Design and Development of Magnetostrictive Actuators and Sensors for Structural Health Monitoring

Abstract
:1. Introduction
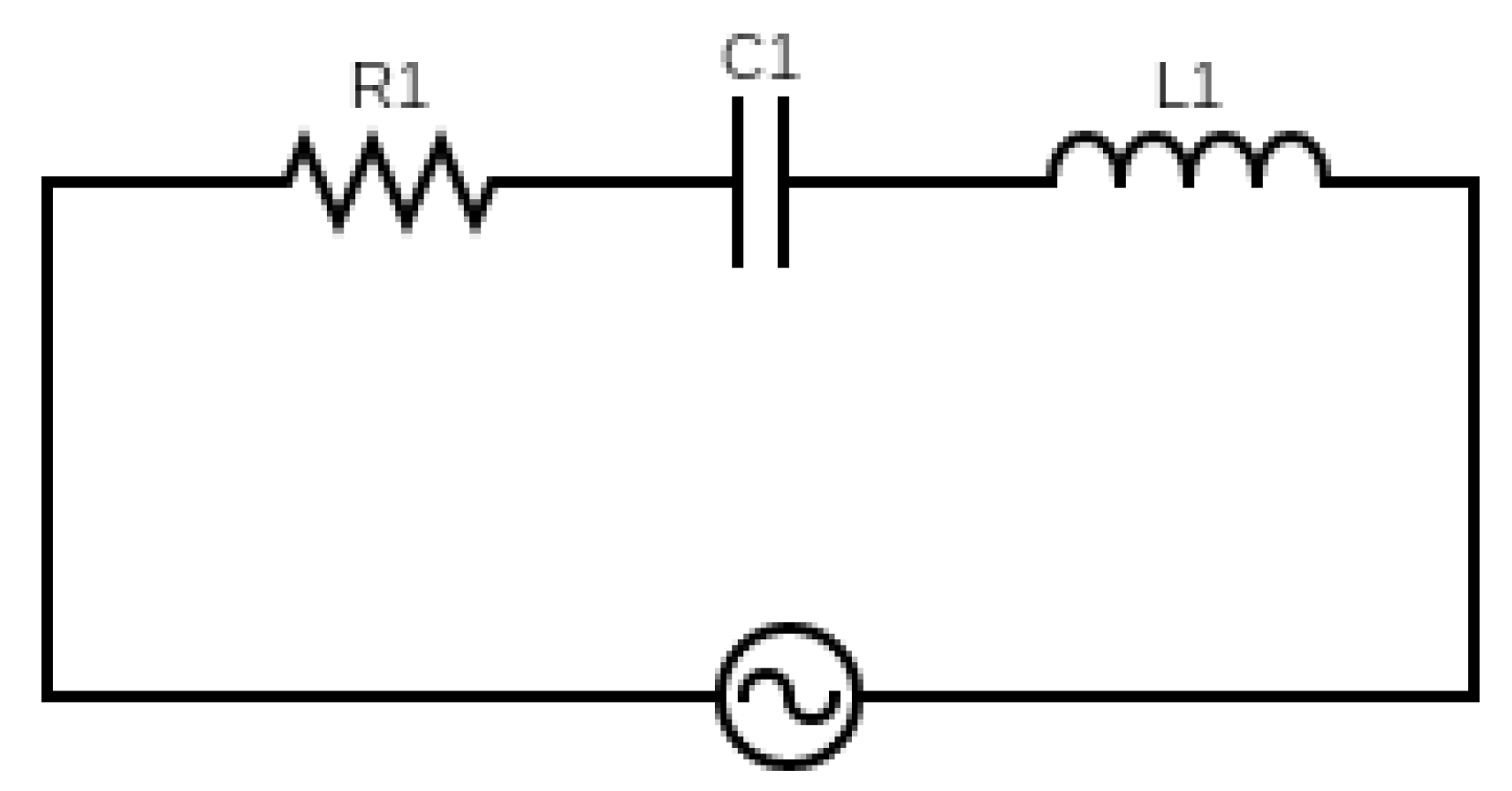
2. RLC Circuit for Damage Sensing
3. Materials and Methods
3.1. Characterisation of RLC Circuit
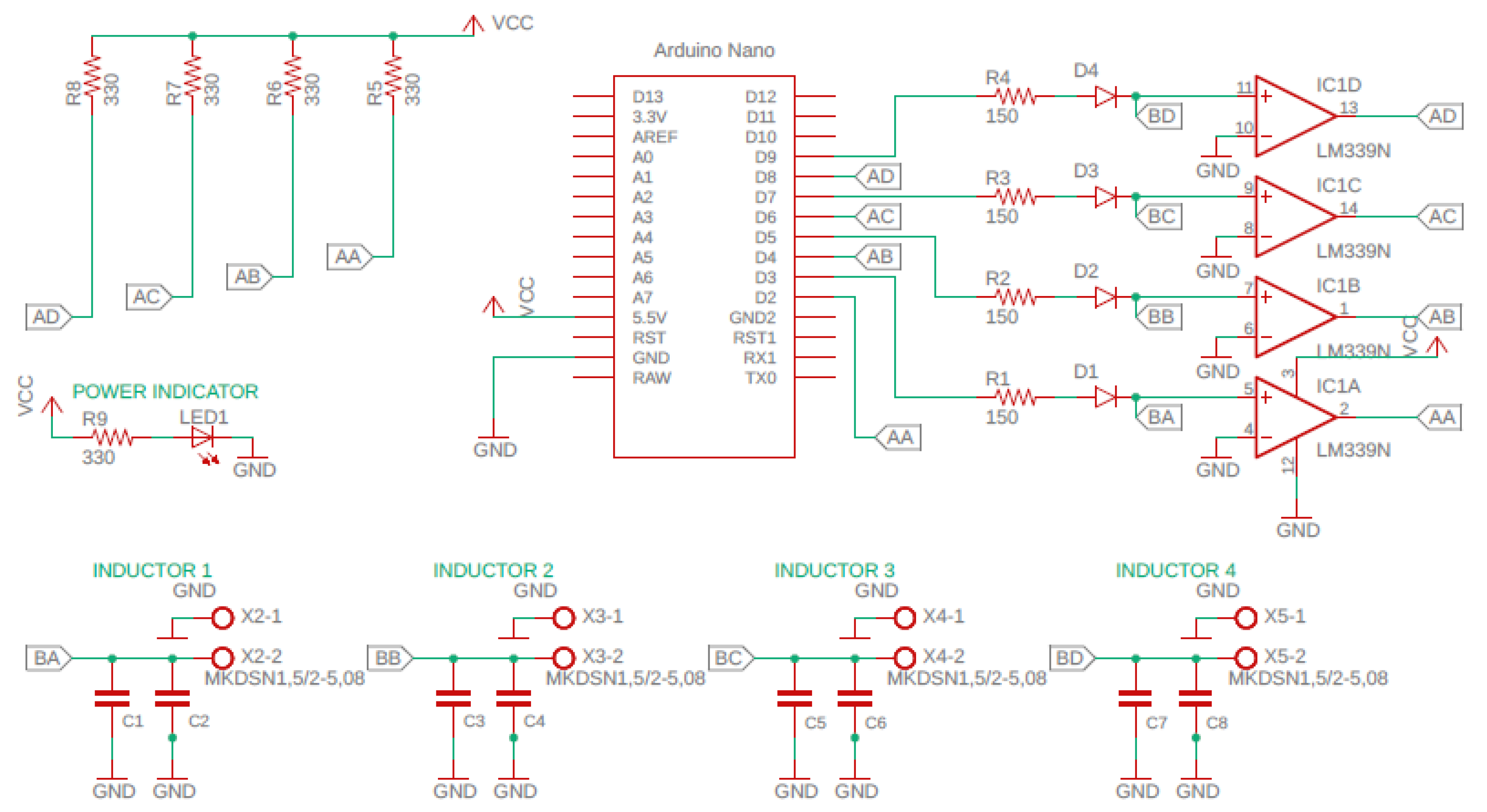
3.2. Inductance Sensors and Data Acquisition
3.3. Sample Fabrication
4. Experimental Testing
4.1. SHM Schema
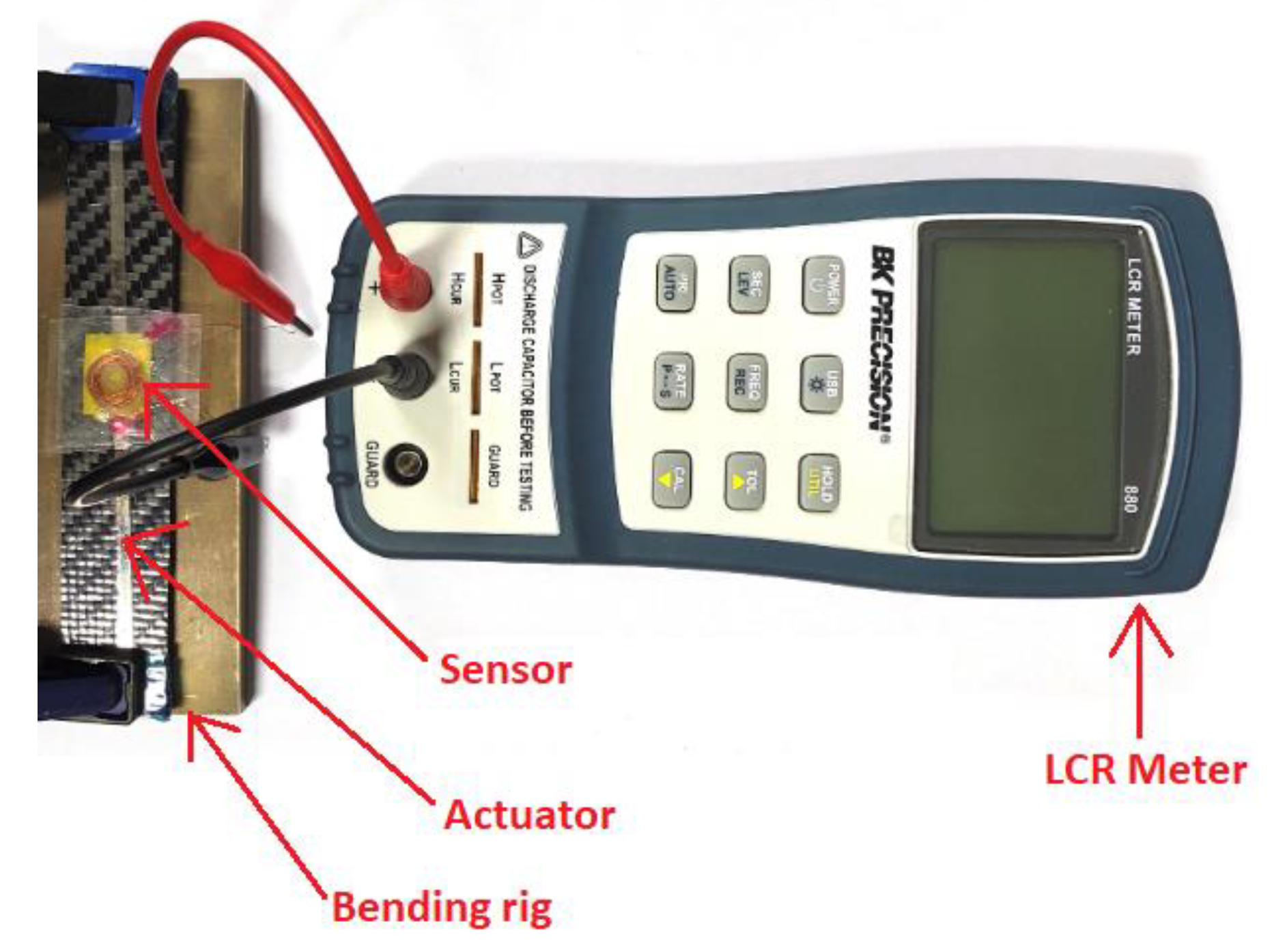
4.2. Experimental Setup
5. Results and Discussion
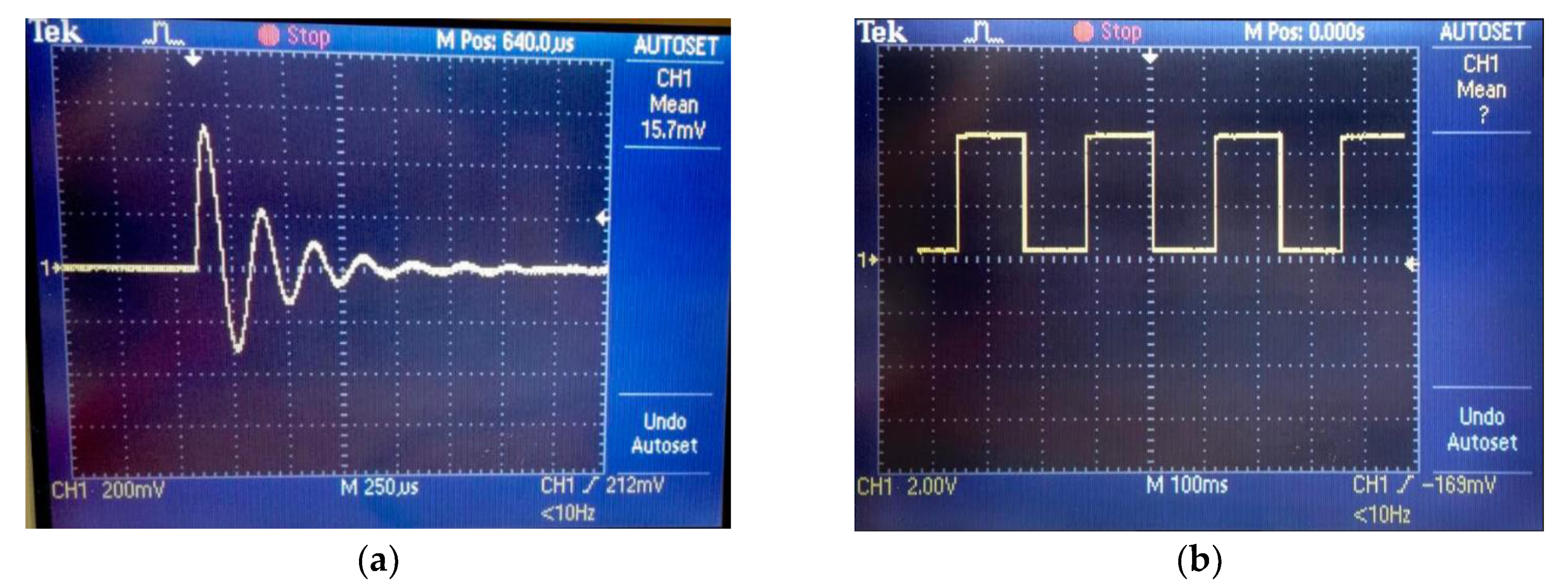
5.1. Validating Fabricated Sensor Electronics
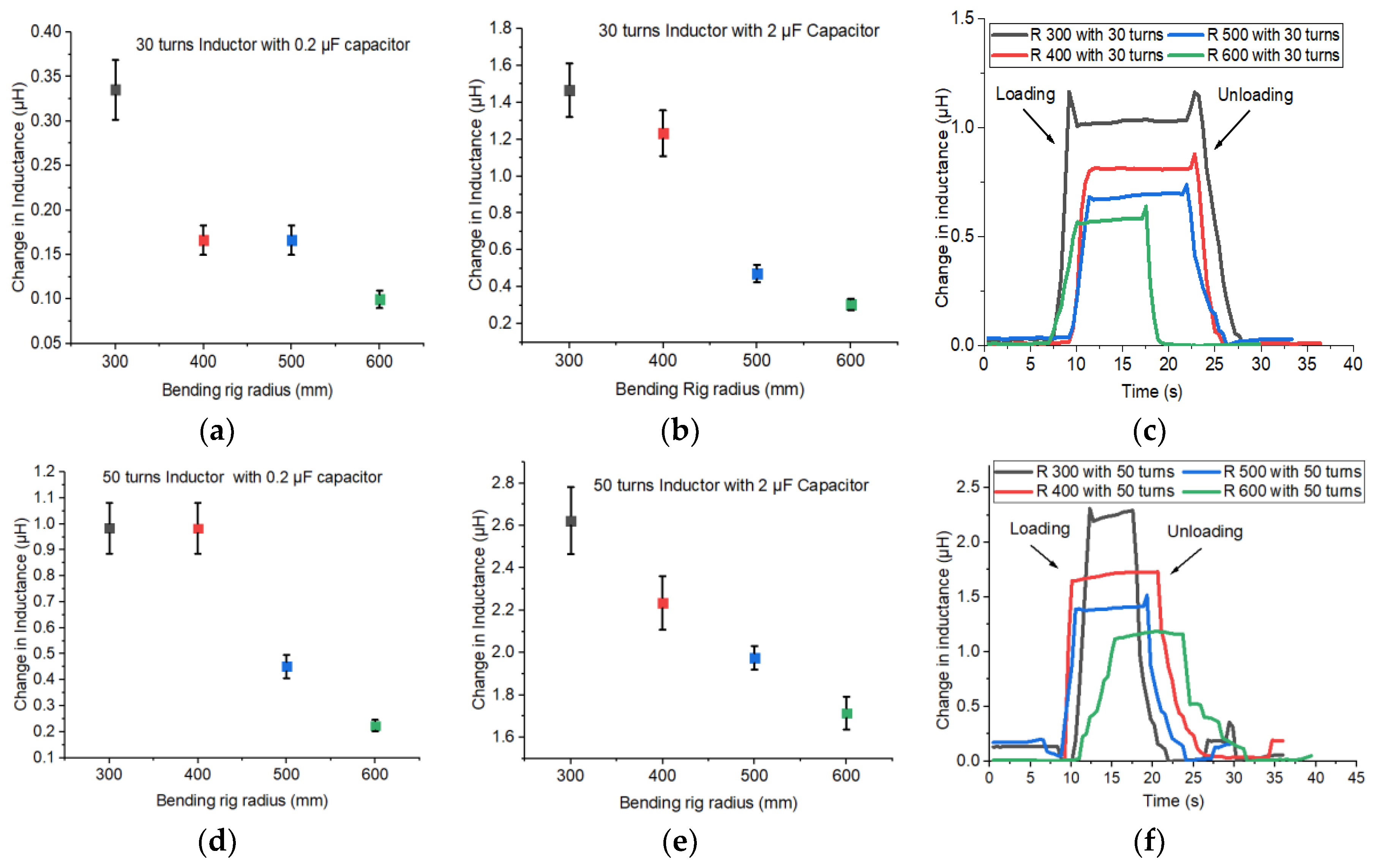
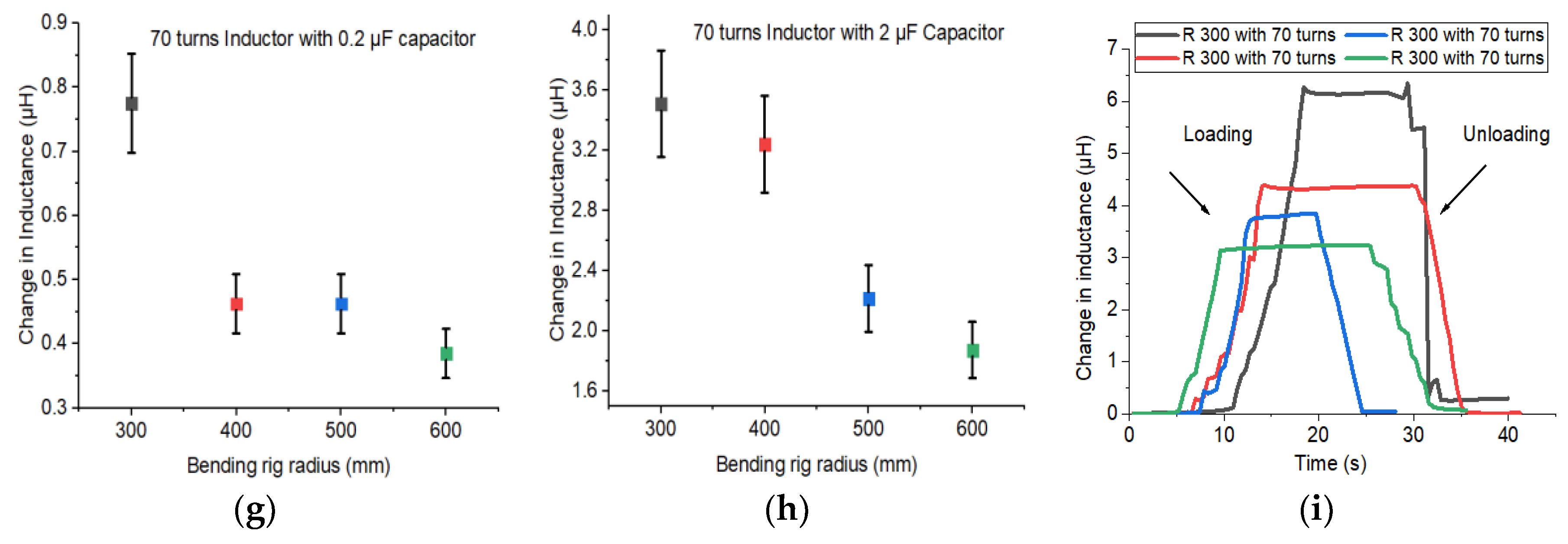
5.2. Change in Inductance During Loading and Unloading
6. Potential Applications
7. Limitations and Future Possible Evolution
8. Conclusions
- (1)
- We investigated possible LC combinations to determine damping and frequency responses. We found that the 200 μF capacitor was not suitable as it gave overdamped response for all the inductors. The 2 μF was chosen as the capacitor for the data acquisition system as it gave the best sensitivity results for all sensors in the bending rig test.
- (2)
- Copper-coil inductors (sensors) were fabricated, tested and compared alongside off-the-shelf inductor coils. From the results, the fabricated sensors gave best change in inductance in the bending rig test. The off-the-shelf Farnell inductor gave very noisy results when tested with the RLC meter. However, using a shielded inductor in series with it gave a better result.
- (3)
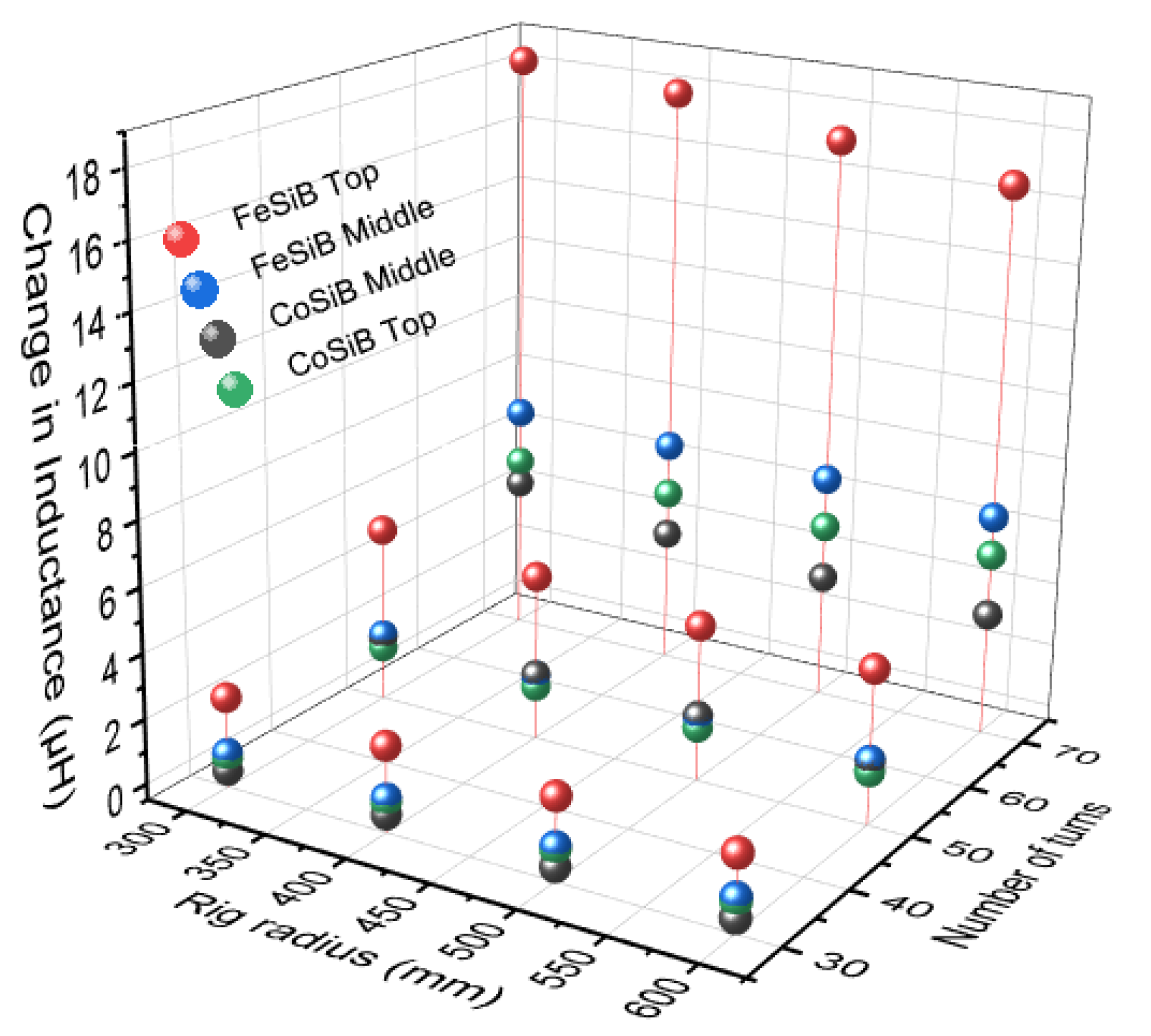
- The efficacy of FeSiB and CoSiB as magnetostrictive ribbon actuators were investigated utilising the fabricated setup. FeSiB gave the maximum change in inductance as compared to CoSiB in the bending rig tests.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- William, C.T. Thermal and Electrical Conduction in Metal Matrix Composites. Compr. Compos. Mater. II 2018, 4–8, 188–212. [Google Scholar] [CrossRef]
- Giurgiutiu, V. Structural Health Monitoring of Aerospace Composites; Academic Press: Cambridge, MA, USA, 2015. [Google Scholar] [CrossRef]
- Garg, A.C. Delamination-a Damage Mode in Composite Structures. Eng. Fract. Mech. 1988, 29, 557–584. [Google Scholar] [CrossRef]
- Yuan, F.G. Structural Health Monitoring (SHM) in Aerospace Structures; Woodhead Publishing: Cambridge, UK, 2016. [Google Scholar] [CrossRef]
- Haile, M.A.; Hall, A.J.; Yoo, J.H.; Coatney, M.D.; Myers, O.J. Detection of Damage Precursors with Embedded Magnetostrictive Particles. J. Intell. Mater. Syst. Struct. 2016, 27, 1567–1576. [Google Scholar] [CrossRef]
- Farrar, C.R.; Lieven, N.A.J. Damage Prognosis: The Future of Structural Health Monitoring. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2007, 365, 623–632. [Google Scholar] [CrossRef]
- Hall, A.J.; Brennan, R.E.I.; Ghoshal, A.; Liu, K.C.; Coatney, M.; Haynes, R.; Bradley, N.; Weiss, V.; Tzeng, J. Damage Precursor Investigation of Fiber Reinforced Composite Materials under Dynamic Cyclic Loads. In Proceedings of the 9th International Workshop on Structural Health Monitoring, Stanford, CA, USA, 10–12 September 2013; Volume 1, p. 9. [Google Scholar]
- Zhou, G.; Sim, L.M. Damage Detection and Assessment in Fibre-Reinforced Composite Structures with Embedded Fibre Optic Sensors-Review. Smart Mater. Struct. 2002, 11, 925–939. [Google Scholar] [CrossRef]
- Kessler, S.S. Piezoelectric-Based In-Situ Damage Detection of Composite Materials for Structural Health Monitoring Systems. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2002. [Google Scholar]
- Leung, Z.; Al-Taher, A.; Chan, L.; Walters, N.; McGahan, M.; Hayes, S.; Lupu, N.; Murgulescu, I.; Morley, N. Structural Health Monitoring Using Magnetostrictive Sensors. In Proceedings of the 2017 IEEE International Magnetics Conference (INTERMAG), Dublin, Ireland, 24–28 April 2017. [Google Scholar] [CrossRef]
- Hristoforou, E.; Ktena, A. Magnetostriction and Magnetostrictive Materials for Sensing Applications. J. Magn. Magn. Mater. 2007, 316, 372–378. [Google Scholar] [CrossRef]
- Ekreem, N.B.; Olabi, A.G.; Prescott, T.; Rafferty, A.; Hashmi, M.S.J. An Overview of Magnetostriction, Its Use and Methods to Measure These Properties. J. Mater. Process. Technol. 2007, 191, 96–101. [Google Scholar] [CrossRef]
- Monkman, G. Magnetic Sensors. Sens. Rev. 1998, 18, 216–217. [Google Scholar] [CrossRef]
- Apicella, V.; Clemente, C.S.; Davino, D.; Leone, D.; Visone, C. Self-Sensing Estimation of Mechanical Stress in Magnetostrictive Actuators. IEEE Trans. Magn. 2019, 55, 1–5. [Google Scholar] [CrossRef]
- Rudd, J.; Myers, O. Experimental Fabrication and Nondestructive Testing of Carbon Fiber Beams for Delaminations Using Embedded Terfenol-D Particles. J. Intell. Mater. Syst. Struct. 2018, 29, 600–609. [Google Scholar] [CrossRef]
- Christopoulos, A.; Hristoforou, E.; Koulalis, I.; Tsamasphyros, G. Inductive Strain Sensing Using Magnetostrictive Wires Embedded in Carbon Fibre Laminates. Smart Mater. Struct. 2014, 23. [Google Scholar] [CrossRef]
- Krishnamurthy, A.V.; Anjanappa, M.; Wang, Z.; Chen, X. Sensing of Delaminations in Composite Laminates Using Embedded Magnetostrictive Particle Layers. J. Intell. Mater. Syst. Struct. 1999, 10, 825–835. [Google Scholar] [CrossRef]
- Ghosh, D.P.; Gopalakrishnan, S. Structural Health Monitoring in a Composite Beam Using Magnetostrictive Material through a New FE Formulation. In Proceedings of the Smart Materials, Structures, and Systems, Bangalore, India, 14 October 2003; p. 704. [Google Scholar] [CrossRef]
- Narita, F. Inverse Magnetostrictive Effect in Fe29Co71 Wire/Polymer Composites. Adv. Eng. Mater. 2017, 19, 1–6. [Google Scholar] [CrossRef]
- Tan, P.; Tong, L. Multiple Delamination Detection of a Composite Beam Using Magnetostrictive Patch. AIAA J. 2006, 44, 2547–2551. [Google Scholar] [CrossRef]
- Tan, P.; Tong, L. Delamination Detection of a Laminated Beam Using Magnetostrictive Composite Sensor and Actuator. J. Reinf. Plast. Compos. 2007, 26, 831–846. [Google Scholar] [CrossRef]
- Zeinedini, A.; Shokrieh, M.M.; Ebrahimi, A. The Effect of Agglomeration on the Fracture Toughness of CNTs-Reinforced Nanocomposites. Theor. Appl. Fract. Mech. 2018, 94, 84–94. [Google Scholar] [CrossRef]
- Meeks, S.W.; Hill, J.C. Piezomagnetic and Elastic Properties of Metallic Glass Alloys Fe 6 7 CO 1 8 B 1 4 Si 1 and Fe 8 1 B 13.5 Si 3.5 C 2. J. Appl. Phys. 2003, 54, 6584–6593. [Google Scholar] [CrossRef]
- Murgulescu, I.; Lafferty, A.D.; Al-Taher, A.; Morley, N.A.; Reiss, R.W.; Hayes, S.A.; Lupu, N. Magnetostrictive Materials for Aerospace Applications. J. Phys. Conf. Ser. 2017, 903, 012010. [Google Scholar] [CrossRef]
- Kabacoff, L.T.; Wun-Fogle, M. Magnetomechanical Properties of Flash Annealed Metglas 2605 SC. J. Appl. Phys. 1985, 57, 3499–3501. [Google Scholar] [CrossRef]
- Anderson, P.M., III. Magnetomechanical Coupling, ΔE Effect, and Permeability in FeSiB and FeNiMoB Alloys. J. Appl. Phys. 2003, 53, 8101–8103. [Google Scholar] [CrossRef]
- Chen, X.; Anjanappa, M. Health Monitoring of Composites Embedded with Magnetostrictive Thick Film without Disassembly. Smart Mater. Struct. 2006, 15, 20–32. [Google Scholar] [CrossRef]
- Tumanski, S. Induction Coil Sensors—a Review. Meas. Sci. Technol. 2007, 18, R31–R46. [Google Scholar] [CrossRef]
- Scherz, P.; Monk, S. Practical Electronics for Inventors, 4th ed.; McGraw-Hill Education: New York, NY, USA, 2016. [Google Scholar] [CrossRef]
- Clarke, R. An introduction to the air cored coil. Available online: http://info.ee.surrey.ac.uk/Workshop/advice/coils/air_coils.html#top (accessed on 27 January 2020).
- Keller, F.J.; Gettys, W.E.; Skove, M.J. Physics, Classical and Modern; McGraw-Hill: New York, NY, USA, 1993; p. 699. [Google Scholar]
- Leung, Z.; Al-Taher, A.; Chan, L.; Walters, N.; McGahan, M.; Hayes, S.; Nupu, N.; Murgules, I.; Morley, N. Structural Health Monitoring Using Magnetostrictive Sensors. In Proceedings of the 2018 IEEE International Magnetics Conference (INTERMAG), Singapore, 23–27 April 2018; pp. 1–5. [Google Scholar]
- Tsutsui, H.; Kawamata, A.; Sanda, T.; Takeda, N. Detection of Impact Damage of Stiffened Composite Panels Using Embedded Small-Diameter Optical Fibers. Smart Mater. Struct. 2004, 13, 1284–1290. [Google Scholar] [CrossRef]
- Di Sante, R. Fibre Optic Sensors for Structural Health Monitoring of Aircraft Composite Structures: Recent Advances and Applications. Sensors 2015, 15, 18666–18713. [Google Scholar] [CrossRef]
- Taylor, S.G.; Park, G.; Farinholt, K.M.; Todd, M.D. Diagnostics for Piezoelectric Transducers under Cyclic Loads Deployed for Structural Health Monitoring Applications. Smart Mater. Struct. 2013, 22. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. of Turns of Copper Coil | Inductance (μH) |
|---|---|
| 30 | 14.7 |
| 50 | 35.6 |
| 70 | 64.3 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vincent, J.D.S.; Rodrigues, M.; Leong, Z.; Morley, N.A. Design and Development of Magnetostrictive Actuators and Sensors for Structural Health Monitoring. Sensors 2020, 20, 711. https://doi.org/10.3390/s20030711
Vincent JDS, Rodrigues M, Leong Z, Morley NA. Design and Development of Magnetostrictive Actuators and Sensors for Structural Health Monitoring. Sensors. 2020; 20(3):711. https://doi.org/10.3390/s20030711
Chicago/Turabian StyleVincent, Jamin Daniel Selvakumar, Michelle Rodrigues, Zhaoyuan Leong, and Nicola A. Morley. 2020. "Design and Development of Magnetostrictive Actuators and Sensors for Structural Health Monitoring" Sensors 20, no. 3: 711. https://doi.org/10.3390/s20030711