Joint Timekeeping of Navigation Satellite Constellation with Inter-Satellite Links

Abstract
:1. Introduction
2. Joint Timekeeping Framework
2.1. Traceability by Prediction
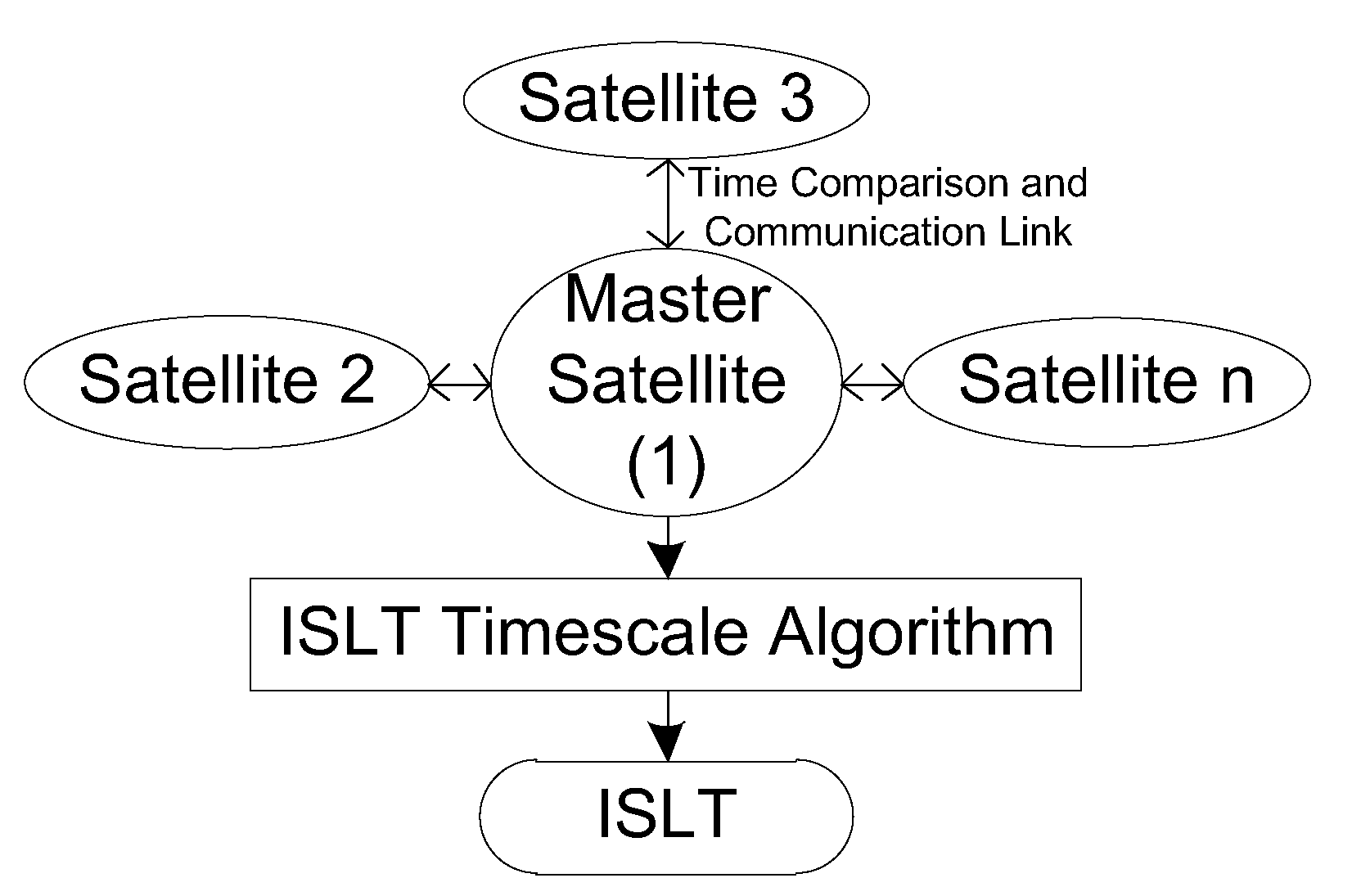
2.2. Establishment of ISLT
3. ISLT Timescale Algorithm
3.1. Basic ISLT Timescale Equation
3.2. Inter-Satellite Time Comparison
3.3. Short-Term Prediction of Clock Deviation
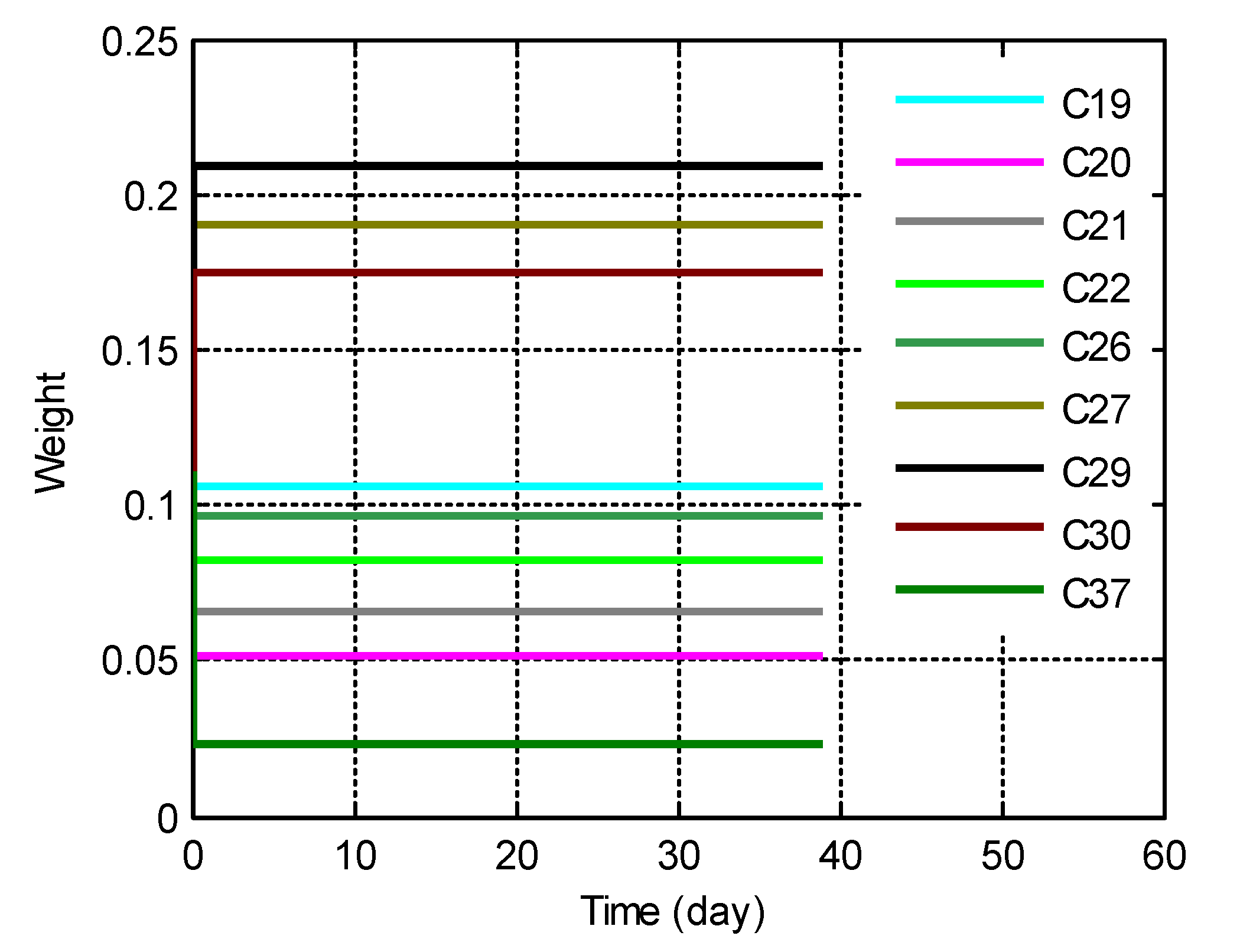
3.4. Optimal Weights
4. Performance Evaluation of ISLT
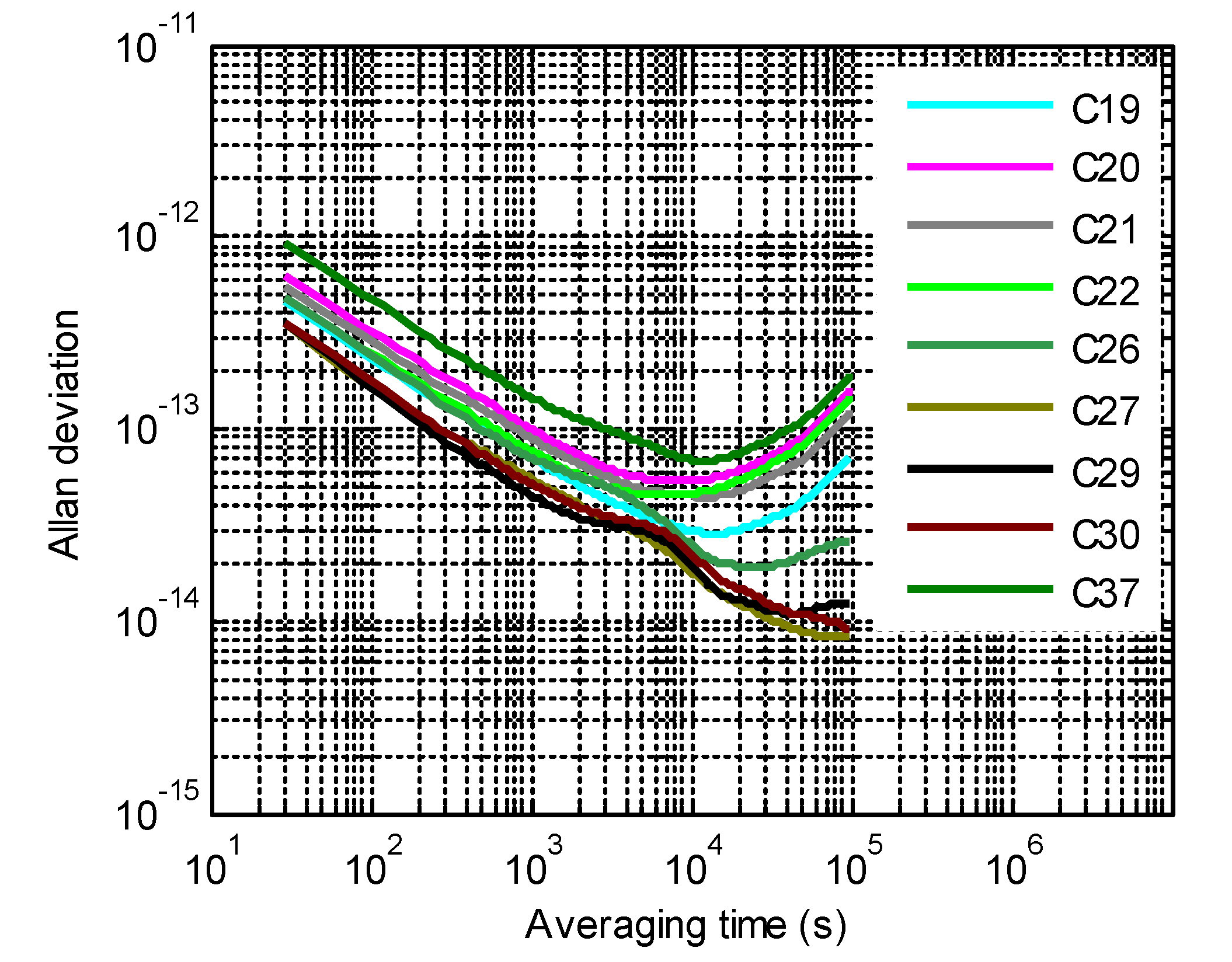
4.1. Clock Noise Identification
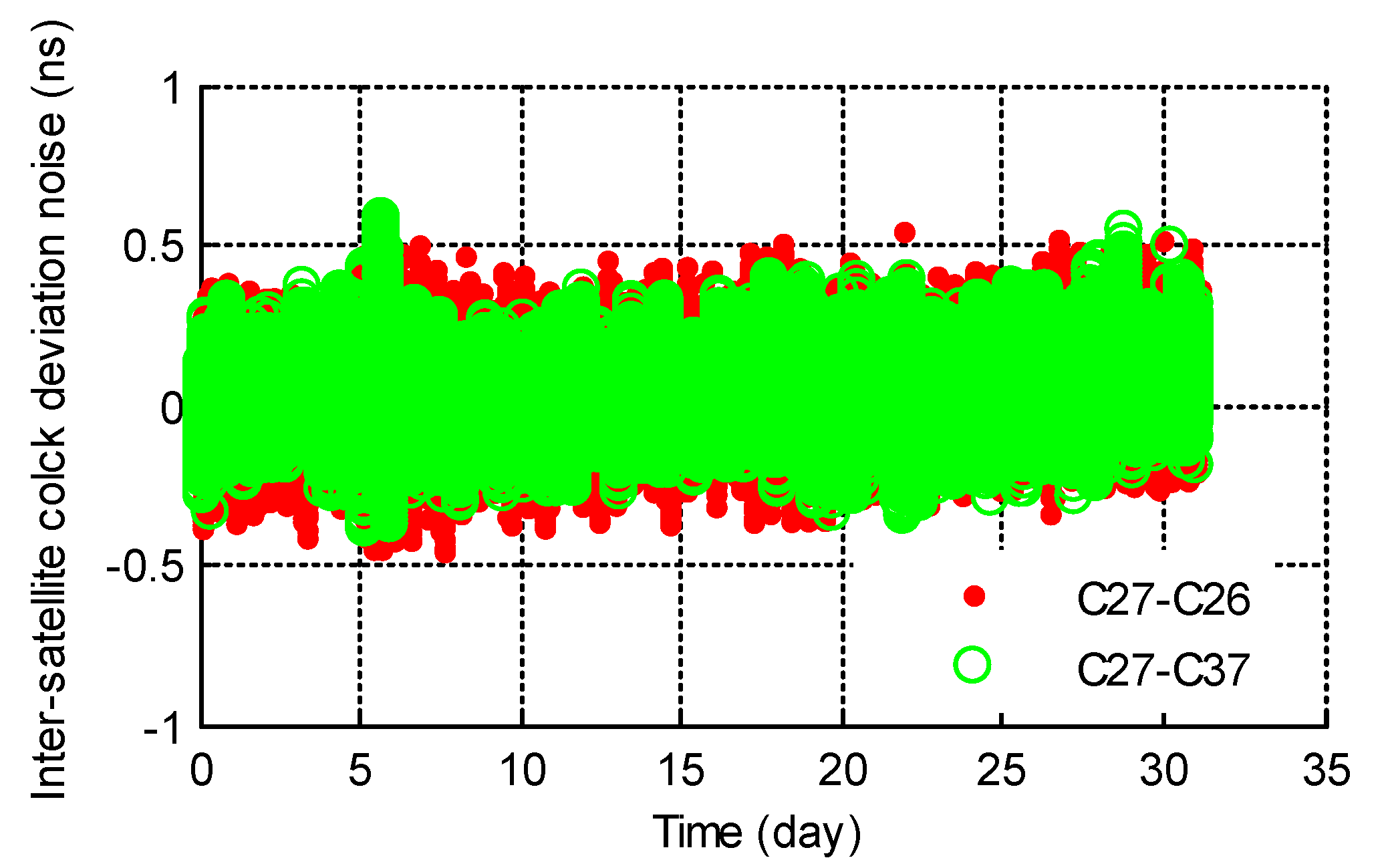
4.2. Inter-Satellite Clock Deviations
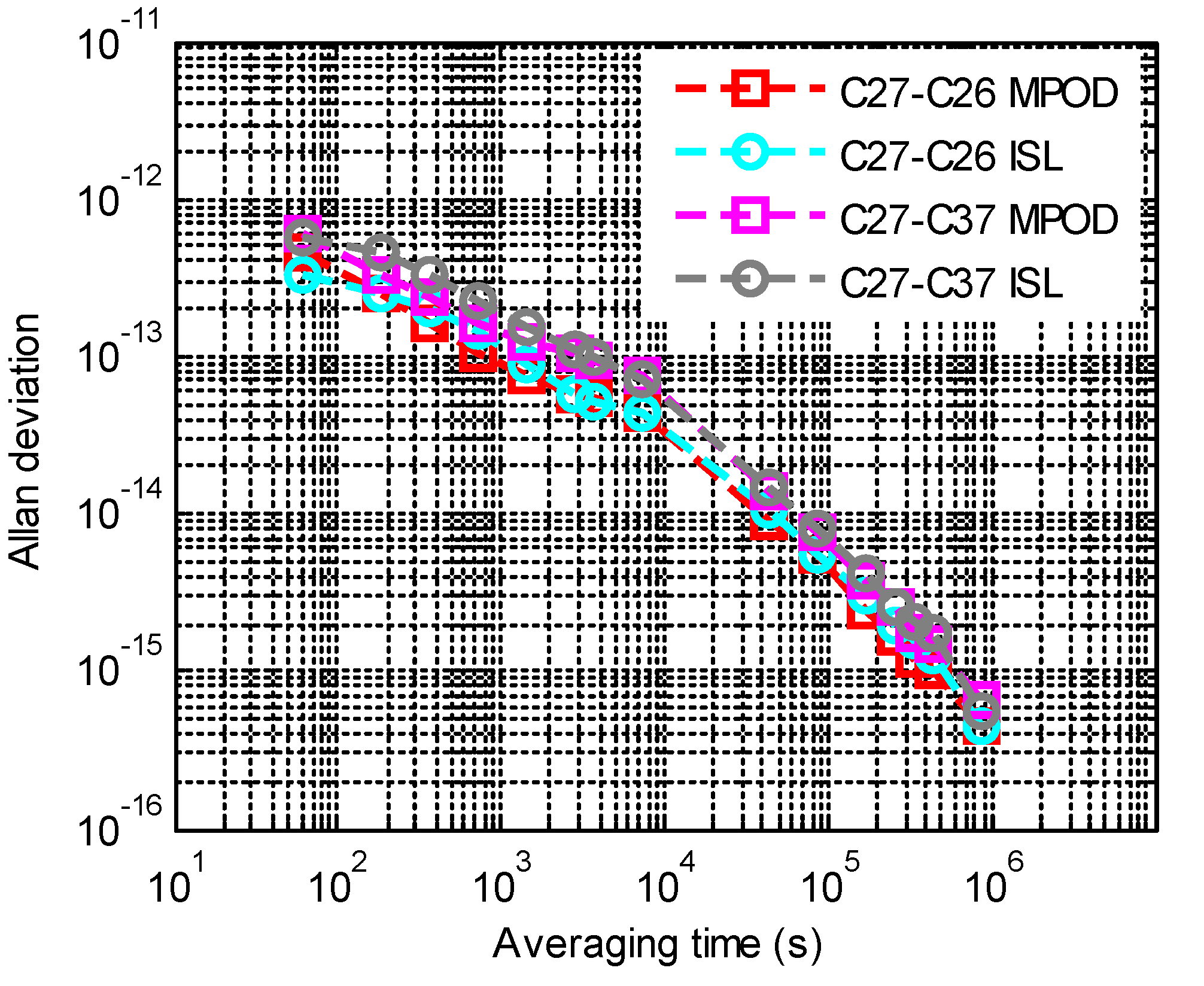
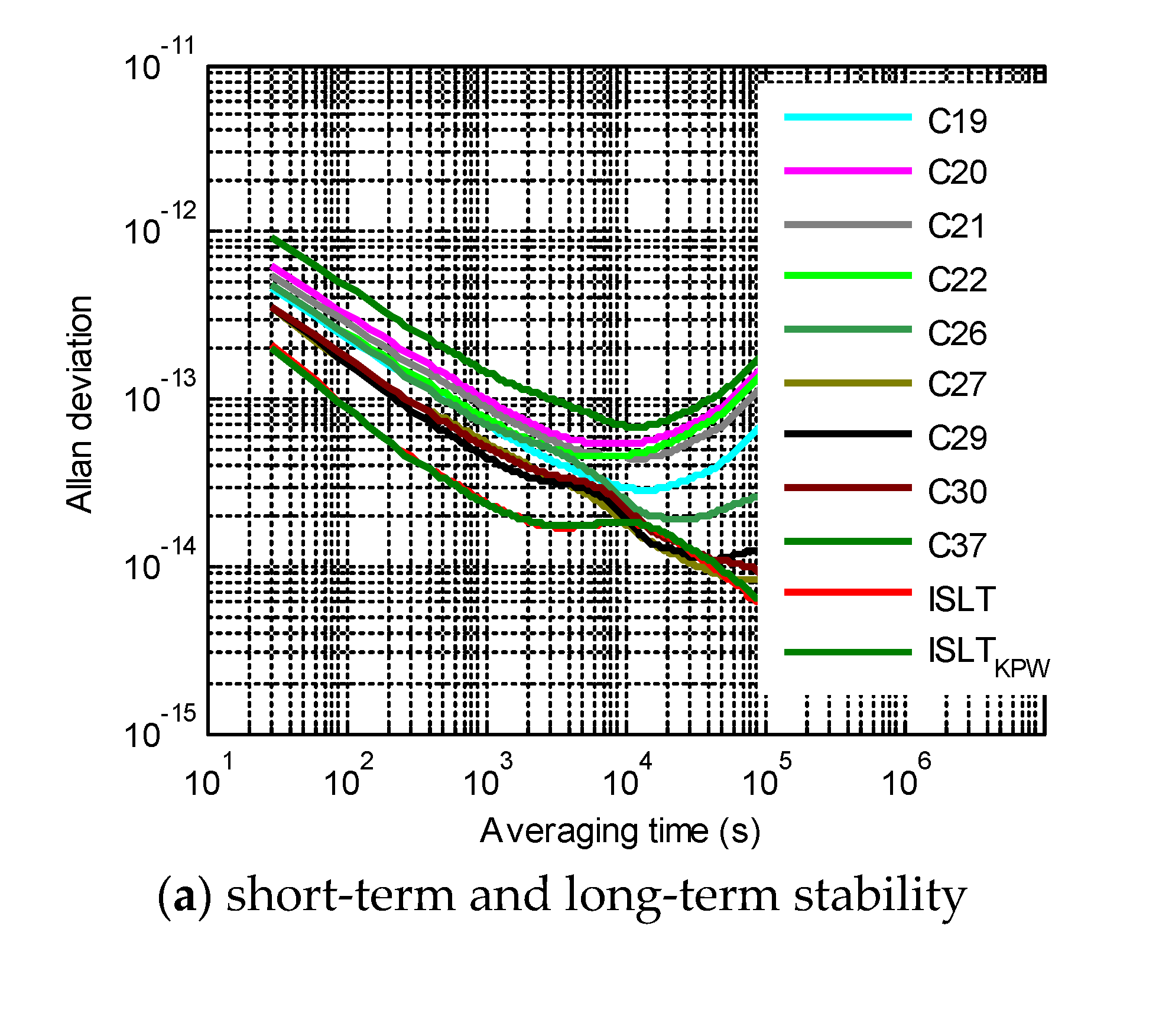
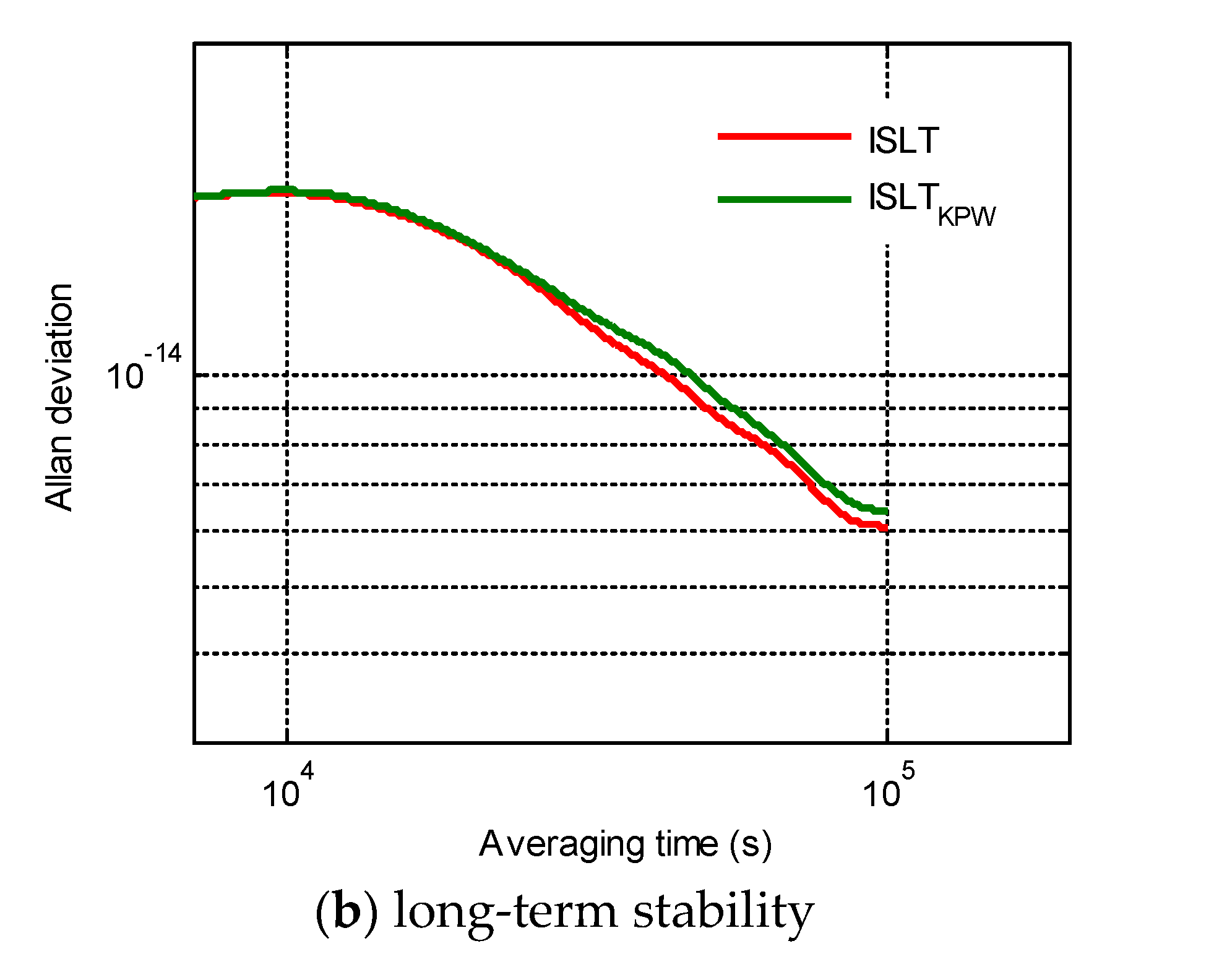
4.3. Frequency Stability Analysis
4.4. Predictability Improvement
5. Summary and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kouba, J. Relativity effect of Galileo passive hydrogen maser satellite clocks. GPS Solut. 2019, 23, 117. [Google Scholar] [CrossRef]
- Yang, D.N.; Yang, J.; Xu, P.J. Timeslot scheduling of inter-satellite links based on a system of narrow beam with time division. GPS Solut. 2017, 21, 999–1011. [Google Scholar] [CrossRef]
- Wu, Z.Q.; Zhou, S.S.; Hu, X.G.; Liu, L.; Shuai, T.; Xie, Y.H.; Tang, C.P.; Pan, J.Y.; Zhu, L.F.; Chang, Z.Q. Performance of the BDS3 experimental satellite passive hydrogen maser. GPS Solut. 2018, 22, 44. [Google Scholar] [CrossRef]
- Wang, D.X.; Guo, R.; Xiao, S.H.; Xin, J.; Tang, T.S.; Yuan, Y.B. Atomic clock performance and combined clock error prediction for the new generation of BeiDou navigation satellites. Adv. Space Res. 2019, 63, 2889–2898. [Google Scholar] [CrossRef]
- Sun, L.Y.; Wang, Y.K.; Huang, W.D.; Yang, J.; Zhou, Y.F.; Yang, D.N. Inter-satellite communication and ranging link assignment for navigation satellite systems. GPS Solut. 2018, 22, 38. [Google Scholar] [CrossRef]
- Yang, D.N.; Yang, J.; Li, G.; Zhou, Y.F.; Tang, C.P. Globalization highlight: Orbit determination using BeiDou inter-satellite ranging measurements. GPS Solut. 2017, 21, 1395–1404. [Google Scholar] [CrossRef]
- Gu, X.B.; Chang, Q.; Glennon, E.P.; Xu, B.D.; Dempseter, A.G.; Wang, D.; Wu, J.P. An autonomous satellite time synchronization system using remotely disciplined VC-OCXOs. Sensors 2015, 15, 17895–17915. [Google Scholar] [CrossRef] [PubMed]
- Pan, J.Y.; Hu, X.G.; Zhou, S.S.; Tang, C.P.; Guo, R.; Zhu, L.F.; Tang, G.F.; Hu, G.M. Time synchronization of new-generation BDS satellites using inter-satellite link measurements. Adv. Space Res. 2018, 61, 145–153. [Google Scholar] [CrossRef]
- Panfilo, G.; Arias, E.F. Studies and possible improvements on the EAL algorithm. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2010, 57, 154–160. [Google Scholar] [CrossRef] [PubMed]
- Parker, T.E.; Levine, J. Impact of new high stability frequency standards on the performance of the NIST AT1 time scale. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2002, 44, 1239–1244. [Google Scholar] [CrossRef] [Green Version]
- Jones, R.H.; Tryon, P.V. Estimating time from atomic clocks. J. Res. Natl. Bur. Stand. 1983, 88, 17–24. [Google Scholar] [CrossRef]
- Weiss, M.A.; Allan, D.W.; Peppler, T.K. A study of the NBS time scale algorithm. IEEE Trans. Instrum. Meas. 1989, 38, 631–635. [Google Scholar] [CrossRef] [Green Version]
- Weiss, M.A.; Weissert, T. AT2, a new tine scale algorithm: AT1 plus frequency variance. Metrologia 1991, 28, 65–74. [Google Scholar] [CrossRef] [Green Version]
- Greenhall, C.A. Kalman plus weights: A time scale algorithm. In Proceedings of the 33rd Annual Precise Time and Time Interval (PTTI) Systems and Applications Meeting, Long Beach, CA, USA, 27–29 November 2001. [Google Scholar]
- Greenhall, C.A. Forming stable timescales from the Jones-Tryon Kalman filter. Metrologia 2003, 40, S335–S341. [Google Scholar] [CrossRef]
- Zhao, Q.L.; Wang, C.; Guo, J.; Wang, B.; Liu, J.N. Precise orbit and clock determination for BeiDou-3 experimental satellites with yaw attitude analysis. GPS Solut. 2018, 22, 4. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Lou, Y.D.; Liu, J.N.; Su, X. Analysis of BDS satellite clocks in orbit. GPS Solut. 2016, 20, 783–794. [Google Scholar] [CrossRef]
- Lewandowski, W.; Arias, E.F. GNSS times and UTC. Metrologia 2011, 48, S219–S224. [Google Scholar] [CrossRef] [Green Version]
- Merck, P.; Achkar, J. Design of a Ku band delay difference calibration device for TWSTFT station. IEEE Trans. Instrum. Meas. 2005, 54, 814–818. [Google Scholar] [CrossRef]
- Tavella, P. Statistical and mathematical tools for atomic clocks. Metrologia 2008, 45, S183–S192. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Satellite PRN | Nominal Clock |
|---|---|---|
| 1 | C19 | Rb |
| 2 | C20 | Rb |
| 3 | C21 | Rb |
| 4 | C22 | Rb |
| 5 | C26 | PHM |
| 6 | C27 | PHM |
| 7 | C29 | PHM |
| 8 | C30 | PHM |
| 9 | C37 | Rb |
| PRN | Noise Diffusion Coefficients | ||
|---|---|---|---|
| C19 | 2.38 × 10−12 | 5.66 × 10−16 | / 1 |
| C20 | 3.42 × 10−12 | 1.82 × 10−15 | / |
| C21 | 3.02 ×10−12 | 1.41 × 10−15 | / |
| C22 | 2.68 ×10−12 | 1.67 × 10−15 | / |
| C26 | 2.50 × 10−12 | / | / |
| C27 | 1.78 × 10−12 | / | / |
| C29 | 1.70 × 10−12 | / | / |
| C30 | 1.86 × 10−12 | / | / |
| C37 | 5.05 × 10−12 | 2.05 × 10−15 | / |
| ISLT Symbol | Clock Ensemble |
|---|---|
| ISLT | All the nine satellite clocks |
| ISLT1 | All the five Rb clocks |
| ISLT2 | All the four PHMs |
| ISLT3 | C19 C20 C21 C22 C26 C27 C29 C30 |
| ISLT4 | C19 C20 C21 C22 C26 C29 C30 C37 |
| PRN | Predicting RMS (ns) | PRN | Predicting RMS (ns) |
|---|---|---|---|
| C19 | 0.25 | C27 | 0.27 |
| C20 | 0.37 | C29 | 0.33 |
| C21 | 0.36 | C30 | 0.35 |
| C22 | 0.40 | C37 | 0.80 |
| C26 | 0.46 | ISLT | 0.18 |
| PRN | Predicting RMS (ns) | PRN | Predicting RMS (ns) |
|---|---|---|---|
| C19 | 1.45 | C27 | 1.16 |
| C20 | 2.73 | C29 | 1.29 |
| C21 | 2.78 | C30 | 1.30 |
| C22 | 2.61 | C37 | 4.67 |
| C26 | 2.28 | ISLT | 1.05 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, L.; Huang, W.; Gao, S.; Li, W.; Guo, X.; Yang, J. Joint Timekeeping of Navigation Satellite Constellation with Inter-Satellite Links. Sensors 2020, 20, 670. https://doi.org/10.3390/s20030670
Sun L, Huang W, Gao S, Li W, Guo X, Yang J. Joint Timekeeping of Navigation Satellite Constellation with Inter-Satellite Links. Sensors. 2020; 20(3):670. https://doi.org/10.3390/s20030670
Chicago/Turabian StyleSun, Leyuan, Wende Huang, Shuaihe Gao, Wei Li, Xiye Guo, and Jun Yang. 2020. "Joint Timekeeping of Navigation Satellite Constellation with Inter-Satellite Links" Sensors 20, no. 3: 670. https://doi.org/10.3390/s20030670
APA StyleSun, L., Huang, W., Gao, S., Li, W., Guo, X., & Yang, J. (2020). Joint Timekeeping of Navigation Satellite Constellation with Inter-Satellite Links. Sensors, 20(3), 670. https://doi.org/10.3390/s20030670