Path Following Based on Waypoints and Real-Time Obstacle Avoidance Control of an Autonomous Underwater Vehicle


Abstract
:1. Introduction
2. Analysis of the Control Problem
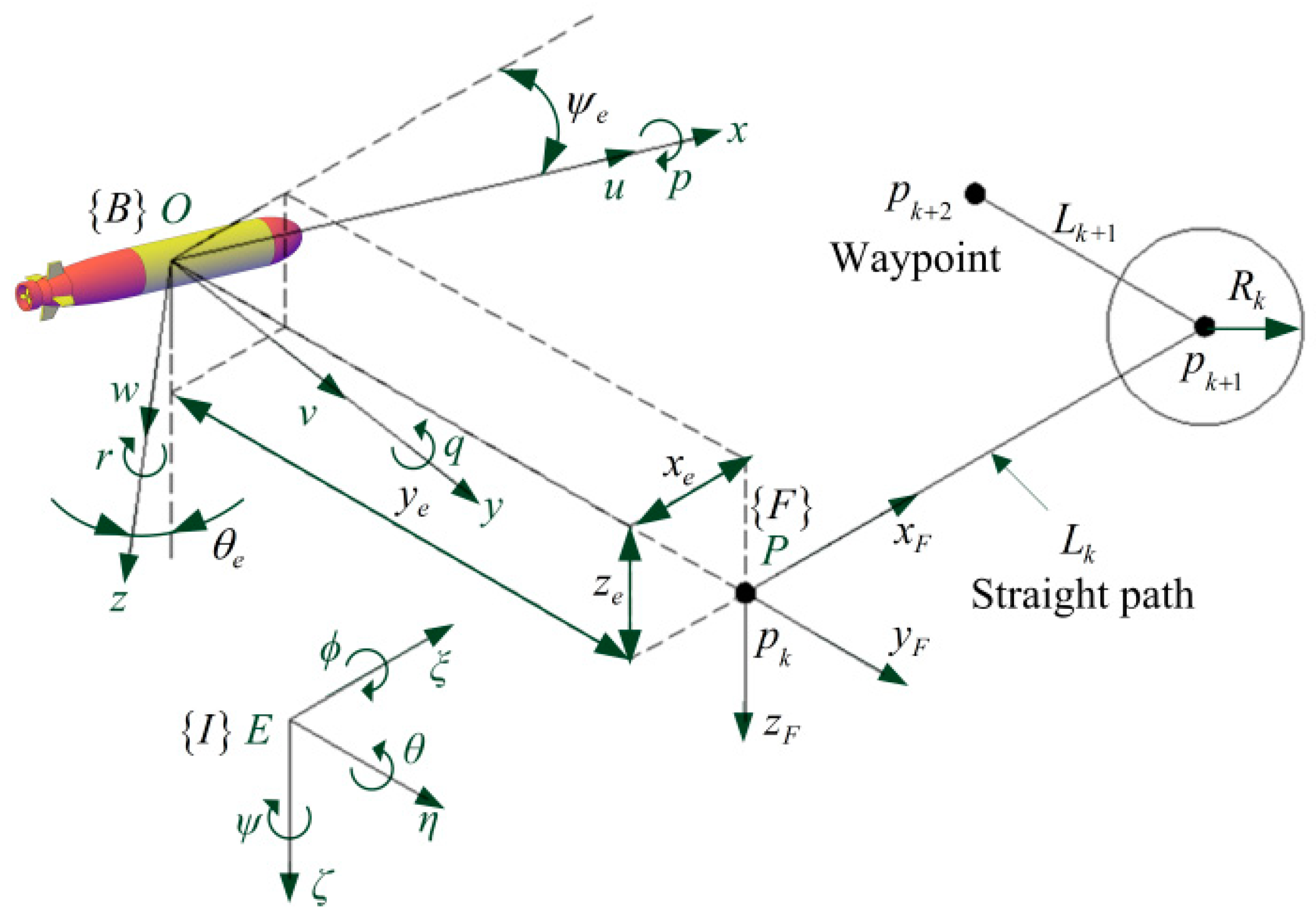
2.1. Kinematics and Dynamics Modeling
2.2. Error Model
3. Controller Design
3.1. Kinematics Controller
3.1.1. Kinematics Controller Design Based on LOS Guidance Law
3.1.2. Kinematics Controller Design Based on MPC
The Predictive Model
The Control Constraint
Optimization with Control Constraint
3.1.3. Obstacle Detection and Calculation of the Penalty Term for Obstacle Avoidance
- Step 1:
- The coordinates of intersection points in a fixed coordinate system are calculated according to the following equations:
- Step 2:
- The distance between the intersection point and the current path is calculated according to the following equation:
- Step 3:
- If all the data are greater than zero, then the obstacle is on the right side of the path. At this point, if is satisfied, then set . Otherwise, choose to avoid the obstacle from the left side of the obstacle and set until all the received data ρ values are zero, then set , where is the safe distance between the AUV and an obstacle.
- Step 4:
- If all the data are less than zero, then the obstacle is on the left side of the path. At this point, if is satisfied, then set . Otherwise, choose to avoid the obstacle from the right side of the obstacle and set until all the received data ρ values are zero, then set .
- Step 5:
- If is satisfied, then the obstacle is on the path ahead. At this point, if is satisfied, then choose to avoid the obstacle from the left side of the obstacle and set . Otherwise, choose to avoid the obstacle from the right side of the obstacle and set until all the received data ρ values are zero, then set .
3.2. Dynamics Controller
3.3. Stability Analysis of Sway and Heave
4. The Results and Analysis of the Simulation Experiment
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Fredriksen, E.; Pettersen, K.Y. Global κ-exponential way-point maneuvering of ships: Theory and experiments. Automatica 2006, 42, 677–687. [Google Scholar] [CrossRef]
- Fossen, T.I.; Breivik, M.; Skjetne, R. Line-of-sight path following of underactuated marine craft. In Proceedings of the 6th IFAC Conference on Manoeuvring and Control of Marine Craft (MCMC 2003), Girona, Spain, 17–19 September 2003; pp. 211–216. [Google Scholar]
- Lekkas, A.M.; Fossen, T.I. Minimization of cross-track and along-track errors for path tracking of marine underactuated vehicles. In Proceedings of the 2014European Control Conference (ECC), Strasbourg, France, 24–27 June 2014; pp. 3004–3010. [Google Scholar]
- Liu, F.; Shen, Y.; He, B.; Wan, J.; Wang, D.R.; Yin, Q.Q.; Qin, P. 3DOF adaptive line-of-sight based proportional guidance law for path following of the AUV in the presence of ocean currents. Appl. Sci. 2019, 9, 3518. [Google Scholar] [CrossRef] [Green Version]
- Lekkas, A.M.; Fossen, T.I. A time-varying lookahead distance guidance law for path following. IFAC Proc. Vol. 2012, 45, 398–403. [Google Scholar] [CrossRef] [Green Version]
- Mu, D.D.; Wang, G.F.; Fan, Y.S.; Sun, X.J.; Qiu, B.B. Adaptive LOS path following for a podded propulsion unmanned surface vehicle with uncertainty of model and actuator saturation. Appl. Sci. 2017, 7, 1232. [Google Scholar] [CrossRef] [Green Version]
- Caharija, W.; Pettersen, K.Y.; Calado, P.; Braga, J. A comparison between the ILOS guidance and the vector field guidance. IFAC-Pap. OnLine 2015, 48, 89–94. [Google Scholar] [CrossRef]
- Xu, H.; Soares, C.G. Vector field path following for surface marine vessel and parameter identification based on LS-SVM. Ocean Eng. 2016, 113, 151–161. [Google Scholar] [CrossRef]
- Moe, S.; Caharija, W.; Pettersen, K.Y.; Schjolberg, I. Path following of underactuated marine surface vessels in the presence of unknown ocean currents. In Proceedings of the 2014 American Control Conference (ACC), Portland, OR, USA, 4–6 June 2014; pp. 3856–3861. [Google Scholar]
- Caharija, W.; Pettersen, K.Y.; Gravdahl, J.T.; Borhaug, E. Path following of underactuated autonomous underwater vehicles in the presence of ocean currents. In Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 528–535. [Google Scholar]
- Caharija, W.; Pettersen, K.Y.; Sørensen, A.J.; Candeloro, M.; Gravdahl, J.T. Relative velocity control and integral line of sight for path following of autonomous surface vessels: Merging intuition with theory. Proc. Inst. Mech. Eng. Part M: J. Eng. Marit. Environ. 2014, 228, 180–191. [Google Scholar] [CrossRef]
- Fossen, T.I.; Pettersen, K.Y.; Galeazzi, R. Line-of-sight path following for dubins paths with adaptive sideslip compensation of drift forces. IEEE Trans. Control Syst. Technol. 2015, 23, 820–827. [Google Scholar] [CrossRef] [Green Version]
- Calvo, O.; Rozenfeld, A.; Souza, A.; Valenciaga, F.; Puleston, P.F.; Acosta, G. Experimental results on smooth path tracking with application to pipe surveying on inexpensive AUV. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 3647–3653. [Google Scholar]
- Pettersen, K.Y.; Nijmeijer, H. Underactuated ship tracking control: theory and experiments. Int. J. Control 2001, 74, 1435–1446. [Google Scholar] [CrossRef]
- Repoulias, F.; Papadopoulos, E. Planar trajectory planning and tracking control design for underactuated AUVs. Ocean Eng. 2006, 34, 1650–1667. [Google Scholar] [CrossRef]
- Jiang, Z.P. Global tracking control of underactuated ships by Lyapunov’s direct method. Automatica 2002, 38, 301–309. [Google Scholar] [CrossRef]
- Do, K.D.; Pan, J. State-and output-feedback robust path-following controllers for underactuated ships using Serret–Frenet frame. Ocean Eng. 2004, 31, 587–613. [Google Scholar] [CrossRef]
- Do, K.D.; Pan, J. Global robust adaptive path following of underactuated ships. Automatica 2006, 42, 1713–1722. [Google Scholar] [CrossRef]
- Lapierre, L.; Jouvencel, B. Robust nonlinear path-following control of an AUV. IEEE J. Ocean. Eng. 2008, 33, 89–102. [Google Scholar] [CrossRef]
- Wang, S.S.; Wang, L.J.; Qiao, Z.X.; Li, F.S. Optimal robust control of path following and rudder roll reduction for a container ship in heavy waves. Appl. Sci. 2018, 8, 1631. [Google Scholar] [CrossRef] [Green Version]
- Fossen, T.I.; Lekkas, A.M. Direct and indirect adaptive integral line-of-sight path-following controllers for marine craft exposed to ocean currents. Int. J. Adapt. Control Signal Process. 2017, 31, 445–463. [Google Scholar] [CrossRef]
- Antonelli, G.; Caccavale, F.; Chiaverini, S.; Fusco, G. A novel adaptive control law for underwater vehicles. IEEE Trans. Control Syst. Technol. 2003, 11, 221–232. [Google Scholar] [CrossRef]
- Li, J.H.; Lee, P.M. Design of an adaptive nonlinear controller for depth control of an autonomous underwater vehicle. Ocean Eng. 2005, 32, 2165–2181. [Google Scholar] [CrossRef]
- Silvestre, C.; Pascoal, A.; Kaminer, I. On the design of gain-scheduled trajectory tracking controllers. Int. J. Robust Nonlinear Control 2002, 12, 797–839. [Google Scholar] [CrossRef] [Green Version]
- Liao, Y.L.; Wan, L.; Zhang, J.Y. Backstepping dynamical sliding mode control method for the path following of the underactuated surface vessel. Procedia Eng. 2011, 15, 256–263. [Google Scholar] [CrossRef] [Green Version]
- Ji, D.; Liu, J.; Zhao, H.; Wang, Y. Path Following of Autonomous Vehicle in 2D Space Using Multivariable Sliding Mode Control. J. Robot. 2014, 2014, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.; Wang, M.; Qiao, L. Dynamical sliding mode control for the trajectory tracking of underactuated unmanned underwater vehicles. Ocean Eng. 2015, 105, 54–63. [Google Scholar] [CrossRef]
- Liu, C.; Zou, Z.; Yin, J. Trajectory tracking of underactuated surface vessels based on neural network and hierarchical sliding mode. J. Mar. Sci. Technol. 2015, 20, 322–330. [Google Scholar] [CrossRef]
- Chen, W.; Wei, Y.H.; Zeng, J.H.; Han, H.; Jia, X. Adaptive Terminal Sliding Mode NDO-Based Control of Underactuated AUV in Vertical Plane. Discret. Dyn. Nat. Soc. 2016, 2016, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Zhou, J.J.; Tang, Z.D.; Zhang, H.H.; Jiao, J.F. Spatial Path Following for AUVs Using Adaptive Neural Network Controllers. Math. Probl. Eng. 2013, 2013, 1–9. [Google Scholar] [CrossRef]
- Khaled, N.; Chalhoub, N.G. A self-tuning guidance and control system for marine surface vessels. Nonlinear Dyn. 2013, 73, 897–906. [Google Scholar] [CrossRef]
- Oh, S.R.; Sun, J. Path following of underactuated marine surface vessels using line-of-sight based model predictive control. Ocean Eng. 2010, 37, 289–295. [Google Scholar] [CrossRef]
- Yao, X.L.; Yang, G.Y.; Peng, Y. Nonlinear Reduced-Order Observer-Based Predictive Control for Diving of an Autonomous Underwater Vehicle. Discret. Dyn. Nat. Soc. 2017, 2017, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Z.W.; Feroskhan, M. Path following of a surface vessel with prescribed performance in the presence of input saturation and external disturbances. IEEE/ASME Trans. Mechatron. 2017, 22, 2564–2575. [Google Scholar] [CrossRef]
- Moe, S.; Pettersen, K.Y. Set-Based Line-of-Sight (LOS) Path Following with Collision Avoidance for Underactuated Unmanned Surface Vessel. In Proceedings of the 2016 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016; pp. 402–409. [Google Scholar] [CrossRef] [Green Version]
- Shim, T.; Adireddy, G.; Yuan, H.L. Autonomous vehicle collision avoidance system using path planning and model-predictive-control-based active front steering and wheel torque control. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2012, 226, 767–778. [Google Scholar] [CrossRef]
- Filaretov, V.; Yukhimets, D. The method of formation of the AUV smooth trajectory in unknown environment. In Proceedings of the OCEANS’2016, Shanghai, China, 10–13 April 2016; pp. 1–8. [Google Scholar]
- Castaño, F.; Beruvides, G.; Villalonga, A.; Haber, R.E. Self-Tuning Method for Increased Obstacle Detection Reliability Based on Internet of Things LiDAR Sensor Models. Sensors 2018, 18, 1508. [Google Scholar] [CrossRef] [Green Version]
- Castaño, F.; Strzelczak, S.; Villalonga, A.; Haber, R.E.; Kossakowska, J. Sensor reliability in cyber-physical systems using internet-of-things data: A review and case study. Remote Sens. 2019, 11, 2252. [Google Scholar] [CrossRef] [Green Version]
- Yan, Z.P.; Li, J.Y.; Zhang, G.S.; Wu, Y. A Real-Time Reaction Obstacle Avoidance Algorithm for Autonomous Underwater Vehicles in Unknown Environments. Sensors 2018, 18, 438. [Google Scholar] [CrossRef] [Green Version]
- Li, J.H.; Lee, P.M.; Jun, B.H.; Lim, Y.K. Point-to-point navigation of underactuated ships. Automatica 2008, 44, 3201–3205. [Google Scholar] [CrossRef]
- Prestero, T. Development of a Six-Degree of Freedom Simulation Model for the REMUS Autonomous Underwater Vehicle. In Proceedings of the MTS/IEEE Oceans 2001. An Ocean Odyssey. Conference Proceedings, Honolulu, HI, USA, 5–8 November 2001; pp. 450–455. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Waypoints | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| 10 | 10 | −50 | −50 | 10 | 40 | 100 | 130 | 130 | 100 | |
| 0 | 30 | 30 | −30 | −30 | −30 | 30 | 30 | −30 | −30 | |
| 0 | 4 | 12 | 20 | 28 | 28 | 28 | 28 | 28 | 28 |
| MPC | MPC | LOS+PID | LOS+PID | SMC | SMC |
|---|---|---|---|---|---|
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, X.; Wang, X.; Wang, F.; Zhang, L. Path Following Based on Waypoints and Real-Time Obstacle Avoidance Control of an Autonomous Underwater Vehicle. Sensors 2020, 20, 795. https://doi.org/10.3390/s20030795
Yao X, Wang X, Wang F, Zhang L. Path Following Based on Waypoints and Real-Time Obstacle Avoidance Control of an Autonomous Underwater Vehicle. Sensors. 2020; 20(3):795. https://doi.org/10.3390/s20030795
Chicago/Turabian StyleYao, Xuliang, Xiaowei Wang, Feng Wang, and Le Zhang. 2020. "Path Following Based on Waypoints and Real-Time Obstacle Avoidance Control of an Autonomous Underwater Vehicle" Sensors 20, no. 3: 795. https://doi.org/10.3390/s20030795