1. Introduction
Smart cities have emerged at the heart of “next stage urbanization” as they are equipped with fully digital infrastructure and communication technologies to facilitate efficient urban mobility. The fundamental enabler of a smart city is dependent on connected devices, though the real concern is how the collected data are distributed city-wide through sensor technologies via the Internet of Things (IoT). Heterogeneous vehicular networks in a connected infrastructure network are able to sense, compute, and communicate information through various access technologies: Universal Mobile Telecommunications System (UTMS), Fourth Generation (4G), and Dedicated Short-Range Communications (DSRC) [
1,
2]. In vehicular sensor networks (VSN) and Internet of vehicles (IOV), each vehicle act as receivers, senders, and routers simultaneously to transmit data over the network or to a central transportation agency as an integral part of intelligent transportation systems (ITS) [
3,
4]. Furthermore, each and every network node in VSN is assumed to store, carry, and precisely transfer the data with cooperative behavior. In recent years, following rapid diversification, navigation technologies and traffic information services enable a large amount of data to be collected from the different devices such as loop detectors, on-board equipment, speed sensors, remote microwave traffic sensors (RTMS), and road-side surveillance cameras etc., that have been proactively used for monitoring of traffic conditions in the ITS domain [
5,
6,
7,
8,
9]. Sensor networks in the form of road side units (RSUs) offer numerous applications including broadcasting periodic informatory, warnings, and safety messages to road users. The data obtained from these different sources have provided myriad opportunities to estimate and predict travel time and future traffic states through a large number of data-driven computational and machine learning approaches. Accurate traffic state prediction (TSP) ensures efficient vehicle route planning, and pro-active real-time traffic management.
TSP is achieved in three distinct steps: (i) prediction of the desired traffic flow parameters (i.e., volume, speed, and occupancy); (ii) identification of traffic state; and (iii) realizing the traffic state output. TSP can be classified as either short-term prediction or long-term prediction. In the former prediction type, short-term changes in traffic status are predicted (e.g., during a 5, 10, 15, or 30 min prediction horizon), and long-term prediction is usually estimated in days and months [
10]. Short-term predictions can either be used directly by traffic professionals to take appropriate actions or can be added as inputs for proactive solutions in congestion management. Short-term prediction reduces common problems such as traffic congestion, road accidents, and air pollution; meanwhile, it also offers road users and traffic management agencies with important information to assist in better decision-making [
11]. Three factors affect the quality of prediction in real-time traffic information. These factors include: (i) variation in data collected from various sources like sensors and other sources; (ii) dynamic nature of traffic conditions; and (iii) randomness and stochastic nature of traffic appearing in the supply and demand. However, addressing these factors remained challenging and significant in the realm of quality prediction for real-time traffic information [
12].
In TSP, prediction methodologies are broadly studied into two main categories: parametric and non-parametric techniques [
8]. Parametric methods include auto aggressive integrated moving average method ARIMA [
13], exponential smoothing (ES) [
14], and seasonal auto aggressive integrated moving average method (SARIMA) [
15,
16]. In their study, Li et al. suggested that a multi-view learning approach estimates the missing values in traffic-related time series data [
17]. Parametric methods focus on pre-determining the structure of the model based on theoretical or physical assumptions, later tuning a set of parameters that represent the traffic conditions (i.e., a trend in the actual world) [
10,
11]. These practices develop a mathematical function between historical and predicted states, for instance, model-based time series such as ARIMA, which is commonly used for traffic predictions in all parametric methods [
18]. However, autoregressive models provide better accuracy for TSP models, while considering the traffic information about upstream and downstream locations is accounted for on freeways [
9]. Parametric methods have good accuracy and high computational efficiency and are highly suited for linear or stationary time-series [
19]. On the other hand, non-parametric approaches provide several advantages such as the ability to avoid model’s strong assumptions and learn from the implicit dynamic traffic characteristics through archived traffic data. These models have the benefit of being able to manage non-linear, dynamic tasks, and can also utilize spatial–temporal relationships, whereas non-parametric methods require a large amount of historical data and training processes. Non-parametric techniques include artificial neural network (ANN) [
20,
21,
22]; support vector regression (SVR) [
23,
24]; K-nearest neighbor (KNN) [
25,
26,
27,
28,
29]; and Bayesian models [
30,
31]. Since non-parametric techniques yield better prediction accuracy compared to ordinary parametric techniques like time series as they require significantly high computational effort. Their prediction accuracy is largely dependent on the quantity and quality of training data [
32]. The above-mentioned methods have been successfully deployed in various transport related applications where predictions are required for excessive passenger flow at a metro station or in a crowd gathered for a special event [
33,
34].
A critical review of literature for TSP indicates that time series and conventional ANN models have been widely employed for short term TSP. Although these models were aimed to fit the speed, density, or volume data as they usually inherit an overfitting issue. Thereby, the ability of models that capture generalized trends for traffic prediction is compromised. Macroscopic traffic parameters such as traffic flow, traffic speed, and density are the state variables of interest used in TSP, and are subsequently evaluated using level of service (LOS). However, training and testing the accuracy for the majority of such modeling approaches is frequently questioned. To overcome this issue, we incorporated recent AI and machine learning state-of-art-approaches such as decision jungles and LD-SVM (via hyperparameter optimization) as these methods have been rarely been explored in the existing works. Data utilized in current study was extracted from traffic simulator ‘VISSIM’, which realistically simulates complex vehicle interaction in transportation systems. Furthermore, this study has major contributions in terms of spatiotemporal analysis of different LOS classes (i.e., A-F) under different data-collection time-intervals. In general, we emphasized short-term prediction, which is considered useful for improving the productivity of transportation systems, and also beneficial in reducing both the direct and indirect costs. Moreover, this study reviewed the different techniques and approaches that have been used for short-term TSP. A comprehensive comparative analysis was also conducted to evaluate the ability and efficiency of proposed methods in terms of prediction accuracy. The specific main contributions of this paper are:
We extend the exploration of decision jungles and locally deep SVM (LD-SVM) for short term traffic state prediction using hyperparameter optimization (via random sweep).
A comprehensive comparison was implemented to demonstrate the ability and the effectiveness of each machine learning model for TSP accuracy.
Prediction performances were evaluated under different forecasting time-intervals at distinct time scales.
Short-term traffic state was taken as a function of level of service (LOS) along a basic freeway segment. Study results demonstrated that decision jungles were more efficient and stable at different predicted horizons (time-intervals) than the LD-SVM, MLP, and CN2 rule induction.
The remainder of this paper is organized as follows.
Section 2 presents a brief overview of the methods and techniques for TSP in the existing literature.
Section 3 describes the preliminaries for different machine learning models used in this study.
Section 4 presents study area, data description, and key parameter settings.
Section 5 highlights results and discussion.
Section 6 includes the comparison of different models. Finally,
Section 7 summarizes the conclusions, presents key study limitations, and outlook for future studies.
2. Related Work
Since early 1980, non-linear traffic flow prediction has been the focus of several research studies as it is regarded as extremely useful for real-time proactive traffic control measures [
15,
16]. From its inception in the 1980s, artificial neural networks (ANNs) have been widely used for the analysis and prediction of time series data. They have the ability to perceive the non-linear connection between features of input and output variables that in turn can produce effective TSP solutions. For example, Zheng et al. combined Bayesian inference and neural networks to forecast future traffic flow [
35]. Ziang and Adeli proposed a time-delay via recurrent wavelet neural network, where the periodicity demonstrated the significance of traffic flow forecasting [
36]. Parametric methods can obtain better prediction outcomes when the data flow of the traffic varies temporally. These methods assume a variety of difficult conditions such as residual normalization and predefined system structure and rarely converged due to the stochastic or non-linear traffic flow characteristics.
To address the limitations of parametric models, different approaches including linear kernel, polynomial kernel, Gaussian kernel, and optimized multi kernel SVM (MK-SVM) have been proposed by recent research studies for traffic flow prediction [
37,
38,
39,
40]. MK-SVM predicted the results by mapping the linear parts of historical traffic flow data using the linear kernel, while map residual was performed using the non-linear kernel. Alternatively, generating if–then rules, also known as rule induction techniques that search the training data for proposition rules, can also be used. which CN2 is best-known example of this approach, that have been successfully utilized by previous for flow prediction [
41,
42]. Hashemi et al. developed different models for classification based on if–then rules in the short-term traffic state prediction for a highway segment [
43]. In contrast, ANNs’ popular network structure is multi-layer perceptron (MLP), which has been widely used in many transport applications due to its simplicity and capacity to conduct non-linear pattern classification and function approximation. The MLP model generally works well in the capture of complex and non-linear relations, but it usually requires a large volume of data and complex training. Many researchers, therefore, consider it as the most commonly implemented network topology [
44,
45,
46]. Recently, in the study by Chen et al., they adapted a novel approach using dynamic graph hybrid automata for the modeling and estimation of density on an urban freeway in the city of Beijing, China [
47]. The authors validated the feasibility of their modeling approach on Beijing’s Third Ring Road. A recent study conducted by Zahid et al., proposed a new ensemble-based Fast forest quantile regression (FFQR) method to forecast short-term travel speed prediction [
48]. It was concluded that proposed approach yielded robust speed prediction results, particularly at larger time-horizons.
Aside from the above-mentioned models, decision trees and forests have a rich history in machine learning and have shown significant progress in TSP, as reported in some of the recent literature [
49,
50]. Various studies have been conducted to address the shortcomings of traditional decision trees, for example, their sub-optimal efficiency and lack of robustness [
51,
52]. Similarly, in another research study, the researchers investigated the efficacy of the ensemble decision trees for the TSP [
50]. It was concluded that trees generate efficient predictions traditionally. At the same time, researchers have concluded that learning with ideal decision trees could be problematic due to overfitting [
53]. Henceforth, this approach has some limitations, such that the amount of data to be provided as the number of nodes in decision trees would increase exponentially with depth, affecting the accuracy [
54]. Recently, a study proposed a novel online seasonal adjustment factors coupled with adaptive Kalman filter (OSAF-AKF) model for estimating the real-time seasonal heteroscedasticity in traffic flow series [
55].
In contrast, machine learning techniques and their performances for classifying different problems have been encouraging such as decision jungles and LD-SVM, which are heavily dependent on a set of hyperparameters that, in turn, efficiently describes different aspects of algorithm behavior [
54,
56,
57]. It is important to note that no suitable default configuration exists for all problem domains. Optimizing the hyperparameter for different models is important in achieving good performance in the realm of TSP [
56]. There are two types of hyperparameter optimization: manual and automatic. Manual is time-consuming and depends on expert inputs, while an automatic approach removes expert input. Automatic approaches include the most common practice methods such as grid search and random search [
58]. Several libraries have recently been introduced to optimize hyperparameters. Hyperopt Library is one of the libraries offering different hyper-optimization algorithms for machine learning algorithms [
59]. Existing techniques for optimizing EC-based hyperparameters [
60,
61] such as differential evolution (DE) and particle swarm optimization (PSO) are useful since they are conceptually easy and can achieve highly competitive output in various fields [
62,
63,
64,
65]. However, these methods have a great deal of calculation and a low convergence rate in the iterative process. In contrast, hyperparameter optimization methods such as random grid, entire grid, and random sweep have achieved a great deal of attention in hyperparameter optimization. In a random grid, the matrix is computed for all combinations, and the values are extracted from the matrix by the number of defined iterations in relation to the entire grid incurred for all possible combinations. The difference between the random grid and the random sweep is that the latter technique selects random parameter values within the set, while the former only employs the exact values defined in the algorithm module. With this understanding, random sweep was chosen for the models conducted in this study for hyperparameter optimization with the intention of improving the accuracy of short-term TSP.
3. Preliminaries
Machine learning provides a number of supervised learning techniques for classification and prediction. The objective of a classification problem is to learn a model, which can predict the value of the target variable (class label) based on multiple input variables (predictors, attributes). This model is a function, which maps as an input attribute vector
to the output class label (i.e.,
ϵ {C1, C2, C3, …, Cn}). The label training set is represented as follows:
where
is the target label class (dependent variable) and vector
is composed of
x0,
x1,
x2,
x3, …,
xn. The macroscopic flow, density, and speed obtained from traffic simulation are referred to as input parameters when fed/imported to machine learning models for short term traffic prediction. The model learns from these input variables for different time intervals (i.e., 5, 10, and 15 min). Either the next time interval level of service (LOS) is considered as a class label or target variable. The predicted label class for time (Time duration = 1), is given in the following form:
The current study utilized four different machine learning methods for short term TSP. These methods included LD-SVM, decision jungles, CN2 rule induction, and MLP. The detailed methodology for each technique is presented below.
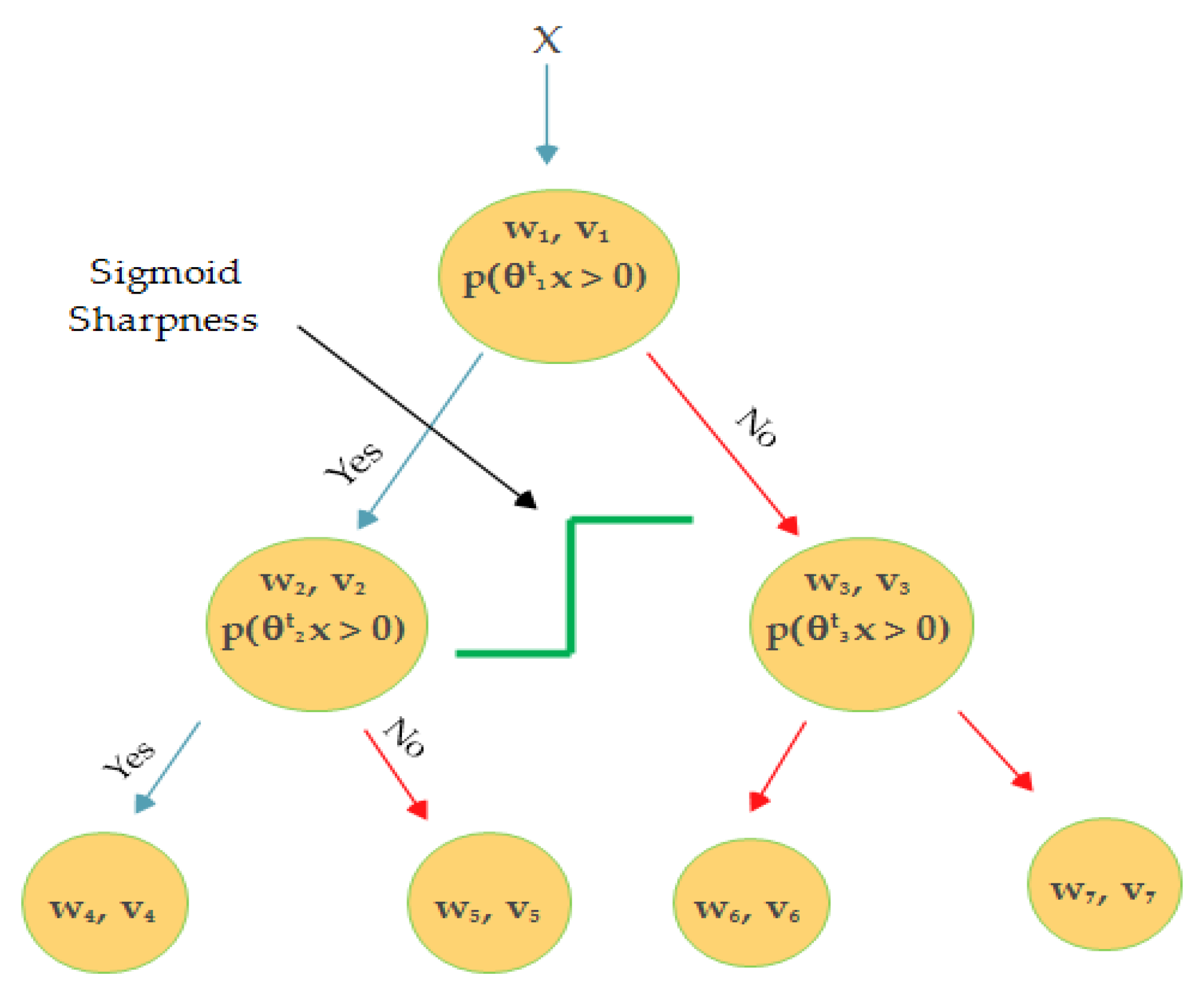
3.1. Local Deep Support Vector Machine (LD-SVM)
SVM is based on statistical learning theory as suggested by Vapnik in 1995 for classification and regression [
66]. Local deep kernel learning SVM (LD-SVM) is a scheme for effective non-linear SVM prediction while preserving classification precision above an acceptable limit. Using a local kernel function allows the model to learn arbitrary local embedding features including sparse, high-dimensional, and computationally deep features that bring non-linearity into the model. The model employs routines that are effective and primarily infused to optimize the space of local tree-structured embedding features in more than half a million training points for big training sets. LD-SVM model training is exponentially quicker than traditional SVM models training [
57]. LD-SVM can be used for both linear and non-linear classification tasks. It is considered as a special type of linear classifier (e.g., logistic regression LG), however, LG is unable to perform sufficiently in complicated and linear tasks. In addition, LD-SVM model learning is significantly faster and computationally more efficient than traditional SVM model training. The formulation of a local deep kernel learns a non-linear kernel
, where
and
are the local and global kernel. The product of local kernel
and global kernel
leads to the prediction function.
where
,
denote dimension
of
,
,
, and
is the Kronecker product.
is the local feature space and
is the global features space.
while training the LD-SVM and smoothing the tree are shown in
Figure 1, Equation (1) can further written as below:
where
is the indicator function for each node
in the tree;
is to go left or right;
stack with non-linearity;
is sigmoid sharpness for the parameter scaling and could be set by validation. Higher values imply that the ‘tanh’ is saturated in the local kernel, while a lower value means a more linear range of operation for
θ. The full optimization formula is given in Equation (10). The local deep kernel learning (LDKL) primal for jointly learning
and
from the training data, where
can be described as:
where
is the weight of the regularization term; and
specifies the amount of space between the region boundary and the nearest data point to be left.
controls the curvature amount allowed in the model’s decision boundaries.
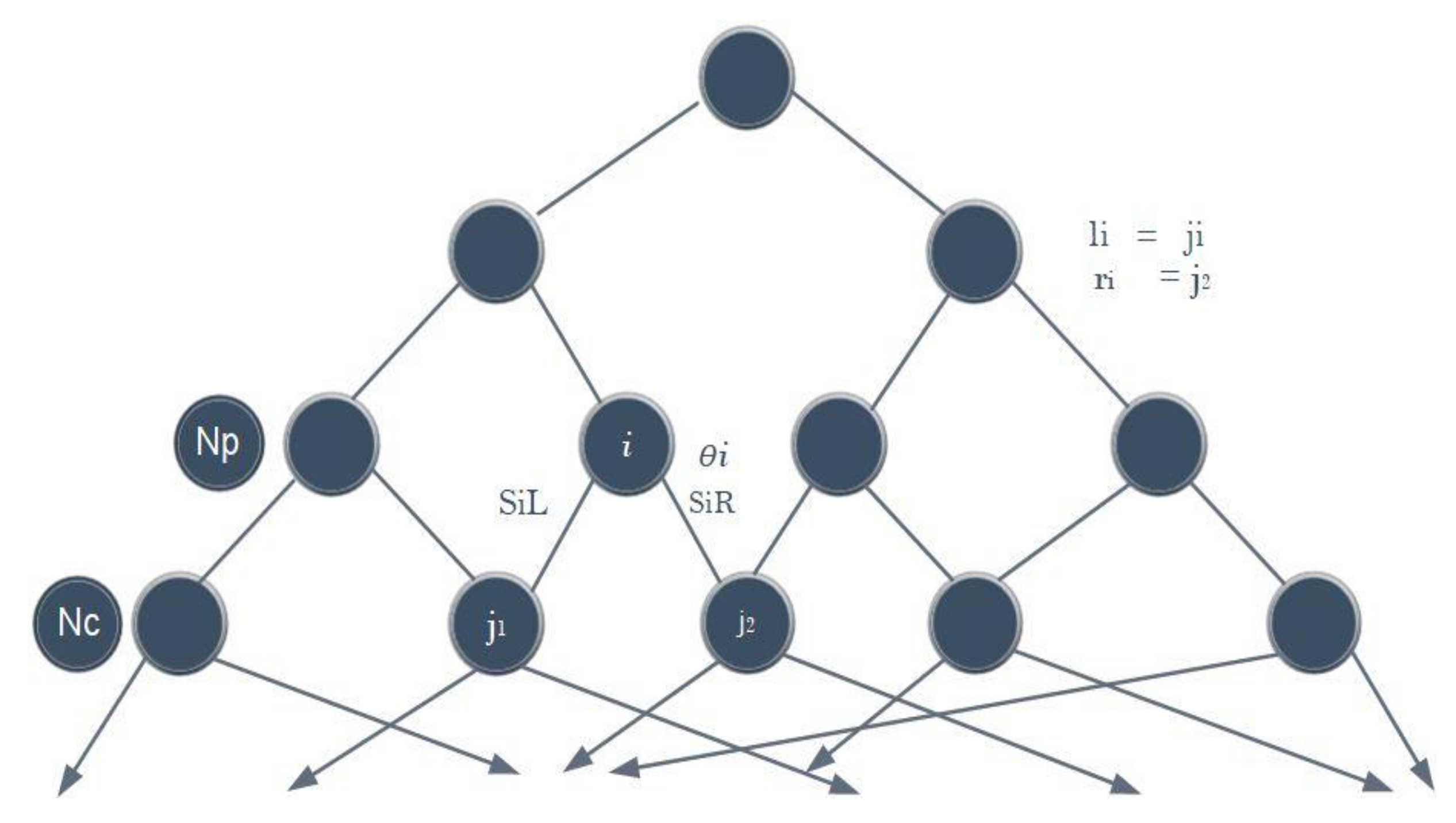
3.2. Decision Jungles
Decision jungles are the latest addition to decision forests. They are comprised of a set of decision-making acyclic graphs (DAGs). Unlike standard decision trees, the DAG in the decision jungle enables different paths from root to leaf. A DAG decision has a reduced memory footprint and provides superior efficiency than a decision tree. Decision jungles are deemed as non-parametric models that provide integrated feature selection, classification, and are robust in the presence of noisy features. DAGs have the same structure as decision trees, except that the nodes have multiple parents. DAGs can limit the memory consumption by specifying a width at each layer in the DAG and potentially help to reduce overfitting [
54]. Considering the nodes set at two consecutive levels of DAGs,
Figure 2 shows that the nodes set consists of child nodes
and parent nodes
. Let
denote the parameters of the split function
for parent node
.
denotes the categorized training samples
, where it reaches node
, and set of samples can be calculated from node
, which travels through its left or right branches. Given
and
, the left and right are computed by
and
, respectively.
indicates the left outward edge from parental node
to a child node, and
denotes the right outward edge. Henceforth, the number of samples reaching any child node
is given as:
3.3. CN2 Rule Induction
In this study, rule learning models were also explored for TSP. These models are usually used for classification and prediction solutions. The CN2 algorithm is a method of classification designed to induce simple efficiency; “if condition then predicts class,” even in areas where noise may occur. Inspired by Iterative Dichotomiser 3 (ID3), the original CN2 uses entropy as the function for rule evaluation; Laplace estimation may be defined as an alternative measure of the rule quality to fix unpleasant entropy (downward bias), and it is described as follows [
67]:
where ‘
’ represents the number of positive examples in the training set covered by Rule ‘
’;
represents the number of negative instances covered by
; and ‘
’ is the number of the training classes available in the training set.
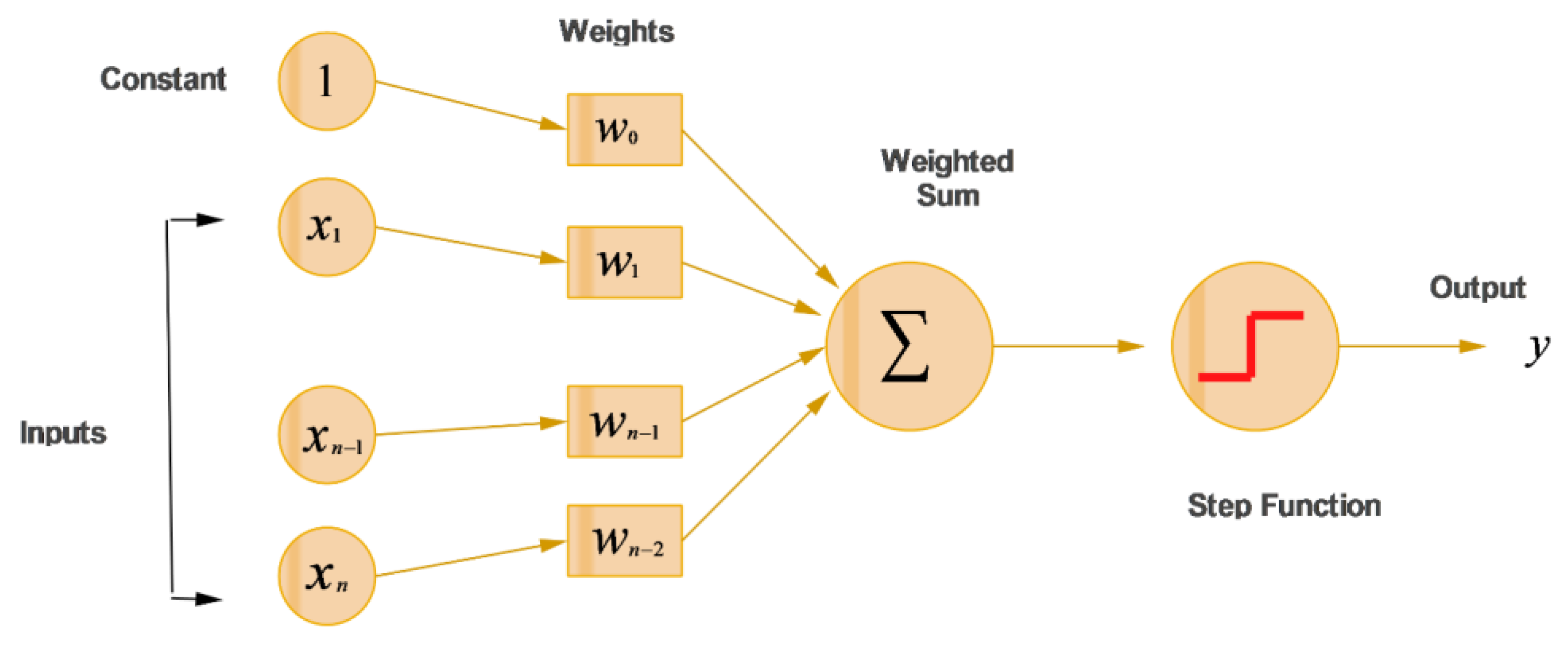
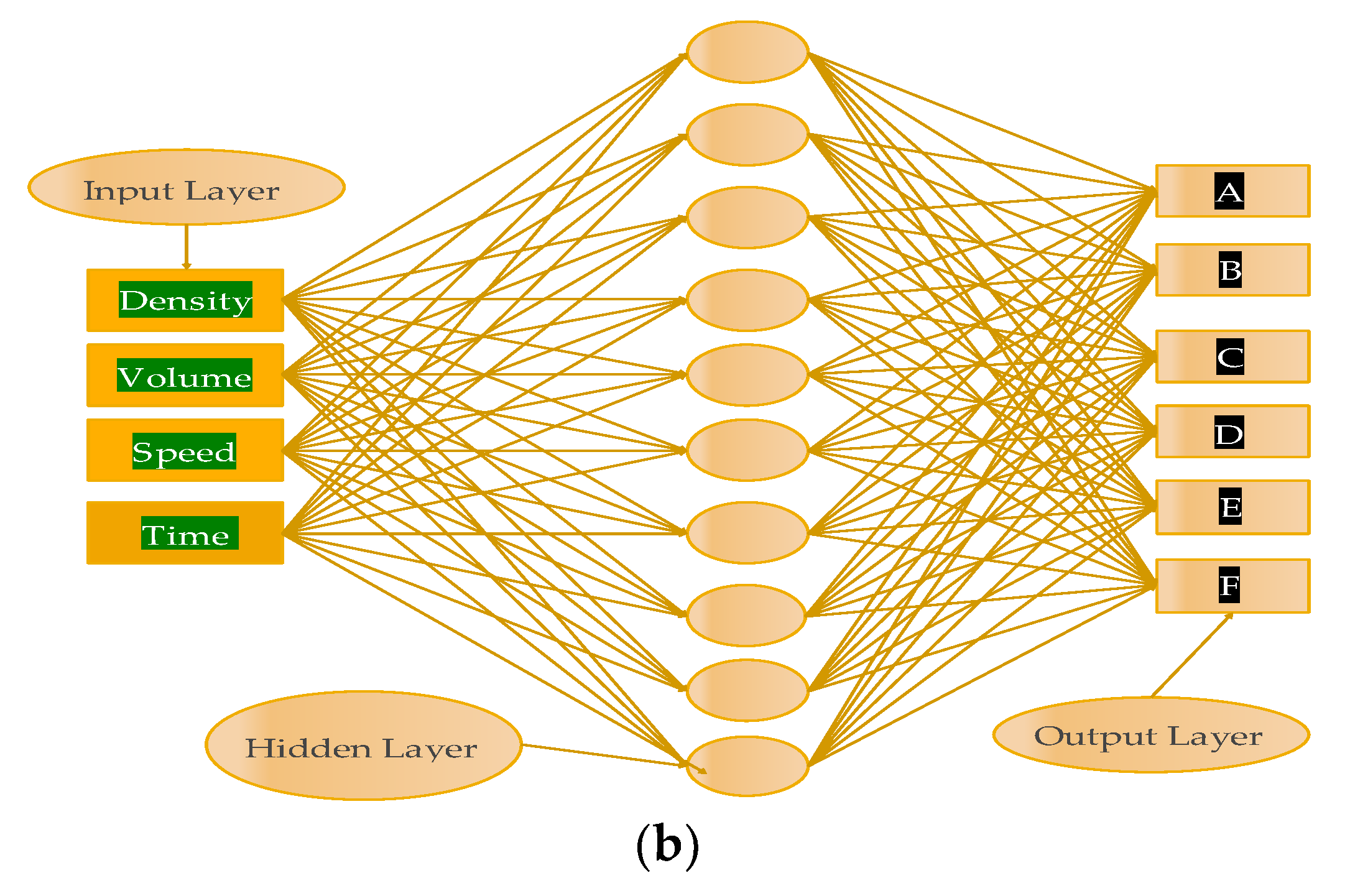
3.4. Multi-Layer Perceptron
The most common ANN model is the multi-layer perceptron (MLP). In MLP, input values are transformed by activation function
f, giving the value as an output from the neuron. The MLP is made up of various layers including one input layer, one or more hidden layers, and one output layer. In MLP, parameters such as the number of input variables, number of hidden layers, activation function, and learning rate play an important role in the design of neural network architecture. The multi-layer perceptron (MLP) is shown in
Figure 3. Neurons have activation functions for both the hidden layer and the output layer; neurons receive only the input dataset and have no activation functions on the input layer. Weights are multiplied with inputs, and are summarized accordingly as;
Whilst the most commonly applied activation function is logistic function (sigmoid function), given in following equation:
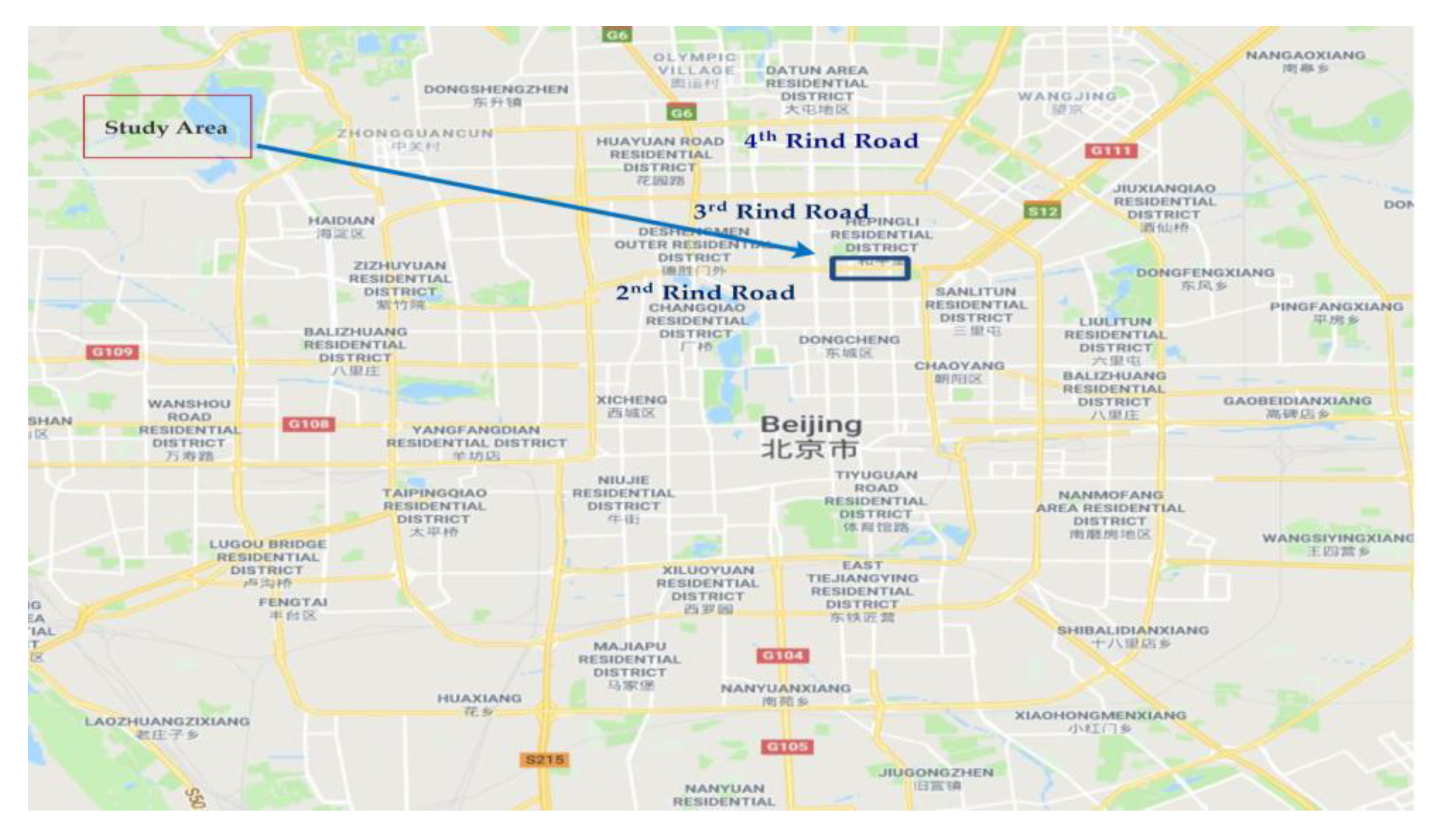
4. Study Area
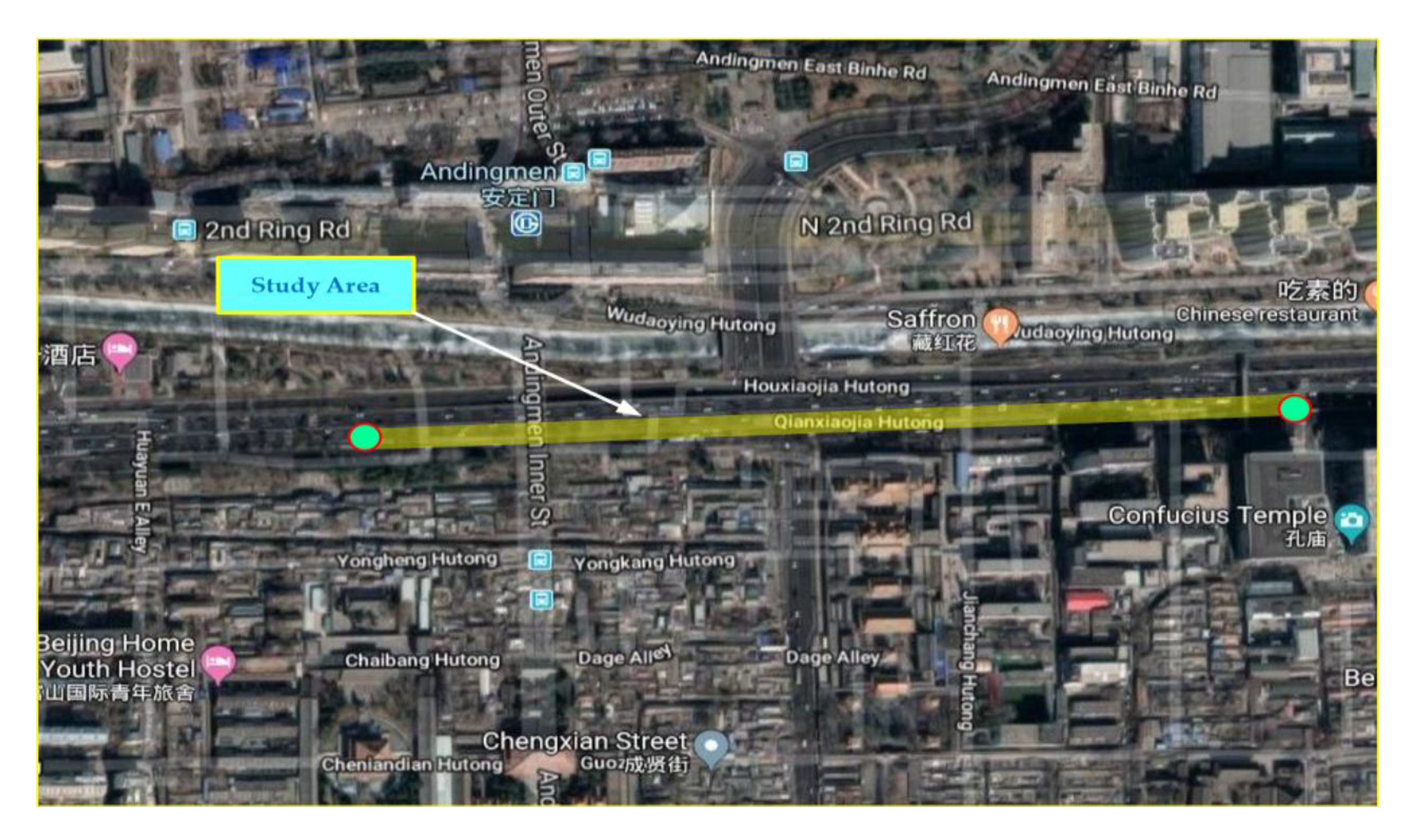
This study was conducted in the city of Beijing, China, which covers an area of 16,410 km
2, and hosts 21.7 million people. Road transportation is an integral part of the city’s routine businesses, linking most households to workplaces or schools. There are 21,885 km of paved public road in Beijing (as of June 2016), 982 km of which are classified as highways [
68]. According to the Beijing census, the number of private cars was close to 5.4 million, in addition to 5.3 million other vehicles in different categories including 330,100 trucks. The Second-Ring Road consists of six percent of the urban space of Beijing, with clusters of major companies, businesses, and administrative institutions, but generate 30% of the traffic volume per day [
68,
69]. Within this perspective, integrated urban planning is becoming difficult, so much so that 60% of the historical site of the city is lying on the Second Ring Road. Since the traffic hotspots are concentrated mainly in the center of Beijing, we have chosen an area as the study area at this location [
68,
70]. The Second Ring Road is approximately 33 km long including 37 on-ramps and 53 off-ramps.
Figure 4 shows the study area on the Second Ring Road along with other different ring roads. In this study, a basic freeway segment of the Second Ring (L = 478.5 m) was selected.
Data Collection and Parameters Setting
The first step in preparing the experiment was to develop a microscopic model using VISSIM (Micro Traffic Simulation Software) to capture all the essential data for the Second Ring Road. When simulating the field conditions, it is essential to calibrate the driving behavior parameters for the traffic simulator, and this was accomplished by standard procedures, as reported in the existing work [
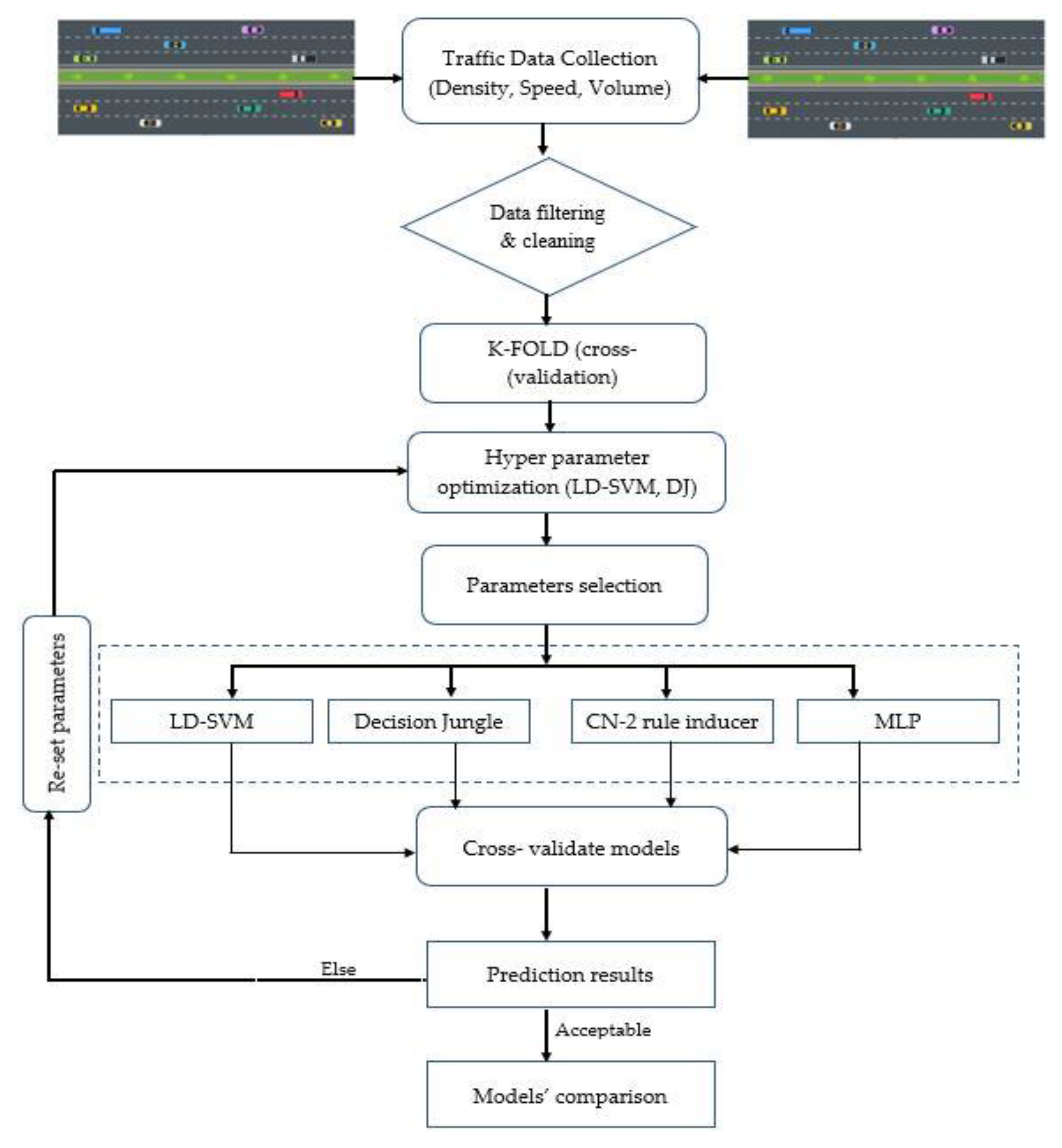
71]. In doing so, several simulation iterations were performed, incurring a different random seed to ensure that the model works under the real-time scenario. The proposed methodology for the present study is presented in
Figure 5.
In this study, macroscopic traffic parameters (volume, speed, density) were obtained from the VISSIM simulation analysis. Traffic volume or flow rate can be defined as the number of vehicles that pass through a point on a highway or lane at a specific time, and is usually expressed in units of vehicles per hour per lane (v/h/l), while density is referred to the number of vehicles occupying a unit length of roadway, and is denoted by vehicles per km/mile per lane (v/m/ln). Occupancy is sometimes synonymously used with density; however, it should be noted that it shows the percentage of time that a road segment is occupied by vehicles. Traffic speed is another important state parameter, and can be found by the distance traversed per unit of time, and is typically expressed in km/h. or miles/h. These parameters are further calculated by using the link evaluation in VISSIM. Once the factual freeway architecture is achieved, the key macroscopic characteristics are identified in order to adjust the entire microscopic simulator (e.g., demand flow and split ratio). Demand flow is defined as the traffic volume as it utilizes the facility, while split ratio is the directional hourly volume (DHV) in the peak direction, which varies with respect to time, that is, the peak time and off-peak time. Additionally, the real traffic state of the Second Ring Road in this study was obtained from the Beijing Collaborative Innovation Center for Metropolitan Transportation. Thereby, the model of the road network deemed for the Second Ring Road was constructed by VISSIM. It has three lanes, where each lane is designated with an average width of 3.75 m, as shown in
Figure 6. Simulations in the VISSIM were carried for 6 h, during the period 6:00 am to 12:00 pm, and a congested regime prevailed from 1.5 to 2 h (i.e., between 7:30 am to 9:30 am), leveraging the almost free flow for the remaining hours. Therefore, the transition state from D to F encountered few labels. Meanwhile, data were collected using different prediction horizons such as 5, 10, and 15 min.
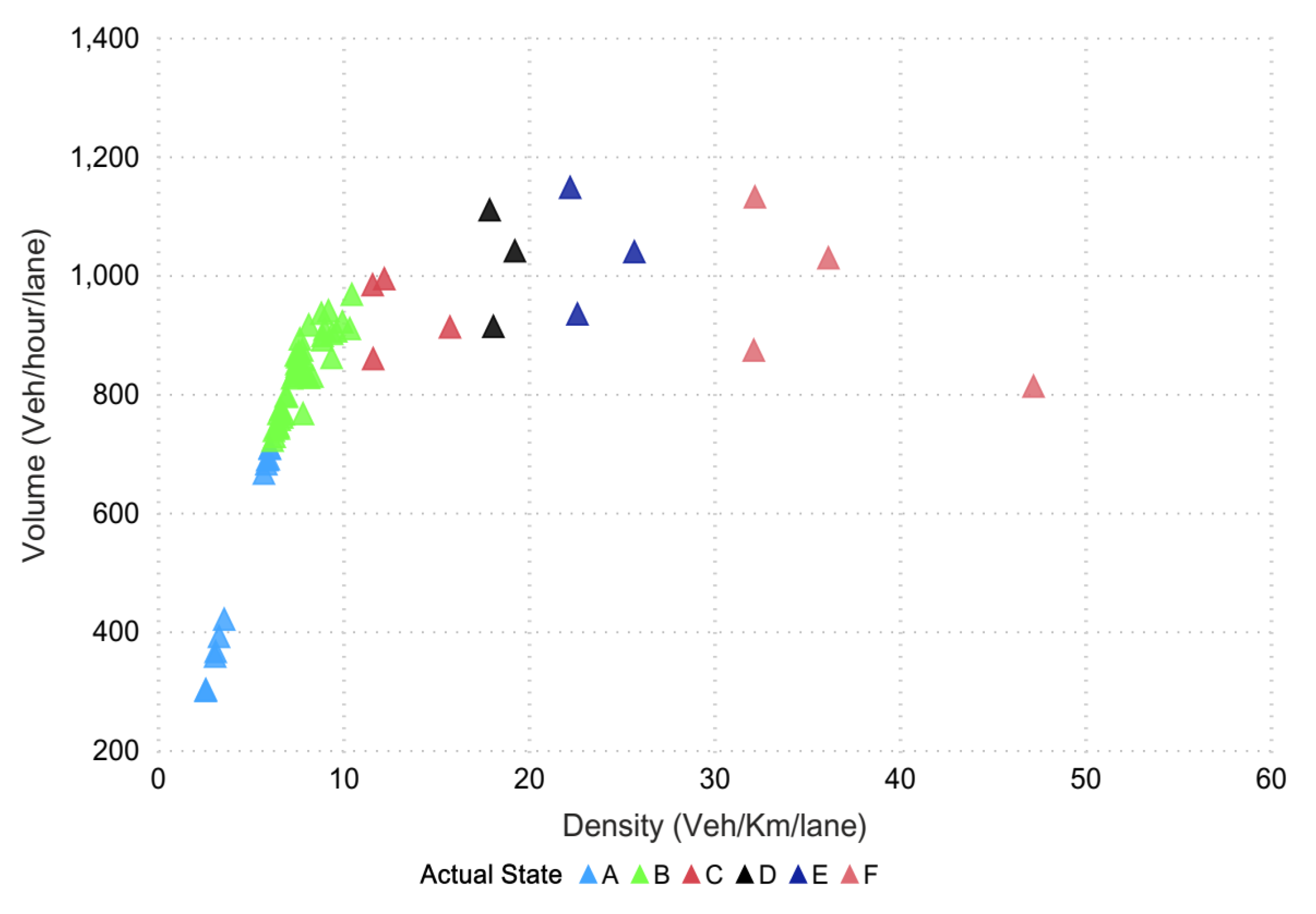
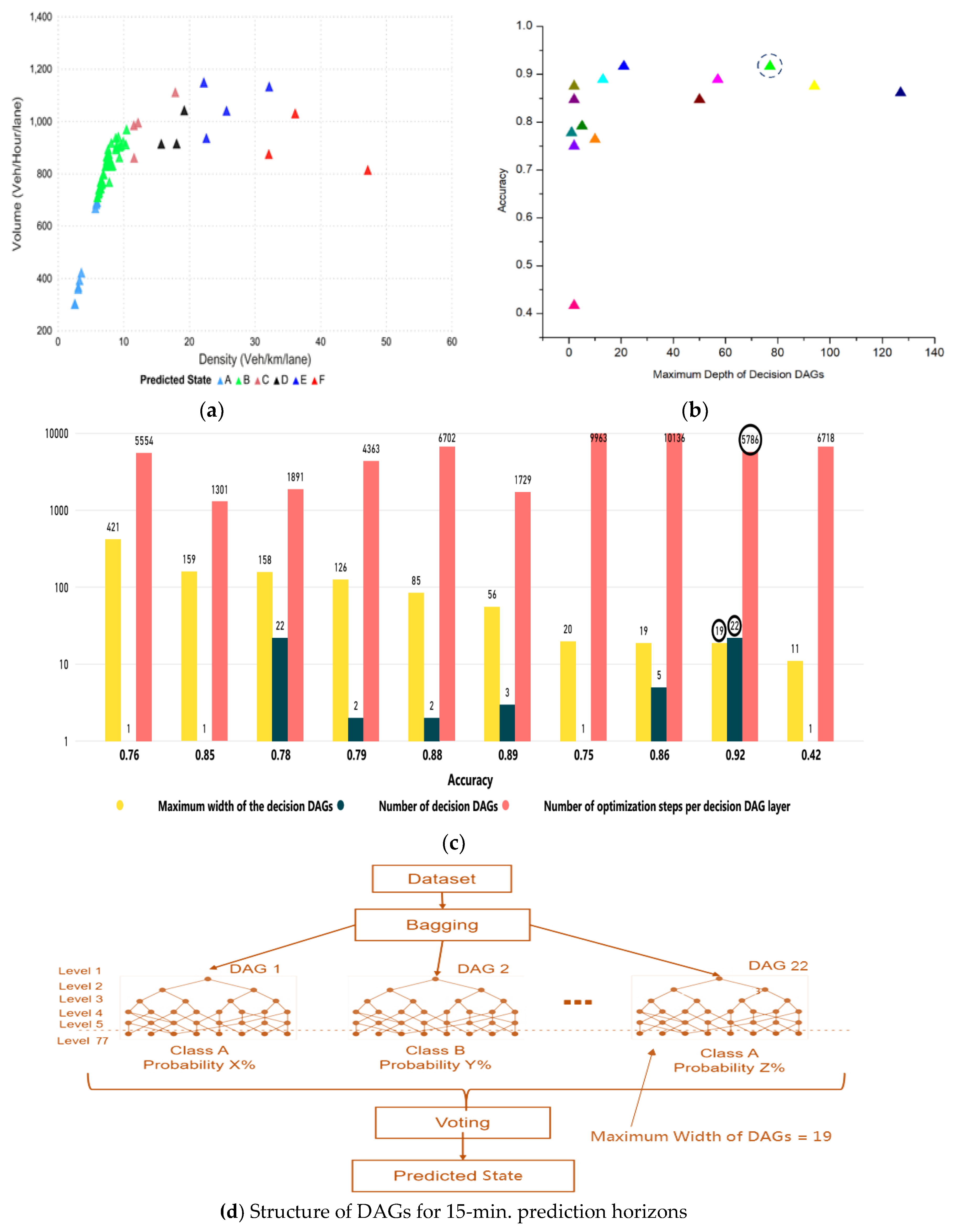
To assess the freeway operations, level-of-service (LOS), a commonly used performance indicator, was used for qualitative evaluation purposes. The data collected from the VISSIM simulation was further divided into six levels [
72], wherein the LOS defines the traffic state of each level. Traffic state is usually characterized by traffic-density on a given link, and is directly related with the number of vehicles occupying the roadway segment. It also represents the transient boundary conditions between two LOS levels. Moreover, to test the efficacy, classification models were built in python scripting orange software and azure machine learning to write the required procedures for extracting the traffic parameters, and level-of-service corresponded to highway capacity manual (HCM) [
43,
73]. The data points (in
Figure 7) represent different points in time distributed spatially, which together define the LOS at the road segment. In the mentioned figure, different colors showed the states for 15 min, which is actually the LOS divided into six sub-levels based on density along the highway segment. We termed these levels as different states (from A to F) and further evaluated them for 5, 10, and 15 min intervals. Since stratified K-fold cross validation was opted to address the issue of imbalance data, the method aimed to choose the proportionate frequencies for each LOS class. Thus, it is likely that label D or any other label will be associated with true representative class. The actual density–flow captured on a segment of the Second Ring was simulated in VISSIM for a prediction horizon of 15 min and is shown in
Figure 7.
6. Model Comparison
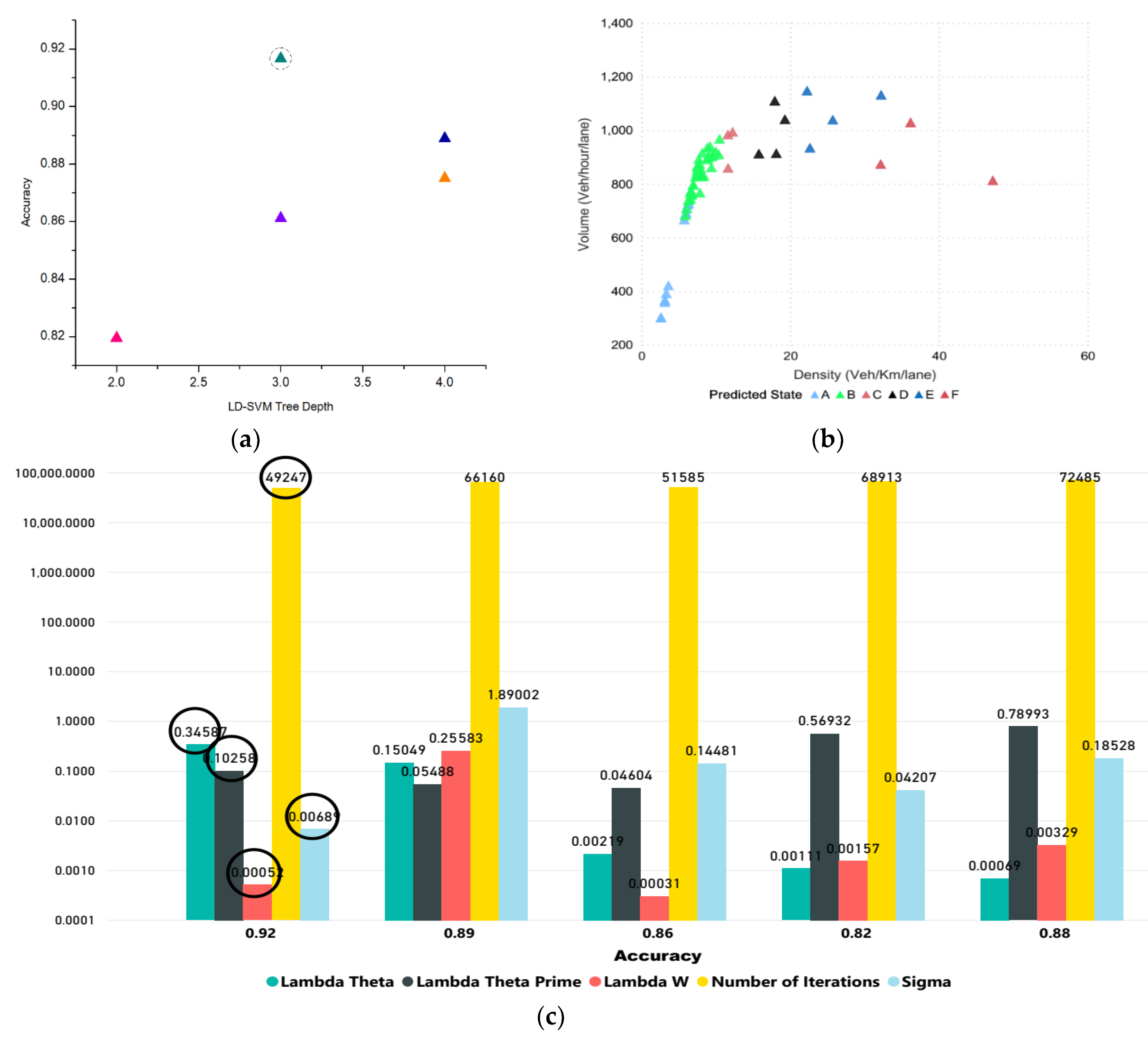
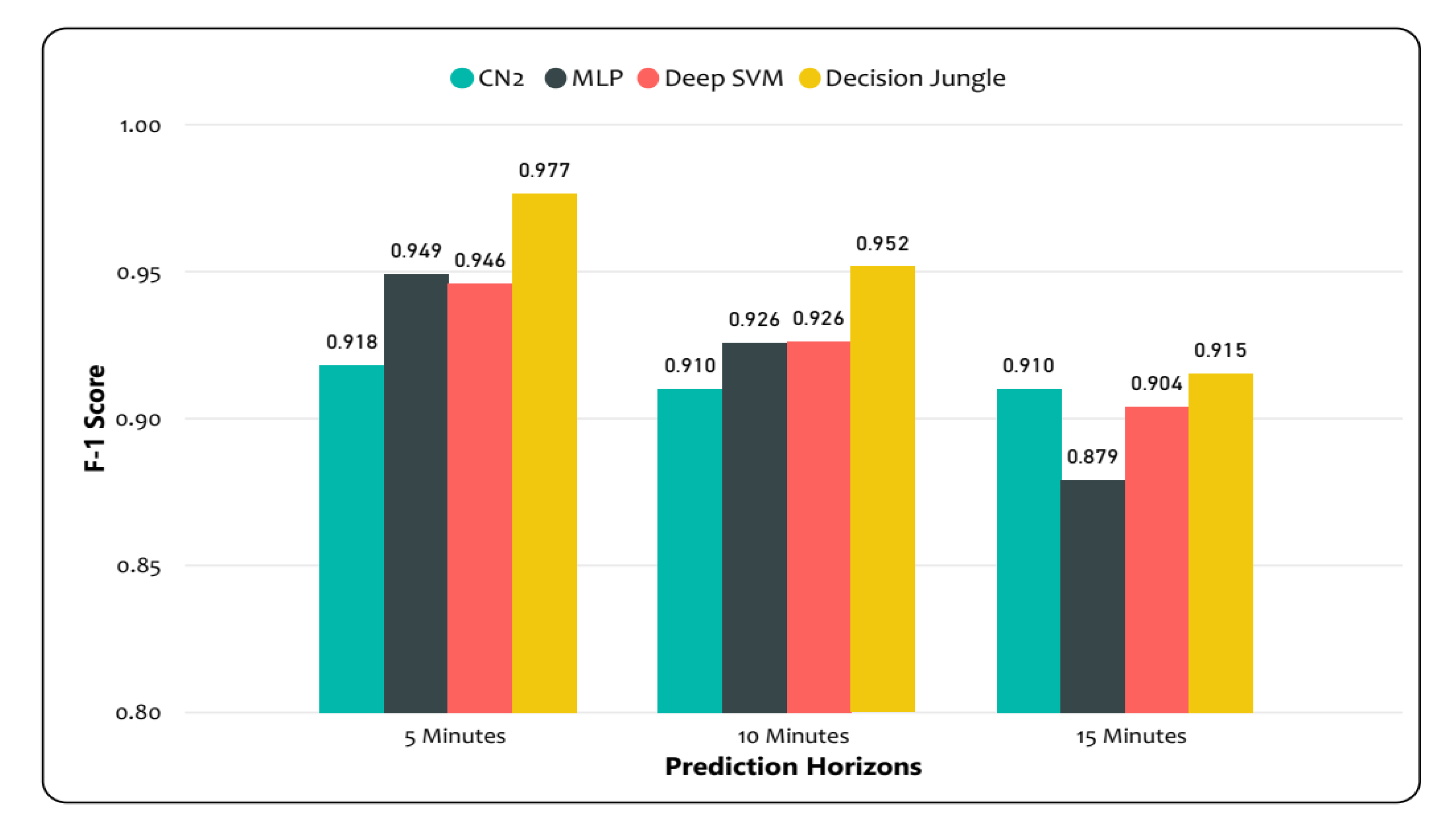
The weighted average F-1 score and accuracy were evaluated in order to assess the performances of different models. The results suggest that decision jungles outperformed the LD-SVM, CN2, and MLP, as shown in
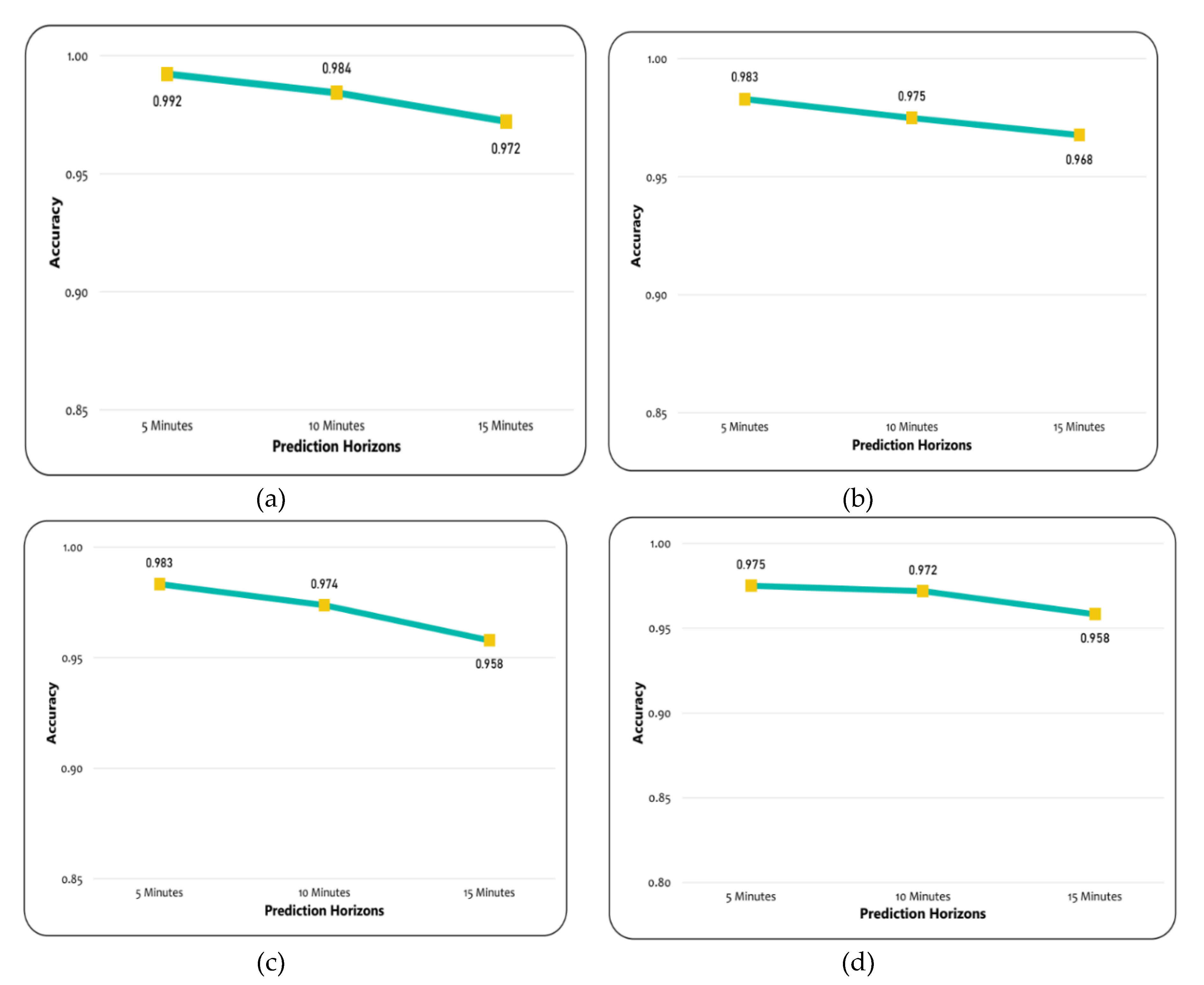
Figure 12. Additionally, the decision jungles and LD-SVM achieved a higher weighted average F-1 score. In particular, the decision jungle was found to have improved results over the LD-SVM, CN2, and MLP, and obtained high F-1 scores of 0.9777, 0.952, and 0.915 were predicated for time horizons of 15, 10, and 5 min, respectively. Similarly, the LD-SVM was slightly better than the MLP and CN2 as the F1-score was higher (0.904, 0.926, 0.946) for the 15, 10, and 5 min prediction horizons. However, the CN2 rule induction performed better, except for decision jungles, while the other models failed to achieve a higher F–1 score for the same prediction horizon. On the other hand,
Figure 13a,b shows that decision jungles and LD-SVM also achieved higher accuracy when compared to the remaining models such as CN2 rule induction and MLP. It can be noted that as the prediction horizons increases, the F-1 score and accuracy decreases. This indicates that decision jungles were stable when compared to the results in accordance with time horizons of 15, 10, and 5. Unlike the LD-SVM, MLP and CN2 were found to be less effective at maintaining the stability of accuracy in different time horizons. However, the CN2 rule induction in
Figure 13c,d) performed well and provided stable results only for the 10, and 15 min prediction horizons.
The experimental results are summarized in
Table 4 and
Table 5, where the models’ performances were computed using F-1 score and the average accuracy for different prediction horizons, respectively. It can be clearly seen that decision jungles achieved a higher F-1 score and gained a higher accuracy when compared to the other models for different prediction horizons. This shows that decision jungles achieved an average improvement of 95% and outperformed the remaining models. However, the LD-SVM performed better than the MLP and CN2 rule induction.
7. Conclusions
In this study, we improvised machine learning models with hyperparameter tuning optimization for short term TSP. Different schemes offered in parameter tuning were examined by performing the number of simulation iterations incurring different random seeds to ensure that the model worked efficiently under a real-time scenario. To do so, a comprehensive demonstration and the ability of different machine learning models were evaluated using different forecasting time-intervals at distinct time scales. The short-term traffic state was taken as a function of level-of-service (LOS) on a basic freeway segment along Second Ring Road in Beijing, China. Simulation of a transportation road demonstrated that decision jungles were more efficient and stable at different predicted horizons (time intervals) than the LD-SVM, MLP, and CN2 rule induction. Data utilized in this study was collected from traffic simulator VISSIM. Actual density–flow was captured on freeway segment via different prediction horizons of 15, 10, and 5 min. The experimental results showed and demonstrated the superior and robust performance of decision jungles compared to the LD-SVM, CN2 rule induction, and MLP. The overall performance of prediction results were improved by over 95 percent on average, which led to an accuracy of 0.982 and 0.975 for the decision jungle and LD-SVM. Moreover, the prediction performance for CN2 rule induction were also observed to be improved based on if–then rules in terms of the traffic patterns for different prediction horizons.
This study has some limitations that must be acknowledged. First, the proposed study was deployed in a developed urban freeway network model, so the simulated data need to be enhanced in future studies. Second, instead of justifying the efficacy of the suggested techniques using microscopic simulation platform via VISSIM, forthcoming studies may focus on investigating and verifying the performance of proposed methods with an improved model on real traffic data.
In the future, studies may focus on long-term traffic state prediction (hours, days, weeks), which could also be divided into different LOS groups. The study area can be extended from the basic freeway segment to weaving, merging, and diverging segments that cover the entire network range of the Second Ring Road. Studies could incorporate temperature, air quality, weather, and other external factors that are likely to affect travel demand, thus, enhance prediction accuracy. In addition, it could rely on considering larger and various types of traffic datasets to analyze various combinations of flow, occupancy, speed, and other characteristics of road traffic to improve the predictive accuracy by using improved machine learning methods for prediction and analytics.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













