Estimating Lower Limb Kinematics Using a Lie Group Constrained Extended Kalman Filter with a Reduced Wearable IMU Count and Distance Measurements †


Abstract
:1. Introduction
1.1. Existing Algorithms for Human Motion Tracking Using Fewer IMUs
1.2. Improving Human Pose Estimation Using Additional Sensor Measurements
1.3. Novelty
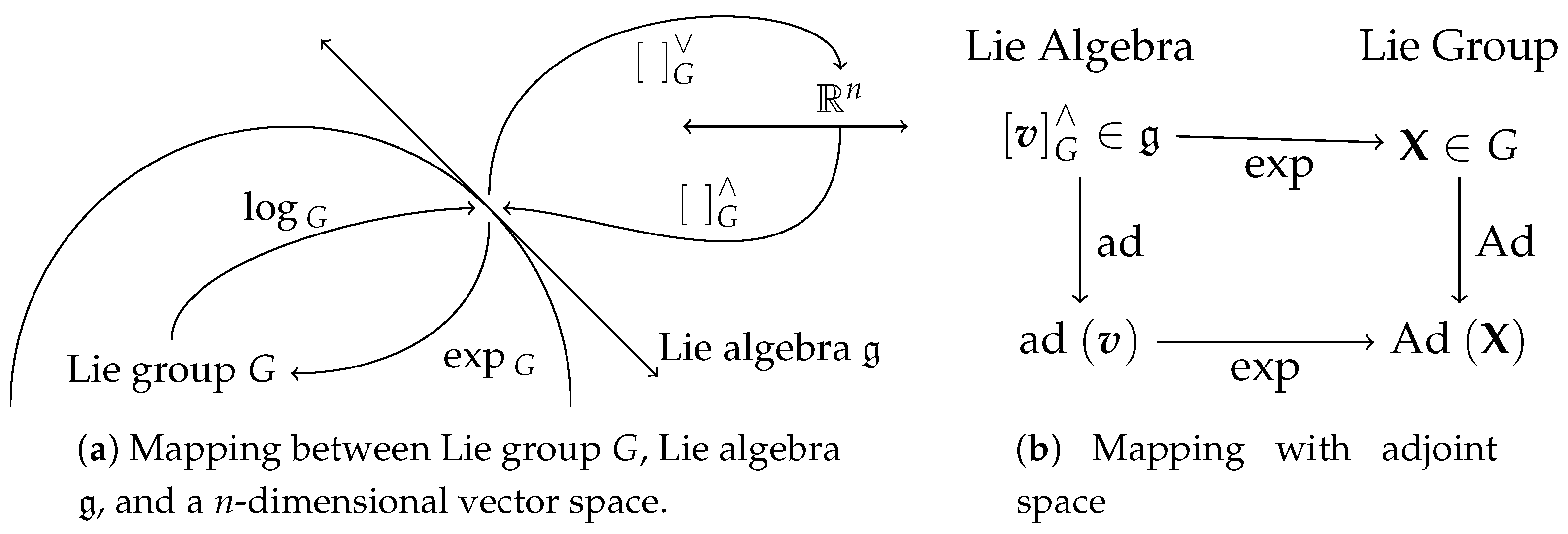
2. Mathematical Background: Lie Group and Lie Algebra
2.1. Special Orthogonal Group
2.2. Special Euclidean Group,
2.3. Real Numbers
3. Algorithm Description
3.1. System, Measurement, and Constraint Models
3.2. Lie Group Constrained EKF (LG-CEKF)
3.2.1. Prediction Step

3.2.2. Measurement Update
Orientation Update
Pelvis Height Assumption

Zero Velocity Update and Flat Floor Assumption

Left and Right Ankle Distance Measurement


Pelvis-to-Ankle Distance Measurement

Covariance Limiter

3.2.3. Satisfying Biomechanical Constraints
Thigh Length Constraint

Hinge Knee Joint Constraint


Knee Range of Motion Constraint

3.3. Post-Processing
 =
=  , where . The orientation of the right thigh, , is calculated similarly.
, where . The orientation of the right thigh, , is calculated similarly.4. Experiment
5. Results
5.1. Mean Position and Orientation RMSE, Joint Angle RMSE and CC
5.2. Hip and Knee Joint Angle RMSE and CC
5.3. Spatiotemporal Gait Parameters
6. Discussion
6.1. Mean Position and Orientation RMSE
6.2. Hip and Knee Joint Angle RMSE and CC
6.3. Spatiotemporal Gait Parameters
6.4. Limitations and Future Work
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| OMC | Optical Motion Capture |
| IMC | Inertial Motion Capture |
| IMU | Inertial Measurement Unit |
| OSPS | One Sensor per Body Segment |
| RSC | Reduced-Sensor-Count |
| KF | Kalman Filter |
| EKF | Extended Kalman Filter |
| CEKF | Constrained Extended Kalman Filter |
| ADL | Activities of Daily Living |
| TTD | Total Travelled Distance |
| SOP | Sparse Orientation Poser |
| SIP | Sparse Inertial Poser |
Appendix A. Derivation of Pelvis-to-Ankle Distance Measurement
References
- Merriaux, P.; Dupuis, Y.; Boutteau, R.; Vasseur, P.; Savatier, X. A Study of Vicon System Positioning Performance. Sensors 2017, 17, 1591. [Google Scholar] [CrossRef] [PubMed]
- Glowinski, S.; Łosiński, K.; Kowiański, P.; Waśkow, M.; Bryndal, A.; Grochulska, A. Inertial sensors as a tool for diagnosing discopathy lumbosacral pathologic gait: A preliminary research. Diagnostics 2020, 10, 342. [Google Scholar] [CrossRef] [PubMed]
- Rovini, E.; Maremmani, C.; Cavallo, F. A wearable system to objectify assessment of motor tasks for supporting parkinson’s disease diagnosis. Sensors 2020, 20, 2630. [Google Scholar] [CrossRef] [PubMed]
- Lloréns, R.; Gil-Gómez, J.A.; Alcañiz, M.; Colomer, C.; Noé, E. Improvement in balance using a virtual reality-based stepping exercise: A randomized controlled trial involving individuals with chronic stroke. Clin. Rehabil. 2015, 29, 261–268. [Google Scholar] [CrossRef] [Green Version]
- Shull, P.; Lurie, K.; Shin, M.; Besier, T.; Cutkosky, M. Haptic gait retraining for knee osteoarthritis treatment. In Proceedings of the 2010 IEEE Haptics Symposium, Waltham, MA, USA, 25–26 March 2010; pp. 409–416. [Google Scholar]
- Roetenberg, D.; Luinge, H.; Slycke, P. Xsens MVN: Full 6DOF human motion tracking using miniature inertial sensors. Xsens Motion Technologies BV Tech. Rep. 2009, 3, 1–9. [Google Scholar]
- Tadano, S.; Takeda, R.; Miyagawa, H. Three dimensional gait analysis using wearable acceleration and gyro sensors based on quaternion calculations. Sensors 2013, 13, 9321–9343. [Google Scholar] [CrossRef] [PubMed]
- Yoon, P.K.; Zihajehzadeh, S.; Kang, B.S.; Park, E.J. Robust Biomechanical Model-Based 3-D Indoor Localization and Tracking Method Using UWB and IMU. IEEE Sens. J. 2017, 17, 1084–1096. [Google Scholar] [CrossRef]
- Meng, X.L.; Zhang, Z.Q.; Sun, S.Y.; Wu, J.K.; Wong, W.C. Biomechanical model-based displacement estimation in micro-sensor motion capture. Meas. Sci. Technol. 2012, 23, 055101. [Google Scholar] [CrossRef]
- Del Rosario, M.B.; Lovell, N.H.; Redmond, S.J. Quaternion-based complementary filter for attitude determination of a smartphone. IEEE Sens. J. 2016, 16, 6008–6017. [Google Scholar] [CrossRef]
- Del Rosario, M.B.; Khamis, H.; Ngo, P.; Lovell, N.H.; Redmond, S.J. Computationally efficient adaptive error-state Kalman filter for attitude estimation. IEEE Sens. J. 2018, 18, 9332–9342. [Google Scholar] [CrossRef]
- Tautges, J.; Zinke, A.; Krüger, B.; Baumann, J.; Weber, A.; Helten, T.; Müller, M.; Seidel, H.; Eberhardt, B. Motion reconstruction using sparse accelerometer data. ACM Trans. Graph. (TOG) 2011, 30, 18. [Google Scholar] [CrossRef]
- Huang, Y.; Kaufmann, M.; Aksan, E.; Black, M.J.; Hilliges, O.; Pons-Moll, G. Deep inertial poser: Learning to reconstruct human pose from sparse inertial measurements in real time. In SIGGRAPH Asia 2018 Technical Papers, Tokyo, Japan; Association for Computing Machinery, Inc.: New York, NY, USA, 2018. [Google Scholar]
- Salarian, A.; Burkhard, P.R.; Vingerhoets, F.J.G.; Jolles, B.M.; Aminian, K. A novel approach to reducing number of sensing units for wearable gait analysis systems. IEEE Trans. Biomed. Eng. 2013, 60, 72–77. [Google Scholar] [CrossRef] [PubMed]
- Sy, L.W.; Raitor, M.; Del Rosario, M.B.; Khamis, H.; Kark, L.; Lovell, N.H.; Redmond, S.J. Estimating lower limb kinematics using a reduced wearable sensor count. IEEE Trans. Biomed. Eng. 2020, in press. [Google Scholar] [CrossRef] [PubMed]
- Lin, J.F.; Kulić, D. Human pose recovery using wireless inertial measurement units. Physiol. Meas. 2012, 33, 2099–2115. [Google Scholar] [CrossRef]
- von Marcard, T.; Rosenhahn, B.; Black, M.J.; Pons-Moll, G. Sparse inertial poser: Automatic 3D human pose estimation from sparse IMUs. In Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 2017; Volume 36, pp. 349–360. [Google Scholar]
- Barfoot, T.D. State Estimation for Robotics; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- Wang, Y.; Chirikjian, G.S. Error propagation on the Euclidean group with applications to manipulator kinematics. IEEE Trans. Robot. 2006, 22, 591–602. [Google Scholar] [CrossRef]
- Barfoot, T.D.; Furgale, P.T. Associating uncertainty with three-dimensional poses for use in estimation problems. IEEE Trans. Robot. 2014, 30, 679–693. [Google Scholar] [CrossRef]
- Bourmaud, G.; Mégret, R.; Arnaudon, M.; Giremus, A. Continuous-discrete extended Kalman filter on matrix Lie groups using concentrated Gaussian distributions. J. Math. Imaging Vis. 2014, 51, 209–228. [Google Scholar] [CrossRef] [Green Version]
- Brossard, M.; Bonnabel, S.; Condomines, J.P. Unscented Kalman filtering on Lie groups. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017; pp. 2485–2491. [Google Scholar]
- Ćesić, J.; Joukov, V.; Petrović, I.; Kulić, D. Full body human motion estimation on lie groups using 3D marker position measurements. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Cancun, Mexico, 15–17 November 2016; pp. 826–833. [Google Scholar]
- Joukov, V.; Cesic, J.; Westermann, K.; Markovic, I.; Petrovic, I.; Kulic, D. Estimation and observability analysis of human motion on Lie groups. IEEE Trans. Cybern. 2019, 50, 1–12. [Google Scholar] [CrossRef]
- Joukov, V.; Cesic, J.; Westermann, K.; Markovic, I.; Kulic, D.; Petrovic, I. Human motion estimation on Lie groups using IMU measurements. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017; pp. 1965–1972. [Google Scholar]
- Hol, J.D.; Dijkstra, F.; Luinge, H.; Schon, T.B. Tightly coupled UWB/IMU pose estimation. In Proceedings of the 2009 IEEE International Conference on Ultra-Wideband, Vancouver, BC, Canada, 9–11 September 2009; pp. 688–692. [Google Scholar]
- Malleson, C.; Gilbert, A.; Trumble, M.; Collomosse, J.; Hilton, A. Real-time full-body motion capture from video and IMUs. In Proceedings of the International Conference on 3D Vision (3DV), Qingdao, China, 10–12 October 2017. [Google Scholar]
- Gilbert, A.; Trumble, M.; Malleson, C.; Hilton, A.; Collomosse, J. Fusing visual and inertial sensors with semantics for 3D human pose estimation. Int. J. Comput. Vis. 2019, 127, 381–397. [Google Scholar] [CrossRef] [Green Version]
- Helten, T.; Muller, M.; Seidel, H.P.; Theobalt, C. Real-time body tracking with one depth camera and inertial sensors. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, Australia, 8–12 April 2013; pp. 1105–1112. [Google Scholar]
- Vlasic, D.; Adelsberger, R.; Vannucci, G.; Barnwell, J.; Gross, M.; Matusik, W.; Popović, J. Practical motion capture in everyday surroundings. ACM Trans. Graph. (TOG) 2007, 26, 35. [Google Scholar] [CrossRef]
- Sy, L.; Lovell, N.H.; Redmond, S.J. Estimating lower limb kinematics using distance measurements with a reduced wearable inertial sensor count. In Proceedings of the 2020 42nd Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Montreal, QC, Canada, 20–24 July 2020. [Google Scholar]
- Sy, L.; Lovell, N.H.; Redmond, S.J. Estimating lower limb kinematics using a Lie group constrained EKF and a reduced wearable IMU count. In Proceedings of the 2020 8th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), New York, NY, USA, 29 November–1 December 2020. [Google Scholar]
- Selig, J.M. Lie groups and Lie algebras in robotics. In Computational Noncommutative Algebra and Applications; Springer: Berlin/Heidelberg, Germany, 2004; pp. 101–125. [Google Scholar]
- Stillwell, J. Naive Lie Theory; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Chirikjian, G. Stochastic Models, Information Theory, and Lie Groups. II: Analytic Methods and Modern Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Bourmaud, G.; Megret, R.; Giremus, A.; Berthoumieu, Y. Discrete extended Kalman filter on Lie groups. In Proceedings of the European Signal Processing Conference, Marrakech, Morocco, 9–13 September 2013; pp. 1–5. [Google Scholar]
- Cloete, T.; Scheffer, C. Benchmarking of a full-body inertial motion capture system for clinical gait analysis. In Proceedings of the 2008 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Vancouver, BC, Canada, 20–25 August 2008; pp. 4579–4582. [Google Scholar]
- Hu, X.; Yao, C.; Soh, G.S. Performance evaluation of lower limb ambulatory measurement using reduced inertial measurement units and 3R gait model. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, Singapore, 11–14 August 2015; pp. 549–554. [Google Scholar]
- Malajner, M.; Planinsic, P.; Gleich, D. UWB ranging accuracy. In Proceedings of the 2015 22nd International Conference on Systems, Signals and Image Processing, London, UK, 10–12 September 2015; pp. 61–64. [Google Scholar]
- Ledergerber, A.; D’Andrea, R. Ultra-wideband range measurement model with Gaussian processes. In Proceedings of the 1st Annual IEEE Conference on Control Technology and Applications, Hawaii, HI, USA, 27–30 August 2017; pp. 1929–1934. [Google Scholar]
- McGinley, J.L.; Baker, R.; Wolfe, R.; Morris, M.E. The reliability of three-dimensional kinematic gait measurements: A systematic review. Gait Posture 2009, 29, 360–369. [Google Scholar] [CrossRef]
- Jimenez, A.R.; Seco, F.; Prieto, J.C.; Guevara, J. Indoor Pedestrian navigation using an INS/EKF framework for yaw drift reduction and a foot-mounted IMU. In Proceedings of the 2010 7th Workshop on Positioning, Navigation and Communication, Dresden, Germany, 11–12 March 2010; pp. 135–143. [Google Scholar]
- Zhang, W.; Li, X.; Wei, D.; Ji, X.; Yuan, H. A foot-mounted PDR System Based on IMU/EKF+HMM+ ZUPT+ZARU+HDR+compass algorithm. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation, Sapporo, Japan, 18–21 September 2017; pp. 1–5. [Google Scholar]
- Dotlic, I.; Connell, A.; Ma, H.; Clancy, J.; McLaughlin, M. Angle of arrival estimation using decawave DW1000 integrated circuits. In Proceedings of the 2017 14th Workshop on Positioning, Navigation and Communications, Bremen, Germany, 25–26 October 2017; pp. 1–6. [Google Scholar]
- Xu, W.; Chatterjee, A.; Zollh, M.; Rhodin, H.; Fua, P.; Seidel, H.p.; Theobalt, C. Mo2Cap2: Real-time mobile 3D motion capture with a cap-mounted fisheye camera. IEEE Trans. Vis. Comput. Graph. 2019, 25, 2093–2101. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Laidig, D.; Schauer, T.; Seel, T. Exploiting kinematic constraints to compensate magnetic disturbances when calculating joint angles of approximate hinge joints from orientation estimates of inertial sensors. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, London, UK, 17–20 July 2017; pp. 971–976. [Google Scholar]
- Eckhoff, K.; Kok, M.; Lucia, S.; Seel, T. Sparse magnetometer-free inertial motion tracking—A condition for observability in double hinge joint systems. arXiv 2020, arXiv:2002.00902. [Google Scholar]
- de Vries, W.H.; Veeger, H.E.; Baten, C.T.; van der Helm, F.C. Magnetic distortion in motion labs, implications for validating inertial magnetic sensors. Gait Posture 2009, 29, 535–541. [Google Scholar] [CrossRef] [PubMed]
- Li, T.; Wang, L.; Li, Q.; Liu, T. Lower-body walking motion estimation using only two shank-mounted inertial measurement units (IMUs). In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Boston, MA, USA, 6–9 July 2020; pp. 1143–1148. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Movement | Description | Duration | Group |
|---|---|---|---|
| Walk | Walk straight and return | ∼30 s | F |
| Figure-of-eight | Walk along figure-of-eight path | ∼60 s | F |
| Zig-zag | Walk along zig-zag path | ∼60 s | F |
| 5-minute walk | Unscripted walk and stand | ∼300 s | F |
| Speedskater | Speedskater on the spot | ∼30 s | D |
| TUG | Timed up-and-go test | ∼30 s | D |
| Jog | Jog straight and return | ∼30 s | D |
| Jumping jacks | Jumping jacks on the spot | ∼30 s | D |
| High-knee jog | High-knee jog on the spot | ∼30 s | D |
| Parameters | Parameters | ||||||
|---|---|---|---|---|---|---|---|
| and | and | ||||||
| (m·s) | (rad·s) | (rad) | (m) | (m·s and m) | (m) | (m) | (m) |
| 10 | 1 | ||||||
| Algorithm | Inter-IMU Distance | Summary Description |
|---|---|---|
| L5S-3IMU | N | Tracks position and orientation as described in Section 3 with parameters listed in Table 2. |
| L5S-3IMU+D | Y | |
| CKF-3IMU [15] | N | Only tracks position using a constrained KF. |
| CKF-3IMU+D [31] | Y | |
| CKF-3I-KB | N | Modified CKF-3IMU using similar parameters as L5S-3IMU (Table 2). This also allows knee bending during the constraint update. |
| CKF-3I-KB+D | Y | |
| L5S-3I-NO | N | L5S-3IMU with parameters that assume noise-free orientation (NO) measurements like CKF-3IMU. |
| L5S-3I-NO+D | Y | |
| OSPS | N | Output from a commercial OSPS wearable IMC system. |
| Algo. | Side | TTD | Stride Length (cm) | Gait Speed (cm.s ) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Error | Actual | Error | Actual | Error | ||||||
| % dev | med | ± | RMS | med | ± | RMS | ||||
| Freewalk | L | 8.97% | 91 | 99 | 9.9 | 70 | 74 | 7.7 | ||
| L5S-3IMU | R | 9.00% | 93 | 99 | 10.3 | 71 | 75 | 8.2 | ||
| Freewalk | L | 5.23% | 91 | 99 | 8.3 | 70 | 74 | 6.6 | ||
| L5S-3IMU+D | R | 5.85% | 93 | 99 | 9.4 | 71 | 75 | 7.4 | ||
| Jog | L | 21.35% | 81 | 86 | 28.5 | 107 | 118 | 38.0 | ||
| L5S-3IMU | R | 26.79% | 85 | 97 | 33.8 | 111 | 124 | 43.1 | ||
| Jog | L | 22.40% | 81 | 86 | 28.4 | 107 | 118 | 37.0 | ||
| L5S-3IMU+D | R | 26.70% | 85 | 97 | 32.8 | 111 | 124 | 41.4 | ||
| TUG | L | 18.20% | 74 | 76 | 22.1 | 58 | 60 | 18.0 | ||
| L5S-3IMU | R | 20.98% | 79 | 90 | 22.5 | 63 | 67 | 18.4 | ||
| ine TUG | L | 3.80% | 74 | 76 | 6.7 | 58 | 60 | 5.9 | ||
| L5S-3IMU+D | R | 4.22% | 79 | 90 | 6.8 | 63 | 67 | 5.6 | ||
| (cm) | , No Bias (cm) | |||||
|---|---|---|---|---|---|---|
| Free Walk | Jog | Jumping Jacks | Free Walk | Jog | Jumping Jacks | |
| L5S-3I | ||||||
| L5S-3I+D | ||||||
| OSPS | ||||||
| SOP [17] | ∼ | ∼ | ∼ | ∼ | ∼ | ∼ |
| SIP [17] | ∼ | ∼ | ∼ | ∼ | ∼ | ∼ |
| Joint Angle RMSE () | Knee Sagittal | Hip Sagittal | Hip Frontal | Hip Transverse |
|---|---|---|---|---|
| L5S-3IMU | ||||
| L5S-3IMU+D | ||||
| OSPS | ||||
| CKF-3IMU [15] | ||||
| Cloete et al. [37] | ||||
| Hu et al. [38] | - | - | ||
| Tadano et al. [7] | - | - | ||
| Joint Angle CC | Knee Sagittal | Hip Sagittal | Hip Frontal | Hip Transverse |
| L5S-3IMU | ||||
| L5S-3IMU+D | ||||
| OSPS | ||||
| CKF-3IMU [15] | ||||
| Cloete et al. [37] | ||||
| Hu et al. [38] | - | - | ||
| Tadano et al. [7] | - | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sy, L.W.F.; Lovell, N.H.; Redmond, S.J. Estimating Lower Limb Kinematics Using a Lie Group Constrained Extended Kalman Filter with a Reduced Wearable IMU Count and Distance Measurements. Sensors 2020, 20, 6829. https://doi.org/10.3390/s20236829
Sy LWF, Lovell NH, Redmond SJ. Estimating Lower Limb Kinematics Using a Lie Group Constrained Extended Kalman Filter with a Reduced Wearable IMU Count and Distance Measurements. Sensors. 2020; 20(23):6829. https://doi.org/10.3390/s20236829
Chicago/Turabian StyleSy, Luke Wicent F., Nigel H. Lovell, and Stephen J. Redmond. 2020. "Estimating Lower Limb Kinematics Using a Lie Group Constrained Extended Kalman Filter with a Reduced Wearable IMU Count and Distance Measurements" Sensors 20, no. 23: 6829. https://doi.org/10.3390/s20236829