1. Introduction
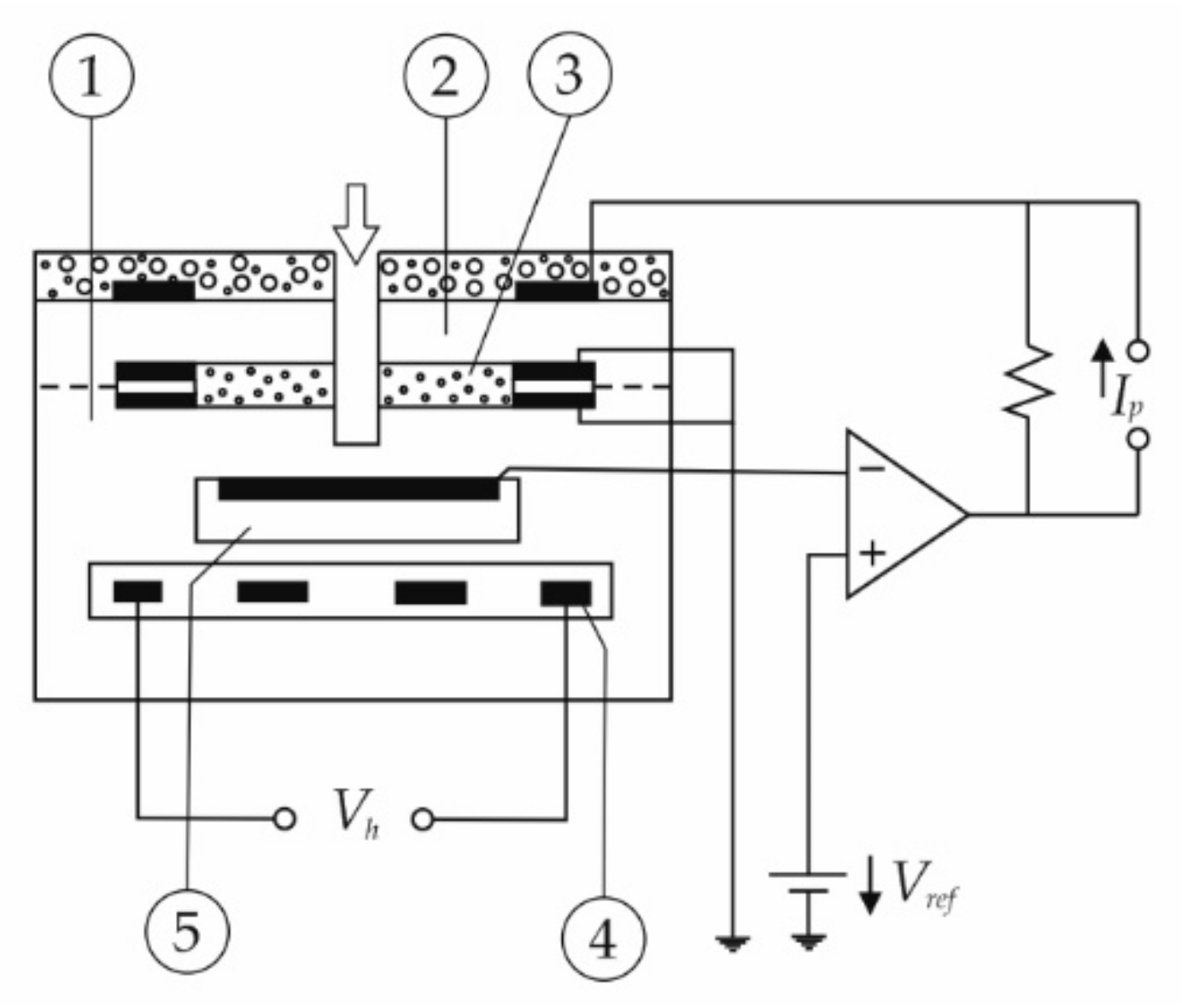
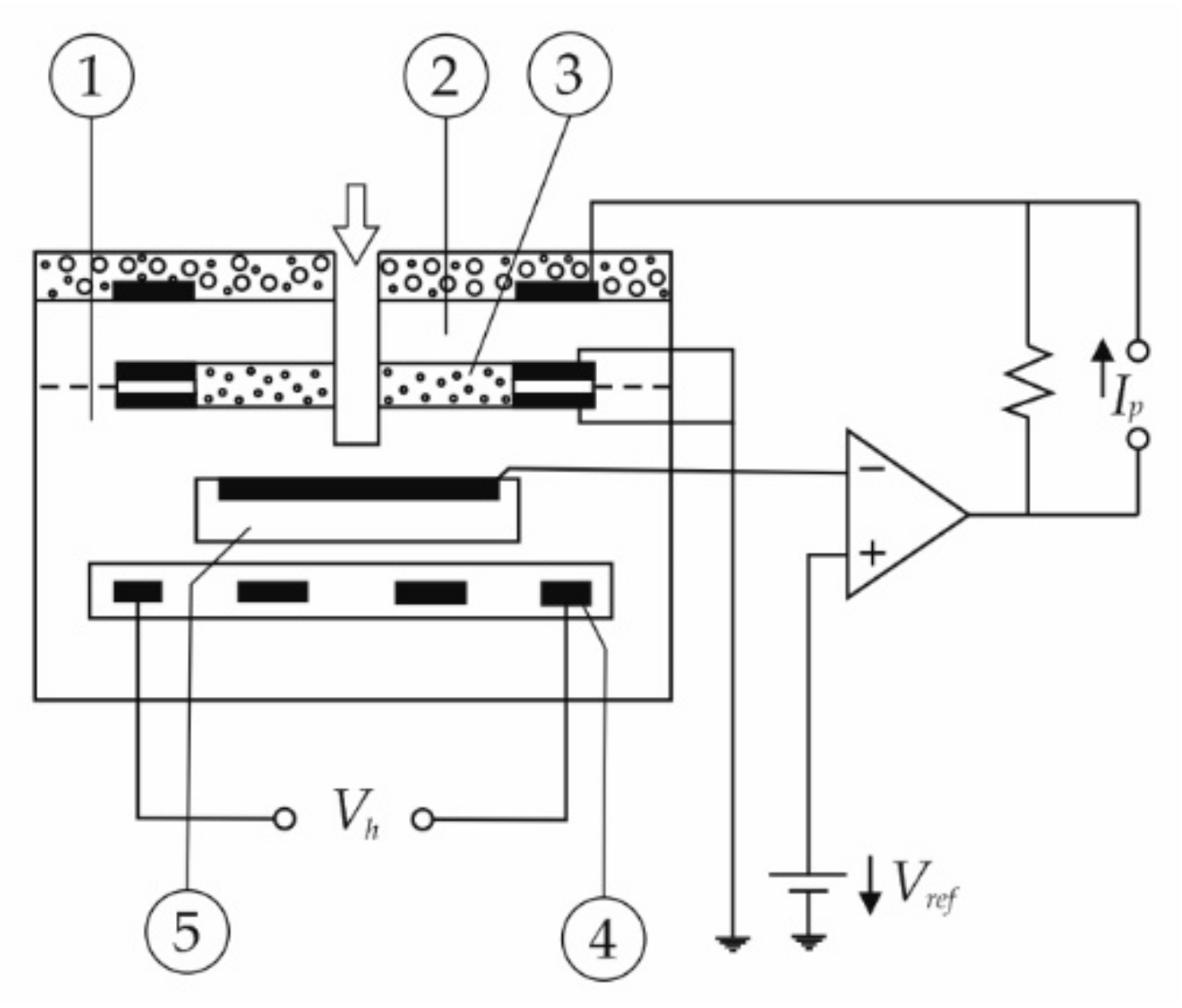
The development of a wideband universal exhaust gas oxygen (UEGO) sensor has extended the conventional application of excess air ratio (λ) signal in engine performance and emission control. The measurement principle is based on the diffusion of gasses between the so-called reference cell and pump cell governed by the yttrium-stabilized zirconia (YSZ) O
2−-conductive membrane [
1]. In general terms, this diffusion rate and direction are sensitive to exhaust gas composition; hence, wideband sensors—unlike their discrete-state predecessors—enable the measurement of λ in the whole applicable range and with fast response.
Owing to their characteristics, combined with high rigidity and stability in corrosive environments, UEGO sensors are now used as a standard control feature for spark ignition engines. In the stoichiometric combustion concept, the main benefit of λ control comes through improved conversion for a three-way catalytic converter [
2]. At the same time, the other downstream sensor provides catalytic converter diagnostic and regeneration functionalities [
2]. In 2001, Delphi (Delphi Technologies Ltd., London, UK) introduced a production-feasible, wide-range λ control system for gasoline direct injection engines that was based on the wideband UEGO sensor technology [
3]. This enabled strict NO
X emission limits with reduced calibration burden under lean combustion conditions. Currently, wideband UEGO sensors are also used in diesel engines to help reduce engine-out emissions. The λ signal is used as an input for the fuel mass observer [
2], as well as to run the engine in the low-emission area of the map and enable smokeless acceleration. Furthermore, in lean-burn marine gas engines, the absolute λ signal can be used for virtual knock estimation. This wide spectrum of UEGO sensor applications is complemented by virtual λ-based fuel composition sensing for gasoline-ethanol [
4] or diesel–FAME (fatty acid methyl ester) [
5] flex-fuel engines.
Putting the engine type aside, more recent λ measurement applications focus on individual cylinder control [
6,
7]. In such applications, the market-available sensors pose some problems related to feedback response delay. These problems can be overcome by the application of ion sensing at individual cylinders [
8]. This real-time λ determination method ensures sufficient accuracy (errors typically do not exceed 3%) [
9], while the use of the same hardware offers the additional advantage of combustion timing determination [
10]. For UEGO sensors, the relatively long feedback delay problem is usually solved by various adaptive compensation algorithms incorporating Smith predictors [
11,
12] or other feed-forward/feed-back systems [
13]. Furthermore, individual cylinder λ control can be realized with a single UEGO sensor located at the common exhaust runner, while signal delay is dealt with by means of simplified gas transport and mixing models [
14]. Finally, it should be noted that completely virtual λ estimation techniques are explored, too [
15,
16]. These are usually based on fast-running mean value air-path models, which makes them potentially suitable for relatively simple engine layouts without exhaust gas recirculation (EGR), where pulsations dynamics can be neglected.
Still, the robustness and low production costs put the UEGO sensors in the mainstream of on-board λ sensing technologies. However, the aforementioned developments in λ-based control pose additional challenges for sensor accuracy, especially when non-standard test conditions are concerned. The type of fuel may affect oxygen sensor readings. The effect is straightforward for oxygenated fuels and enables on-board FAME admixture estimation [
5]. The Bosch (Robert Bosch GmbH, Stuttgart, Germany) R&D group reported significant differences between the readings of their sensors for gasoline and ethanol [
4]. On the other hand, Irimescu [
17] used the above fuels and observed only minor differences solely in highly lean or highly rich mixture conditions and elevated pressures. Finally, Grannell et al. [
18] explained the significant delta in the sensor readings for gasoline and ammonia (NH
3) combustion by attributing it to the oxidation of unburned NH
3 on the sensor surface.
The above partially conflicting reports may result from the employment of different sensor technologies or different thermodynamic conditions of measurements. On the hardware side, the sensors usually differ in the reference pumping current definition that is either adjusted to ambient air (e.g., LSU 4.2 sensor by Bosch) or selected arbitrarily (e.g., LSU 4.9 sensor by Bosch) [
17]. As far as test conditions are concerned, the diffusion-based operating principle makes sensors very sensitive to the exhaust backpressure [
17]. While this is typically not an issue for λ measurement in conventional spark ignition or diesel engine applications, the cylinder-individual estimation methods usually rely on upstream sensor mounting that is subjected to significant pressure fluctuations. These may arise from cycle-to-cycle pulsations in the manifold or, on a longer-time basis, from (operating) point-to-point differences in pre-turbine pressure. Some UEGO sensors available on the market are already equipped with additional exhaust pressure measurement channels and corresponding compensation algorithms [
19,
20]. However, the nature of these correlations is either not revealed or revealed in a relatively simple form, without taking account of additional aspects such as signal delay or compositional and thermal effects. Regarding the thermal sensitivity of sensor signal, this aspect is important during engine start-up and fast transients. Some fundamental insight into the issue can be found in the work by Harris and Collings [
1].
Concluding the above literature review, it should be noted that although the technology has been available on the market for some time, new developments in control put additional constraints on the UEGO sensor signal quality. Consequently, most research in the field focuses on understanding the cross-linking effects of various parameters under non-standard sensor application conditions. The present work fills the knowledge gap in this research by identifying the mechanisms of wideband UEGO sensor signal compensation under heavily lean conditions, high overall fuel dilution rates (heavy external EGR), and excessive exhaust backpressures. The new model is proposed that correlates the ambient-level UEGO signal with exhaust backpressure to provide accurate lambda estimation for a wide range of mixture strengths typical for contemporary lean-burn combustion engines. This correlation is validated under steady-state conditions using the reference λ value calculated from the carbon balance method. The new model surpasses the earlier-proposed UEGO signal pressure compensations in terms of the range of applicability while providing satisfying accuracy across all tested operating conditions. The work is considered instrumental for prospective cylinder-individual λ control strategies.
3. Methods
3.1. Test Stand
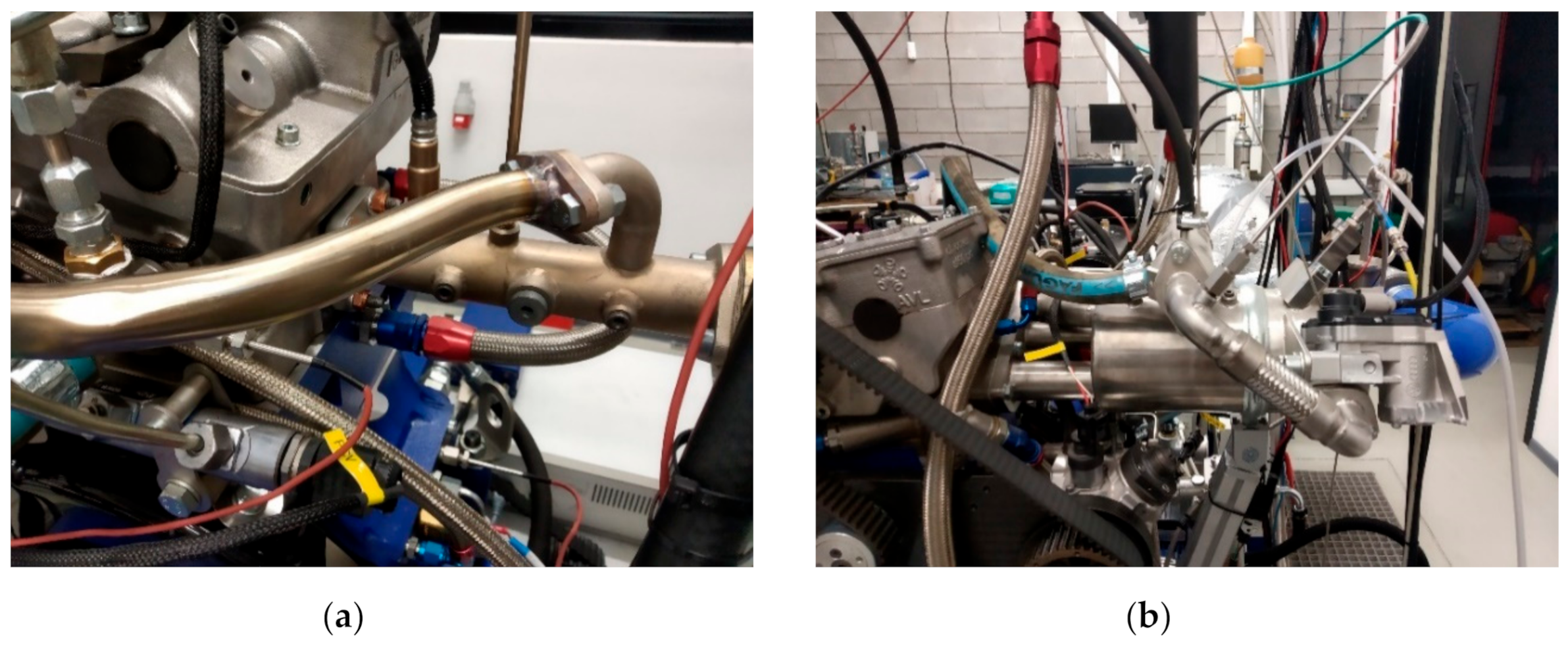
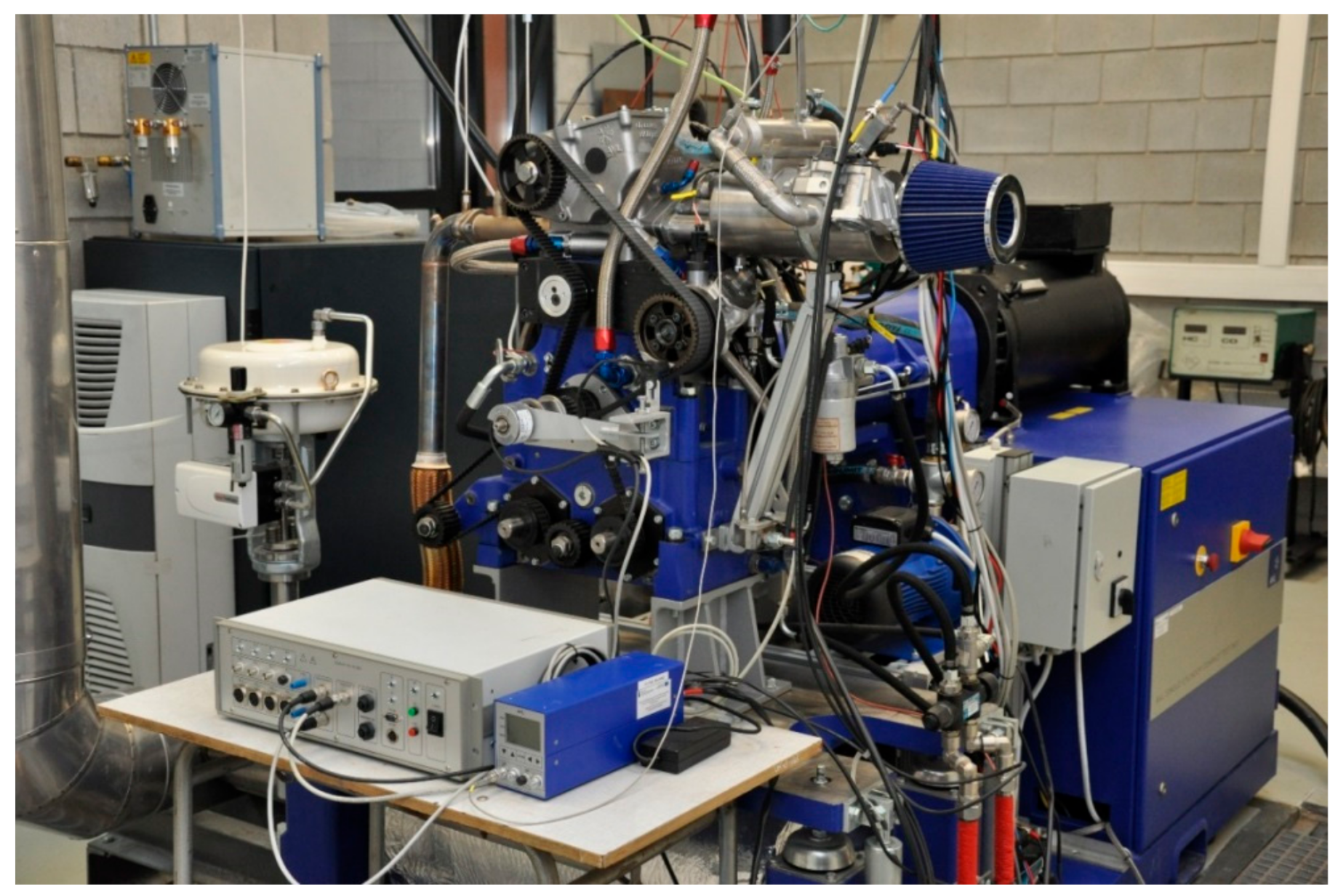
The experiments were performed using a single-cylinder research engine type 5402 CRDI by AVL (AVL List GmbH, Graz, Austria). To enable the simulation of engine operation under normal service conditions, the engine was coupled with the AC dynamometer with advanced automatic control. The use of the single-cylinder engine provided high exhaust pulsations that occur when the cylinder-individual λ control is applied.
Detailed specifications of the test engine are given in
Table 1.
For the purpose of this study, it suffices to mention that the test platform had a compression ignition-based combustion system with a toroidal in-piston combustion chamber coupled with a seven-hole electromagnetic injector representing the state-of-the-art light-duty automotive diesel engine.
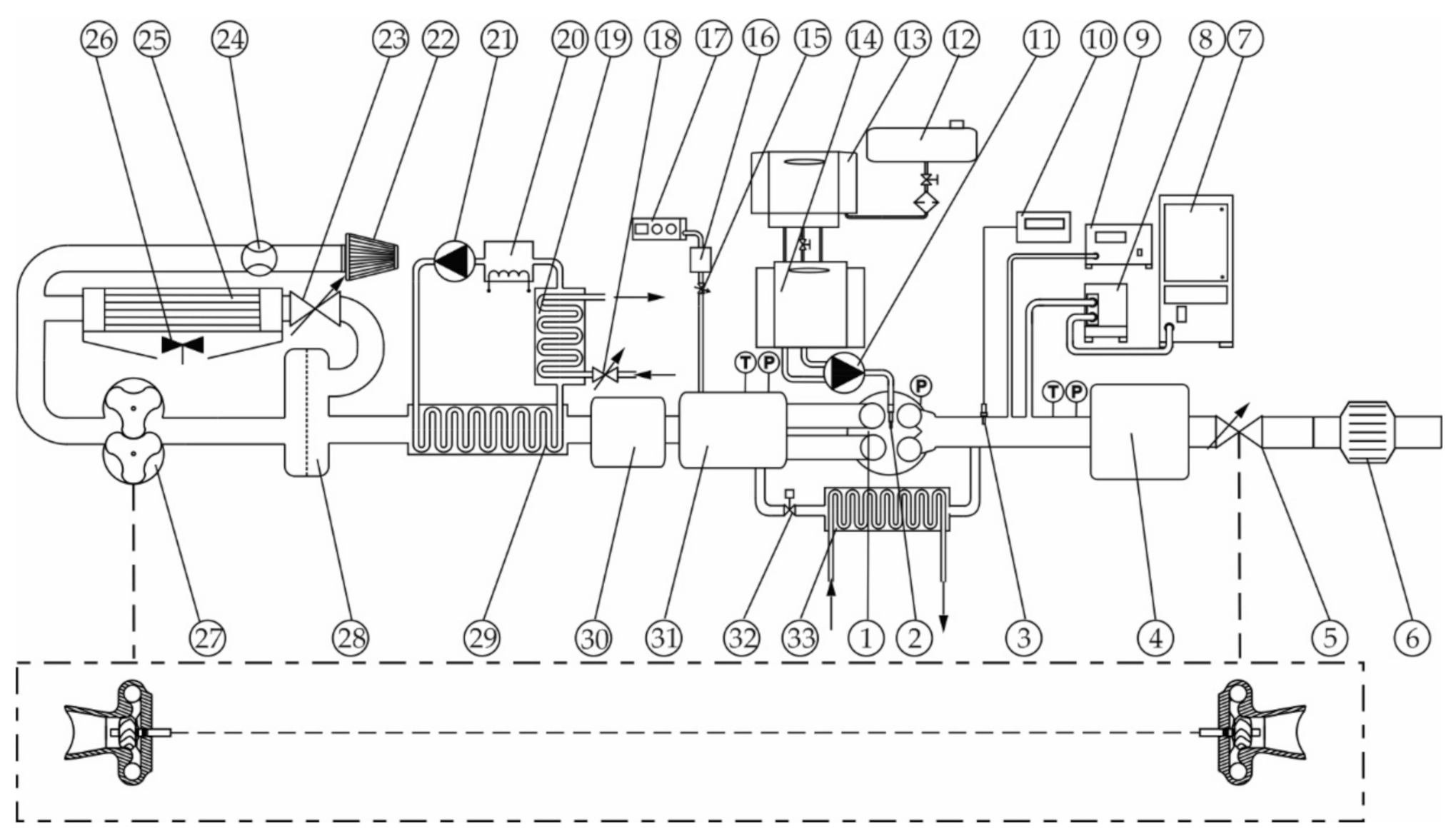
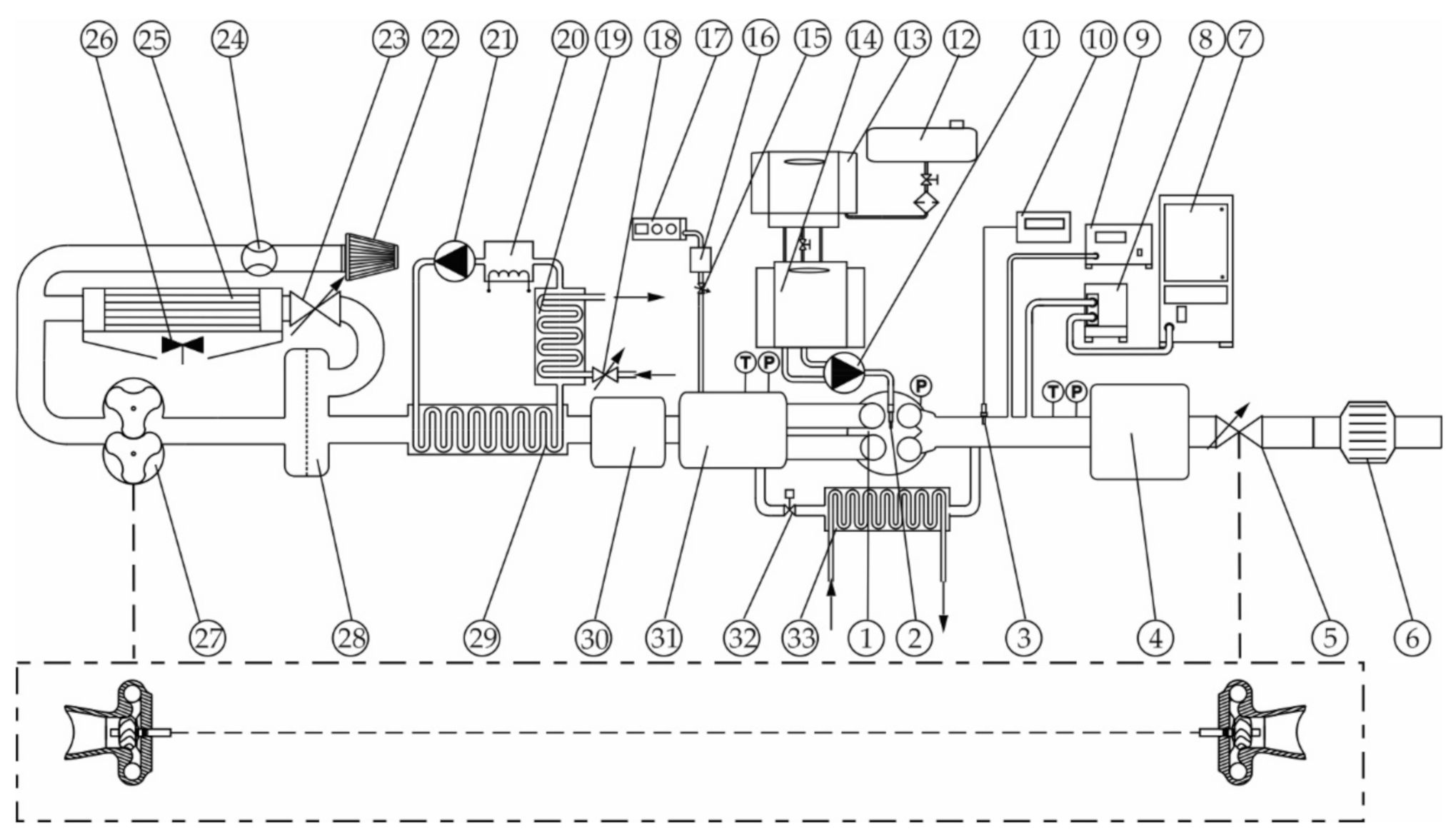
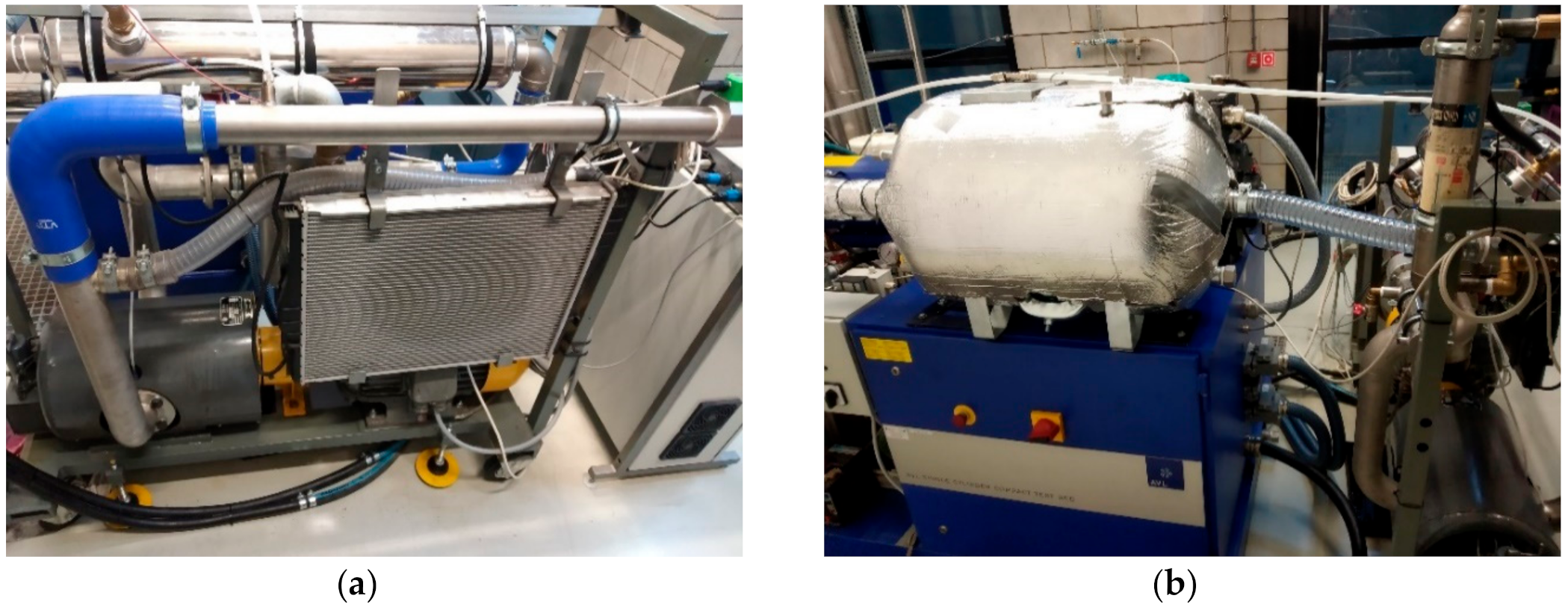
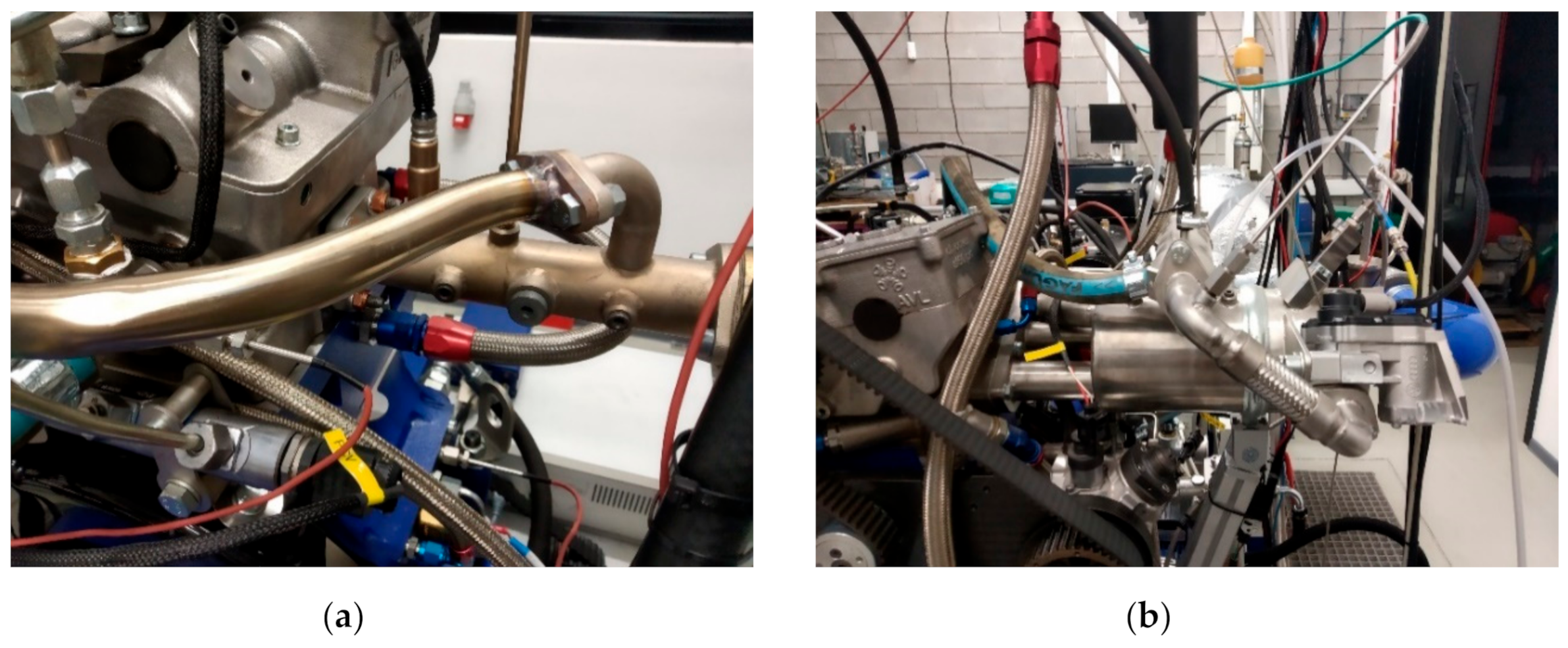
Injection parameters were managed by a fully opened engine control unit, ETAS INCA. During the experiments, the engine was operated as both naturally aspirated and supercharged in order to enable a high range of excess air at variable exhaust EGR rates. The cooled external EGR delivery rate was controlled via a proportional valve. A mechanical roots compressor driven by an electric motor was used to ensure flexible control of boost pressure. For achieving high EGR rates at boost conditions, an exhaust backpressure valve was installed downstream of the exhaust plenum. All components of the air-path system used in the experiments are shown in
Figure 3.
The wideband UEGO sensor used for providing the apparent λ signal (λapp) was a Bosch LSU 4.2 connected to the ETAS (ETAS GmbH, Stuttgart, Germany) LA4 lambda meter. The sensor was installed in a straight exhaust runner, approximately 200 mm away from the exhaust valves. The reference λ value was determined with the use of the AVL (AVL List GmbH, Graz, Austria) SESAM FTIR (Fourier Transform Infrared) multi-component gas analytical system. Additionally, the Pierburg–Hermann (Hermann Electronic, Fürth, Germany) HGA400 gas analyzer was used to measure the intake CO2 concentration and thus to provide estimation of the EGR rate.
The engine test stand was equipped with all other measurement devices required for completion of the planned tests. Among others, the measurement system consisted of an intake air thermal mass flow meter, a precision fuel balance with thermal conditioning, and a set of pressure and temperature transducers for measuring intake and exhaust thermodynamic conditions. The intake air temperature as well as the cooling agent and lube oil temperatures were controlled via separate thermal management systems. Further details of the experimental apparatus are provided in
Appendix A.
3.2. Experimental Procedure
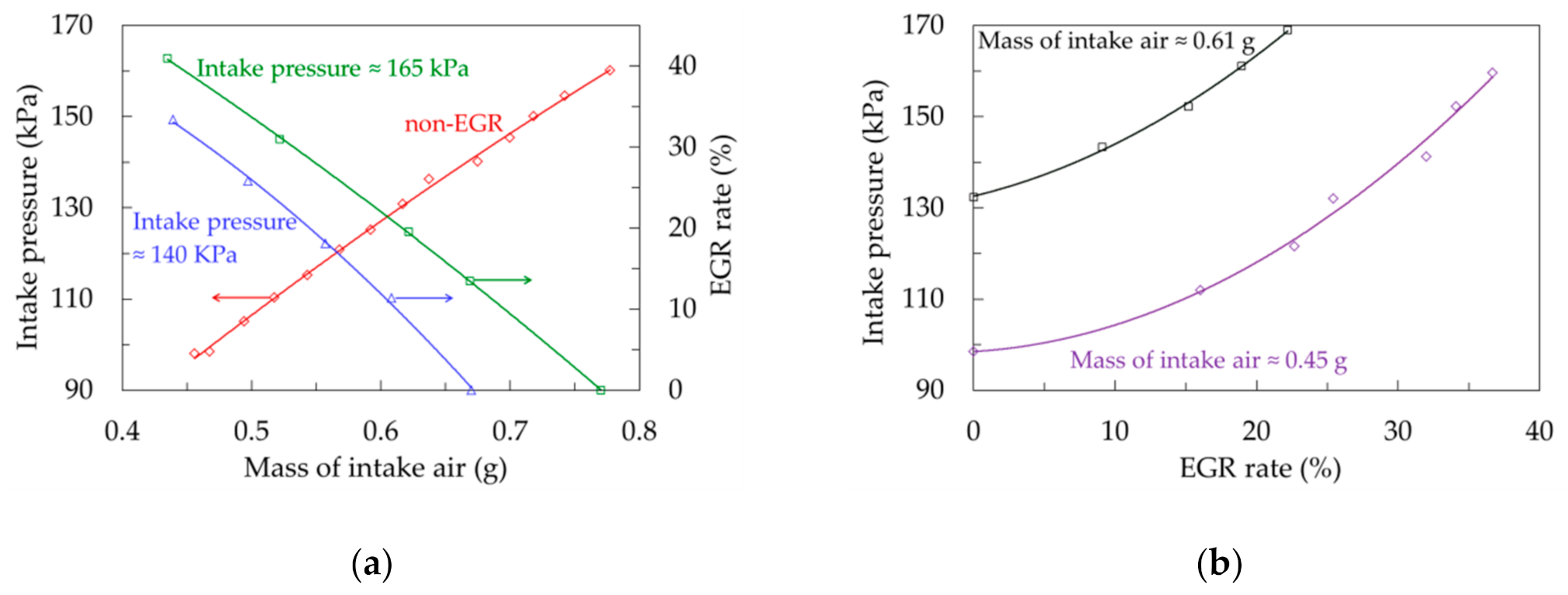
The engine was fueled with commercial (EN 590 standard) diesel fuel. To avoid the impact of variable exhaust runner dynamic pressure changes on λ readings, the experiments were conducted at a constant rotational speed of the engine (2000 rev/min), but at variable fueling, boost pressures, and EGR rates. The exact parameter sweeps are not discussed in detail here because their sole purpose was to provide the exhaust gas with the required air excess and pressure. Therefore, it suffices to mention that the applied engine settings replicated a wide range of real engine operating envelopes extrapolated toward ultra-lean operation and heavy EGR conditions.
Figure 4 shows the relations between gas exchange control parameters.
At a fueling rate of approximately 15 mg/cycle, the presented range of intake air mass provided the λ span ranging from 1.95 to 3.5. With maximum attainable boost pressure of 1.6 bar, further enleanment of the mixture was achieved by reducing the fueling rate. The complete experimental matrix included variations of mass of fuel injected from 6 to 16 mg, providing a brake mean effective pressure range from 0 to 0.5 MPa. Under all operating conditions, the exhaust backpressure was maintained at a level reflecting the turbocharger coupling.
Additionally, it is worth noting that under all tested conditions, the engine injection control parameters were adjusted to avoid excessive exhaust emissions, as they could affect λ readings (refer to
Section 2.1 and
Section 2.2. For details). To this end, fuel was injected using the split injection technique, which provides the best soot (particulates)/NO
X trade-off (constant main fuel injection at 8 Crank angle degrees before the top dead center; 1.4 mg pilot fuel value with pilot injection timing optimized). At neither of the operating points, the NO
X or particulate matter emissions did exceed 4.5 or 0.3 g/kWh, respectively. At the same time, CO and HC emissions were constrained below 2 and 1 g/kWh, limiting the EGR/λ exploration space to values below 40% and above 1.4, respectively. Further data analysis relied on comparing the λ value measured directly using the UEGO sensor and dedicated signal conditioner (LA4) with the λ calculated by the carbon balance equation with FTIR readings as inputs. The AVL SESAM FTIR enables the simultaneous measurement of the content of specific hydrocarbons, nitrogen oxides, and other chemical exhaust gases compounds. The exhaust gases were transferred from the engine to the FTIR analyzer through a heated line. The response time of the analyzer was a single second. The time-averaged value of the 30 s measurement period was taken as a single reading result. The reference value calculation procedure is discussed in detail below.
3.3. Reference λ Determination
The reference λ value (λ
ref), considered as the real value, was calculated using the carbon balance in Equation (6) for wet exhaust analysis [
26] in the following way
The results of exhaust composition from the FTIR multi-compound analytical system served as an input for this equation. The x with respective subscript denotes the concentration of total HCs, CO, CO2, and H2O in the exhaust at a given operating point. Mair is the average molecular mass of air, Mfuel is the molecular mass of the fuel, while (mfuel/mair) stoi is the stoichiometric fuel–air ratio, i.e., the theoretical air demand. The molecular ratio of hydrogen to carbon (y) for the diesel fuel used in the present research was 1.875.
It should be noted that the method does not rely on the O2 concentration. More importantly, since the λ obtained via Equation (6) is directly composition-based, it is insensitive to changes in the measurement conditions (pressure, temperature, EGR, etc.). Hence, the method discussed here provides a reliable reference value for validating measurement results from the UEGO sensor.
4. Results
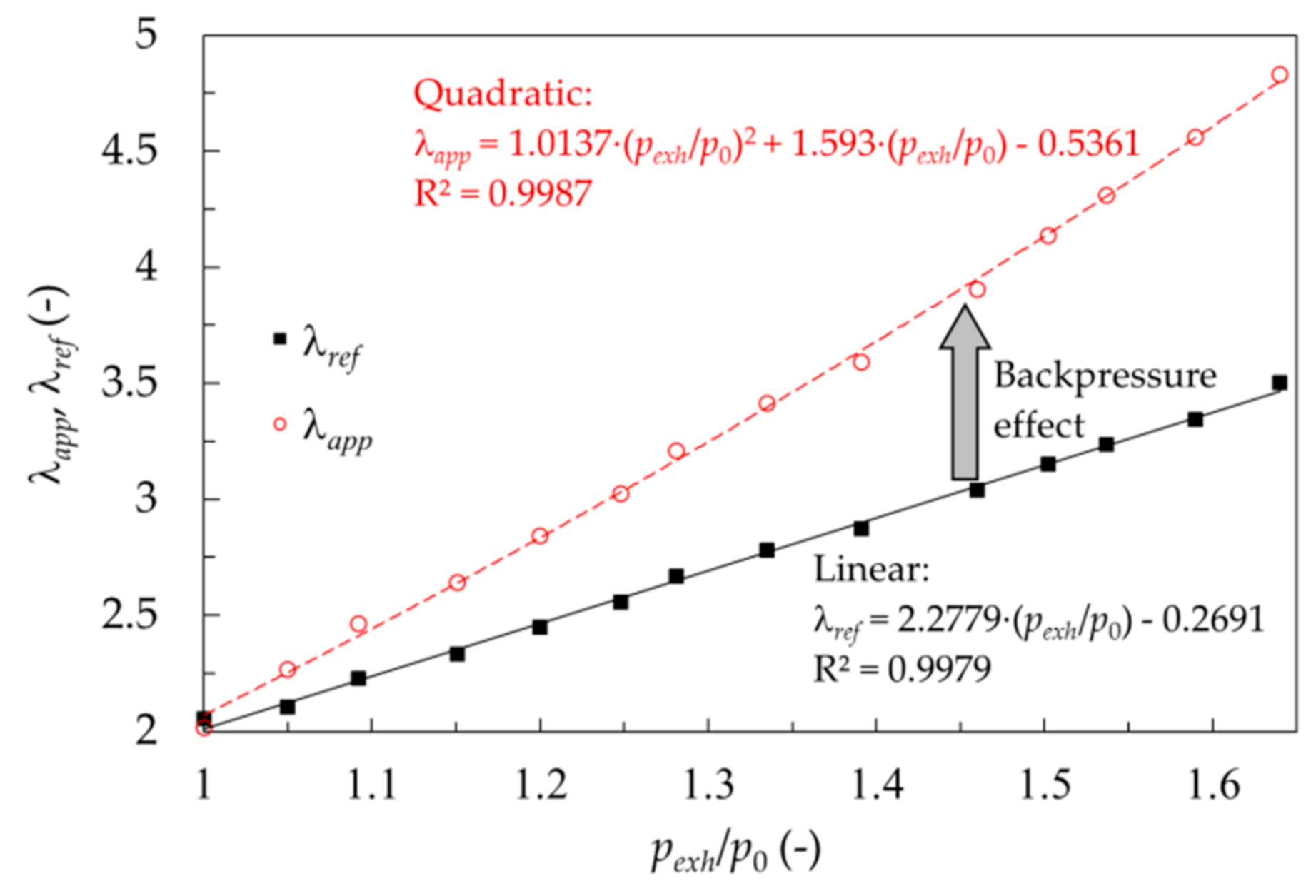
As highlighted in the introduction and elaborated on in the background section, the UEGO sensor readings depend on the pressure in the measurement environment.
Figure 5 confirms this thesis by comparing the λ signal from the Bosch LSU 4.2 UEGO sensor (λ
app) with the λ results obtained via FTIR measurements and Equation (6) (λ
ref) at a variable exhaust-to-ambient-pressure ratio.
At the 101 kPa exhaust pressure, the λ values obtained with the Bosch sensor and FTIR analyzer agree. At constant fueling, the FTIR results representing the real value are linear to the exhaust pressure because the exhaust pressure followed the intake pressure, which nearly linearly translates to cylinder volumetric efficiency. Due to the UEGO sensor measurement principle, an increase in the exhaust pressure results in the overestimation of λ
app. At a given oxygen mole fraction, the partial pressure is proportional to the exhaust pressure, thus changing the difference in oxygen concentrations on opposite sides of the membrane. It should be noted that reference air is under ambient pressure. In turn, this force increased pump operation to equalize the above concentrations (voltages). As the pump current is converted to lambda, the effect of pressure is nearly quadratic, as shown in
Figure 5. As a result, for the highest tested pressure ratio of 1.64, the lambda sensor overestimated the actual lambda value by over 37% (λ
app = 4.81 vs. λ
ref= 3.49). Note the measurement points presented in
Figure 5 are time-averaged values (sampled at 1 Hz over 60 s acquisition window) from individual steady-state operating points. For the discussed no-EGR conditions, the instantaneous readings of both the Bosch LSU 4.2 UEGO sensor (λ
app) and the exhaust pressure probe were very stable pertaining to the high fidelity of thermal management used in our single cylinder research engine. The standard deviations of λ
app and p
exh/p
0 did not exceed 0.1 and 0.02 respectively, for all points presented on the red curve. The diameter of the red circles in
Figure 5 gives a good estimate of maximum uncertainty here. The standard deviations of λ
ref were not available because the instantaneous compositions in Equation (6) were not recorded.
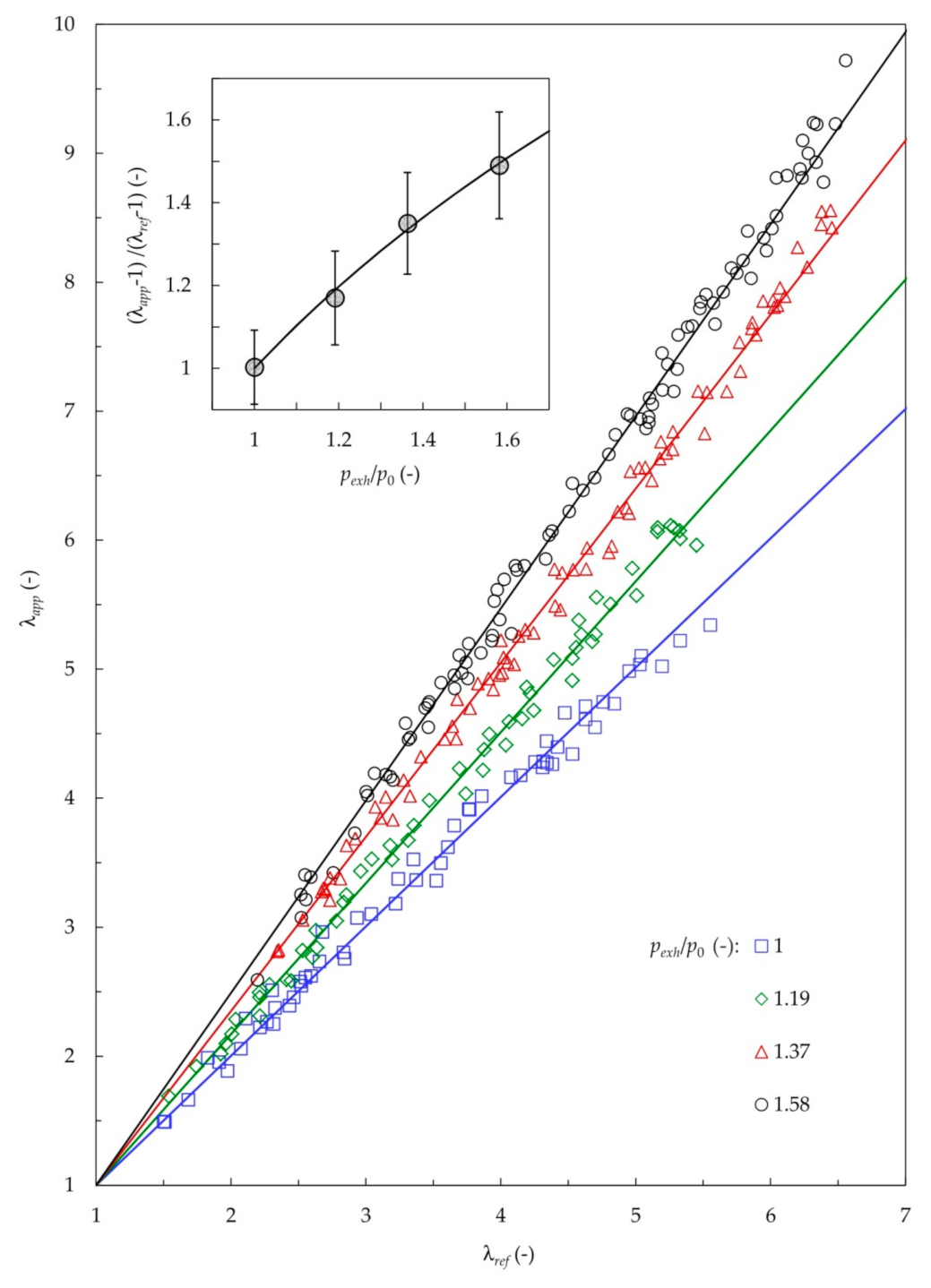
Figure 6 shows the cumulative results of different EGR range sand fueling rates grouped by color-coding into four exhaust pressure ranges.
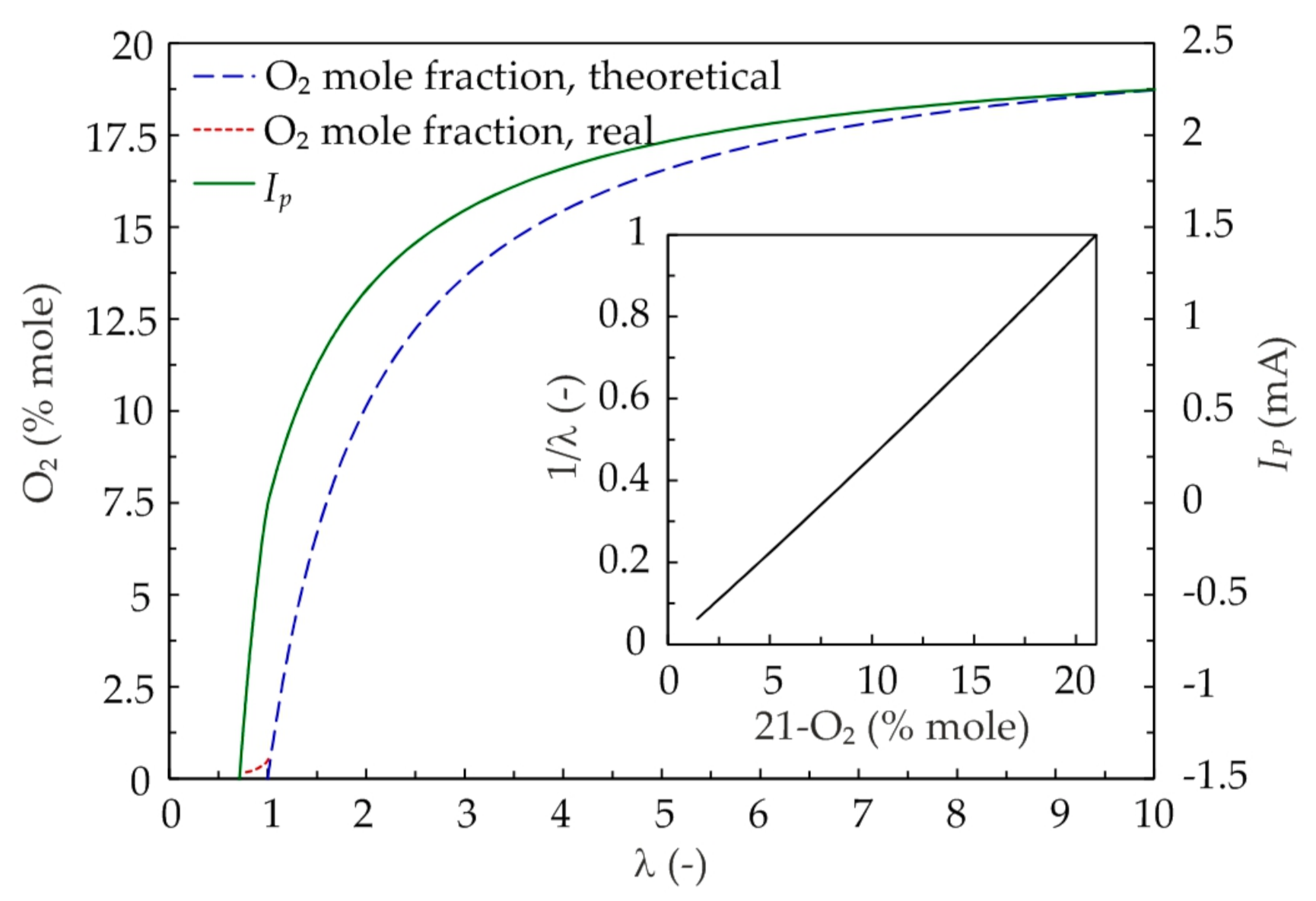
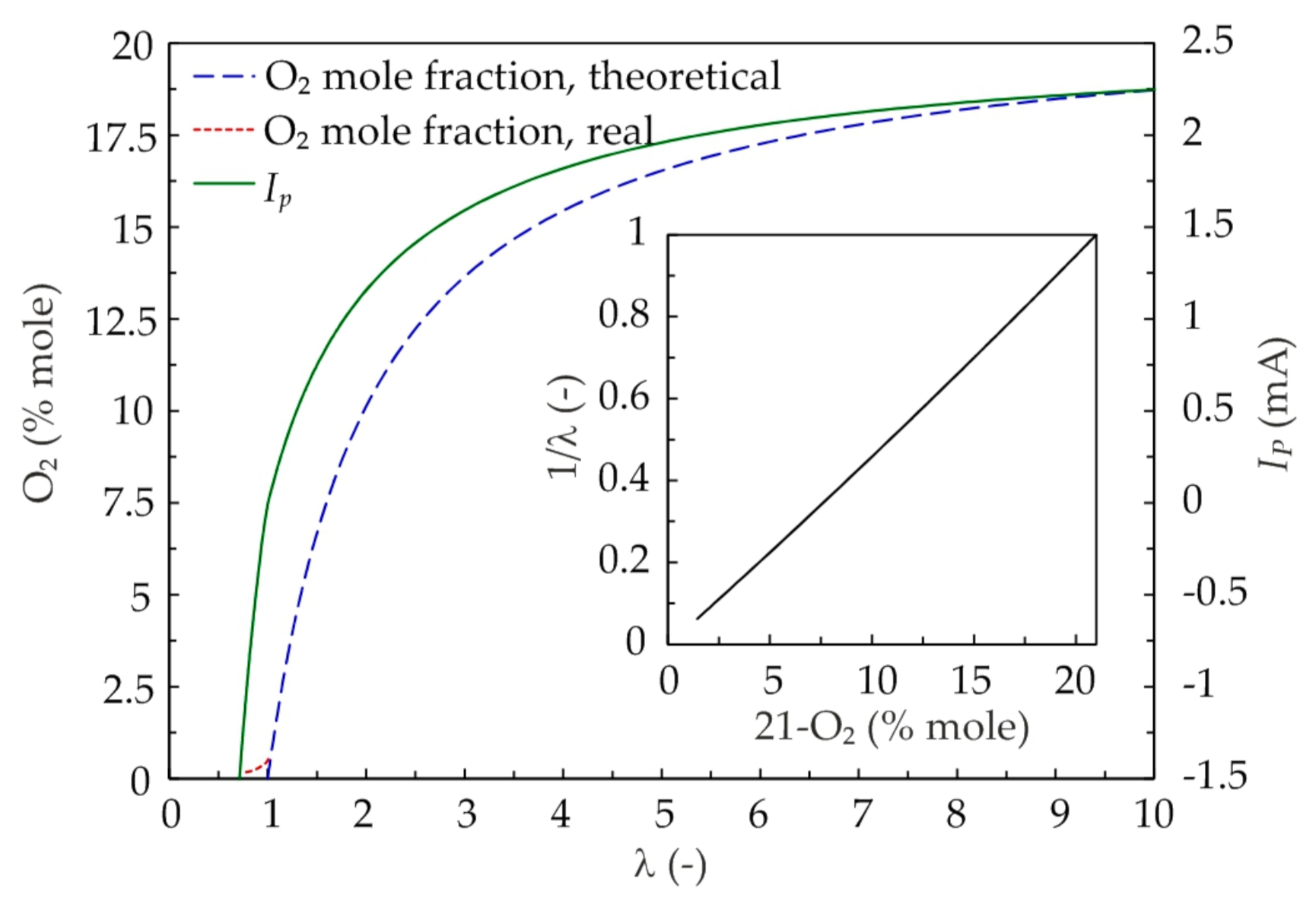
It can be noted that for the exhaust pressure at ambient pressure, there is a good agreement between the results obtained with the UEGO sensor and the reference carbon balance method. For the individual exhaust pressure, the correlation between the two signals is linear. It should be noted that the dispersion of the measurement points around the line of regression increases with increasing λ. This directly results from the decreasing sensitivity of the sensor (see
Figure 2 for reference), rather than from the EGR itself. No EGR dependence is observed between the results, and the overall dispersion around the respective exhaust pressure fits is the combined effect of measurement accuracy and other factors such as sampling temperature.
In addition to the above, it should be noted that the exhaust pressure itself was controlled by the system with an accuracy of ±2 kPa. According to the dependencies established in the present study, this translates to roughly 1.23% of the possible error caused solely by a point-to-point deviation in the exhaust pressure.
The pressure ratio is of prime significance. Since λ
app changes linearly with λ
ref for individual pressure ratios, the directional coefficient of this line changes with the pressure ratio itself. This dependence is plotted in the upper left corner of
Figure 6. One can note that the relation here is logarithmic and can be explicitly formulated as shown in Equation (7):
Adopting the nomenclature of the previous UEGO sensor models discussed in
Section 3.3, Equation (7) can be used to model the output of the sensor (λ
app) at different exhaust backpressure values. Assuming that the value of λ
ref is always equal to λ(p
0), one gets
where k = 1.08. However, it should be stressed that the above equation is only valid for lean mixtures.
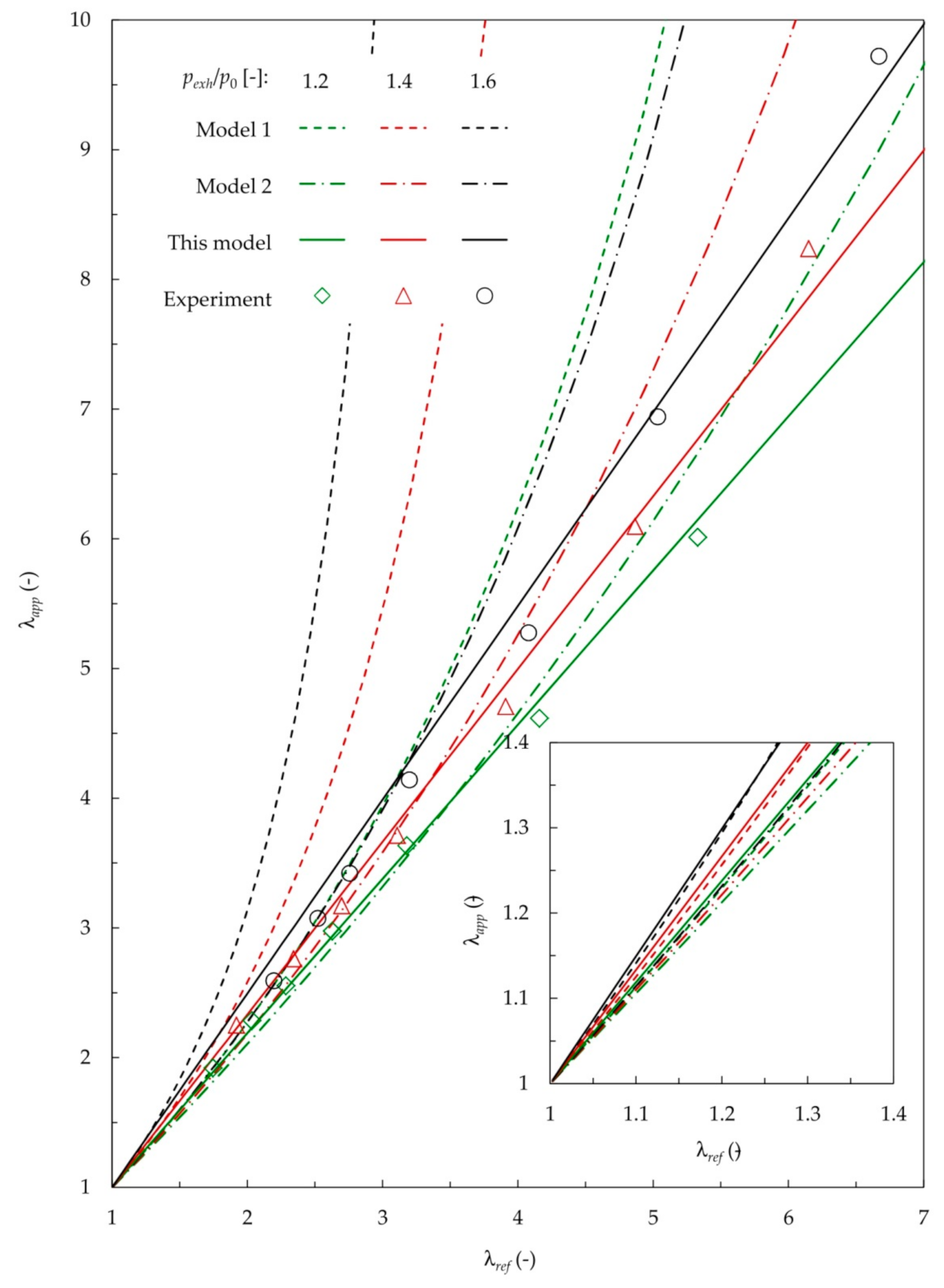
5. Discussion and Outlook
This section benchmarks the wideband lambda sensor model proposed in Equation (8) against other correlations available in the literature. Model 1 refers to the correlation by Irimescu [
17] expressed directly through Equation (5). Model 2 refers to the approach by Bosch [
25], where the sensor characteristics from
Figure 2 were used to convert the pump current expressed by Equation (4) to the λ
app values.
Figure 7 presents the results of this benchmark.
According to the results, the two previous UEGO models proposed for turbocharged spark ignition engines, i.e., Model 1 and Model 2, fail under large excess air conditions that are typical of the diesel engine operation regime. On the other hand, the new model shows a good agreement with the experimental findings in a wide range of λ values between 2 and 7. The maximum relative error did not exceed 7%.
It is worth emphasizing that reliable validation results for Model 1, covering the λ range from 1 to 1.2, were presented in Irimescu [
17]. However, due to the diesel combustion regime restrictions, this region was beyond the scope of the present study. Still, the model proposed in this work makes it possible to capture the low lambda range with good accuracy, as shown by the inner graph plotted in
Figure 7. The deviation from Model 1 in this range did not exceed 0.8%. On the other hand, compared to the experimental findings of this study, the error of Model 1 at λ = 2 was 3.5%, 9.5%, and 20% for the exhaust-to-ambient-pressure ratios of 1.2, 1.4, and 1.6., respectively. Ultimately, the higher the backpressure, the higher the λ estimation error becomes for Model 1 and Model 2 alike. However, this is not the case with the new model, where the probability distribution is relatively independent of the backpressure.
Finally, it should be noted that the Model 2 predictions appear to fit the results better than those obtained with Model 1 at a larger range of lambda values. Nevertheless, it must be observed that the lambda results obtained with Model 2 are drastically underestimated for the range of its intended usage. For λ between 1.2 and 1.4, the discrepancy between the predictions of Model 1 (carefully validated results are available) and Model 2 amounts to 11%. It should be observed that Model 2 is typically used for UEGO sensor calibration; however, its validation results have not been revealed. The present work suggests that the suitability of Model 2 is questionable, even for typical spark ignition engine applications.
The new model derived in this work is instrumental for cylinder-individual lambda control strategies enabling the next generation of lean-burn engines. The potential application ranges from incremental improvement of conventional diesel combustion (to improve cold-start strategies with smokeless combustion) to advanced low-temperature combustion concepts such as HCCI or RCCI. In the latter case, the λ management issue is of prime importance for achieving controllable combustion with superior efficiency and emission trade-off [
27,
28].
The following steps form our research agenda in this direction: (1) in the short term, the new sensor model will be used to develop a real-time-capable correction routine and to test it in transient engine operation together with a response delay correction routine; (2) in the long term, the advantage of individual cylinder-based λ control will be demonstrated using the advanced low-temperature combustion platform developed by the authors in [
29].









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}