [
12,
13], and so on. Among these arrays, the MRAs and MHAs have no closed-form expressions for their array geometries. NAs [
14,
15] and CAs [
16,
17] have been proposed and recently been widely studied. These two types of sparse arrays can provide closed-form expression for finding the array geometry, and they have obvious advantages on the design of array configurations utilizing a difference co-array (virtual array), which is crucial for sparse array modeling. Combined with relevant signal processing algorithms, sparse arrays can achieve the desired effect of detection and localization [
18,
19]. Meanwhile, the array combination technology based on sparse arrays, which is different from the co-array-like models, has been proposed and studied recently [
20].
It is widely acknowledged that because of the sparse spatial sampling in sparse arrays, grating lobes will appear and deteriorate the estimation performance. On basis of recent CA research, many solutions have been proposed to avoid the ambiguities caused by grating lobes. The solutions include processing the beam-domain output of two subarrays by a product processor or minimal processor [
21,
22], eliminating spurious peaks with fourth-order cumulants [
23], ad hoc methods such as DECOM [
24], and so on. Many applications, such as radar and underwater surveillance using hydrophones, can take advantage of co-prime arrays. In the remote sensing field, the product and minimal processor are widely applied [
25,
26]. In phased array and through-the-wall radar fields, the grating lobes suppression algorithms have been actively studied [
27,
28]. Although the relevant state-of-the-art works can reduce ambiguities in certain applications, there are some cases that should be considered. Assume that a CA with several subarrays is applied to a multi-targets location scenario. When DOA estimation such as conventional beamforming or MUSIC is carried out to each subarray, the grating lobes will be generated due to longer inter-element spacing than
. When the grating lobes of different subarrays overlap after product or minimal processing, some spurious peaks will appear and cannot be eliminated. Obviously, the spurious peaks lead to ambiguities and affect the performance of DOA estimation. In order to solve this problem, this paper proposes a corresponding processing method. The method is based on the co-prime properties of CA and the information extracted from subarrays, which can effectively identify spurious peaks and reduce ambiguities, especially when there are many targets. The proposed method can be further applied to many fields like underwater surveillance with high practical value.
This paper is organized as follows:
Section 2 introduces the array geometry, signal model, and beamforming method.
Section 3 presents the grating lobes suppression for single targets and multi-targets with the proposed processing flow. Simulation and discussion are shown in
Section 4, and
Section 5 concludes the paper.
2. Array Structure, Signal Model, and Beamforming
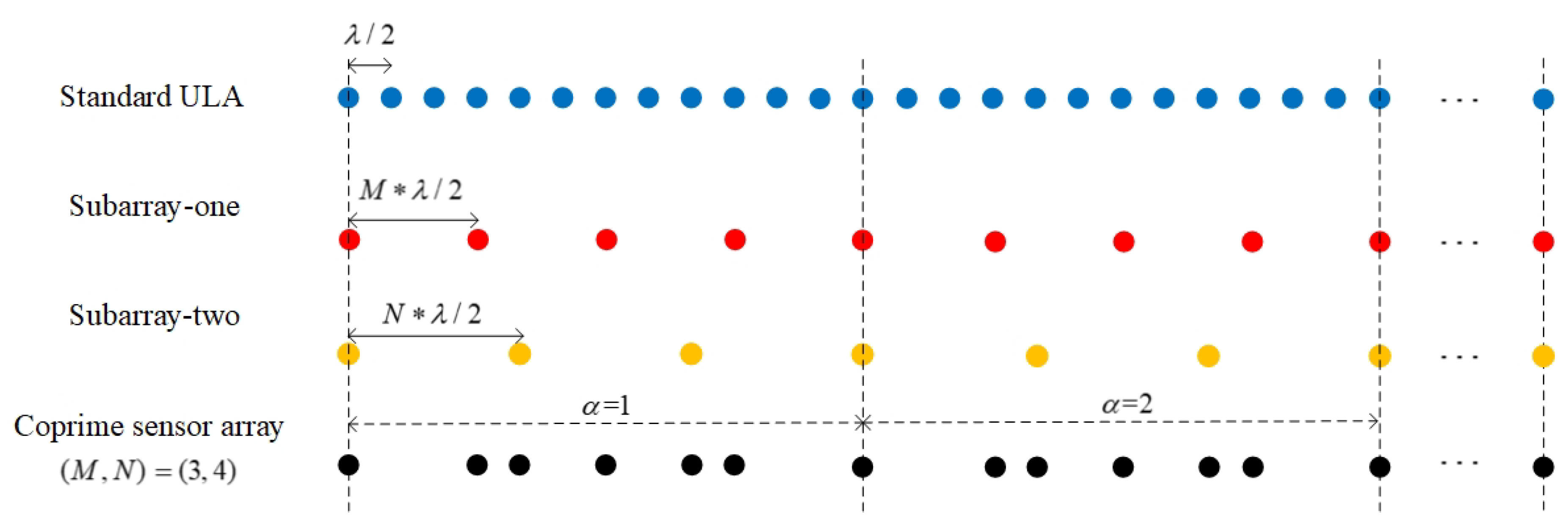
In this paper, the CA structure is composed of two co-prime subarrays. The positions of the 1st sensor in the two subarrays coincide, and the sensors in each subarray are arranged evenly and equidistantly. The inner spacing of sensors in the two subarrays is co-prime. As shown in
Figure 1, the co-prime pair of the two subarrays is
, where
M and
N are both positive integers
, and the array expansion factor is
. In subarray one, the number of sensors is
and the inner spacing is
. In subarray two, the number of sensors is
and the inner spacing is
.
is the half-wavelength of the impinging signal. Conventional beamforming (CBF) is employed as the signal processing method in this paper for conciseness, which can be further upgraded to MVDR methods or other robust beamforming algorithms. The scanning range is
.
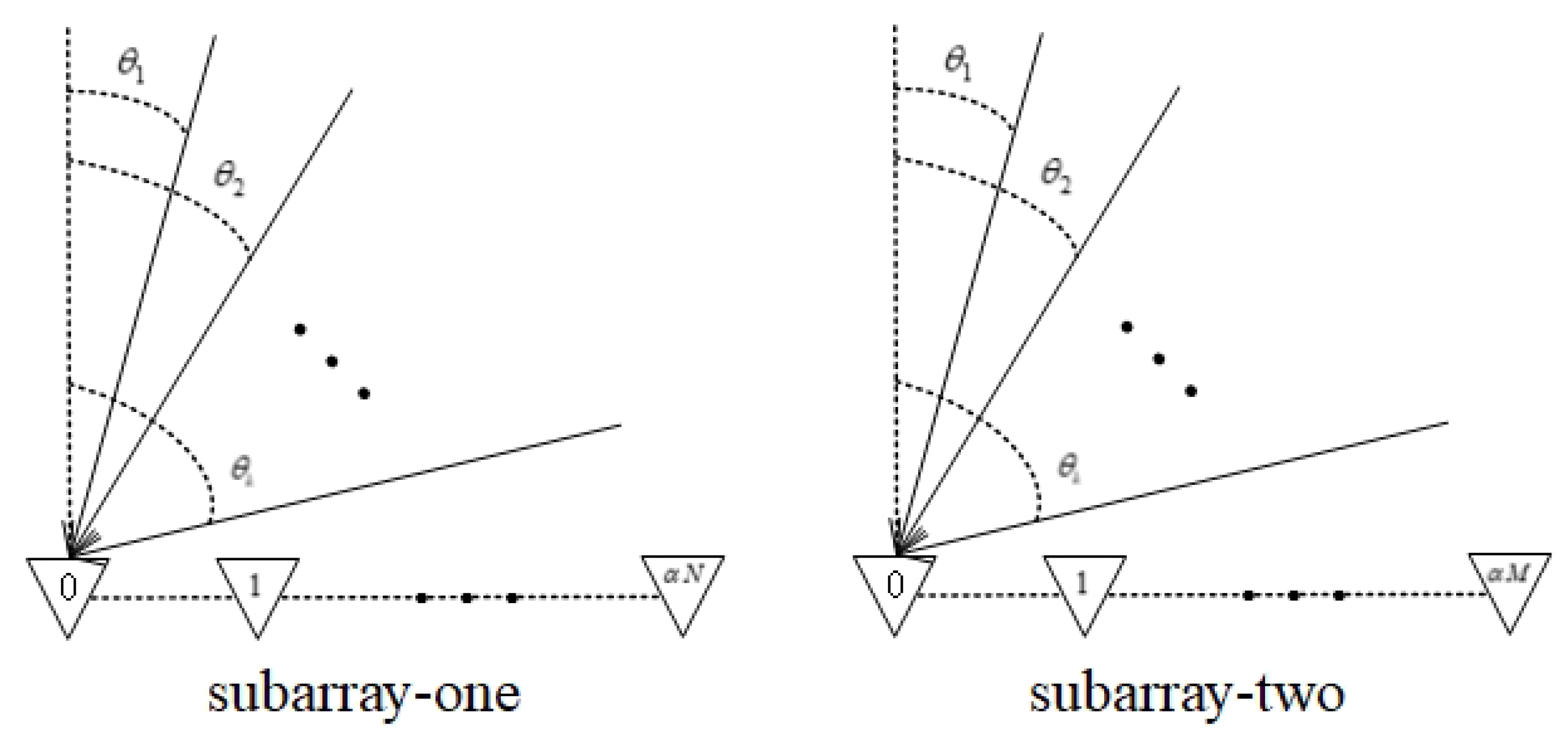
Assume that all the targets are in the far-field and the sources are all narrowband signals. As is shown in
Figure 2, the directions of
targets are
,
. Suppose
is the signal model of the
kth target, then
In Equation (
1),
is the amplitude of
,
is the phase of
, and
c is the velocity of sound. In an underwater sensing environment, all the parameters of the signals
are assumed to be random in this signal model. As a matter of fact, the original source signal parameters are basically different from each other. The amplitudes at the receiving point are related to the propagation distance from the sources, so
is random. When narrowband coherent sources exist or the multi-path effects appear, the wavelength of received signals is influenced, and then
is random. For the influence of the environment, the phase
of the received signals is also random, which is in the range of
[
29,
30]. For the amplitude and phase of the far field signal at time
t and time
, we have
and
. Then the relationship between
and
is
In Equation (
2),
is the
kth signal received at time
t, and the the impinging signal angle is
,
. Then the received signal
and
can be presented as Equation (
3),
In Equation (
3),
is the additive white Gaussian noise with unknown variance at the
nth receiver sensor of subarray one,
and
is the noise at the
mth receiver sensor of subarray two,
.
is the relative time lag for the
kth signal at the
nth sensor in subarray one, and
is the relative time lag for the
kth signal at the
mth sensor in subarray two. With Equation (
2), Equation (
3) can be expressed as
In Equation (
4),
is the direction of the
kth signal,
. Then, the received signal vectors of two subarrays can be expressed as
In Equation (
5),
and
are the vector form of signal received at time
t.
and
are the corresponding noise at time
t.
is the signal vector at time
t.
and
are the steering matrices of two subarrays.
and
are the steering vector,
.
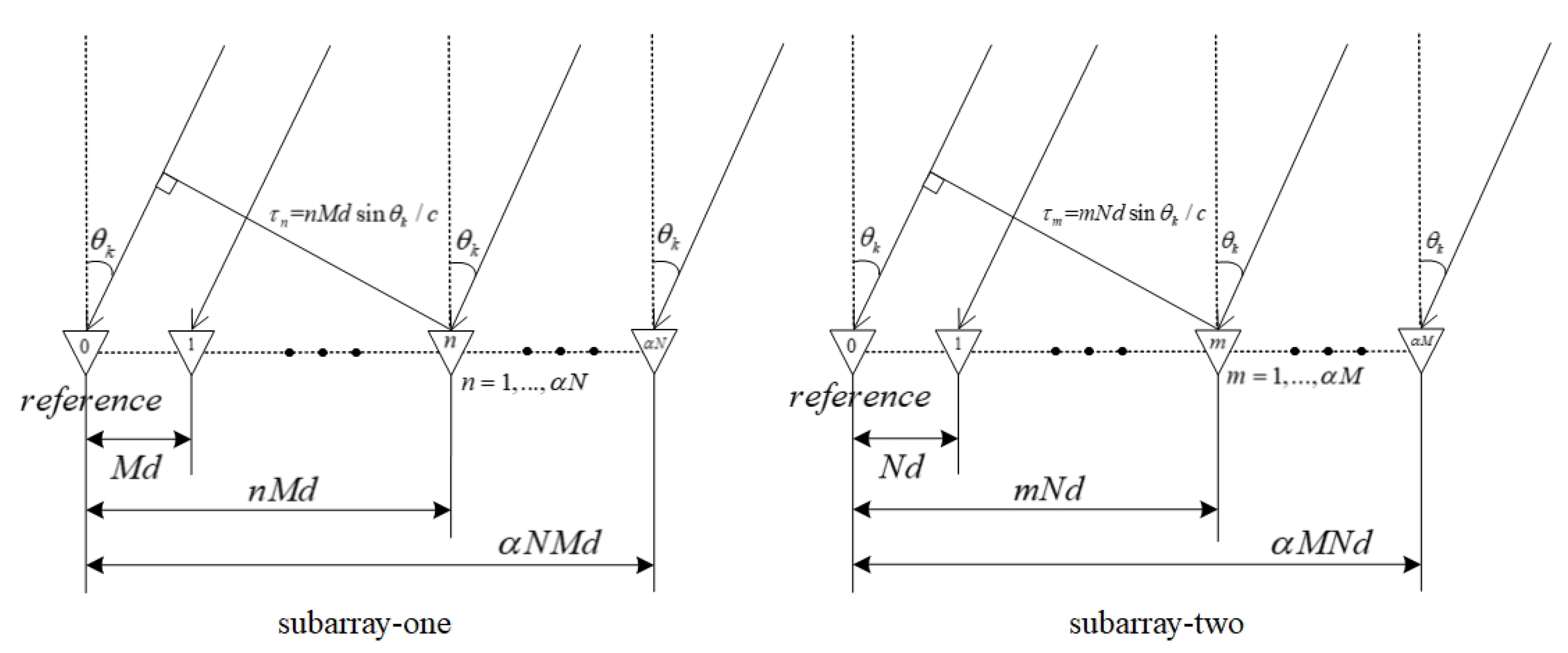
The first sensor of the two subarrays is shared at the coordinate origin as reference sensor. The relationship between the sensors in two subarrays and the reference sensor is shown in
Figure 3. There is a wave-path difference between the two sensors in each subarray. The wave-path difference between the
nth sensor and the reference sensor of subarray one is
, and the wave-path difference between the
mth sensor and the reference sensor of subarray two is
. Different wave-path differences lead to different phase lags
In Equation (
6),
is the center frequency of the signal, and because of its narrowband property,
. Then the phase lags
and
can be expressed as
From Equation (
7), when the phase lags between two sensors are known, the DOA of the signals can be estimated.
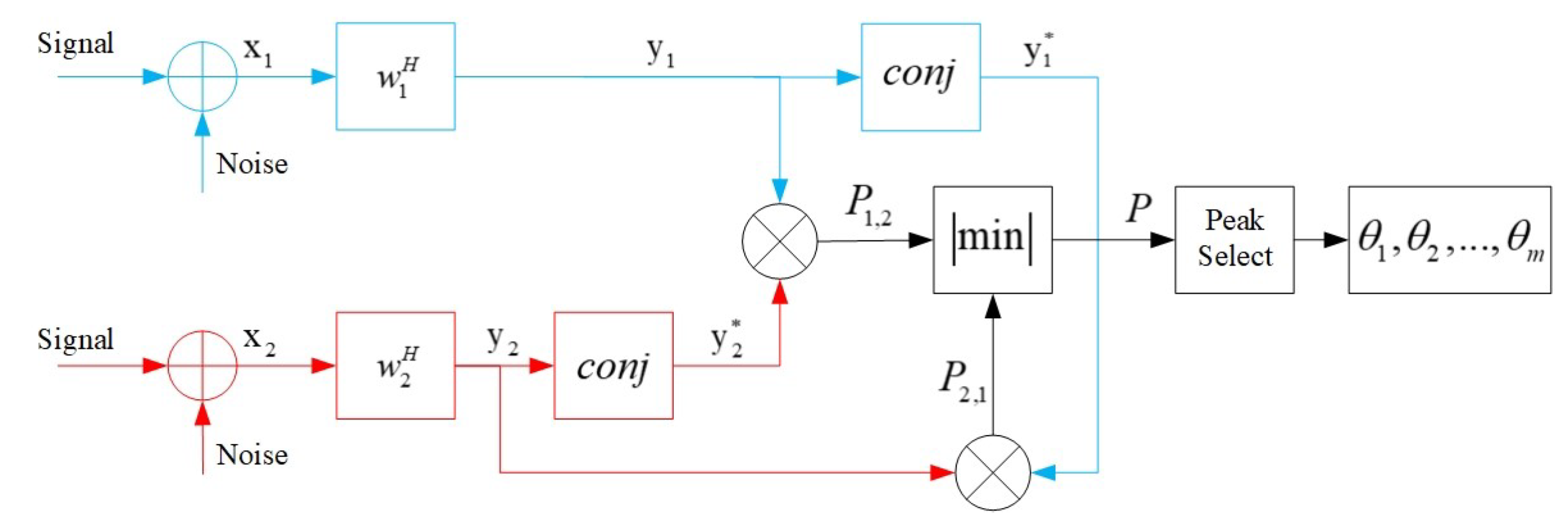
In beamforming processing flow, in order to receive the signals from direction
and suppress signals from other directions, a weight vector
is needed to make the main beam pointing to the direction of
. Then the weighted outputs of the two subarrays are
In Equation (
8),
is the weighted outputs of subarray one, and
is the weighted outputs of subarray two. When the ideal weight vectors
and
are fixed, the power
and
of the outputs in direction of
can be calculated:
In Equation (
9),
is the covariance matrix of
in size of
, and
is the covariance matrix of
in size of
. Because
and
are the weight vectors pointed to direction
, then Equation (
9) can be expressed as
For Equation (
10), in fact we do not know where the real
is, and we wish to estimate it. We can search within the range
in order to get the power spectrum:
In Equation (
11), the CBF takes
and
. Then the spatial power spectra of the two subarrays are obtained:
For Equation (
12), in real-world scenarios, the finite sample estimates of the array covariance matrix
and
are formed:
In Equation (
13),
p is the snapshot index,
and
are the finite discrete samples,
. Therefore, the spatial spectra of the two subarrays,
and
, can be obtained. However, due to the sparse spatial sampling, the spectra of the two subarrays are severely affected by grating lobes, which will influence the results of DOA estimation.
4. Simulation and Discussion
The parameters of CA are chosen first: The co-prime pair is
, and the extension factor is
. Thus, the sensor number of the two subarrays is
. The total number of sensors generated by the subarrays is
, and the sensor number of ULA with the same aperture is
. The resolution of a certain direction is directly related to the changing rate of the steering vector near the direction, which can be given in Equation (
28):
The Rayleigh Criterion for the ULA is . Assume that all the sensors are identical, reciprocal, and omnidirectional. The center frequency of signals is set at , and the sampling frequency is . The underwater sound velocity is , and the sensor spacings in subarrays are and , respectively. CBF is adopted, and the bearing range is .
4.1. Processing Method Simulation
Assume a scenario that far-field point targets are simulated. The rationality and correctness of the algorithm are verified by changing the parameters of targets. The amplitude threshold and the phase threshold are set at . The solid lines represent the true target directions, and the dotted lines represent the spurious peak directions.
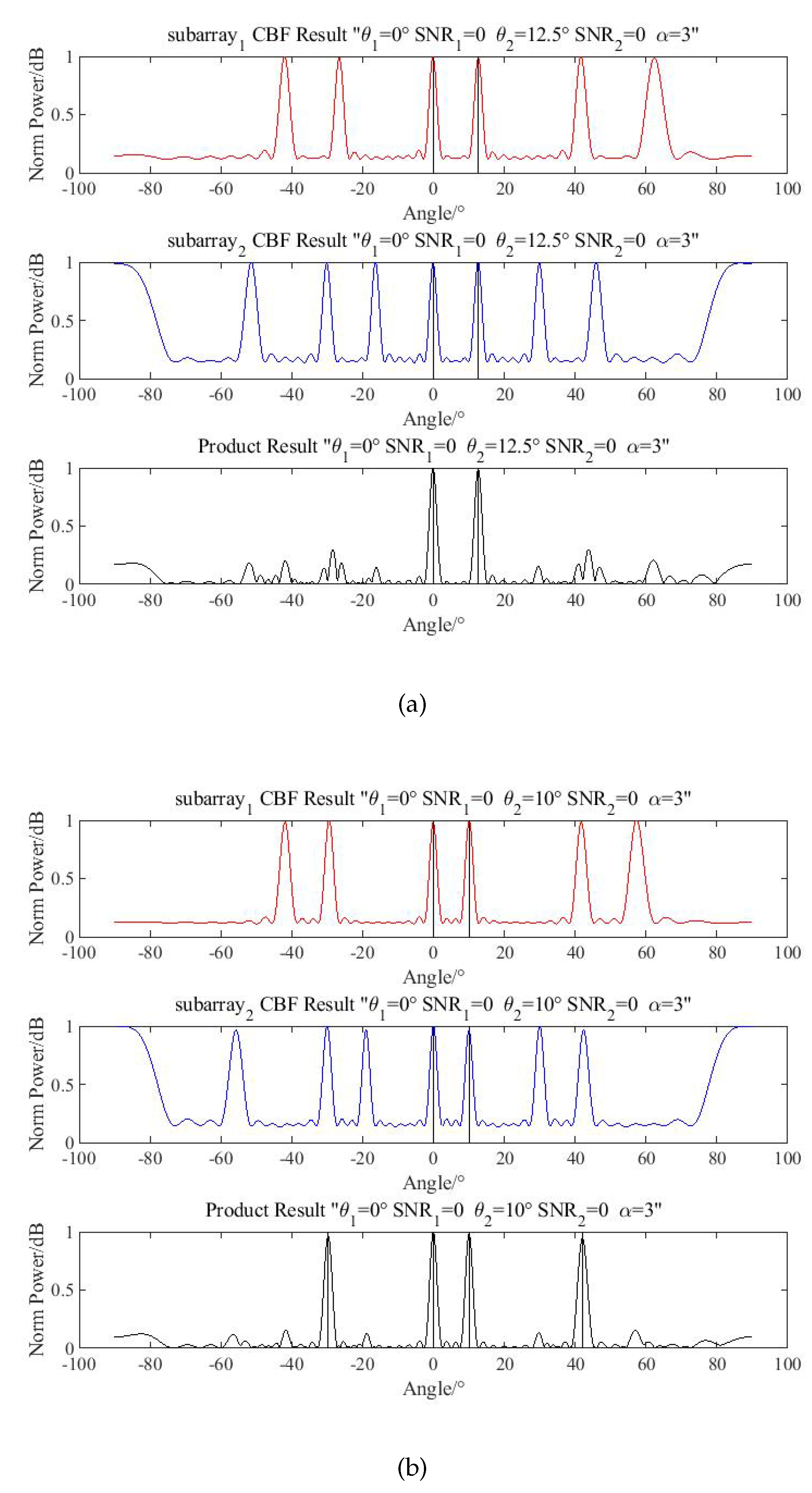
4.1.1. Product Processing
The directions of two targets are
. The SNR level is
, and the phases of targets are set randomly. The number of snapshots is 1000, and the simulation result is shown in
Figure 10a.
In this situation, the spurious peaks can be eliminated by product processing, but when the direction of targets changes to
, the spurious peaks cannot be eliminated, as is shown in
Figure 10b. Since the main beamwidth of the beamformer is about
, the second target is located out of the beam range.
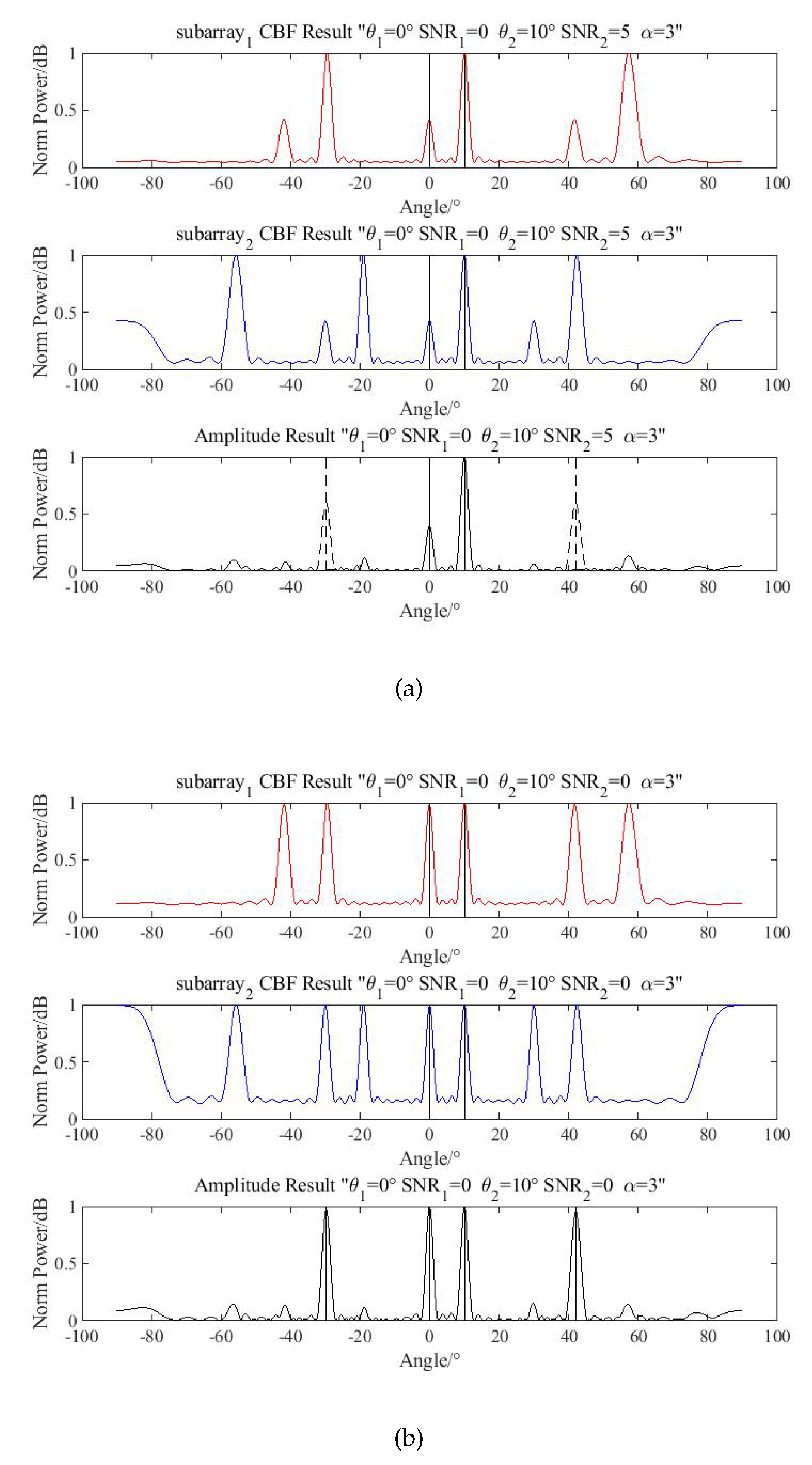
4.1.2. Amplitude Selection
The directions of two targets are
. The SNR level is
, and the phases of targets are set randomly. The number of snapshots is 1000, and the simulation result is shown in
Figure 11a.
In this situation, the spurious peaks cannot be distinguished by product processing. With the amplitude selection, the spurious peaks can be identified. However, when two targets have similar SNRs, for example when
, the amplitude selection is not as satisfactory, as is shown in
Figure 11b. Additionally, individual gain patterns make this even more difficult when the sensors are not directionless.
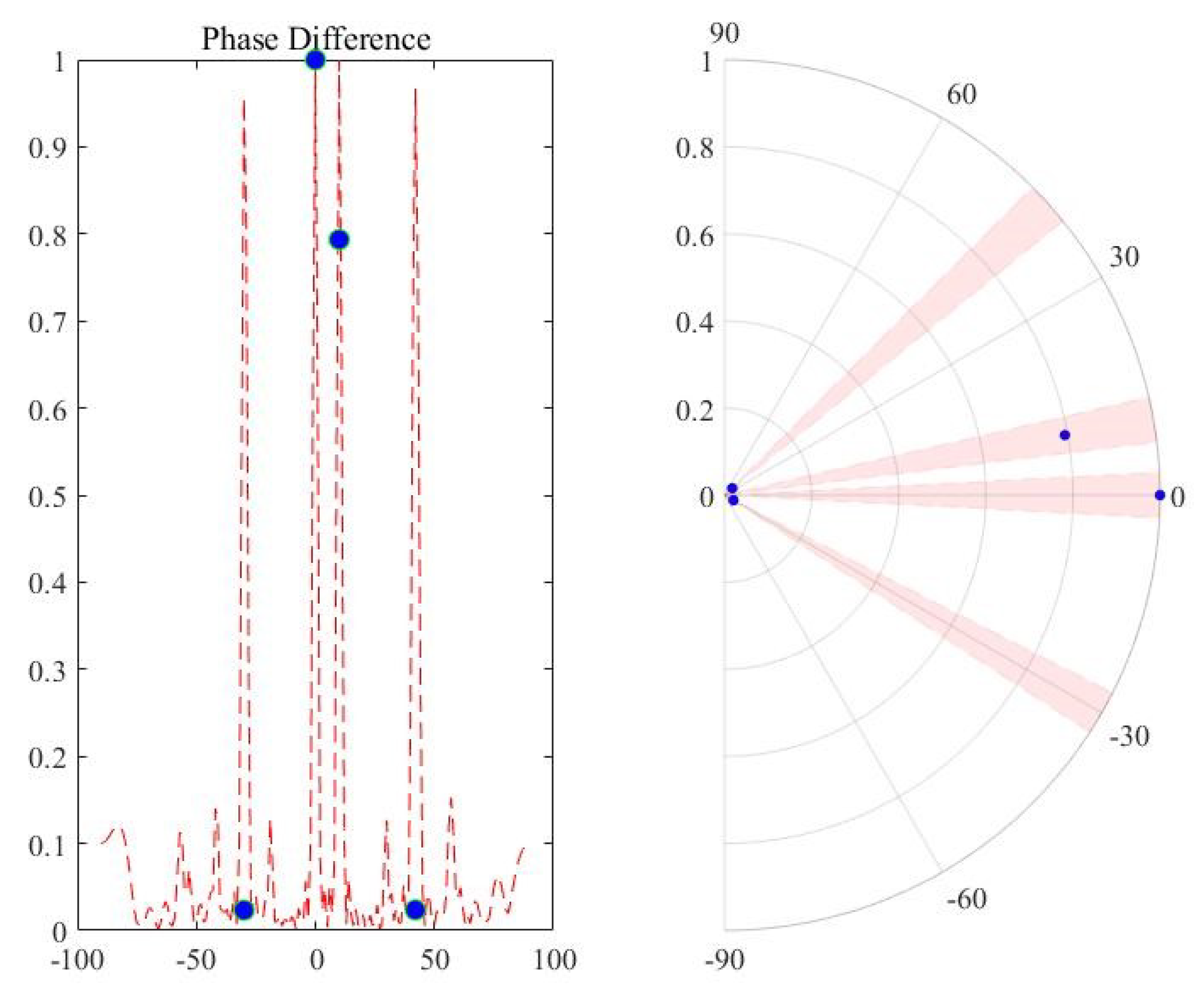
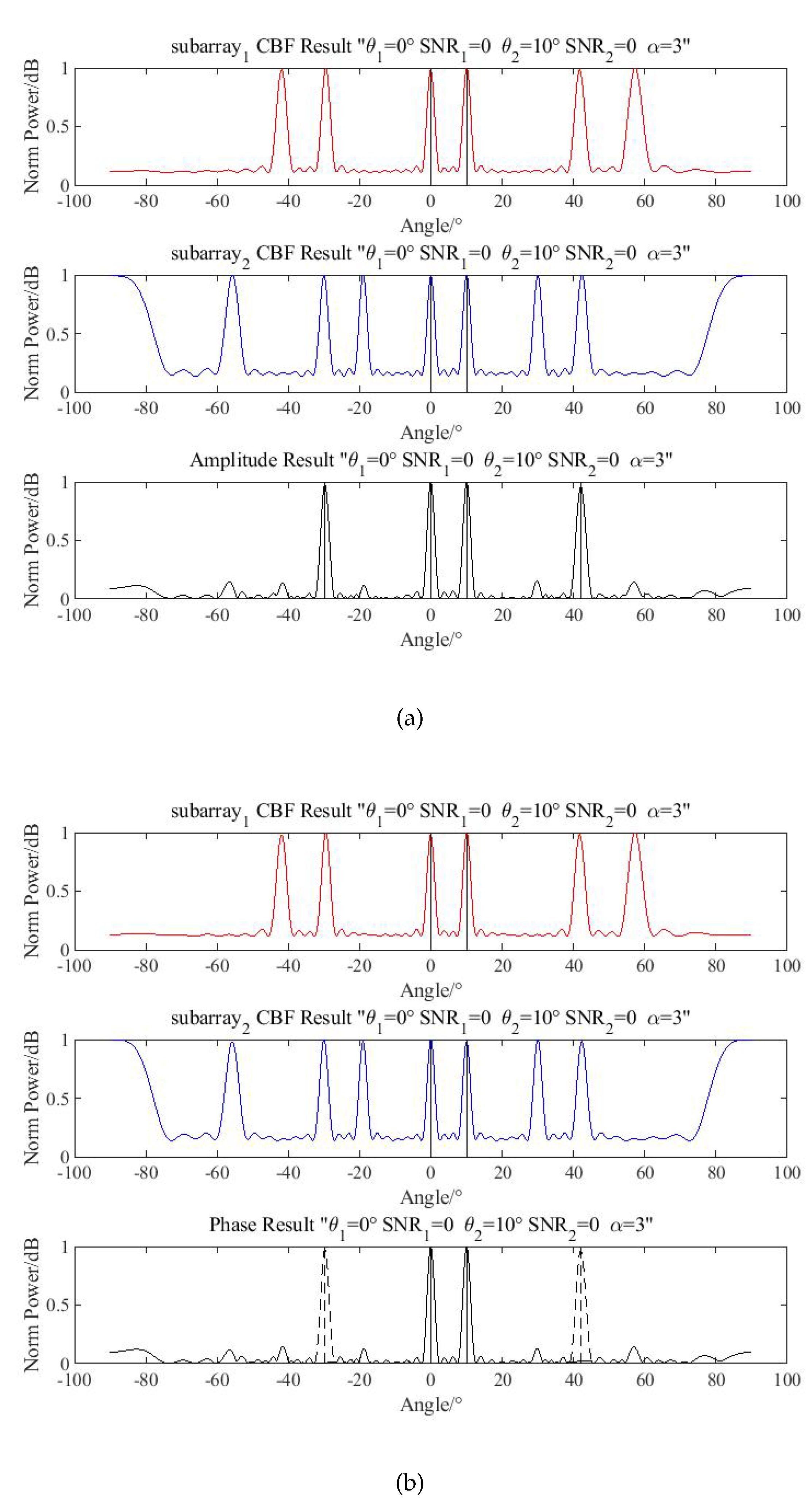
4.1.3. Phase Selection
The directions of two targets are
. The SNR level is
, and the phases of targets are set randomly. The number of snapshots is 1000, and the simulation result is shown in
Figure 12a.
In this situation, the spurious peaks cannot be distinguished by amplitude selection. With phase selection, the spurious peaks can be identified, as is shown in
Figure 12b. However, when a true signal overlaps with a spurious peak, or two signals overlap with each other, the processing does not work well enough. The resolution limit of the array is
, and the sources are in the same direction (within the main beam). The mainlobe interference elimination, blind source separation, and independent component analysis can be exploited to solve this problem in further work.
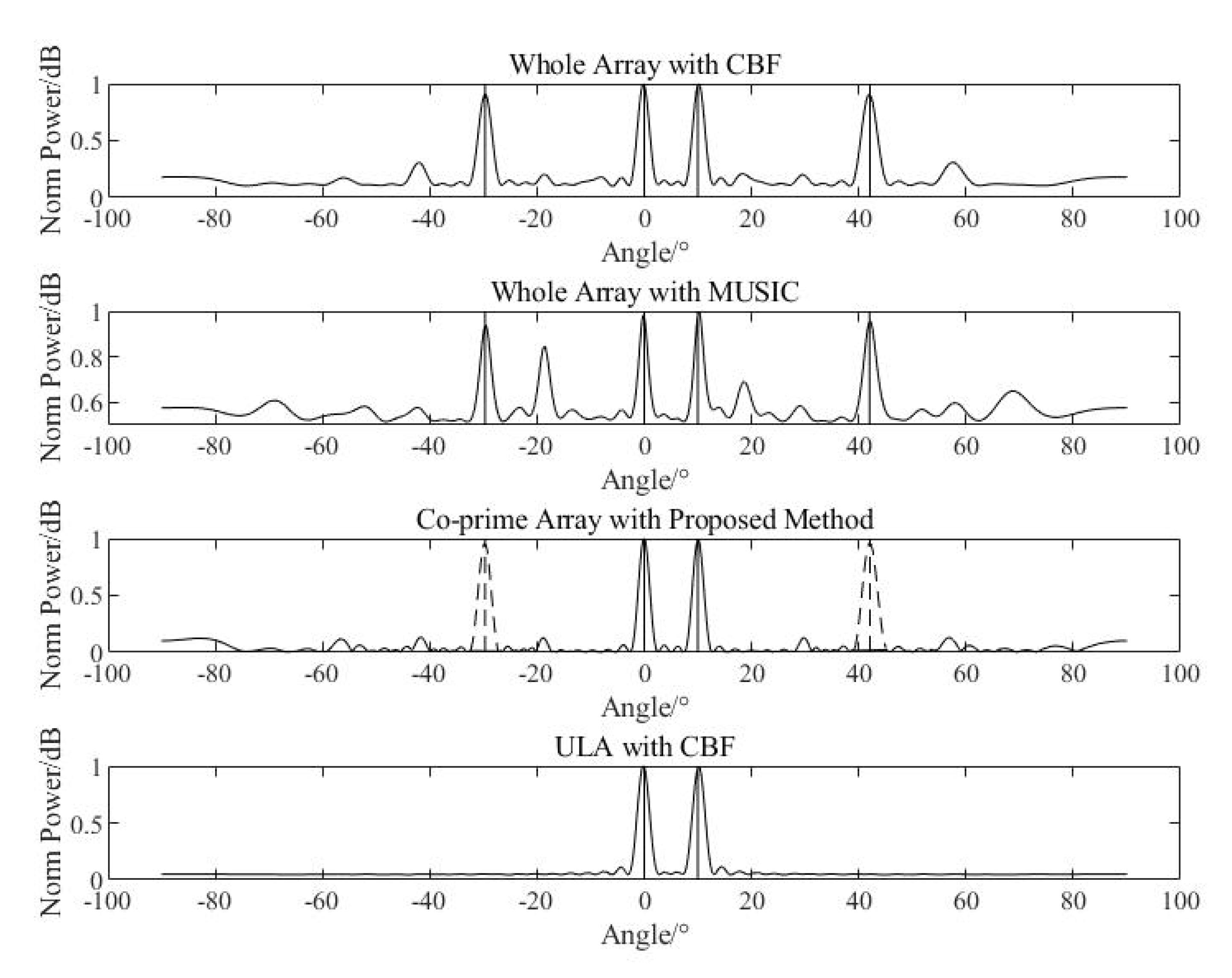
4.1.4. Comparison
After the processing flow is simulated, the spatial spectrum obtained by CBF of whole array, the spatial spectrum obtained by MUSIC of whole array, the proposed method with co-prime array in this paper, and the half-wavelength ULA with the same aperture are compared.
As is shown in
Figure 13, comparing with the CBF method applied to the whole array, the proposed method in this paper can effectively distinguish spurious peaks and accurately estimate the true direction of the targets. The MUISC algorithm is also applied to the whole array under the condition that the number of signals is known, and the spurious problem still exists, which is similar to the situation when CBF is applied to the whole array. Comparing with the half-wavelength ULA with same aperture, the spatial spectral peaks estimated by the proposed method are close to the width of the ULA results, which can meet the estimation requirements.
4.2. Probability of Success (PoS)
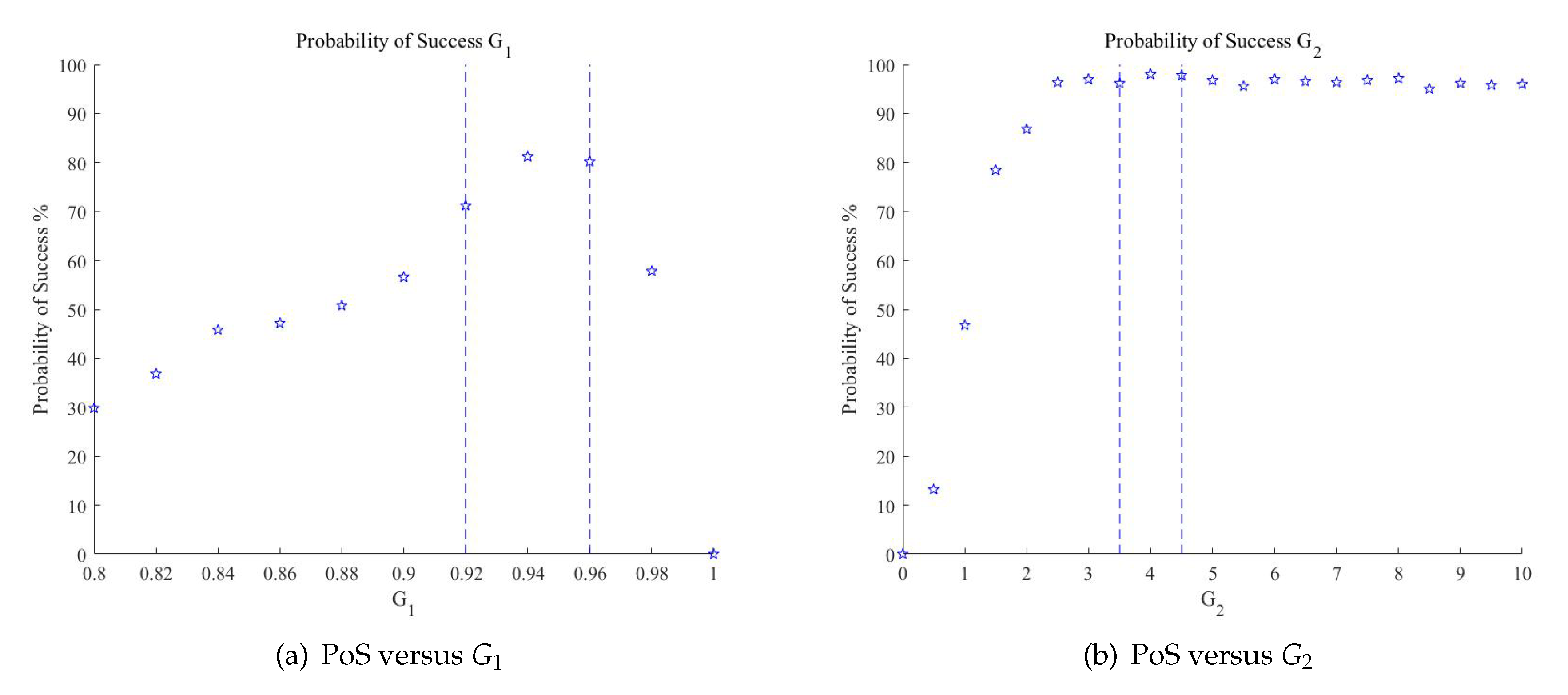
4.2.1. The Selection of Thresholds
The selection thresholds
and
are highly related to false alarms and underreporting, which has considerable influence on the PoS of the proposed method in this paper. Before discussing the PoS for the two targets case and the multiple targets case, the selection of thresholds should be simulated. As is stated in
Section 3, the amplitude threshold
is a little bit less than 1, and the phase threshold
is a little bit more than 0, theoretically.
The conditions of simulation remain unchanged, and the parameters of targets remain the same as in the last section. In the processing flow, the amplitude selection is achieved before the phase selection, and the relationship between PoS and
is simulated. The range of amplitude threshold
is adjusted from 0.8 to 1 with the interval 0.02. For each
, 500 Monte Carlo experiments were conducted, and the PoS versus
is obtained. As is shown in
Figure 14a, the PoS goes steadily up with the increase of
. The amplitude threshold
gradually eliminates the angle which is not qualified to it. When
, the PoS reaches the max with PoS = 81.2% and the value of
near
is recommended to be the amplitude threshold. In this range, the amplitude selection can guarantee at least PoS = 70%. Then, the PoS goes down until PoS = 0 when
. In this situation, the threshold is too high and approaches the ideal circumstance, which is not a good range for the selection of
.
After selection of the amplitude threshold
, the selection of phase threshold is simulated. The conditions of simulation remain unchanged, and the parameters of targets remain the same. The amplitude
is set at 0.95, as a reliable value from the simulation result. The range of phase threshold
is adjusted from 0 to 10 with the interval 0.5. For each
, 500 Monte Carlo experiments were conducted, and the PoS with the corresponding
is obtained. As is shown in
Figure 14b, the PoS increases sharply when
. When
is in the range of 3.5 to 4.5, the PoS reaches the top with PoS = 98%, and the values near here are recommended to be the phase threshold. Then, the PoS decreases slowly, for
has provided enough guarantee for the phase selection. The simulations are based on two targets here and in practice, and the two thresholds can be set artificially according to empirical experience or adaptive methods.
4.2.2. PoS for Two Targets
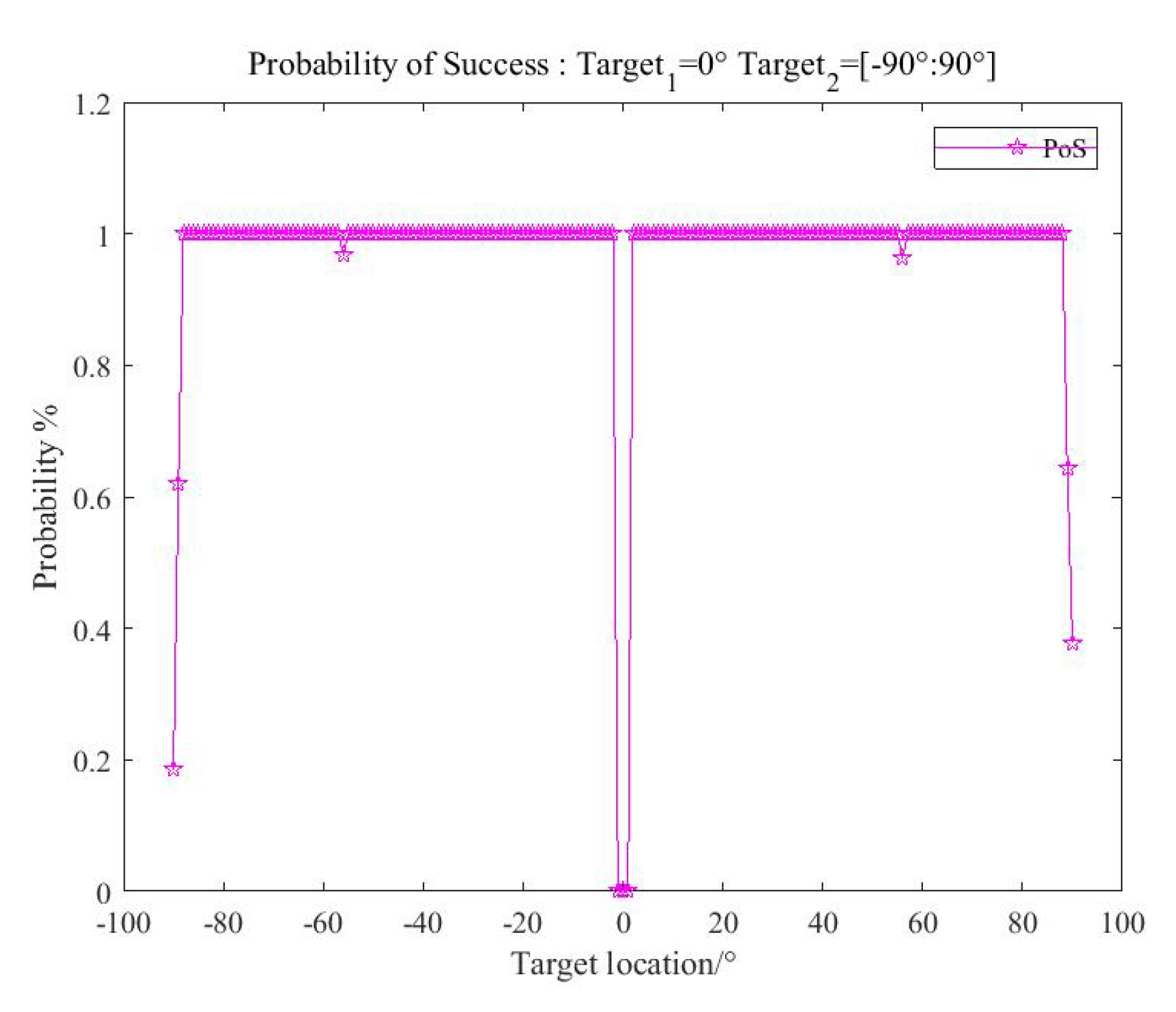
In order to verify the ambiguity elimination effect when the directions of targets change, the SNR level is fixed at . The direction of target one remains unchanged , and the direction of target two changes within the range . In each bearing, 1000 Monte Carlo experiments are conducted, and the PoS versus corresponding is obtained.
As is shown in
Figure 15, when target two is located in the direction of
, the PoS decreases significantly. This is caused by the overlap of the two signals, which has been discussed in
Section 3. When
, the end-fire direction of the array, the DOA ability of the array decreases obviously. While in most directions, the PoS remains stable with little fluctuation.
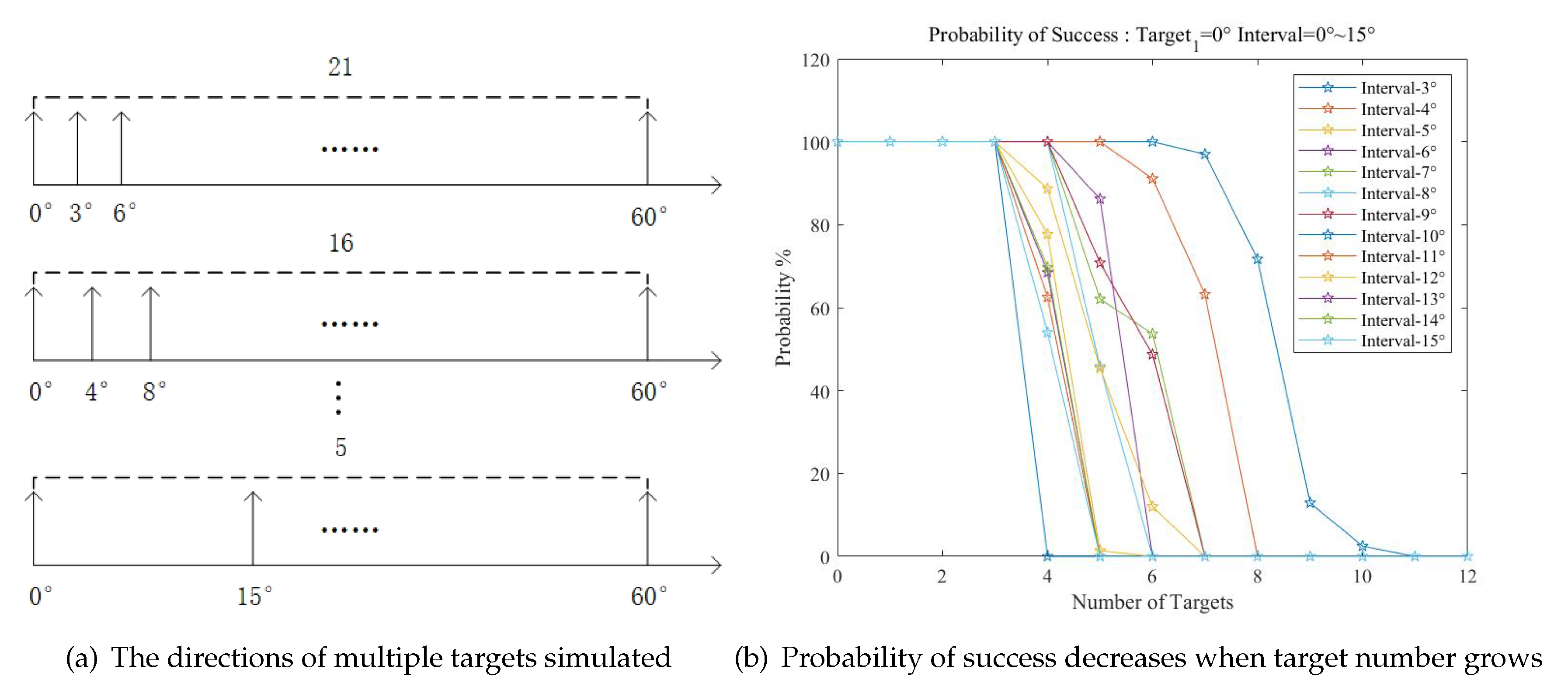
4.2.3. PoS for Multiple Targets
As is shown in
Section 3, when the number of targets increases, the number of spurious peaks will continue increase. The simulation of PoS versus the number of targets in a certain range is carried out. The SNR of targets are fixed between 0 dB and 3 dB. The direction of target one remains unchanged at
, and the direction of other targets changes with different angle intervals from
to
, as is shown in
Figure 16a. In each case, 1000 Monte Carlo experiments were conducted, and the PoS was obtained.
As is shown in
Figure 16b, when the interval of targets is
, the PoS remains stable near 100% with the number of targets under 8. However, as the number of targets increases, the PoS decreases, and when the number of targets reaches 11 the method becomes invalid. This is because when more targets appear, the component of spurious peaks becomes more complex. When the amplitude and phase information extracted from this spurious peak are similar to that of true targets, the existence of targets cannot be evaluated, i.e., the spurious peak will be identified as a true peak. When the spurious peak and the true peak overlap in the same direction, the true peak would also be identified as a spurious peak. When the interval of targets increases, the number of identifiable targets decreases. Therefore, the method proposed in this paper has better performance in scenarios with fewer targets. When the scenarios become complicated, it is recommended to apply and combine more methods like independent component analysis to accomplish the estimation.
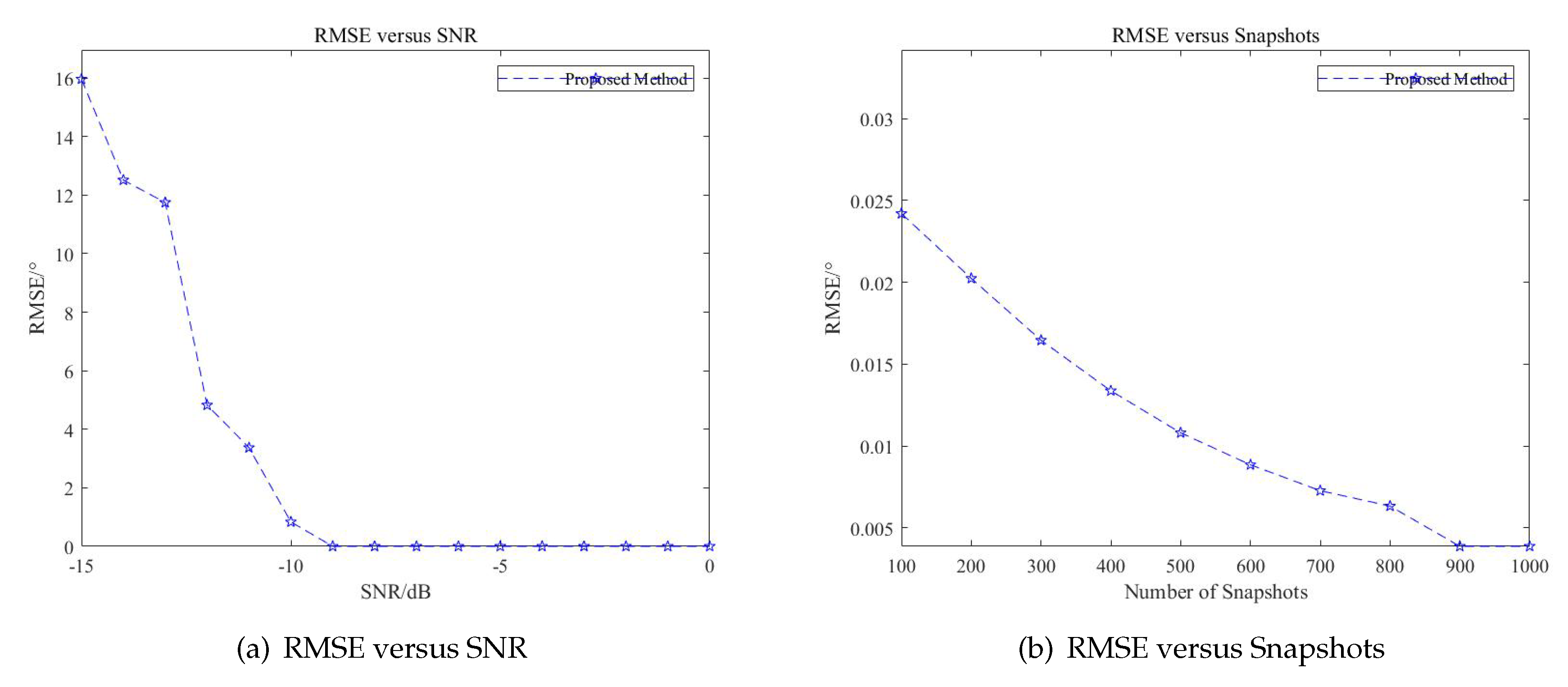
4.3. Statistical Performance Analysis
The root-mean-square error (RMSE) of the method proposed in this paper versus SNR and the number of snapshots are next investigated over 1000 independent Monte Carlo simulations. The RMSE of DOA estimation is calculated as
In Equation (
29),
is the number of Monte Carlo simulations,
,
K is the number of sources,
is the
kth real direction of the signal, and
is the estimated direction of the
kth source in the
th Monte Carlo simulation,
.
The directions of targets are fixed at
. The number of snapshots is 1000, and the SNR level is adjusted from −15 dB to 0 dB. The thresholds are set at
. The RMSE versus SNR with the proposed method is shown in
Figure 17a. The RMSE appears to decrease gradually as the SNR of the signals increases. When the SNR level is low, the presence of the noise seriously affects the accuracy of DOA estimation. When the SNR level is sufficiently high, the method proposed in this paper presents the similar accuracy with little RMSE. When the SNR level reaches −9 dB, the RMSE remains at 0.
The RMSE versus snapshots is then simulated. The SNR level of targets is fixed at 0 dB, i.e.,
, and the number of snapshots is adjusted from 100 to 1000. As is shown in
Figure 17, when the number of snapshots increases, the RMSE descends gradually. When there are sufficient snapshots, the RMSE remains stable near 0. However, compared to the RMSE versus SNR level, RMSE versus snapshots has less influence on the proposed method. From the statistical performance analysis simulation, the proposed method can guarantee the DOA estimation performance under sufficient SNR and achieve similar performance with insufficient snapshots.
4.4. Prospects For Future Work
The method in this paper is proposed to solve the problem of grating lobes because of the sparse spatial sampling in passive sensing applications. In practical sonar system applications, how to quickly eliminate ambiguity is a practical problem. Strong demand for wide-band signal processing and vector hydrophone array processing with sparse arrays under random interferences still exists. In this paper, the reduction of mutual coupling and relevant material effect are qualitatively discussed, which can be verified with more experiments. The threshold selection in different cases depends on the parameter setting, and the rules will be further studied.
5. Conclusions
CAs are gradually applied in underwater scenarios because they have significant advantages over traditional ULAs. For the same sensor number, CAs provide better accuracy and higher resolution. While for the same aperture, CAs can reduce the physical cost. Because of the expansion of inter-spacing, the mutual coupling can be reduced. Despite the advantages of CAs, the spatial spectra obtained directly from CBF can be degraded by grating lobes due to the sparse spatial sampling in passive sensing applications, which will seriously deteriorate the estimation performance. Therefore, the ambiguity elimination based on CAs is worthy of study. The ambiguity elimination in this paper is solved taking advantage of the co-prime property of subarrays in CAs. The amplitude and phase information of beam-domain outputs are exploited based on this idea.
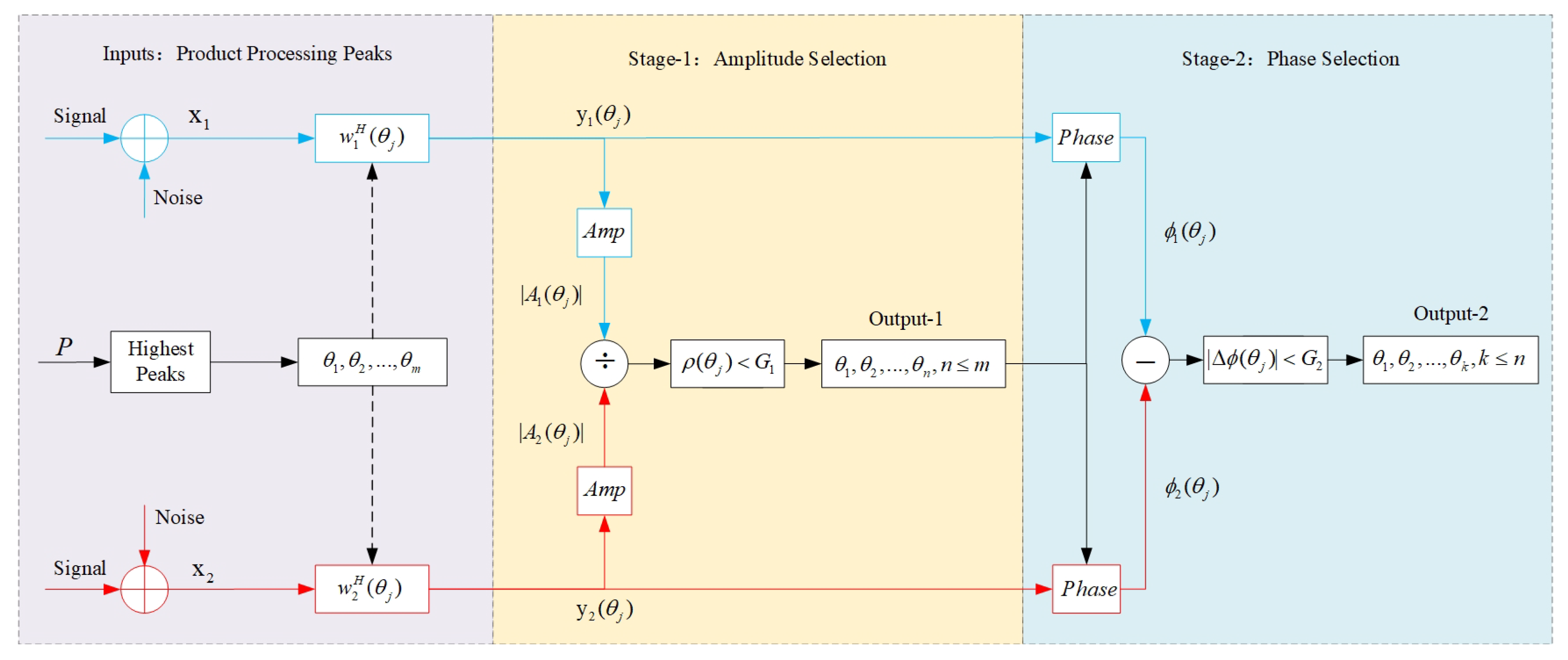
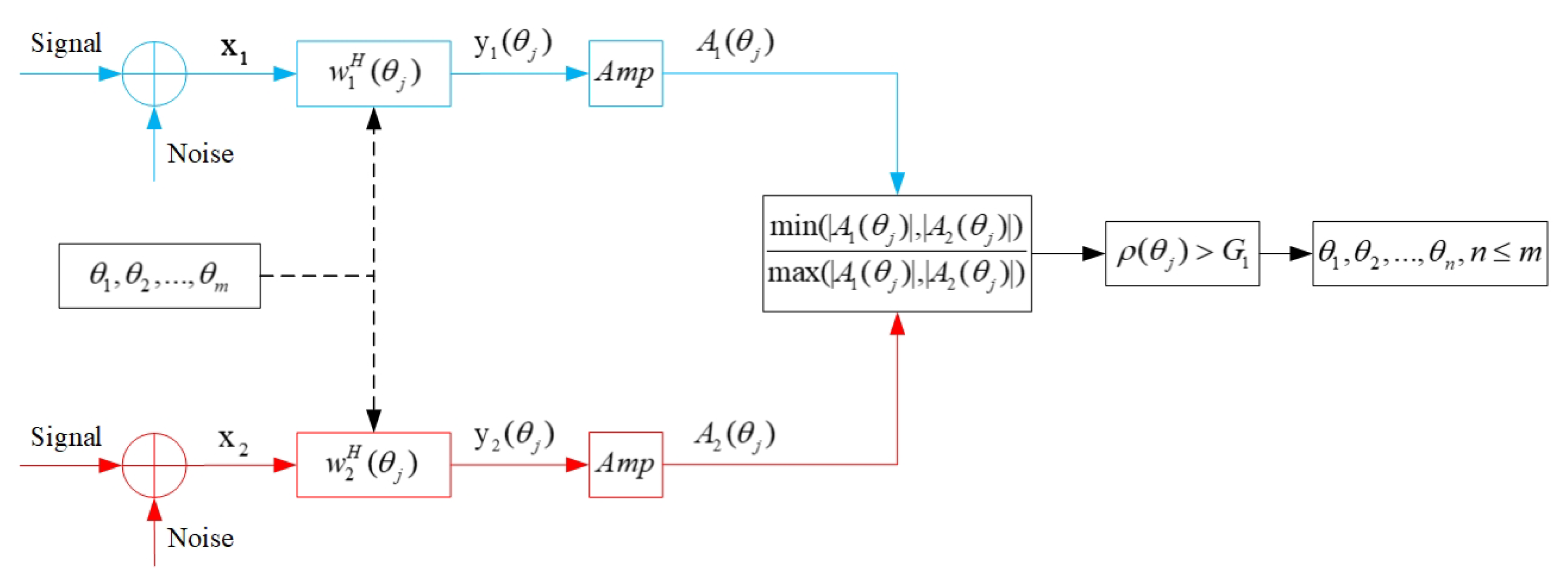
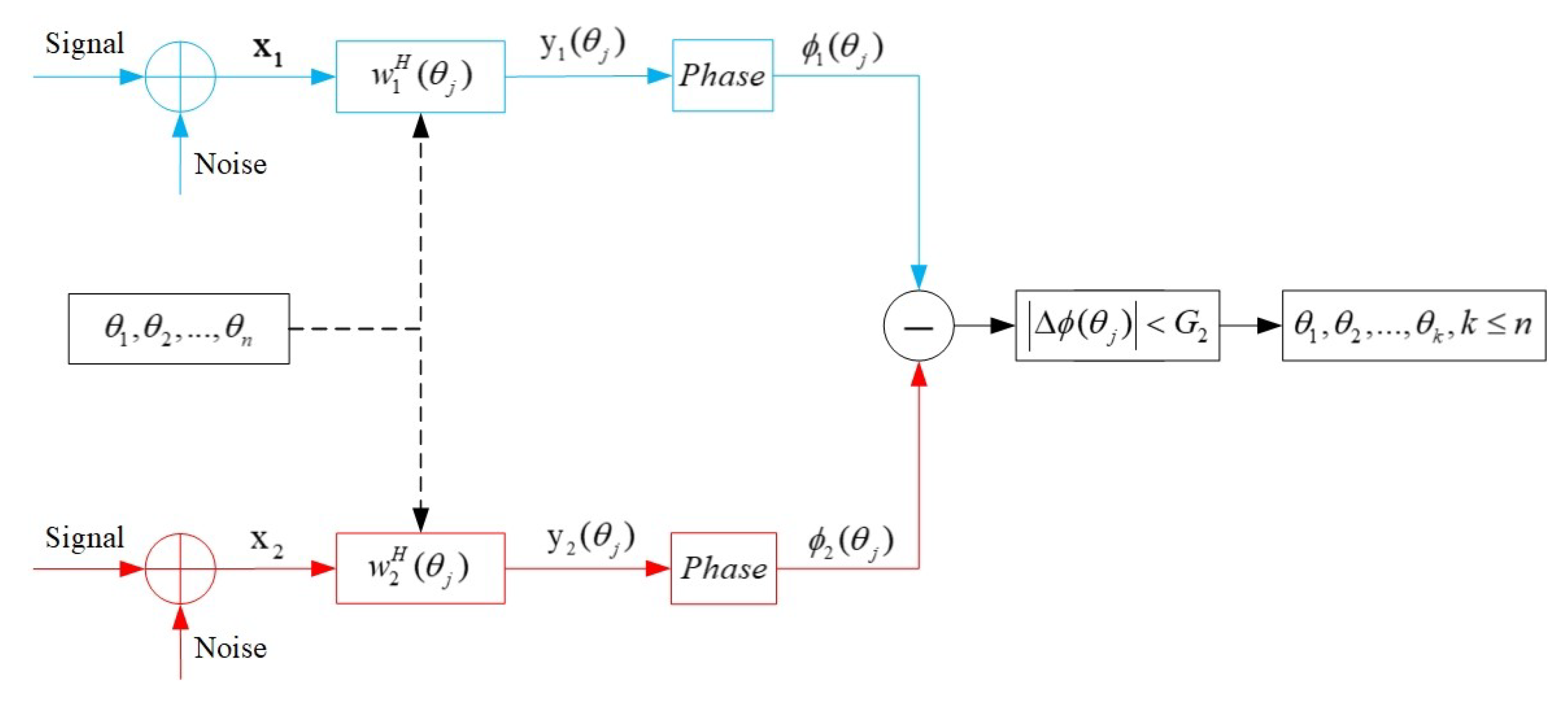
The method proposed in this paper is applied to the CA as a pretreatment before the high-resolution DOA estimation algorithms like MUSIC, etc. In the processing flow, the subarray CBF is firstly utilized to obtain the initial direction set. Then, the beam-domain outputs of subarrays in each bearing are conjugated and multiplied to obtain the peaks of the correlation spectrum. On the basis of this, the amplitude information from two subarrays is exploited to further discriminate the spurious peaks with the amplitude threshold. After the amplitude selection, the phase information is exploited to identify spurious peaks that are not distinguished by the amplitude selection. Finally, all the spurious peaks in the spatial spectrum can be identified, and the ambiguity is eliminated.
Simulation results validated the effectiveness of the proposed method in this paper. The selection of the threshold is discussed, and the recommended values are given. The statistical performance analysis of the proposed method is studied and proofed to guarantee the performance. To summarize, the method with CA utilizes fewer sensors to estimate the DOA accurately and can eliminate the ambiguity caused by at least three targets. When the angle range of interest is given, this method performs better. In practical scenarios like underwater applications, the proposed method has great practical significance. It can effectively promote the related array signal processing algorithm in reality, save costs, and is easy to implement.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}