Setup, Test and Validation of a UHF RFID System for Monitoring Feeding Behaviour of Dairy Cows


Abstract
:1. Introduction
2. Materials and Methods
2.1. Experiment 1: Setup and Test of the UHF RFID System
2.1.1. UHF RFID Equipment
2.1.2. Installation of the UHF RFID Antenna
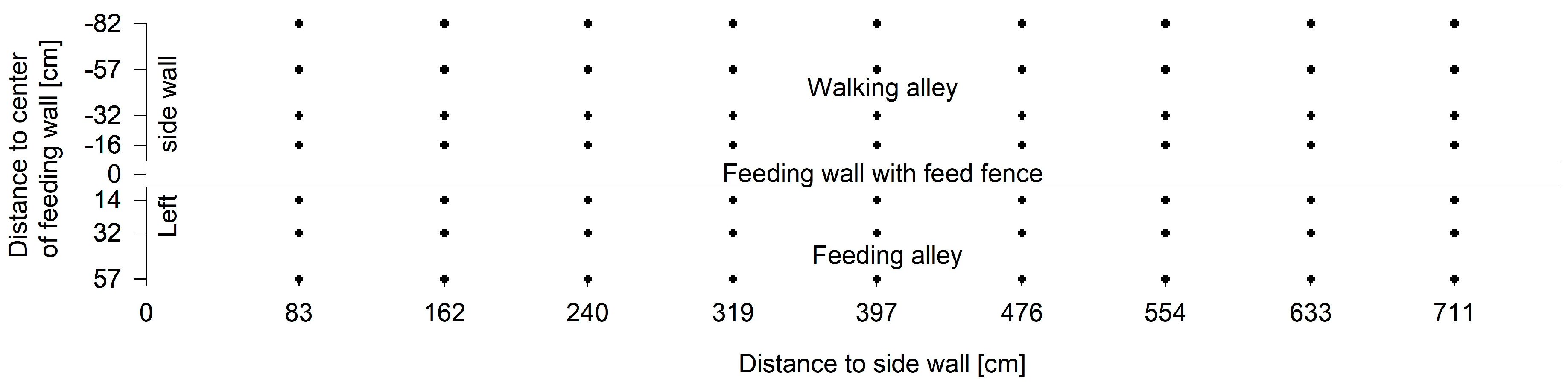
2.1.3. Measurements of the Reading Area
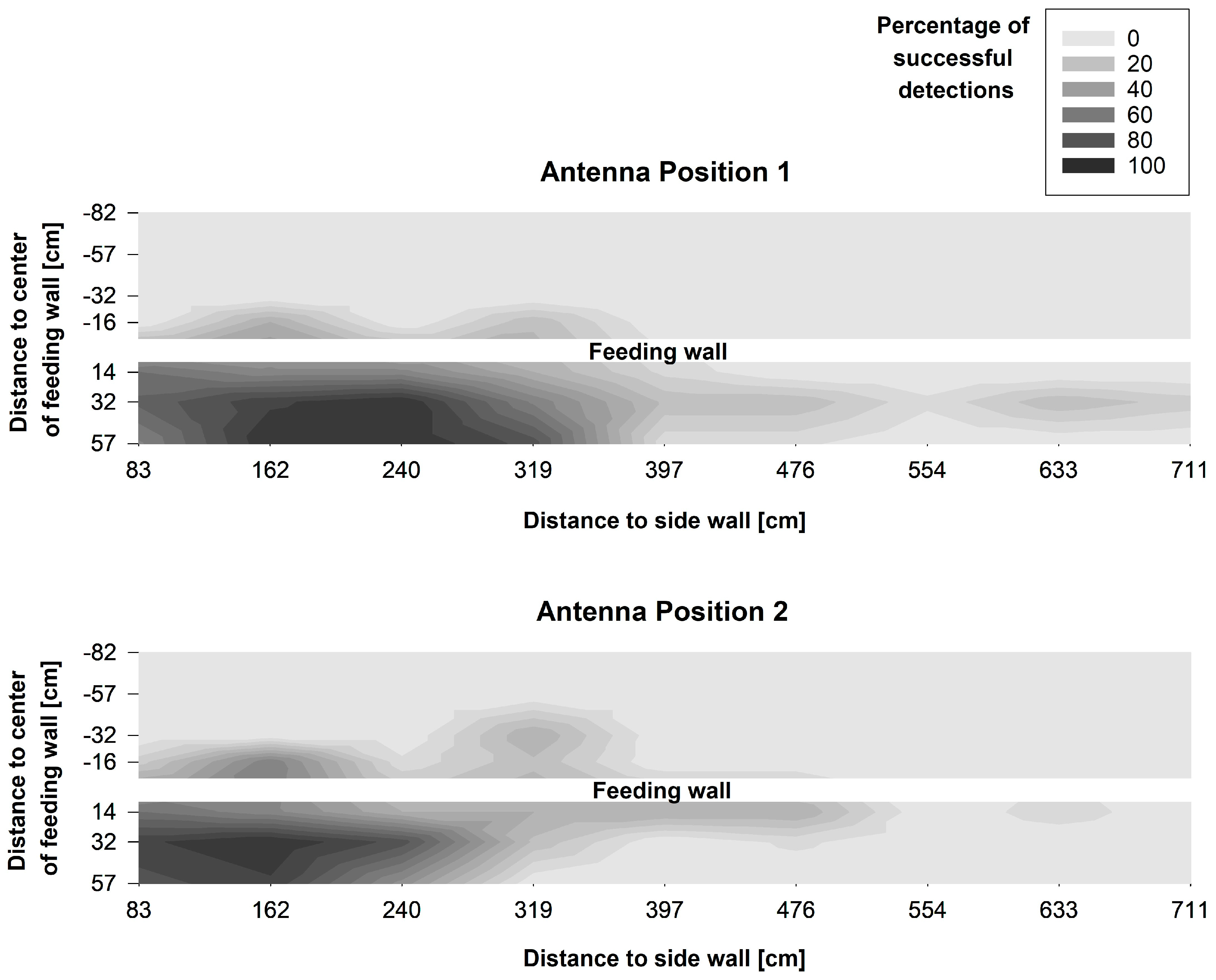
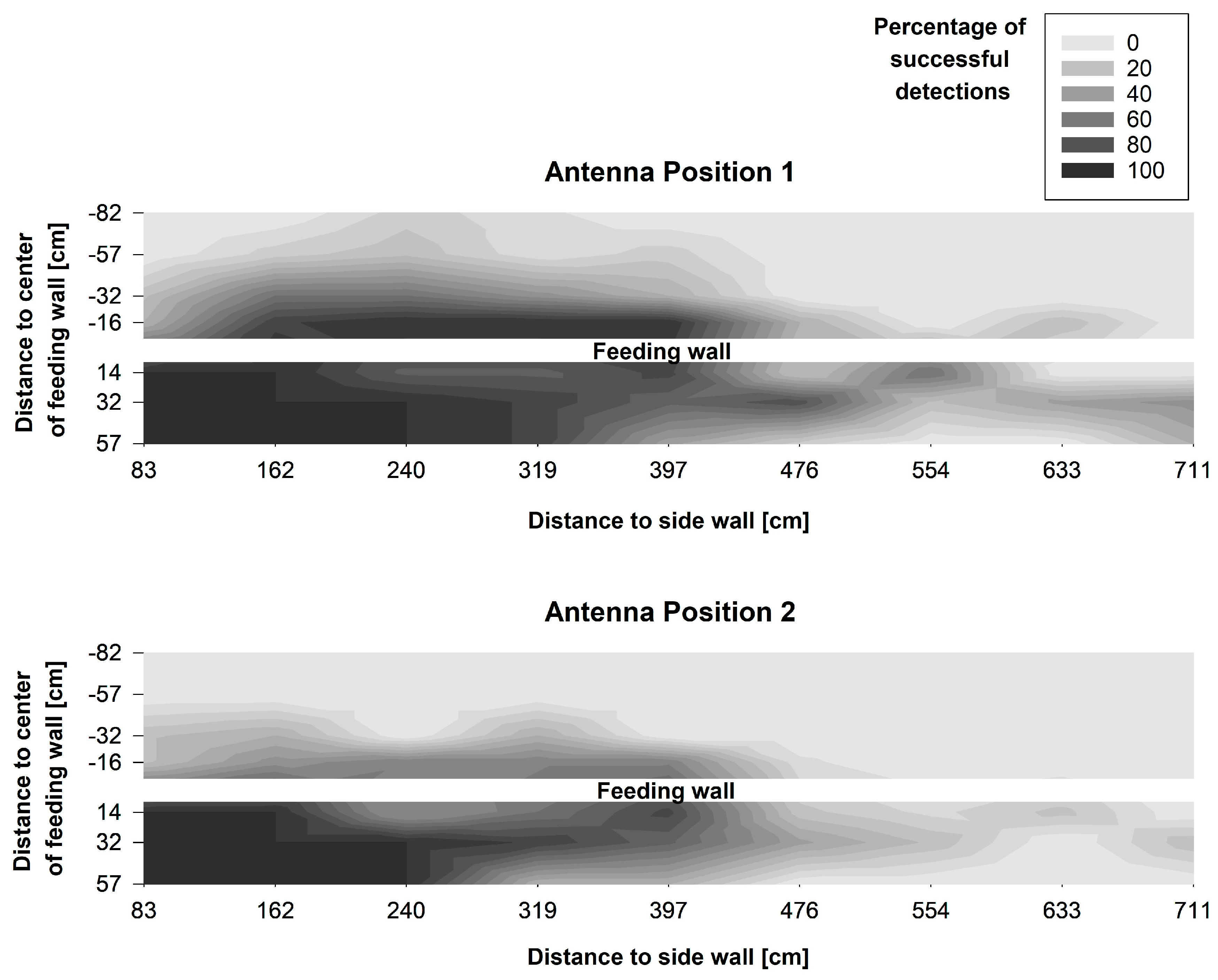
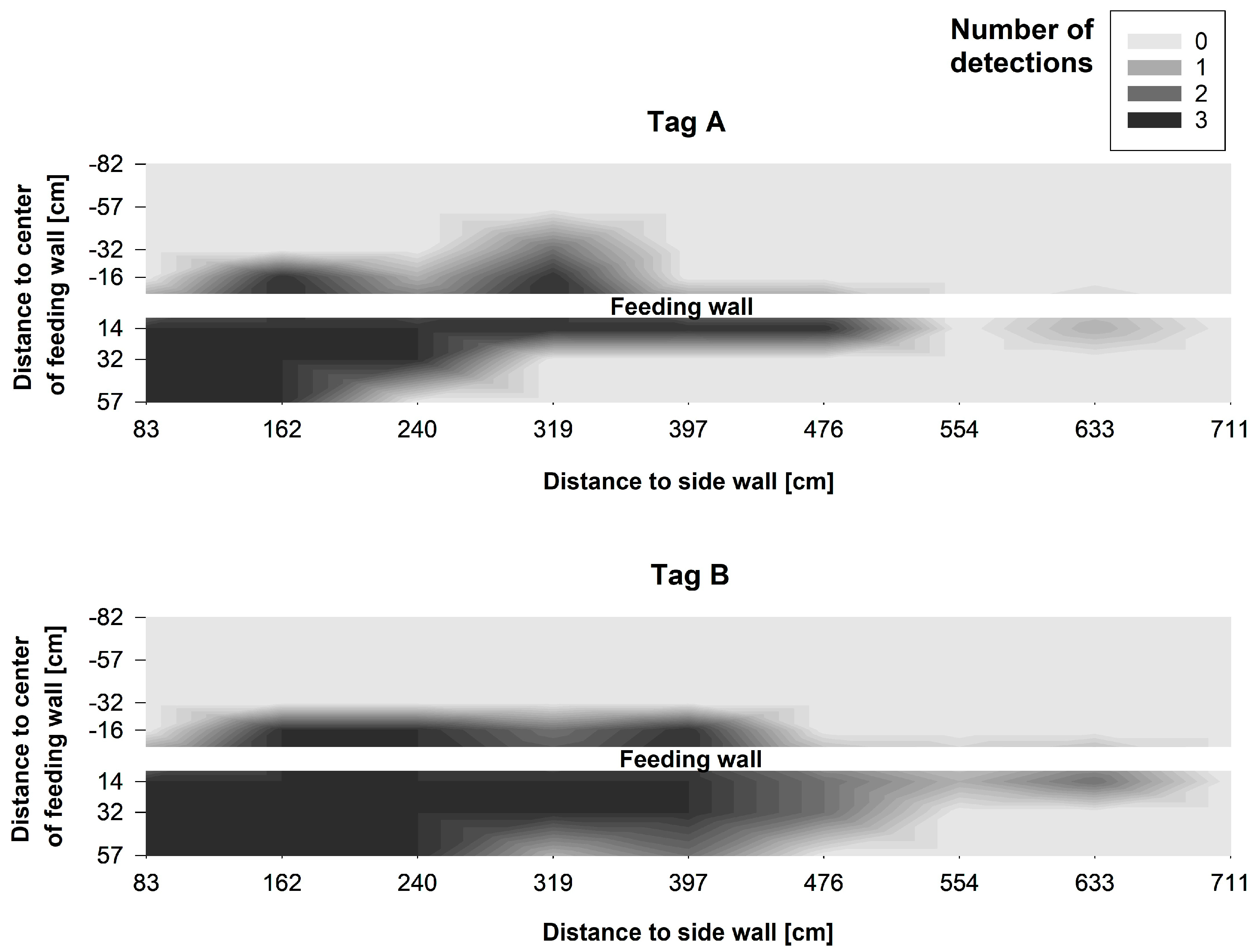
2.1.4. Visualisation of the Reading Area
2.2. Experiment 2: Validation of the UHF RFID System and Comparison to Two other Sensor Systems
2.2.1. Installation and Technical Setup of the Complete UHF RFID System
2.2.2. Systems for Validation and Comparison of the UHF RFID System
2.2.3. Validation Experiment with Dairy Cows
2.2.4. Data Preparation and Analysis
- ▪
- Positives (P): s during which a cow was observed in the target area.
- ▪
- Negatives (N): s during which a cow was not observed in the target area.
- ▪
- True positives (TP): positives which were part of an RFID event of the same cow.
- ▪
- False positives (FP): negatives which were part of an RFID event of the same cow.
- ▪
- True negatives (TN): negatives which were not part of an RFID event of the same cow.
- ▪
- False negatives (FN): positives which were not part of an RFID event of the same cow.
3. Results
3.1. Experiment 1: Setup and Test of the UHF RFID System
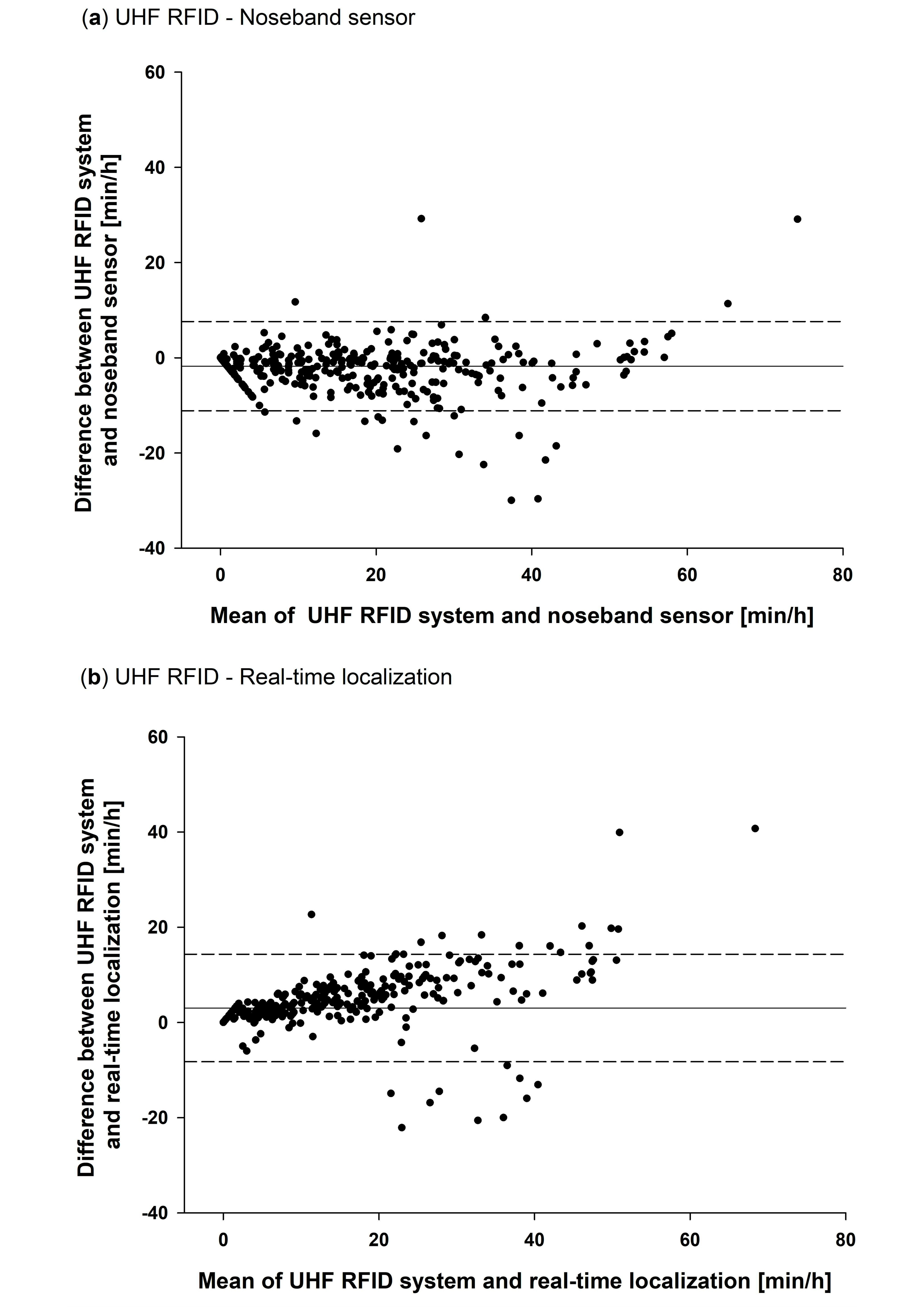
3.2. Experiment 2: Validation of the UHF RFID System and Comparison to Two other Sensor Systems
4. Discussion
4.1. Experiment 1: Characterisation of the Reading Area and Suitability for the Targeted Application
4.2. Experiment 2: Accuracy and Comparability of the UHF System
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Weary, D.M.; Huzzey, J.M.; Von Keyserlingk, M.A. Board-invited review: Using behavior to predict and identify ill health in animals1. J. Anim. Sci. 2009, 87, 770–777. [Google Scholar] [CrossRef] [Green Version]
- Beauchemin, K.A. Invited review: Current perspectives on eating and rumination activity in dairy cows. J. Dairy Sci. 2018, 101, 4762–4784. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chapinal, N.; Veira, D.; Weary, D.; Von Keyserlingk, M.A.G. Technical note: Validation of a system for monitoring individual feeding and drinking behavior and intake in group-housed cattle. J. Dairy Sci. 2007, 90, 5732–5736. [Google Scholar] [CrossRef] [PubMed]
- Mendes, E.D.M.; E Carstens, G.; Tedeschi, L.O.; Pinchak, W.E.; Friend, T. Validation of a system for monitoring feeding behavior in beef cattle1. J. Anim. Sci. 2011, 89, 2904–2910. [Google Scholar] [CrossRef] [PubMed]
- Zehner, N.; Umstatter, C.; Niederhauser, J.J.; Schick, M. System specification and validation of a noseband pressure sensor for measurement of ruminating and eating behavior in stable-fed cows. Comput. Electron. Agric. 2017, 136, 31–41. [Google Scholar] [CrossRef]
- Grinter, L.; Campler, M.; Costa, J.H.C. Technical note: Validation of a behavior-monitoring collar’s precision and accuracy to measure rumination, feeding, and resting time of lactating dairy cows. J. Dairy Sci. 2019, 102, 3487–3494. [Google Scholar] [CrossRef] [Green Version]
- Reiter, S.; Sattlecker, G.; Lidauer, L.; Kickinger, F.; Öhlschuster, M.; Auer, W.; Schweinzer, V.; Klein-Jöbstl, D.; Drillich, M.; Iwersen, M. Evaluation of an ear-tag-based accelerometer for monitoring rumination in dairy cows. J. Dairy Sci. 2018, 101, 3398–3411. [Google Scholar] [CrossRef] [Green Version]
- Brown-Brandl, T.M.; Eigenberg, R.A. Development of a livestock feeding behavior monitoring system. Trans. ASABE 2011, 54, 1913–1920. [Google Scholar] [CrossRef]
- Maselyne, J.; Saeys, W.; Briene, P.; Mertens, K.; Vangeyte, J.; De Ketelaere, B.; Hessel, E.F.; Sonck, B.; Van Nuffel, A. Methods to construct feeding visits from RFID registrations of growing-finishing pigs at the feed trough. Comput. Electron. Agric. 2016, 128, 9–19. [Google Scholar] [CrossRef]
- Adrion, F.; Kapun, A.; Eckert, F.; Holland, E.-M.; Staiger, M.; Götz, S.; Gallmann, E. Monitoring trough visits of growing-finishing pigs with UHF-RFID. Comput. Electron. Agric. 2018, 144, 144–153. [Google Scholar] [CrossRef]
- Li, L.; Zhao, Y.; Oliveira, J.; Verhoijsen, W.; Liu, K.; Xin, H. A UHF RFID System for studying individual feeding and nesting behaviors of group-housed laying hens. Trans. ASABE 2017, 60, 1337–1347. [Google Scholar] [CrossRef] [Green Version]
- Toaff-Rosenstein, R.L.; Velez, M.; Tucker, C.B. Technical note: Use of an automated grooming brush by heifers and potential for radiofrequency identification-based measurements of this behavior. J. Dairy Sci. 2017, 100, 8430–8437. [Google Scholar] [CrossRef] [PubMed]
- Brown-Brandl, T.M.; Adrion, F.; Maselyne, J.; Kapun, A.; Hessel, E.F.; Saeys, W.; Van Nuffel, A.; Gallmann, E. A review of passive radio frequency identification systems for animal monitoring in livestock facilities. Appl. Eng. Agric. 2019, 35, 579–591. [Google Scholar] [CrossRef]
- Adrion, F.; Kapun, A.; Holland, E.-M.; Staiger, M.; Löb, P.; Gallmann, E. Novel approach to determine the influence of pig and cattle ears on the performance of passive UHF-RFID ear tags. Comput. Electron. Agric. 2017, 140, 168–179. [Google Scholar] [CrossRef]
- Lorenzo, J.; Girbau, D.; Lazaro, A.; Villarino, R. Read range reduction in UHF RFID due to antenna detuning and gain penalty. Microw. Opt. Technol. Lett. 2010, 53, 144–148. [Google Scholar] [CrossRef]
- Griffin, J.D.; Durgin, G.D. Complete link budgets for Backscatter-Radio and RFID systems. IEEE Antennas Propag. Mag. 2009, 51, 11–25. [Google Scholar] [CrossRef]
- Junge, M.; Herd, D.; Jezierny, D.; Gallmann, E.; Jungbluth, T. Indicators for monitoring behavior and health of group housed pregnant sows. Landtechnik 2012, 67, 326–330. [Google Scholar] [CrossRef]
- Maselyne, J.; Adriaens, I.; Huybrechts, T.; De Ketelaere, B.; Millet, S.; Vangeyte, J.; Van Nuffel, A.; Saeys, W. Measuring the drinking behaviour of individual pigs housed in group using radio frequency identification (RFID). Animal 2016, 10, 1557–1566. [Google Scholar] [CrossRef] [Green Version]
- Adrion, F.; Keller, M.; Umstatter, C. Monitoring feeding behaviour of dairy cows using UHF-RFID. In Proceedings of the 9th European Conference on Precision Livestock Farming, Cork, Ireland, 26–29 August 2019; pp. 588–595. [Google Scholar]
- Schrade, S.; Zähner, M.; Poteko, J.; Zeyer, K.; Mohn, J.; Steiner, B.; Keck, M. Experimental dairy housing for comparative emission measurements. In Proceedings of the 25th International Scientifc Symposium on Nutrition of Farm Animals, Zadravec-Erjavec Days 2016, Radenci, Slowenia, 10–11 November 2016; pp. 185–189. [Google Scholar]
- Wolfger, B.; Jones, B.; Orsel, K.; Bewley, J. Technical note: Evaluation of an ear-attached real-time location monitoring system. J. Dairy Sci. 2017, 100, 2219–2224. [Google Scholar] [CrossRef]
- Bakdash, J.Z.; Marusich, L.R. Repeated measures correlation. Front. Psychol. 2017, 8, 456. [Google Scholar] [CrossRef] [Green Version]
- Bland, J.M.; Altman, D. Statistical methods for assessing agreement between two methods of clinical measurement. Lancet 1986, 327, 307–310. [Google Scholar] [CrossRef]
- Derbek, V.; Steger, C.; Weiss, R.; Preishuber-Pflügl, J.; Pistauer, M. A UHF RFID measurement and evaluation test system. Elektrotechnik und Informationstechnik 2007, 124, 384–390. [Google Scholar] [CrossRef]
- Adrion, F.; Hammer, N.; Rößler, B.; Jezierny, D.; Kapun, A.; Gallmann, E. Development, function and test of a static test bench for UHF-RFID ear tags. Landtechnik 2015, 70, 46–66. [Google Scholar] [CrossRef]
- Maselyne, J.; Saeys, W.; De Ketelaere, B.; Mertens, K.; Vangeyte, J.; Hessel, E.F.; Millet, S.; Van Nuffel, A. Validation of a High Frequency Radio Frequency Identification (HF RFID) system for registering feeding patterns of growing-finishing pigs. Comput. Electron. Agric. 2014, 102, 10–18. [Google Scholar] [CrossRef] [Green Version]
- Mattachini, G.; Riva, E.; Perazzolo, F.; Naldi, E.; Provolo, G. Monitoring feeding behaviour of dairy cows using accelerometers. J. Agric. Eng. 2016, 47, 54–58. [Google Scholar] [CrossRef] [Green Version]
- Endres, M.; Devries, T.; Von Keyserlingk, M.A.G.; Weary, D. Short communication: Effect of feed barrier design on the behavior of loose-housed lactating dairy cows. J. Dairy Sci. 2005, 88, 2377–2380. [Google Scholar] [CrossRef]
- Griffin, J.D.; Durgin, G.D.; Haldi, A.; Kippelen, B. RF tag antenna performance on various materials using radio link budgets. IEEE Antennas Wirel. Propag. Lett. 2006, 5, 247–250. [Google Scholar] [CrossRef]
- Brown-Brandl, T.; Adrion, F.; Gallmann, E.; Eigenberg, R. Development and validation of a low-frequency RFID system for monitoring grow-finish pig feeding and drinking behavior. In Proceedings of the 10th International Livestock Environment Symposium (ILES X), Omaha, NE, USA, 25–27 September 2018; American Society of Agricultural and Biological Engineers (ASABE): Omaha, NE, USA, 2018. [Google Scholar] [CrossRef]
- Dardari, D.; DeCarli, N.; Guerra, A.; Guidi, F. The future of ultra-wideband localization in RFID. In Proceedings of the 2016 IEEE International Conference on RFID (RFID), Orlando, FL, USA, 3–5 May 2016; IEEE: Orlando, FL, USA, 2016; pp. 1–7. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Video Data | Bout Criterion (s) | Tag Type | Sensitivity (%) | Specificity (%) | Precision (%) | Accuracy (%) | False Positives | False Negatives |
|---|---|---|---|---|---|---|---|---|
| Head up + down | 180 | A + B | 93.7 ± 5.6 | 97.8 ± 1.1 | 93.8 ± 2.3 | 96.9 ± 0.9 | 5778 | 5110 |
| A | 95.7 ± 3.7 | 97.5 ± 1.0 | 93.3 ± 1.5 | 97.2 ± 0.8 | 3247 | 1765 | ||
| B | 91.7 ± 6.8 | 98.1 ± 1.2 | 94.3 ± 2.8 | 96.7 ± 0.8 | 2531 | 3345 | ||
| Head down | 120 | A + B | 92.5 ± 5.2 | 92.1 ± 2.8 | 73.8 ± 5.7 | 92.3 ± 2.1 | 22,751 | 4690 |
| A | 94.3 ± 3.5 | 91.1 ± 3.2 | 72.7 ± 5.9 | 91.8 ± 2.5 | 12,713 | 1853 | ||
| B | 90.6 ± 6.3 | 93.0 ± 2.1 | 74.9 ± 5.9 | 92.8 ± 1.9 | 10,038 | 2837 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Adrion, F.; Keller, M.; Bozzolini, G.B.; Umstatter, C. Setup, Test and Validation of a UHF RFID System for Monitoring Feeding Behaviour of Dairy Cows. Sensors 2020, 20, 7035. https://doi.org/10.3390/s20247035
Adrion F, Keller M, Bozzolini GB, Umstatter C. Setup, Test and Validation of a UHF RFID System for Monitoring Feeding Behaviour of Dairy Cows. Sensors. 2020; 20(24):7035. https://doi.org/10.3390/s20247035
Chicago/Turabian StyleAdrion, Felix, Markus Keller, Giulia Bianca Bozzolini, and Christina Umstatter. 2020. "Setup, Test and Validation of a UHF RFID System for Monitoring Feeding Behaviour of Dairy Cows" Sensors 20, no. 24: 7035. https://doi.org/10.3390/s20247035
APA StyleAdrion, F., Keller, M., Bozzolini, G. B., & Umstatter, C. (2020). Setup, Test and Validation of a UHF RFID System for Monitoring Feeding Behaviour of Dairy Cows. Sensors, 20(24), 7035. https://doi.org/10.3390/s20247035