A Novel Sensorised Insole for Sensing Feet Pressure Distributions

 , ,
, ,  , , ,
, , ,  ,
,  ,
,  , , and
, , and 
Abstract
:1. Introduction
2. Background
2.1. Mathematical Notation
- Let be the set of real numbers.
- Let denote an n-dimensional column vector, while x denotes a scalar quantity.
- Let be the Euclidean norm of the vector .
- Let be the zero matrix .
- Let be the identity matrix .
- Let , and denote the vertical ground reaction force and the moments about the horizontal axes, respectively.
- Let denote a variable referred to the i-th sensor.
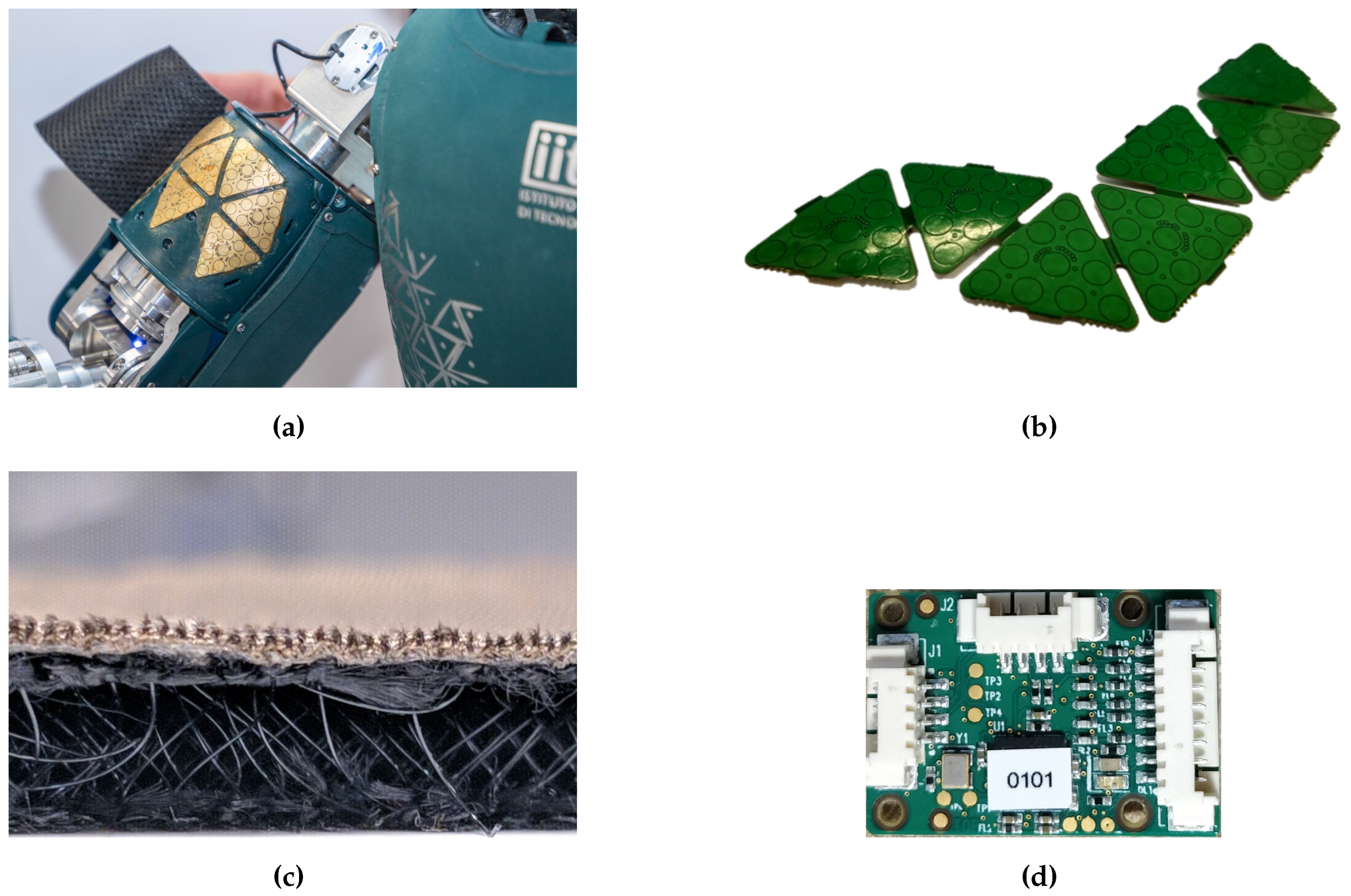
2.2. Tactile Sensors
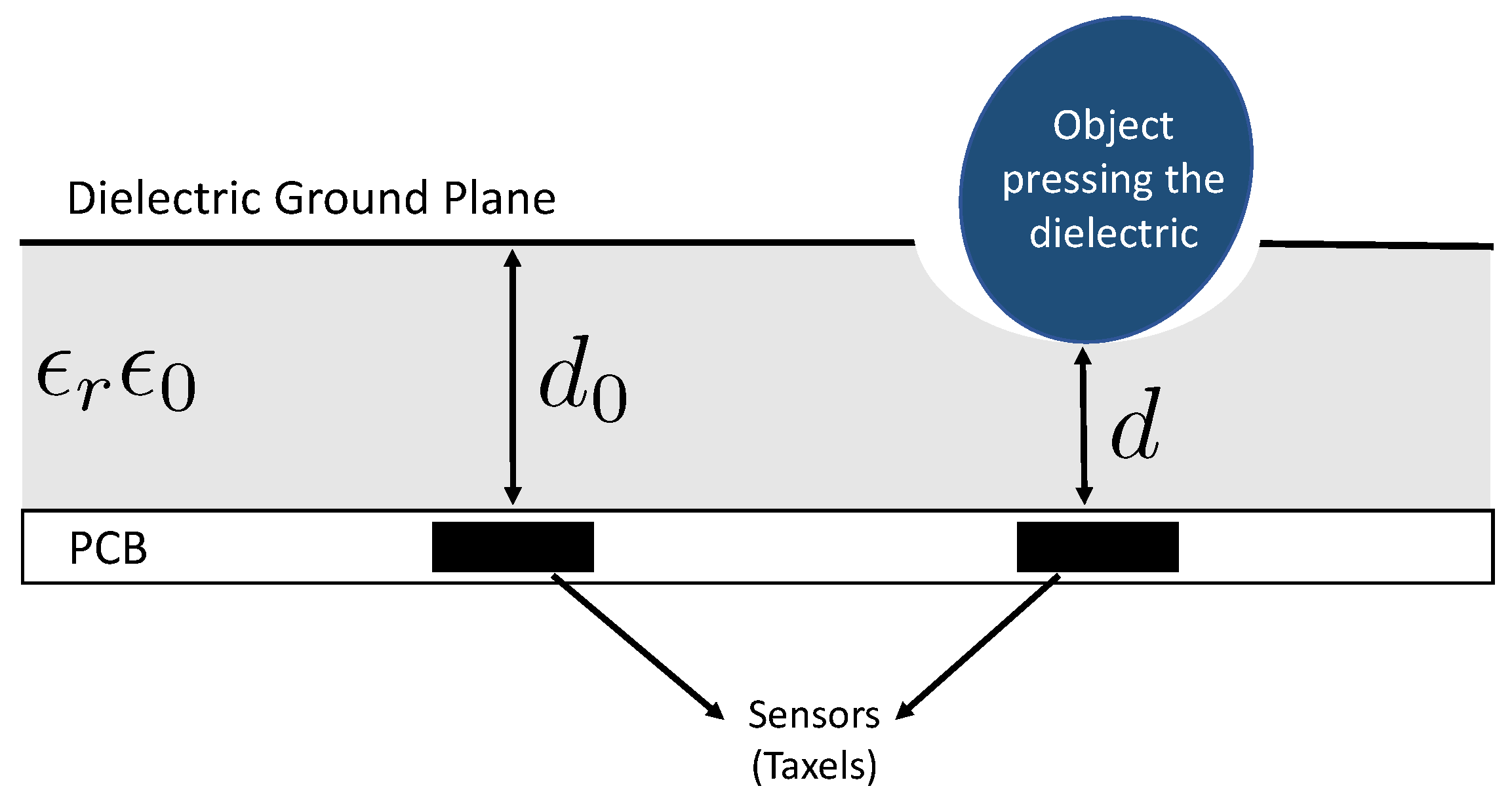
2.3. A Mathematical Model for Taxels
- -
- changes with the pressure because the quantity of air contained between the ground plane and the sensors decreases to zero (we can consider that beyond this point we are saturating the sensors);
- -
- k changes with the pressure and with time;
- -
- is not constant due to the hysteresis in the dielectric mechanical elasticity.
2.4. Recall on Skin Calibration
- The first setup (Figure 3a) consists of inserting the skin inside a Ziploc bag and pumping out air. This decreases the pressure in the bag and creates a uniform pressure distribution over the skin surface. The flow rate is regulated by using valves to ensure a slow and steady pace in order to avoid the dynamic effects of the dielectric material. The pressure reached on the skin is measured with a pressure sensor that sends data to a computer through a CAN network [28].
- The second setup uses an isolation chamber (Figure 3b). Contrary to the vacuum bag experiment explained above, the pressure is now increased in the external environment relative to the skin. The setup consists of an air compressor, the mentioned chamber, a pressure regulator and a micro-controller for pushing air and increasing the pressure inside the chamber [29].
3. Contribution
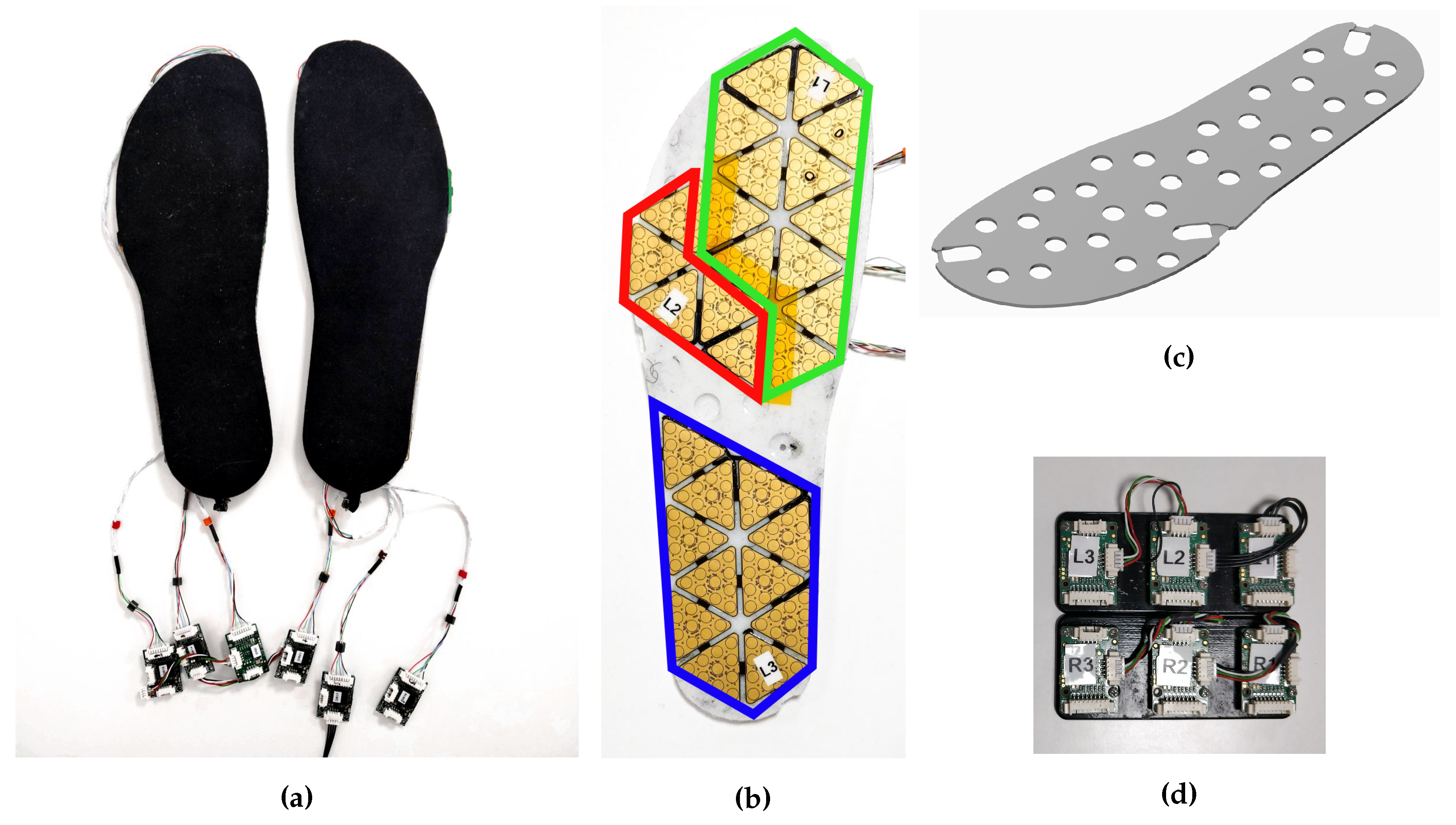
3.1. Insole Prototype
3.2. New Calibration Method
- The vacuum bag method can reach a maximum pressure of 1 Atm, which is not high enough for our application. We need higher pressures during the calibration in order to take data that is consistent with real working conditions. For instance, if we consider a person weighing standing still on a single foot heel, a vertical force of about 800 N is applied on a small area of the insole. This force is spread over 4~5 triangles. The area of each triangle is about m. Thus, recalling (3) and considering four triangles, the pressure on each sensor will be:
- The calibration setup based on the isolating vessel is not big enough to hold the proposed insole and can only reach a maximum pressure of 3 Atm.
3.3. Model Parameters Identification from the New Calibration Method
- -
- The quantities and to estimate in the model (9) are not linear with respect to the pressure and to find them we need to solve a non-linear optimisation problem;
- -
- Hypotheses for deriving the theoretical model are based on ideal behaviours, but the physical insole does not always respect the ideally hypotised case. Thus, a more general model helps to consider factors that we did not take into account in (9).
- -
- Variables to compare, force, moments and pressure have different order. Indeed, force can reach a value of about , moments can reach a value of about and pressure assumes values between 0 and .
- -
- The sample numbers of the two data sets (FT shoes data set and vacuum bag data set) is not the same because they come from different experiments.
4. Experiments and Validation
4.1. Experiments for Calibration and Validation
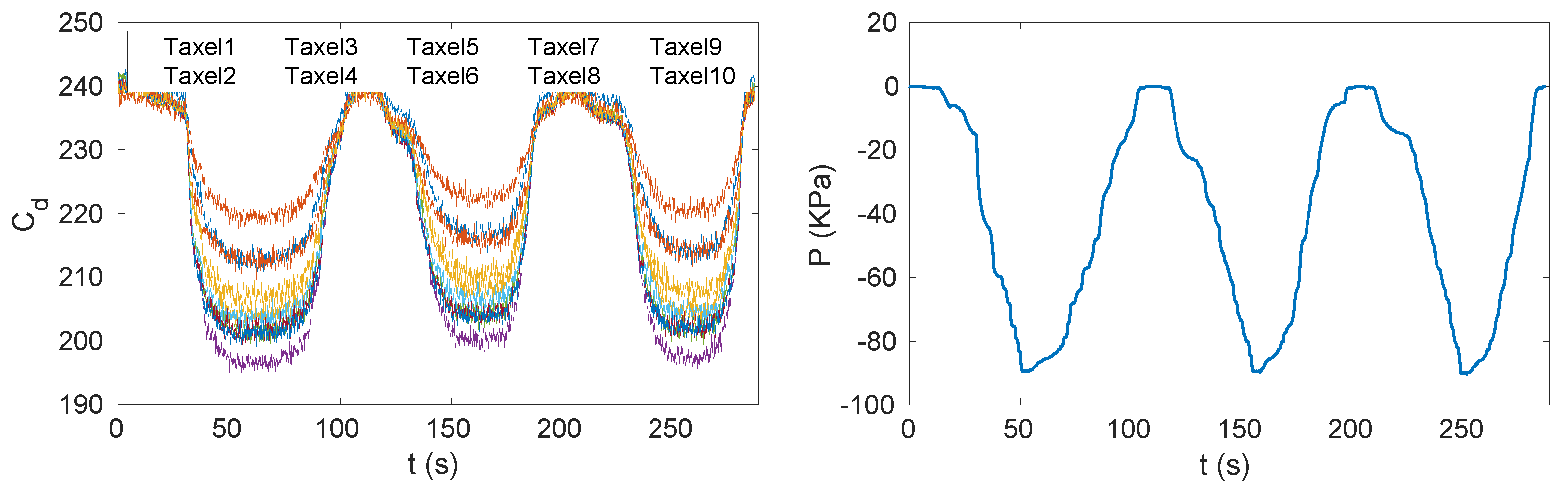
- One data set was collected using the setup described in Section 2.4. The experiments with a vacuum bag (Figure 5a) reached a pressure of 90 kPa and the pressure was uniformly distributed over the insole. The experiment consisted of three cycles of pressure reduction and increase (Figure 6). In Figure 6 we can see that the pressure was negative, which can be explained by the choice of the reference frame W that has the z axis pointing up. Indeed, in order to have compression, the force applied on each taxel has to be negative and as consequence of (3) even the pressure has to be negative. We can even observe that when the pressure increased the measured capacitance decreased. This is because the chips do not stream analog capacitances, as explained in Section 2.3, but the analog capacitances are mapped to a digital value at an 8-bit resolution and the relation (6). The mapping was inverse, that is, values from 255 to 240 indicate that the taxel was not pressed and 0 means that the taxel was measuring the highest analog capacitance that is possible to map with 8 bits.
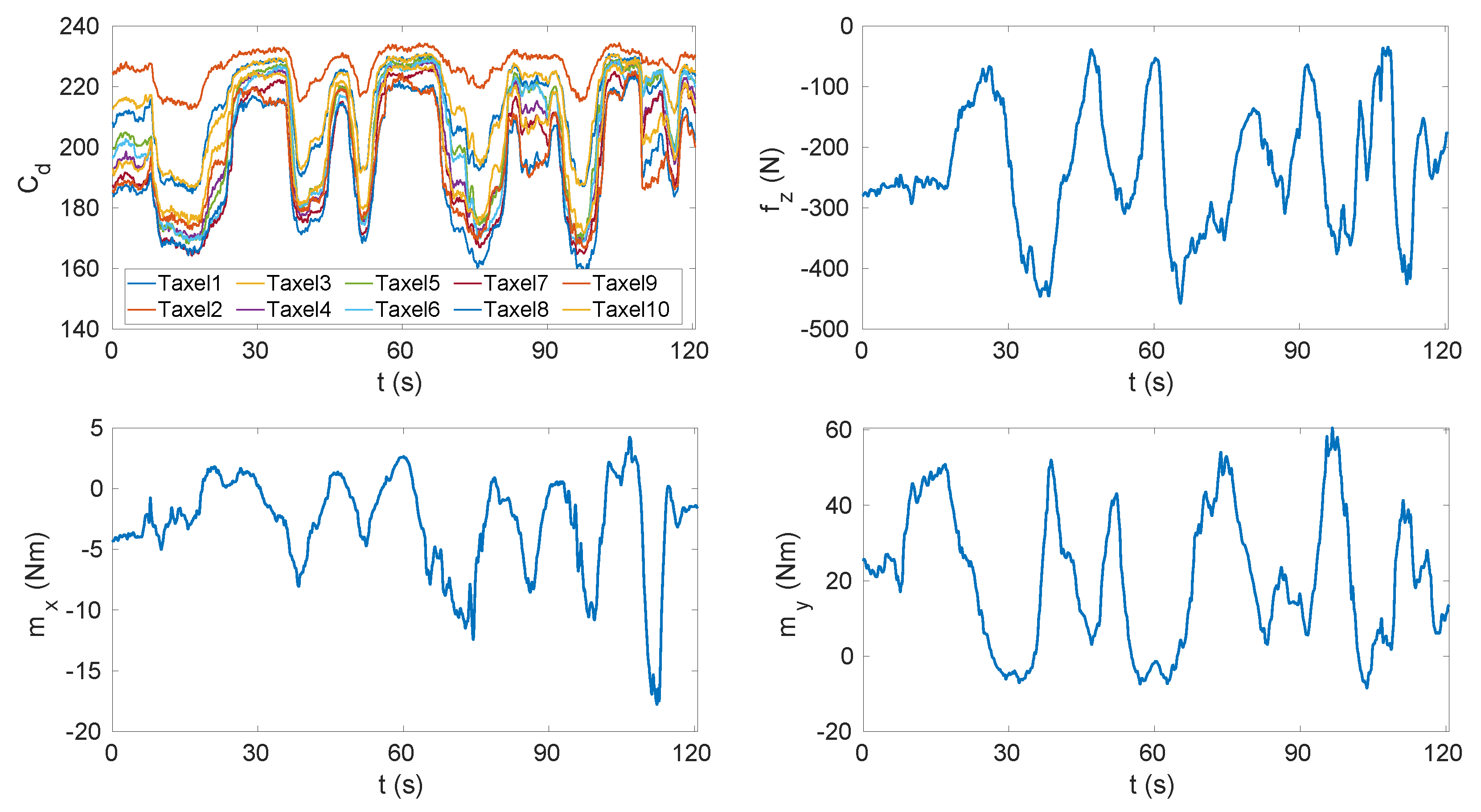
- Another data set was taken using a pair of sensorised shoes developed at IIT (Figure 5b). Each shoe was equipped with two six-axis FT sensors by the iCub group at Istituto Italiano di Tecnologia (IIT) [35], able to measure the forces and moments. As mentioned in Section 3.2, the data sets had different features in order to excite the activation of the taxels as much as possible in order to obtain different combinations to cover the entire capacitance range of each sensor (Figure 7).
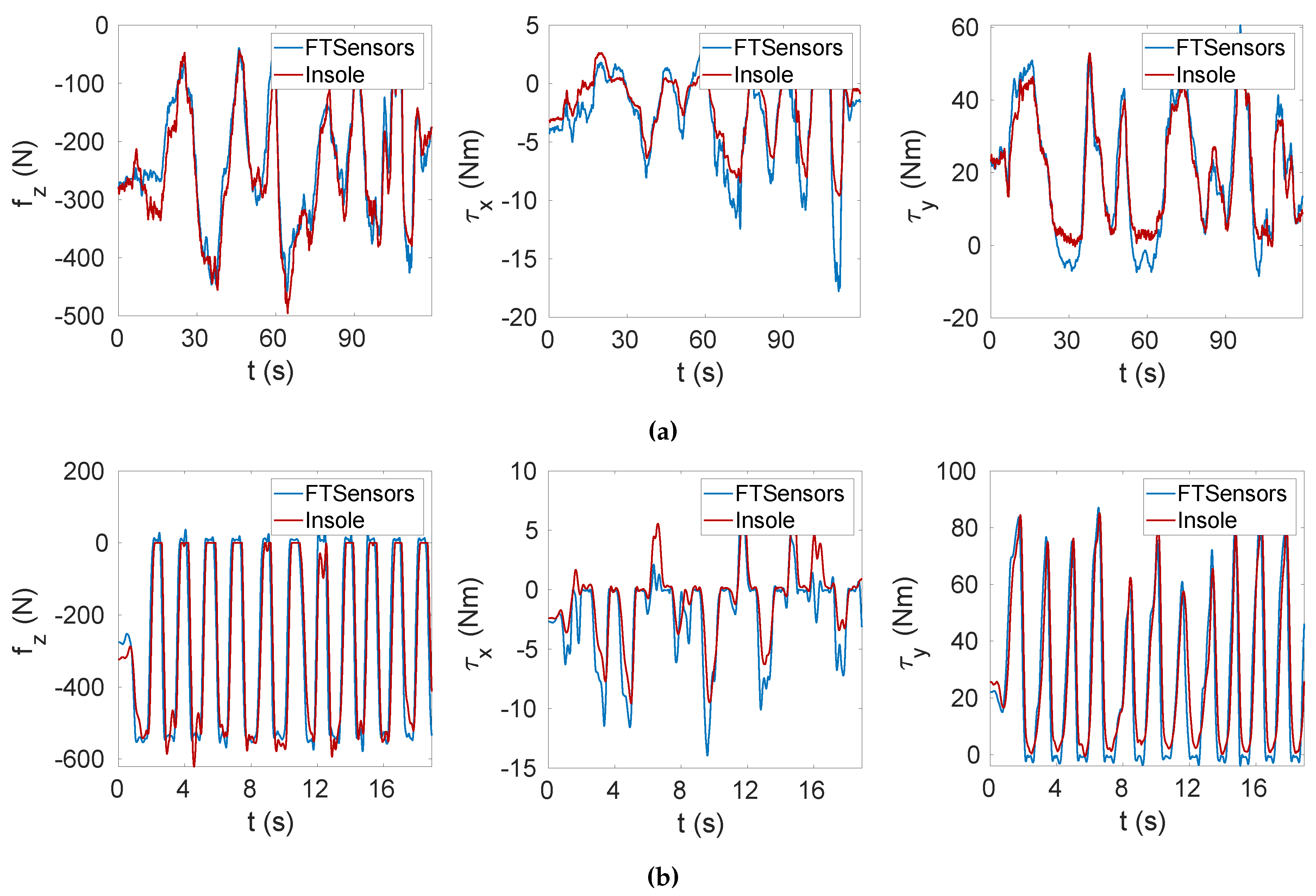
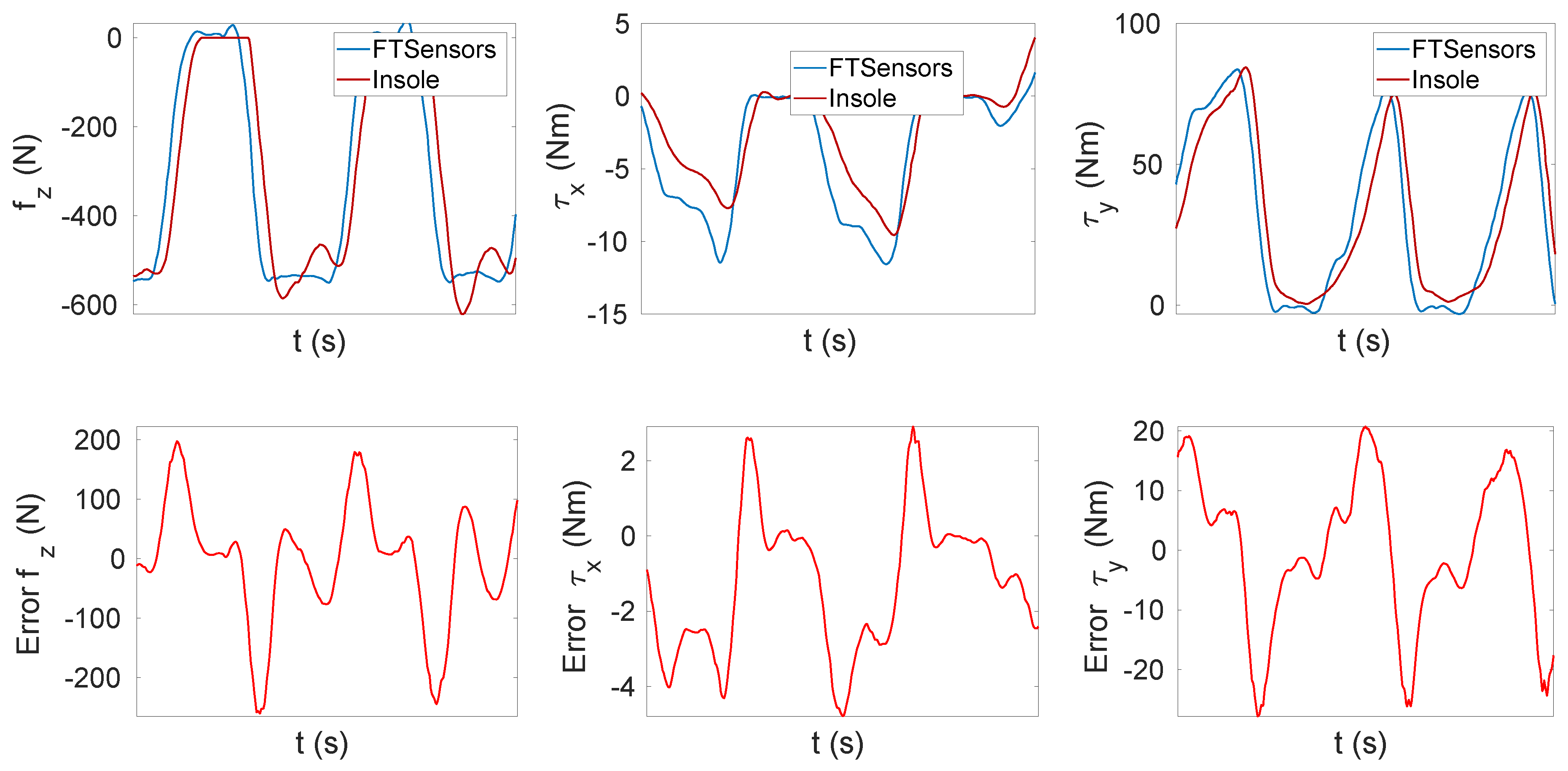
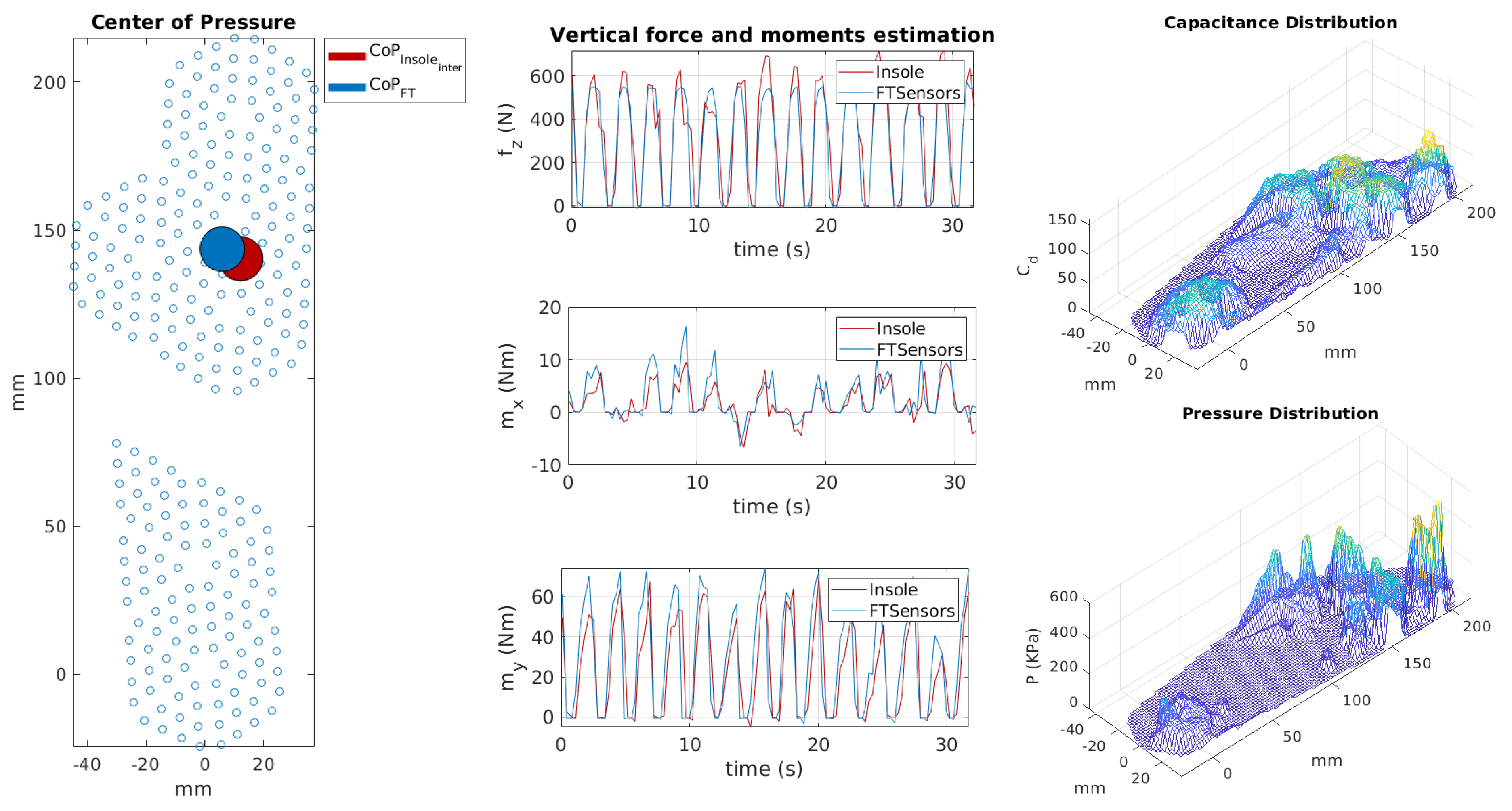
4.2. Validation
5. Conclusions
- A weighted iterative least-square method can be used in order to avoid manually tuning the weights;
- The formulation for describing the relationship between capacitance and pressure for each taxel could also take into account some hysteresis in the stiffness of the skin dielectric and the electric state of the sensor;
- Constraints on the model can be added in the optimisation problem;
- The accuracy and the repeatability of the data collection procedure can be improved.
Author Contributions
Funding
Conflicts of Interest
References
- Lucarotti, C.; Oddo, C.M.; Vitiello, N.; Carrozza, M.C. Synthetic and bio-artificial tactile sensing: A review. Sensors 2013, 13, 1435–1466. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gao, W.; Emaminejad, S.; Nyein, H.Y.Y.; Challa, S.; Chen, K.; Peck, A.; Fahad, H.M.; Ota, H.; Shiraki, H.; Kiriya, D.; et al. Fully integrated wearable sensor arrays for multiplexed in situ perspiration analysis. Nature 2016, 529, 509. [Google Scholar] [CrossRef] [Green Version]
- Mukhopadhyay, S.C. Wearable sensors for human activity monitoring: A review. IEEE Sens. J. 2014, 15, 1321–1330. [Google Scholar] [CrossRef]
- Hessert, M.J.; Vyas, M.; Leach, J.; Hu, K.; Lipsitz, L.A.; Novak, V. Foot pressure distribution during walking in young and old adults. BMC Geriatr. 2005, 5, 8. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sparrow, W.; Tirosh, O. Gait termination: a review of experimental methods and the effects of ageing and gait pathologies. Gait Posture 2005, 22, 362–371. [Google Scholar] [CrossRef] [PubMed]
- Queen, R.M.; Haynes, B.B.; Hardaker, W.M.; Garrett, W.E., Jr. Forefoot loading during 3 athletic tasks. Am. J. Sport. Med. 2007, 35, 630–636. [Google Scholar] [CrossRef] [PubMed]
- Razak, A.; Hadi, A.; Zayegh, A.; Begg, R.K.; Wahab, Y. Foot plantar pressure measurement system: A review. Sensors 2012, 12, 9884–9912. [Google Scholar] [CrossRef] [Green Version]
- Orlin, M.N.; McPoil, T.G. Plantar pressure assessment. Phy. Ther. 2000, 80, 399–409. [Google Scholar] [CrossRef] [Green Version]
- Adkin, A.L.; Frank, J.S.; Carpenter, M.G.; Peysar, G.W. Postural control is scaled to level of postural threat. Gait Posture 2000, 12, 87–93. [Google Scholar] [CrossRef]
- Cross, R. Standing, walking, running, and jumping on a force plate. Am. J. Phy. 1999, 67, 304–309. [Google Scholar] [CrossRef] [Green Version]
- Linthorne, N.P. Analysis of standing vertical jumps using a force platform. Am. J. Phy. 2001, 69, 1198–1204. [Google Scholar] [CrossRef] [Green Version]
- Kram, R.; Griffin, T.M.; Donelan, J.M.; Chang, Y.H. Force treadmill for measuring vertical and horizontal ground reaction forces. J. Appl. Physiol. 1998, 85, 764–769. [Google Scholar] [CrossRef] [PubMed]
- Bamberg, S.J.M.; Benbasat, A.Y.; Scarborough, D.M.; Krebs, D.E.; Paradiso, J.A. Gait analysis using a shoe-integrated wireless sensor system. IEEE Trans. Inf. Technol. Biomed. 2008, 12, 413–423. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, M.; Huang, B.; Xu, Y. Intelligent shoes for abnormal gait detection. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 2019–2024. [Google Scholar]
- Schepers, H.M.; Koopman, H.F.; Veltink, P.H. Ambulatory assessment of ankle and foot dynamics. IEEE Trans. Biomed. Eng. 2007, 54, 895–902. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schepers, H.M.; Van Asseldonk, E.H.; Baten, C.T.; Veltink, P.H. Ambulatory estimation of foot placement during walking using inertial sensors. J. Biomech. 2010, 43, 3138–3143. [Google Scholar] [CrossRef] [PubMed]
- Zhu, H.; Maalej, N.; Webster, J.G.; Tompkins, W.J.; Bach-y Rita, P.; Wertsch, J.J. An umbilical data-acquisition system for measuring pressures between the foot and shoe. IEEE Trans. Biomed. Eng. 1990, 37, 908–911. [Google Scholar] [CrossRef] [Green Version]
- Jagos, H.; Oberzaucher, J.; Reichel, M.; Zagler, W.L.; Hlauschek, W. A multimodal approach for insole motion measurement and analysis. Procedia Eng. 2010, 2, 3103–3108. [Google Scholar] [CrossRef] [Green Version]
- González, I.; Fontecha, J.; Hervás, R.; Bravo, J. An ambulatory system for gait monitoring based on wireless sensorized insoles. Sensors 2015, 15, 16589–16613. [Google Scholar] [CrossRef] [Green Version]
- Crea, S.; Donati, M.; De Rossi, S.; Oddo, C.; Vitiello, N. A wireless flexible sensorized insole for gait analysis. Sensors 2014, 14, 1073–1093. [Google Scholar] [CrossRef] [Green Version]
- Benocci, M.; Rocchi, L.; Farella, E.; Chiari, L.; Benini, L. A wireless system for gait and posture analysis based on pressure insoles and Inertial Measurement Units. In Proceedings of the 2009 3rd International Conference on Pervasive Computing Technologies for Healthcare, London, UK, 1–3 April 2009; pp. 1–6. [Google Scholar]
- Oerbekke, M.S.; Stukstette, M.J.; Schütte, K.; de Bie, R.A.; Pisters, M.F.; Vanwanseele, B. Concurrent validity and reliability of wireless instrumented insoles measuring postural balance and temporal gait parameters. Gait Posture 2017, 51, 116–124. [Google Scholar] [CrossRef]
- Natale, L.; Bartolozzi, C.; Pucci, D.; Wykowska, A.; Metta, G. icub: The not-yet-finished story of building a robot child. Sci. Rob. 2017, 2, eaaq1026. [Google Scholar] [CrossRef]
- Cannata, G.; Maggiali, M.; Metta, G.; Sandini, G. An embedded artificial skin for humanoid robots. In Proceedings of the 2008 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems, Seoul, Korea, 20–22 August 2008; pp. 434–438. [Google Scholar]
- Maiolino, P.; Maggiali, M.; Cannata, G.; Metta, G.; Natale, L. A Flexible and Robust Large Scale Capacitive Tactile System for Robots. IEEE Sens. J. 2013, 13, 3910–3917. [Google Scholar] [CrossRef]
- Stöggl, T.; Martiner, A. Validation of Moticon’s OpenGo sensor insoles during gait, jumps, balance and cross-country skiing specific imitation movements. J. Sport. Sci. 2017, 35, 196–206. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- XSENSOR. XSENSOR Technology Corporation. Available online: https://xsensor.com/applications/foot-gait-pressure-measurement/ (accessed on 23 December 2019).
- Kangro, J.; Traversaro, S.; Pucci, D.; Nori, F. Skin normal force calibration using vacuum bags. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 401–406. [Google Scholar]
- Kangro, J.; Sureshbabu, A.V.; Traversaro, S.; Pucci, D.; Nori, F. A Plenum-Based Calibration Device for Tactile Sensor Arrays. IEEE Rob. Autom. Lett. 2018, 3, 3937–3943. [Google Scholar] [CrossRef]
- Hayt, W.H.; Buck, J.J.A. Engineering Electromagnetics, 6th ed.; McGraw-Hill: New York, NY, USA, 1981; pp. 150–153. [Google Scholar]
- Beatty, M.F. Principles of Engineering Mechanics: Volume 2 Dynamics—The Analysis of Motion. In Mathematical concepts and methods in science and engineering; Springer Science & Business Media: Berlin, Germany, 2005. [Google Scholar]
- Andrade Chavez, F.; Kangro, J.; Traversaro, S.; Nori, F.; Pucci, D. Contact Force and Joint Torque Estimation Using Skin. IEEE Rob. Autom. Lett. 2017. [Google Scholar] [CrossRef] [Green Version]
- Neubauer, A. Tikhonov regularisation for non-linear ill-posed problems: optimal convergence rates and finite-dimensional approximation. Inverse Prob. 1989, 5, 541. [Google Scholar] [CrossRef]
- Ferreau, H.J.; Kirches, C.; Potschka, A.; Bock, H.G.; Diehl, M. qpOASES: A parametric active-set algorithm for quadratic programming. Math. Program. Comput. 2014, 6, 327–363. [Google Scholar] [CrossRef]
- FT Sensor. Available online: http://wiki.icub.org/wiki/FT_sensor#Creo_CAD_model (accessed on 15 January 2020).
- Sgolay. Available online: https://it.mathworks.com/help/signal/ref/sgolay.html (accessed on 15 January 2020).
- Yaramasu, V.; Wu, B. Model Predictive Control of Wind Energy Conversion Systems; Wiley: Hoboken, NJ, USA, 2016; chapter Appendix B. [Google Scholar]
- Metta, G.; Fitzpatrick, P.; Natale, L. YARP: yet another robot platform. Int. J. Adv. Rob. Syst. 2006, 3, 8. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Task | Description | Highest Pressure | RMSE | RMSE | RMSE |
|---|---|---|---|---|---|
| T1 | Still on feet | 220 | 7.5946 | 0.70729 | 2.2892 |
| T2 | Still on left foot | 560 | 11.9475 | 1.8784 | 4.5675 |
| T3 | Slow movements on feet | 490 | 34.1682 | 1.8559 | 5.2909 |
| T4 | Walk 1 | 630 | 93.4157 | 2.1891 | 12.129 |
| T5 | Walk 2 | 600 | 84.8782 | 1.9286 | 11.0665 |
| T6 | Walk 3 | 360 | 95.1694 | 0.99215 | 7.7857 |
| Task | Description | Accuracy (%) | Accuracy (%) | Accuracy (%) |
|---|---|---|---|---|
| T1 | Still on feet | 98.0472 | 70.8789 | 91.1336 |
| T2 | Still on left foot | 98.4868 | 73.6694 | 91.4024 |
| T3 | Slow movements on feet | 89.3013 | 71.6058 | 83.9142 |
| T4 | Walk 1 | 81.8419 | 64.056 | 75.9248 |
| T5 | Walk 2 | 83.8964 | 71.886 | 81.69 |
| T6 | Walk 3 | 82.5655 | 63.0632 | 70.7365 |
| Task | Description | RMSE | RMSE |
|---|---|---|---|
| (mm) | (mm) | ||
| T1 | Still on feet | 18.6429 | 4.951 |
| T2 | Still on left foot | 11.941 | 4.2918 |
| T3 | Slow movements on feet | 28.9685 | 6.697 |
| T4 | Walk 1 | 19.8642 | 3.8349 |
| T5 | Walk 2 | 18.6675 | 3.1547 |
| T6 | Walk 3 | 37.5296 | 5.084 |
| Task | Description | Accuracy [%] | Accuracy [%] |
|---|---|---|---|
| T1 | Still on feet | 69.5057 | 89.1761 |
| T2 | Still on left foot | 84.3097 | 60.71643 |
| T3 | Slow movements on feet | 99.9442 | 99.9884 |
| T4 | Walk 1 | 99.9805 | 99.9965 |
| T5 | Walk 2 | 99.9811 | 99.997 |
| T6 | Walk 3 | 99.9484 | 99.9935 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sorrentino, I.; Andrade Chavez, F.J.; Latella, C.; Fiorio, L.; Traversaro, S.; Rapetti, L.; Tirupachuri, Y.; Guedelha, N.; Maggiali, M.; Dussoni, S.; et al. A Novel Sensorised Insole for Sensing Feet Pressure Distributions. Sensors 2020, 20, 747. https://doi.org/10.3390/s20030747
Sorrentino I, Andrade Chavez FJ, Latella C, Fiorio L, Traversaro S, Rapetti L, Tirupachuri Y, Guedelha N, Maggiali M, Dussoni S, et al. A Novel Sensorised Insole for Sensing Feet Pressure Distributions. Sensors. 2020; 20(3):747. https://doi.org/10.3390/s20030747
Chicago/Turabian StyleSorrentino, Ines, Francisco Javier Andrade Chavez, Claudia Latella, Luca Fiorio, Silvio Traversaro, Lorenzo Rapetti, Yeshasvi Tirupachuri, Nuno Guedelha, Marco Maggiali, Simeone Dussoni, and et al. 2020. "A Novel Sensorised Insole for Sensing Feet Pressure Distributions" Sensors 20, no. 3: 747. https://doi.org/10.3390/s20030747
APA StyleSorrentino, I., Andrade Chavez, F. J., Latella, C., Fiorio, L., Traversaro, S., Rapetti, L., Tirupachuri, Y., Guedelha, N., Maggiali, M., Dussoni, S., Metta, G., & Pucci, D. (2020). A Novel Sensorised Insole for Sensing Feet Pressure Distributions. Sensors, 20(3), 747. https://doi.org/10.3390/s20030747