Analysis of Impact of Rain Conditions on ADAS


Abstract
:1. Introduction
2. Review of LDWS Evaluation Standard
2.1. International Standard for LDWS
2.2. Domestic Standards (South Korea)
2.3. Summary and Implications
3. Lane Departure Warning System Performance Test Methodology
3.1. Performance Test Equipment
3.2. Properties and Characteristics of Collected Data
3.2.1. Properties of Collected Data
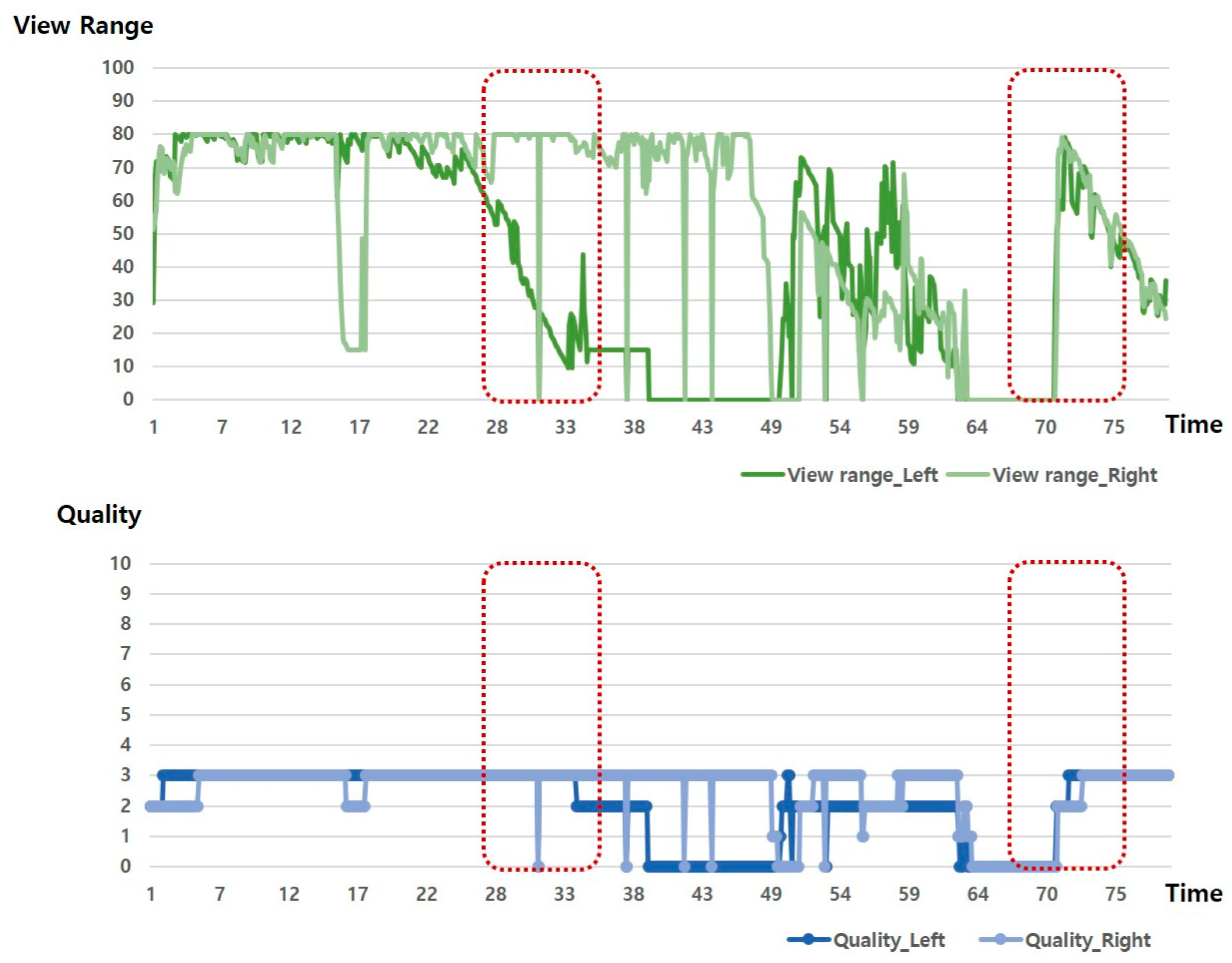
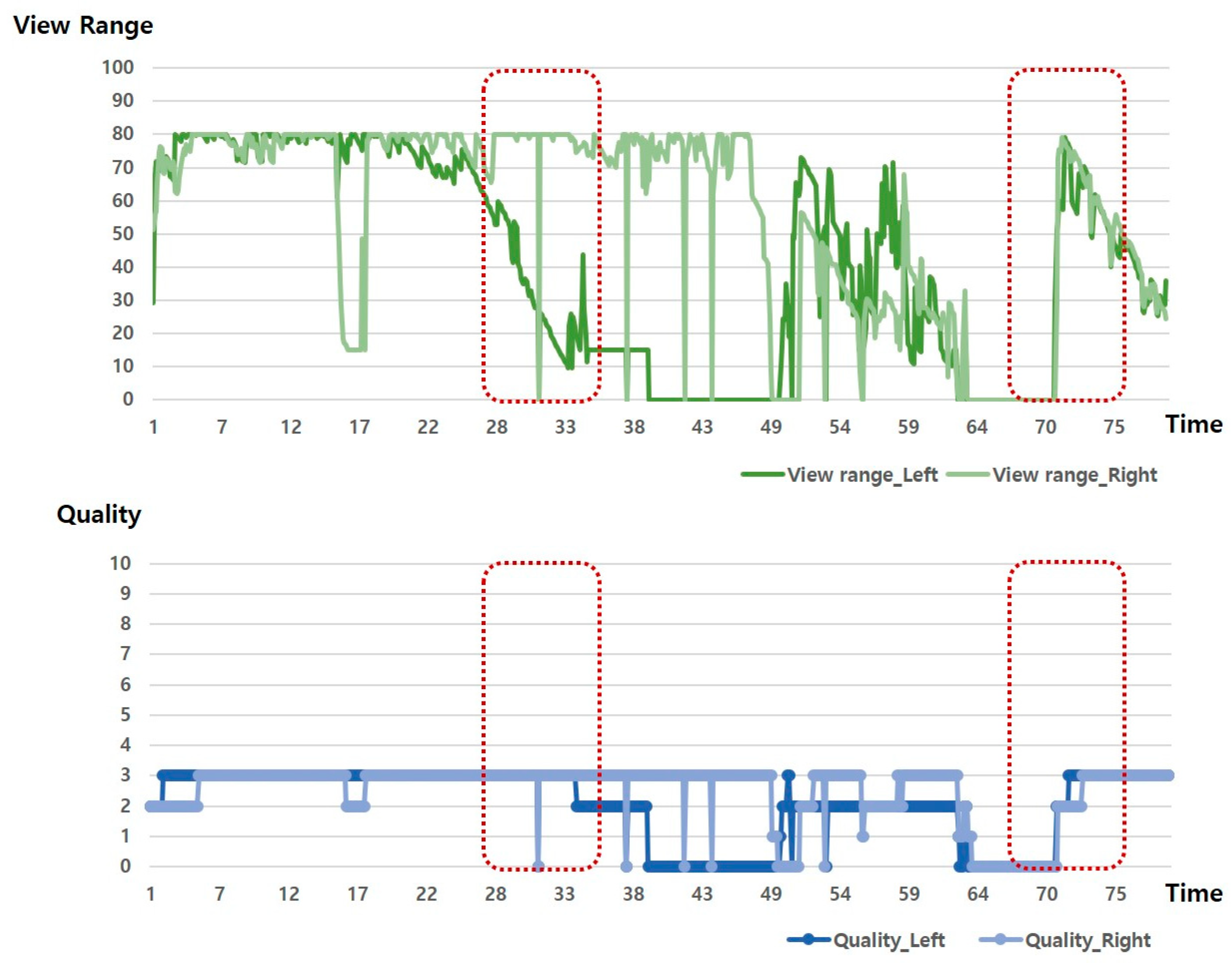
- View Range
- -
- Distance from the ADAS (LDWS) attached to the vehicle to the farthest obtained lane, the range of ADAS (LDWS) visibility in each situation, and time point
- -
- Value within the range of 0 to 127.996 m (actual range on the basis of test driving: 0 to 80)
- Lane Type
- -
- Classified into a total of six types
- -
- 0: dashed; 1: solid; 2: undecided; 3: road edge; 4: double land mark (including dashed on one side); 5: Botts’ dots; 6: invalid
- Width left (right) marking
- -
- Thickness of the lane on the left (right) side of the vehicle (in meter)
- Quality
- -
- Expresses the quality of lane information in a range of 0 to 3
- -
- 0, 1: low quality, not give an LDWS in that situation; 2, 3: High quality
- -
- It is possible to collect lane information even in the situation of Quality 0 or 1, and LDWS alarm is provided using the collected information
3.2.2. Data Characteristics
3.3. Experiment Methodology
4. Results of LDWS Data Characterization during Rainfall
4.1. ADAS (LDWS) Data Characteristic Analysis Methodology by Rainfall Intensity
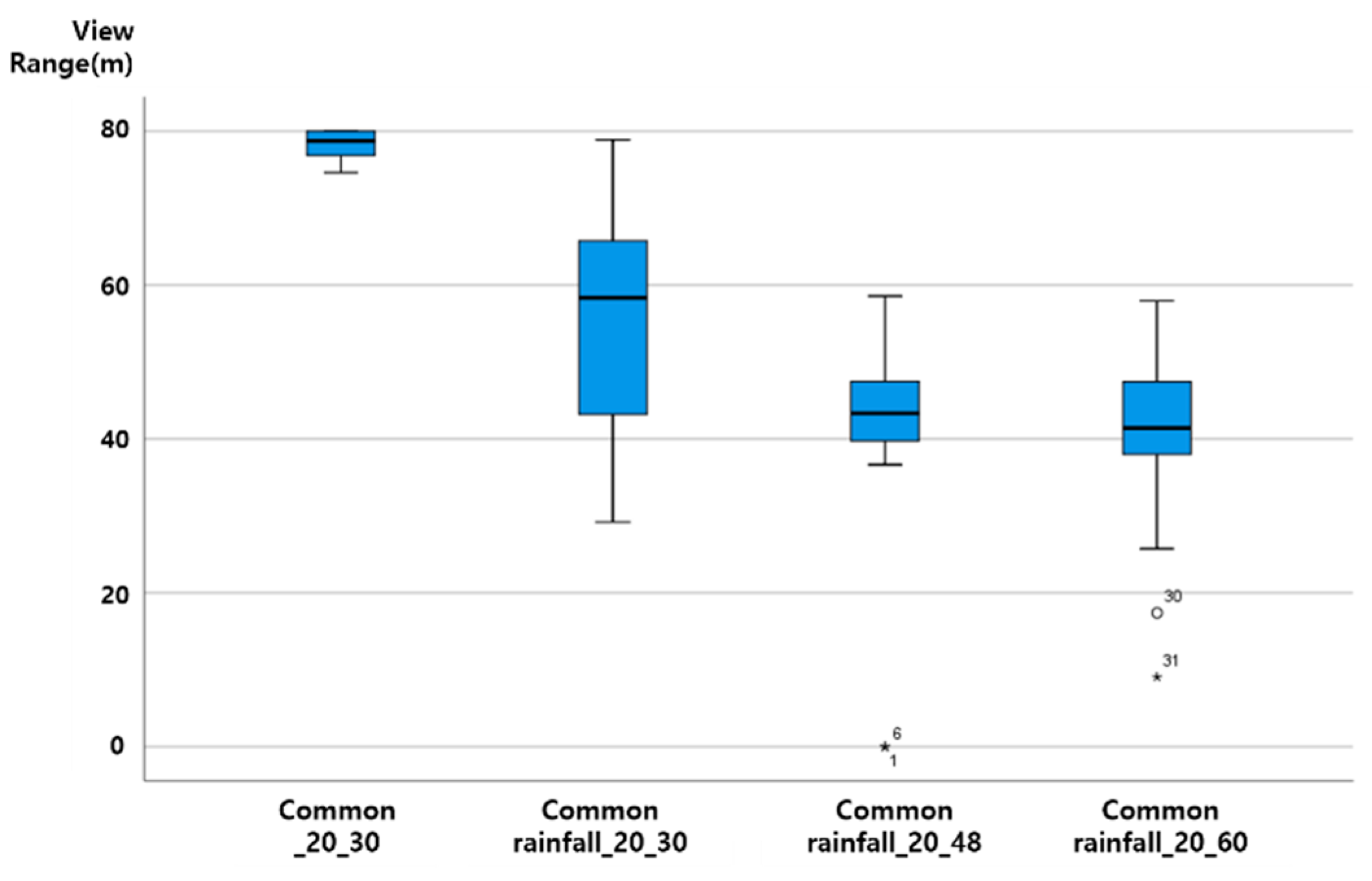
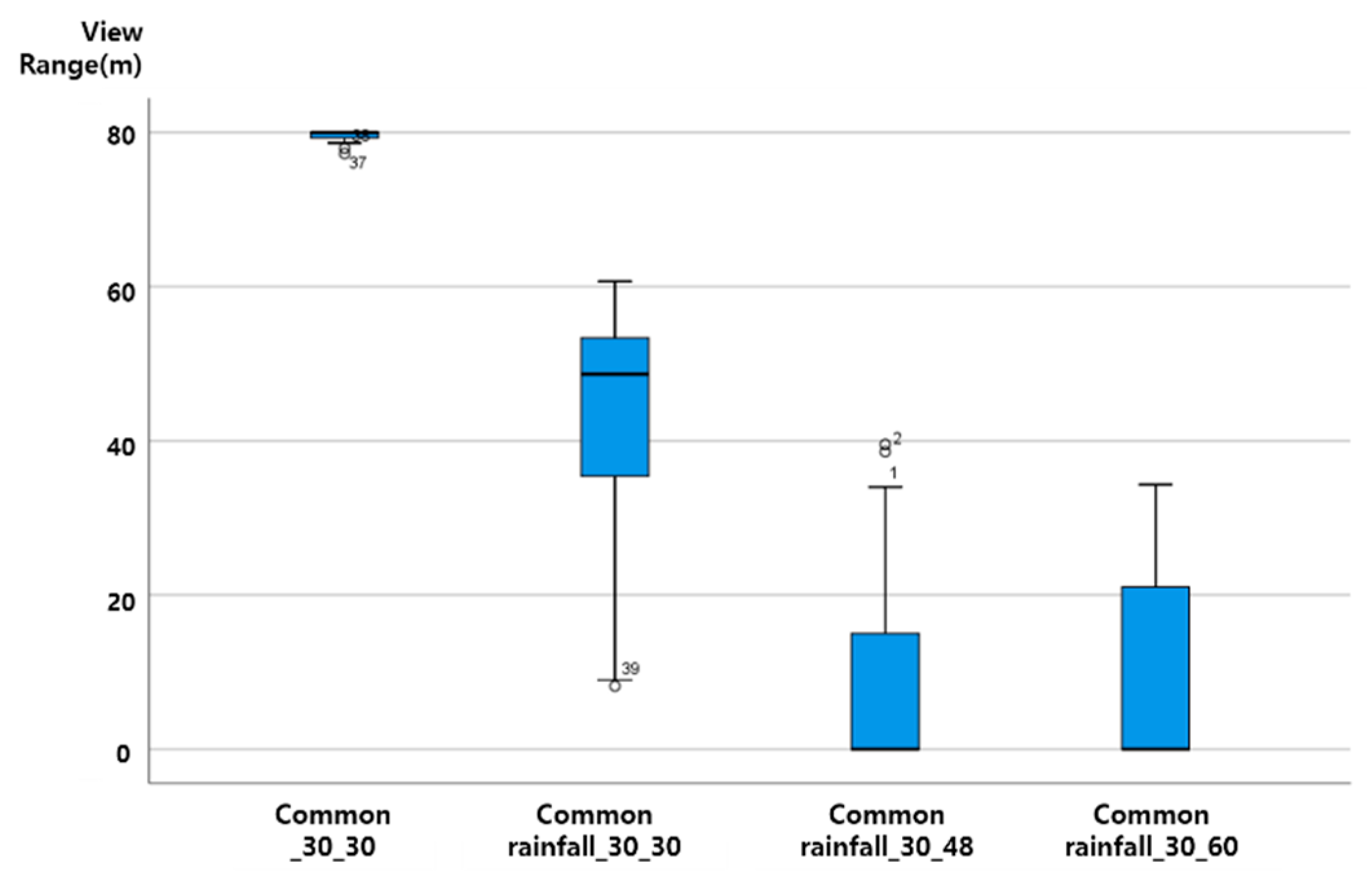
4.2. ADAS (LDWS) Data Characteristic Analysis Result by Rainfall Intensity
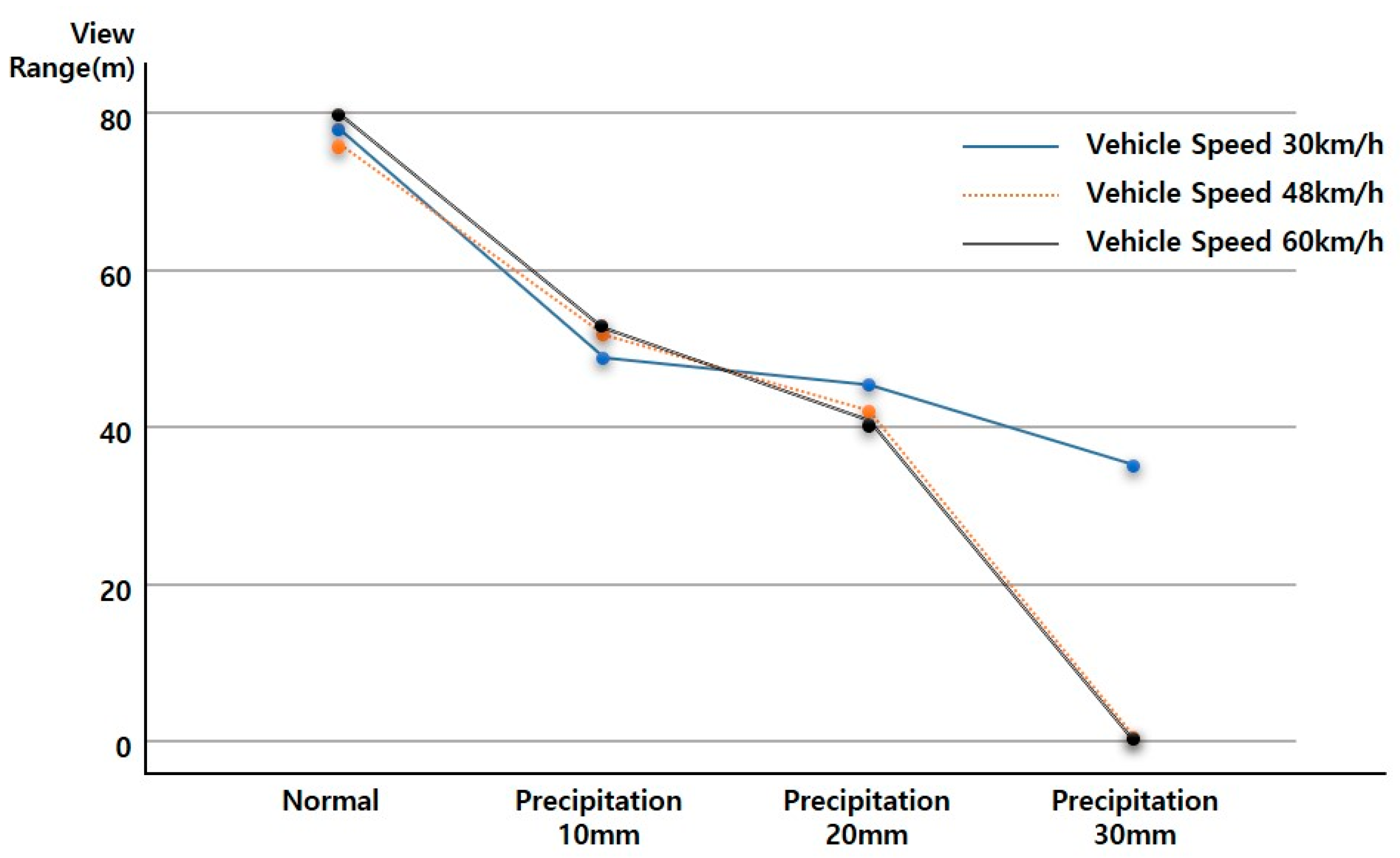
4.3. ADAS (LDWS) Data Change According to Precipitation Change
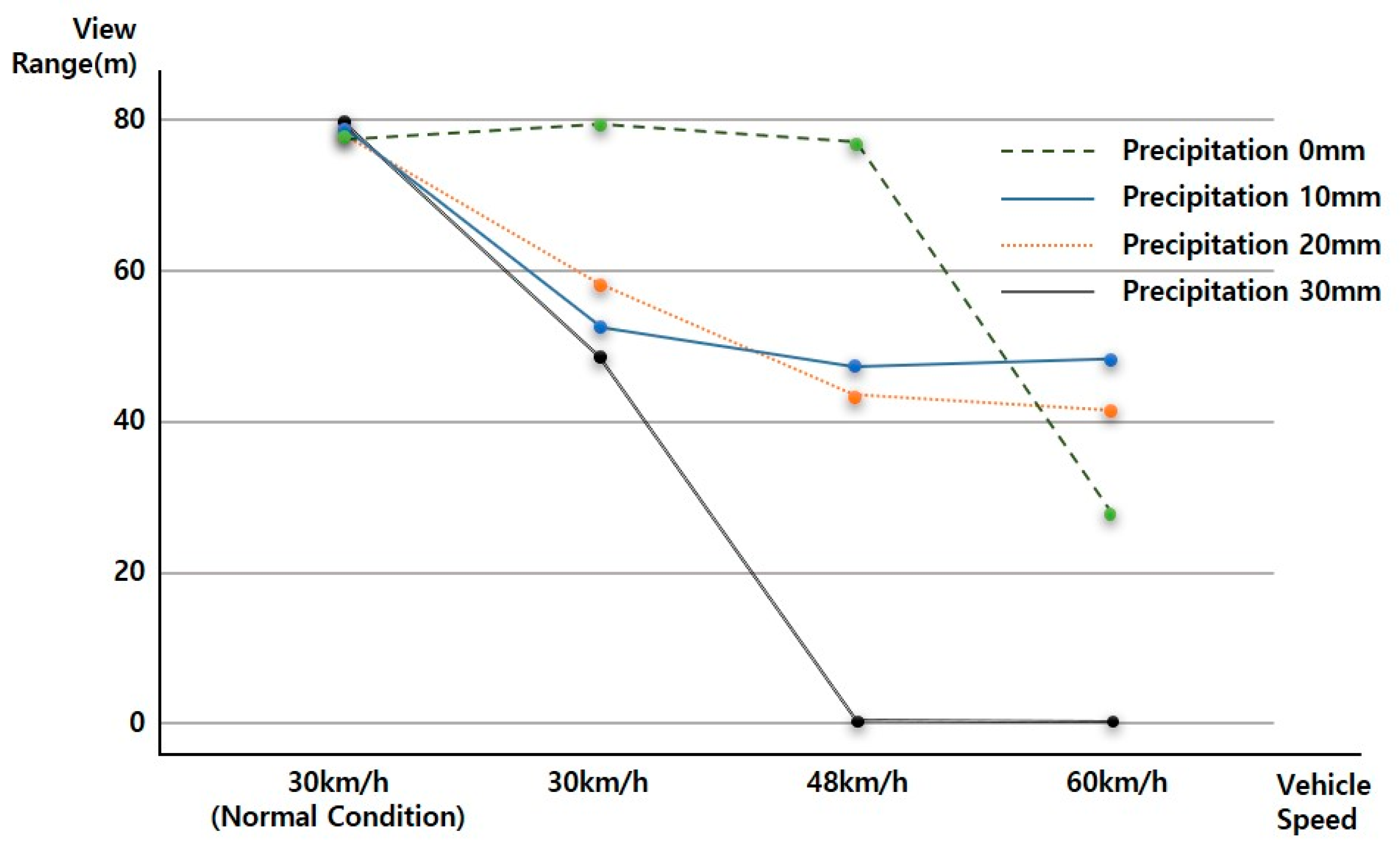
4.4. ADAS (LDWS) Data Change According to Vehicle Speed Change
5. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Young, M. Ergonomics Issues with Advanced Driver Assistance Systems (ADAS). Automot. Ergon. 2012, 810, 55–76. [Google Scholar] [CrossRef]
- Ziebinski, A.; Cupek, R.; Grzechca, D.; Chruszczyk, L. Review of advanced driver assistance systems (ADAS). In AIP Conference Proceedings; AIP Publishing LLC: Melville, NY, USA, 2017; Volume 1906. [Google Scholar] [CrossRef]
- Orlovska, J.; Novakazi, F.; Lars-Ola, B.; Karlsson, M.; Wickman, C.; Söderberg, R. Effects of the driving context on the usage of Automated Driver Assistance Systems (ADAS)—Naturalistic Driving Study for ADAS evaluation. Transp. Res. Interdiscip. Perspect. 2020, 4, 100093. [Google Scholar] [CrossRef]
- Driver Assistance Technologies. Available online: https://www.nhtsa.gov/equipment/safety-technologies#ldw (accessed on 22 September 2020).
- Hamid, U.Z.A.; Pushkin, K.; Zamzuri, H.; Gueraiche, D.; Rahman, M.A.A. Current Collision Mitigation Technologies for Advanced Driver Assistance Systems–A Survey” (PDF). Perintis eJ. 2016, 6, 78–90, Retrieved 14 June 2017. Available online: https://perintis.org.my/ejournal/2016-volume-6-no-2/ (accessed on 12 October 2020).
- Ministry of Land, Infrastructure and Transport (MOLIT). Obligatory Installation of Lane Departure Warning Device Expansion of Subsidy Support Target. Available online: http://www.molit.go.kr/USR/NEWS/m_71/dtl.jsp?lcmspage=7&id=95080994 (accessed on 22 September 2020).
- National Highway Traffic Safety Administration, Department of Transportation. National Motor Vehicle Crash Causation Survey. Report DOT HS 811 059; NHTSA: Washington, DC, USA, 2008; pp. 23–24.
- Fagnant, D.J.; Kockelman, K.M. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Schoettle, B. Sensor Fusion: A Comparison of Sensing Capabilities of Human Drivers and Highly Automated Vehicles; University of Michigan: Ann Arbor, MI, USA, 2017. [Google Scholar]
- Hadi, M.; Sinha, P.; Easterling, J.R.; Iv, J.E. Effect of Environmental Conditions on Performance of Image Recognition-Based Lane Departure Warning System. Transp. Res. Rec. J. Transp. Res. Board 2007, 2000, 114–120. [Google Scholar] [CrossRef]
- Goodin, C.; Carruth, D.; Doude, M.; Hudson, C. Predicting the Influence of Rain on LIDAR in ADAS. Electronics 2019, 8, 89. [Google Scholar] [CrossRef] [Green Version]
- Byeon, M.; Yoon, S.W. Analysis of Automotive Lidar Sensor Model Considering Scattering Effects in Regional Rain Environments. IEEE Access 2020, 8, 102669–102679. [Google Scholar] [CrossRef]
- Jeong, K.M.; Song, B.C. Fog Detection and Fog Synthesis for Effective Quantitative Evaluation of Fog–detection-and-removal Algorithms. IEIE Trans. Smart Process. Comput. 2018, 7, 350–360. [Google Scholar] [CrossRef]
- Tumas, P.; Nowosielski, A.; Serackis, A. Pedestrian Detection in Severe Weather Conditions. IEEE Access 2020, 8, 62775–62784. [Google Scholar] [CrossRef]
- Kurihata, H.; Takahashi, T.; Ide, I.; Mekada, Y.; Murase, H.; Tamatsu, Y.; Miyahara, T. Rainy weather recognition from in-vehicle camera images for driver assistance. In Proceedings of the IEEE Intelligent Vehicles Symposium 2005, Las Vegas, NV, USA, 6–8 June 2005; pp. 205–210. [Google Scholar]
- Cheng, G.; Zheng, J.Y.; Murase, H. Sparse Coding of Weather and Illuminations for ADAS and Autonomous Driving. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 2030–2035. [Google Scholar]
- Hasirlioglu, S.; Riener, A. Introduction to rain and fog attenuation on automotive surround sensors. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–7. [Google Scholar]
- Hadj-Bachir, M.; De Souza, P. LIDAR Sensor Simulation in Adverse Weather Condition for Driving Assistance Development. 2019. –01998668. Available online: https://hal.archives-ouvertes.fr/hal-01998668 (accessed on 22 September 2020).
- California Department of Motor Vehicles (CA DMV). Disengagements Reports. Available online: https://www.dmv.ca.gov/portal/vehicle-industry-services/autonomous-vehicles/disengagement-reports (accessed on 20 June 2020).
- Dixit, V.V.; Chand, S.; Nair, D.J. Autonomous Vehicles: Disengagements, Accidents and Reaction Times. PLoS ONE 2016, 11, e0168054. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lv, C.; Cao, D.; Zhao, Y.; Auger, D.J.; Sullman, M.; Wang, H.; Dutka, L.M.; Skrypchuk, L.; Mouzakitis, A. Analysis of autopilot disengagements occurring during autonomous vehicle testing. IEEE/CAA J. Autom. Sin. 2018, 5, 58–68. [Google Scholar] [CrossRef] [Green Version]
- Yun, H.; Kim, S.; Lee, J.; Yang, J. Analysis of Cause of Disengagement Based on U.S. California DMV Autonomous Driving Disengagement Report. Trans. Korean Soc. Automot. Eng. 2018, 26, 464–475. [Google Scholar] [CrossRef]
- Boggs, A.M.; Arvin, R.; Khattak, A.J. Exploring the who, what, when, where, and why of automated vehicle disengagements. Accid. Anal. Prev. 2020, 136, 105406. [Google Scholar] [CrossRef] [PubMed]
- Roh, C.-G.; Im, I.-J. A Review on Handicap Sections and Situations to Improve Driving Safety of Automated Vehicles. Sustainability 2020, 12, 5509. [Google Scholar] [CrossRef]
- ISO. Intelligent Transport Systems; Lane Departure Warning Systems; Performance Requirements and Test Procedures; International Organization for Standardization: London, UK, 2017. [Google Scholar]
- SAE. Surface vehicle Information Report: Lane Departure Warning Systems: Information for the Human Interface (J2808 (LDW)); Society of Automotive Engineers International: Warrendale, PA, USA, 2017. [Google Scholar]
- U.S. Department of Transportation. Lane Departure Warning System Confirmation Test and Lane Keeping Support Performance Documentation (NHTSA-2006-26555-0135); U.S. Department of Transportation and National Highway Traffic Safety Administration (NHTSA): Washington, DC, USA, 2013.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | ISO 17361 | SAE Information Report J2808 (LDW) | NHTSA 2006-26555-0135 (LDW) |
|---|---|---|---|
| Target Vehicle | Test vehicle not esceeding 150 kg including one driver boarding and test equipment | Light-duty vehicles | Lightweight vehicle with a maximum vehicle weight class (GVWR) of 10,000 |
| Test Speed | - | 44.74 mph (72 km/h) | 45 mph (72.4 km/h) |
| Road and environmental conditions | Flat, dry asphalt or concrete surface Radius of curvature: 250 m or 500 m Visible lane markings in good condition Temperature: 10 °C ± 30 °C. | Good weather Straight road Radius of curvature over 500 m | Good weather (Ideal conditions) Straight road |
| Regulation of the Lane to be Recognized | Lane in accordance with standards | - | Continuous white lines Discontinuous yellow lines Discontinuous Botts dot Raised pavement markers |
| Performance Standards (Criteria for passing the tests) | Warning generation test Repeatability test False alarm test | - | 66% or more of the total number of times |
| Remark | - | Follow symbols and information provision method of ISO | - |
| Classification | Performance Test Standard | Performance Standard | |
|---|---|---|---|
| KS R 1172 | Vehicle Safety Evaluation Test | Performance and Standards of Automobiles and Auto Parts | |
| Target Vehicle | No vehicle model standards Test less than 150 kg including one driver boarding and test equipment, or the maximum weight test (by agreement between consignee and deliverer, it is possible to test with the weight of 5 passengers) | Passenger cars, omnibuses and small trucks with a gross weight of 4.5 tons or less | Passenger car (excluding light-size omnibuses) Truck and special vehicles exceeding 3.5 tons of gross vehicle weight |
| Test Speed | 100 km/h or more Over 60 km/h on highway Over 60 km/h on national highway and local roads | 65 km/h ± 3 km/h | 60 km/h |
| Road and environmental conditions | Curvature standard: ≥500 m, ≥250 m Road rank: highway, national road, local road Weather: Sunny (4 types), Rain (4 types), Snow (4 types), Fog (2 types) Others: tunnel, day/night (with street light) | Smooth and dry asphalt or concrete road surface Visible lane markings in good condition | - |
| Regulation of the Lane to be Recognized | - | Four types of yellow double line (center line), white dotted line and white solid line (lane), blue solid line (dedicated lane) white solid line | - |
| Performance Standards | - | 90% or more of the total number of times | - |
| Remark | - | Severe weather conditions are excluded from evaluation according to the environmental conditions presented. | Warning lights on in case of bad weather such as fog or heavy rain (Lane information may not be provided) |
| Domestic standards that the product must satisfy to participate in the bidding according to the Public Procurement Service announcement on the Order (Subsidy Project) due to obligatory installation of LDWS according to the revision of MOLIT. | |||
| Collected Data | |
|---|---|
| Common Data | Lane Data |
| Time Latitude Longitude | Model degree |
| Quality | |
| Lane type | |
| Position parameter C0 | |
| Curvature parameter C2 | |
| Curvature derivative parameter C3 | |
| Width left marking | |
| Heading angle | |
| View Range | |
| View Range availability | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roh, C.-G.; Kim, J.; Im, I.-J. Analysis of Impact of Rain Conditions on ADAS. Sensors 2020, 20, 6720. https://doi.org/10.3390/s20236720
Roh C-G, Kim J, Im I-J. Analysis of Impact of Rain Conditions on ADAS. Sensors. 2020; 20(23):6720. https://doi.org/10.3390/s20236720
Chicago/Turabian StyleRoh, Chang-Gyun, Jisoo Kim, and I-Jeong Im. 2020. "Analysis of Impact of Rain Conditions on ADAS" Sensors 20, no. 23: 6720. https://doi.org/10.3390/s20236720
APA StyleRoh, C.-G., Kim, J., & Im, I.-J. (2020). Analysis of Impact of Rain Conditions on ADAS. Sensors, 20(23), 6720. https://doi.org/10.3390/s20236720