Advanced UAV–WSN System for Intelligent Monitoring in Precision Agriculture †





Abstract
:1. Introduction
- Waypoint passing: a UAV has to pass above the CH to extract the relevant data from that area (covered by the corresponding WSN sub-network);
- Obstacle avoidance: UAVs avoid obstructions or prohibited areas along the flight plan;
- Guaranteed communication: to ensure that the data has been fully collected, enough time has to be spent in the CH neighborhood;
- Efficiency: reduce at a minimum the energy consumption for that trajectory (consider the length of the trajectory and its complexity).
- -
- Group the sensors in clusters and determine the cluster heads, the methodology proposed by the authors in Reference [30];
- -
- Path planning based on specific conditions for efficient data collection; and
- -
- Intelligent data collection and processing.
2. Materials and Methods
2.1. Requirements for Integrated UAV-WSN-IoT Systems
2.2. UAV Trajectory Design
- RTB = return to base, a flag denoting whether the UAV has to return to its path’s starting point;
- LM = loiter mode, denotes that the UAV has entered the loiter mode; at the start of this mode, the LMT = loiter mode remaining time is initialized to a predefined value which is decreased (at each step with a constant value T) as long as the UAV remains in the loiter mode;
- PP = projection point, obtained by projecting the current position onto the support line of the current segment from which W = weight of the PP (denoting whether the PP is inside the segment, to the left or to the right) and D = distance between the UAV position and the PP, are computed;
- PCP = proximity circle point represents the intersection between the proximity circle and the current segment (in case of intersection between the circle and the segment there are two solutions; the one closest to the end-point of the segment is taken);
- LP = loiter point is computed such that the UAV tracks the loiter circle (with the sense of movement decided a priori by the supervisor); and
- CP = current waypoint, throughout the algorithm, is updated as needed.
- ►
- The UAV has two modes of functioning, loiter mode and segment tracking mode, which are decided by the supervisor (in the sense that within the collection of waypoints a priori computed, some of them are labeled as loiter points).
- ►
- In both cases, the algorithm provides a heading which is the reference to be tracked by the UAV. This is in line with standard practices, where the heading is decided through some design procedure and the velocity and pitch and roll angles are decided at the auto-pilot level (usually the velocity is maintained constant and the roll and pitch are taken as needed between admissible bounds).
- ►
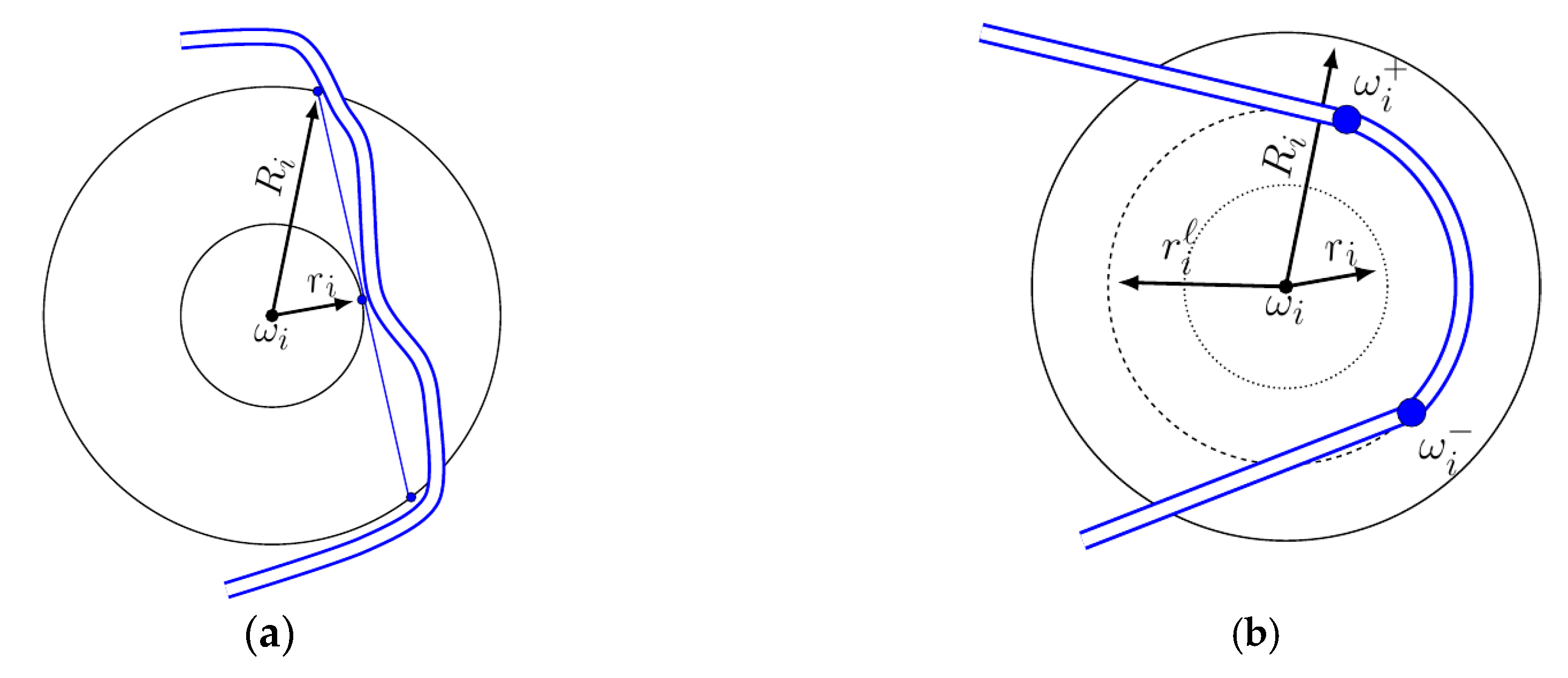
- The decisions taken by the algorithm and supervisor are, ultimately, related to the distance between the current position and some point of interest. To do so, we consider some circles of interest, defined as follows:
- ○
- Communication circle: the UAV communicates with the ground-based cluster head only when it is within the communication radius.
- ○
- Waypoint update circle: it is impractical to assume that the UAV passes through the exact coordinates of the current waypoint. Thus, we update the active segment (by advancing through the list of waypoints) whenever we are close enough to the end-point of the current segment.
- ○
- Loitering circle: whenever the UAV is required to spend a significant time in communication with the current cluster head, the decision to start loitering is taken. The loitering radius is restricted to be less than the communication radius and larger than the physical limitations imposed by the roll angle bounds (a tighter circle means a larger roll angle).
- ○
- Proximity circle: the procedure employed in the algorithm takes (whenever there is intersection between the circle and the current segment) the heading angle in the direction of the intersection point (the one closest to the end-point of the segment).
- ►
- When the last waypoint is covered, the UAV returns to base (by default, we consider this to be the initial point on the trajectory).
- At the current time, we consider the UAV position (x,y), the segment determined by the current (CP) and next waypoint (CP + 1):
- We compute the projection of the current point onto the current segment (PP). We identify three possible cases by checking the relative position of the projection wrt the segment’s end points (described by W): inside the segment (0 ≤ W ≤ 1)), outside and located before the initial segment end (W < 0); outside and located after the initial segment end (W > 1);
- We compute the distance (D) from the current point to the segment and the circle of radius L (proportional with the UAV velocity) and further used to compute the heading vector.
- We consider the following cases:
- The UAV is too far away, and the projection point lies before the segment start point. Then, the heading angle points towards the projection point.
- The UAV is sufficiently close, and the projection point lies before the segment start point. Then, the heading angle points towards the start point.
- The UAV is sufficiently close to the segment end point, or its projection onto the segment lies after the end point. Then, the current segment is updated, and the procedure jumps to step 4i.
- The UAV is too far away, and its projection lies onto the interior of the segment. Then, the heading vector points towards the projection.
- The UAV is sufficiently close, and its projection lies onto the interior of the segment. The heading angle is taken as the vector of length L in which the tip lies on the segment (there are two possible tips; the one closer to the segment end point is considered).
- Go to step 1.
- Select the loitering center as the current waypoint.
- Construct the circle of radius L and centered in the current position of the UAV.
- If the circle does not intersect the loitering circle, move towards the projection point situated on the loitering circle.
- If the proximity circle intersects the loitering circle, take the heading vector along the tangent at the intersection point between loitering circle and proximity circle (there are two solutions, we selected depending on the desired loitering rotation—clockwise or counterclockwise).
2.3. Relevant Data Extraction
- is the computed estimate of node ;
- is the weight applied to its own previous computed estimate;
- is the weight associated with the node for the value of node ;
- is a convergence step; and
- is the neighborhood of node ,
- is the distance to the closest neighbor; and
- denotes the distance between node and j.
- -
- is the weight applied to the state value, computed for each step of the average consensus;
- -
- is the weight applied to the neighborhood estimate.
3. Experimental Results
3.1. Path Tracking
3.2. Sensor Placement and Parameter Maps
3.3. Data Processing Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wolfert, S.; Ge, L.; Verdouw, C.; Bogaardt, M.-J. Big Data in smart farming—A review. Agric. Syst. 2017, 153, 69–80. [Google Scholar] [CrossRef]
- Piotrowski, K.; Sojka-Piotrowska, A.; Stamenkovic, Z.; Kraemer, R. IHPNode platform as a base for precision farming and remote diagnosis in agriculture. In Proceedings of the 24th Telecommunications forum TELFOR, Serbia, Belgrade, 22–23 November 2016; pp. 1–5. [Google Scholar]
- Valente, J.; Sanz, D.; Barrientos, A.; Cerro, J.D.; Ribeiro, A.; Rossi, C. An air-ground wireless sensor network for crop monitoring. Sensors 2011, 11, 6088–6108. [Google Scholar] [CrossRef] [Green Version]
- Di Gennaro, S.F.; Matesea, A.; Gioli, B.; Toscano, P.; Zaldei, A.; Palliotti, A.; Genesio, L. Multisensor approach to assess vineyard thermal dynamics combining high resolution Unmanned Aerial Vehicle (UAV) remote sensing and wireless sensor network (WSN) proximal sensing. Sci. Hortic. 2017, 221, 83–87. [Google Scholar] [CrossRef]
- Polo, J.; Hornero, G.; Duijneveld, C.; García, A.; Casas, O. Design of a low-cost Wireless Sensor Network with UAV mobile node for agricultural applications. Comput. Electron. Agric. 2015, 119, 19–32. [Google Scholar] [CrossRef]
- Primicerio, J.; Matese, A.; Gennaro, S.D.; Albanese, L.; Guidoni, S.; Gay, P. Development of an integrated, low-cost and opensource system for precision viticulture: From UAV to WSN. In Proceedings of the EFITA-WCCA-CIGR Conference Sustainable Agriculture through ICT Innovation, Torino, Italy, 23–27 June 2013; pp. 1–6. [Google Scholar]
- Drones—Regulatory Framework Background/EASA. Available online: http://www.easa.europa.eu (accessed on 1 December 2019).
- FAA Reauthorization Act of 2018/Subtitle B—Unmanned Aircraft Systems. Available online: https://www.faa.gov (accessed on 1 December 2019).
- Barbedo, J.G.A. A review on the use of Unmanned Aerial Vehicles and imaging sensors for monitoring and assessing plant stresses. Drones 2019, 3, 40. [Google Scholar] [CrossRef] [Green Version]
- Shafi, U.; Mumtaz, R.; García-Nieto, J.; Hassan, S.A.; Zaidi, S.A.R.; Iqbal, N. Precision agriculture techniques and practices: From considerations to applications. Sensors 2019, 19, 3796. [Google Scholar] [CrossRef] [Green Version]
- Popescu, D.; Ichim, L.; Stoican, F. Unmanned Aerial Vehicle Systems for remote estimation of flooded areas based on complex image processing. Sensors 2017, 17, 446. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Xiao, L.; Yang, D.; Cuthbert, L.; Wang, Y. Energy-efficient UAV communication with multiple GTs based on trajectory optimization. Mob. Inf. Syst. 2018, 2018, 5629573. [Google Scholar] [CrossRef]
- Sylvester, G. E-Agriculture in Action: Drones for Agriculture; Food and Agriculture Organization of the United Nations and International Telecommunication Union: Bangkok, Thailand, 2018; Available online: http://www.fao.org/documents/card/en/c/I8494EN/ (accessed on 1 December 2019).
- Matese, A.; Di Gennaro, S.F. Practical applications of a multisensor UAV platform based on multispectral, thermal and RGB high resolution images in precision viticulture. Agriculture 2018, 8, 116. [Google Scholar] [CrossRef] [Green Version]
- Ballesteros, R.; Ortega, J.F.; Hernandez, D.; Moreno, M.A. Onion biomass monitoring using UAV-based RGB imaging. Precis. Agric. 2018, 19, 840–857. [Google Scholar] [CrossRef]
- Karydas, C.; Gewehr, S.; Iatrou, M.; Iatrou, G.; Mourelatos, S. Olive plantation mapping on a sub-tree scale with object-based image analysis of multispectral UAV data; Operational potential in tree stress monitoring. J. Imaging 2017, 3, 57. [Google Scholar] [CrossRef] [Green Version]
- Johansen, K.; Raharjo, T.; McCabe, M.F. Using multi-spectral UAV imagery to extract tree crop structural properties and assess pruning effects. Remote Sens. 2018, 10, 854. [Google Scholar] [CrossRef] [Green Version]
- Gómez-Candón, D.; Torres-Sanchez, J.; Labbé, S.; Jolivot, A.; Martinez, S.; Regnard, J. Water stress assessment at tree scale: High-resolution thermal UAV imagery acquisition and processing. Acta Hortic. 2017, 1150, 159–166. [Google Scholar] [CrossRef] [Green Version]
- Ribeiro-Gomes, K.; Hernandez-Lopez, D.; Ortega, J.F.; Ballesteros, R.; Poblete, T.; Moreno, M.A. Uncooled thermal camera calibration and optimization of the photogrammetry process for UAV applications in agriculture. Sensors 2017, 17, 2173. [Google Scholar] [CrossRef] [PubMed]
- Tetila, E.C.; Machado, B.B.; Belete, N.A.S.; Guimarães, D.A.; Pistori, H. Identification of Soybean foliar diseases using Unmanned Aerial Vehicle images. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2190–2194. [Google Scholar] [CrossRef]
- Stamenković, Z.; Randjić, S.; Santamaria, I.; Pešović, U.; Panić, G.; Tanasković, S. Advanced Wireless Sensor Nodes and networks for agricultural applications. In Proceedings of the 24th Telecommunications Forum (TELFOR), Belgrade, Serbia, 22–23 November 2016; pp. 1–8. [Google Scholar]
- Popescu, D.; Stoican, F.; Stamatescu, G.; Chenaru, O.; Ichim, L. A survey of collaborative UAV-WSN systems for efficient monitoring. Sensors 2019, 19, 4690. [Google Scholar] [CrossRef] [Green Version]
- Moreno-Moreno, C.D.; Brox-Jiménez, M.; Gersnoviez-Milla, A.A.; Márquez-Moyano, M.; Ortiz-López, M.A.; Quiles-Latorre, F.J. Wireless Sensor Network for sustainable agriculture. Proceedings 2018, 2, 1302. [Google Scholar] [CrossRef] [Green Version]
- Husemann, C.; Novković, N. Farm management information systems: A case study on a german multifunctional farm. Econ. Agric. 2014, 2, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Köksal, Ö.; Tekinerdogan, B. Architecture design approach for IoT-based farm management information systems. Precis. Agric. 2019, 20, 926–958. [Google Scholar] [CrossRef] [Green Version]
- Kumar, A.; Ilango, P. The impact of Wireless Sensor Network in the field of precision agriculture: A review. Wirel. Pers. Commun. 2017, 98, 685–698. [Google Scholar] [CrossRef]
- Keshtgary, M.; Deljoo, A. An efficient wireless sensor network for precision agriculture. Can. J. Multimed. Wirel. Netw. 2012, 3, 1–6. [Google Scholar]
- Nikolidakis, S.A.; Kandris, D.; Vergados, D.D.; Douligeris, C. Energy efficient automated control of irrigation in agriculture by using wireless sensor networks. Comput. Electron. Agric. 2015, 113, 154–163. [Google Scholar] [CrossRef]
- Yousif, M.E.R.; Ghafar, K.; Zahari, R.; Lim, T.H. A rule-based smart automated fertilization and irrigation systems. In Proceedings of the Ninth International Conference on Graphic and Image Processing (ICGIP 2017), Qingdao, China, 14–16 October 2017. [Google Scholar]
- Popescu, D.; Dragana, C.; Stoican, F.; Ichim, L.; Stamatescu, G. A collaborative UAV–WSN network for monitoring large areas. Sensors 2018, 18, 4202. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vasisht, D.; Kapetanovic, Z.; Won, J.; Jin, X.; Chandra, R.; Kapoor, A.; Sinha, S.N.; Sudarshan, M.; Stratman, S. Farmbeats: An IoT platform for data-driven agriculture. In Proceedings of the 14th USENIX Conference on Networked Systems Design and Implementation (NSDI), Boston, MA, USA, 27–29 March 2017; pp. 515–528. [Google Scholar]
- Lysenko, V.; Opryshko, O.; Komarchuk, D.; Pasichnyk, N.; Zaets, N.; Dudnyk, A. Information support of the remote nitrogen monitoring system in agricultural crops. Int. J. Comput. 2018, 17, 47–54. [Google Scholar]
- Stamatescu, G.; Stamatescu, I.; Drăgana, C.; Popescu, D. Large scale heterogeneous monitoring system with decentralized sensor fusion. In Proceedings of the IEEE 8th International Conf. on Intelligent Data Acquisition and Advanced Computing Systems (IDAACS), Warsaw, Poland, 24–26 September 2015; pp. 2–5. [Google Scholar]
- Dragana, C.; Stamatescu, G.; Mihai, V.; Popescu, D. Evaluation of cluster formation algorithm in large scale wireless sensor network. In Proceedings of the 9th IEEE Intl Conf on Intelligent Data Acquisition and Advanced Computing Systems (IDAACS), Bucharest, Romania, 21–23 September 2017; pp. 859–863. [Google Scholar]
- Anawar, M.R.; Wang, S.; Azam Zia, M.; Jadoon, A.K.; Akram, U.; Raza, S. Fog computing: An overview of big IoT data analytics. Wirel. Commun. Mob. Comput. 2018, 2018, 1–22. [Google Scholar] [CrossRef]
- Yang, Q.; Yoo, S. Optimal UAV path planning: Sensing data acquisition over IoT sensor networks using multi-objective bio-inspired algorithms. IEEE Access 2018, 6, 13671–13684. [Google Scholar] [CrossRef]
- Goudarzi, S.; Kama, N.; Anisi, M.H.; Zeadally, S.; Mumtaz, S. Data collection using Unmanned Aerial Vehicles for Internet of Things platforms. Comput. Electr. Eng. 2019, 75, 1–15. [Google Scholar] [CrossRef]
- Zhan, C.; Zeng, Y.; Zhang, R. Energy-efficient data collection in UAV enabled Wireless Sensor Network. IEEE Wirel. Commun. Lett. 2018, 7, 328–331. [Google Scholar] [CrossRef] [Green Version]
- Stoican, F.; Prodan, I.; Popescu, D. Flat trajectory generation for way-points relaxations and obstacle avoidance. In Proceedings of the 23rd Mediterranean Conference on Control and Automation (MED), Torremolinos, Spain, 16–19 June 2015; pp. 695–700. [Google Scholar]
- Sager, S. Numerical Methods for Mixed-Integer Optimal Control Problems. Ph.D. Thesis, Universitat Heidelberg, Der andere Verlag Tonning, Germany, 2005. [Google Scholar]
- Liu, B.; Zhu, H. Energy-effective data gathering for UAV-aided Wireless Sensor Networks. Sensors 2019, 19, 2506. [Google Scholar] [CrossRef] [Green Version]
- Santamaria, A.F.; Raimondo, P.; Tropea, M.; De Rango, F.; Aiello, C. An IoT surveillance system based on a decentralised architecture. Sensors 2019, 19, 1469. [Google Scholar] [CrossRef] [Green Version]
- Alighanbari, M.; Kuwata, Y.; How, J. Coordination and control of multiple UAVs with timing constraints and loitering. In Proceedings of the American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 5311–5316. [Google Scholar]
- Blanchini, F.; Miani, S. Set-Theoretic Methods in Control; Springer: Cham, Switzerland, 2008; ISBN 978-0-8176-3255-7. [Google Scholar]
- Lin, J.; Keogh, E.; Wei, L.; Lonardi, S. Experiencing SAX: A novel symbolic representation of time series. Data Min. Knowl. Discov. 2007, 15, 107–144. [Google Scholar] [CrossRef] [Green Version]
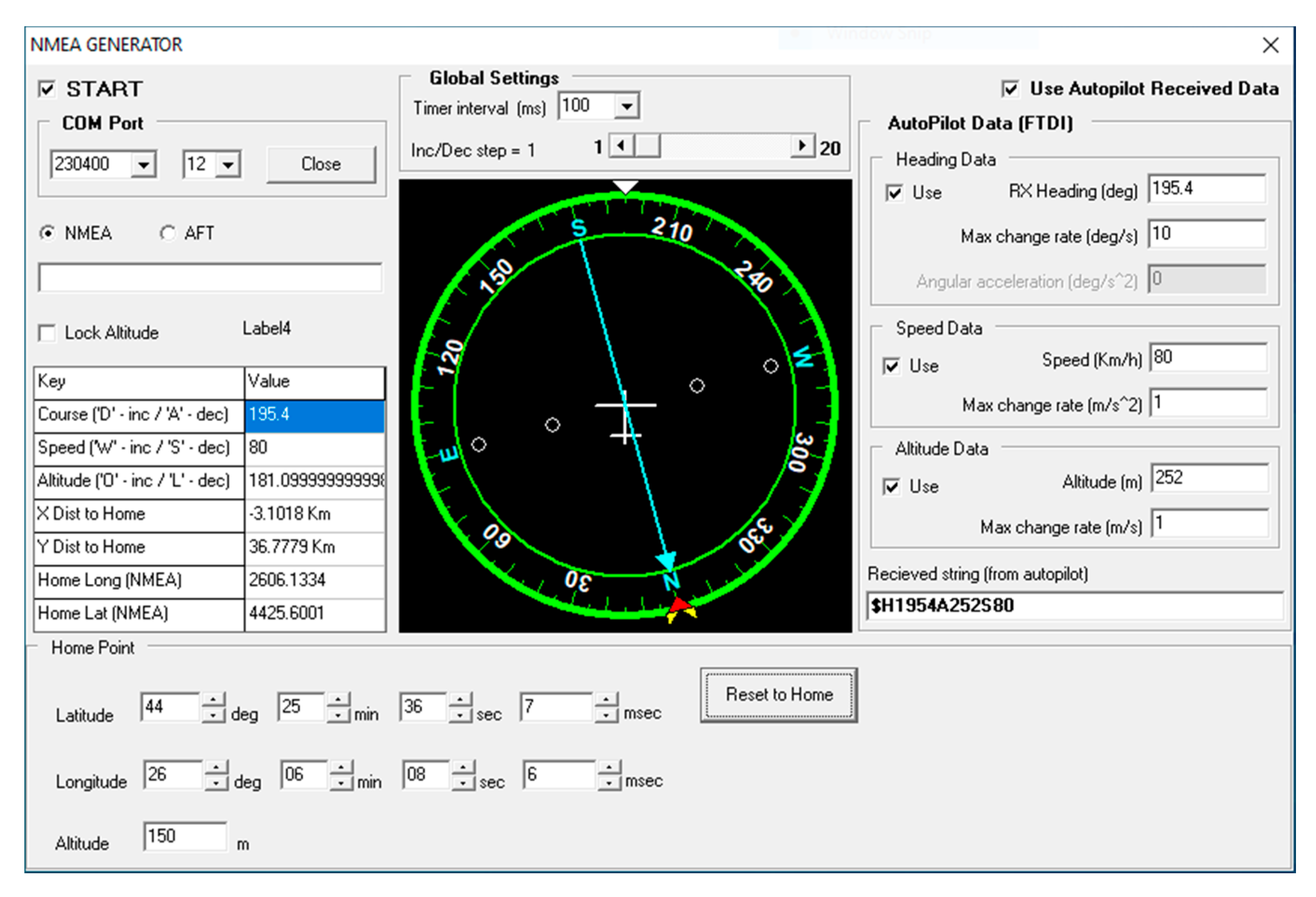
- NMEA Generator. Available online: https://nmeagen.org (accessed on 1 September 2019).
- Popescu, D.; Stoican, F.; Ichim, L.; Stamatescu, G.; Dragana, C. Collaborative UAV-WSN system for data acquisition and processing in agriculture. In Proceedings of the 10th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS), Metz, France, 18–21 September 2019; pp. 519–524. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Content |
|---|---|
| Field | Sensors (SNs) |
| Edge computing | Cluster heads (CHs), UAV |
| Cloud computing | Cloud |
| Data interpretation | User server |
| SAX Parameters | Solar Radiation | Air Temperature | Soil Temperature | Relative Humidity |
|---|---|---|---|---|
| nseg = 10 alphabet size = 4 | bcccbccccb | bbcccbcccb | aabdccccdc | cccbbbbbbc |
| nseg = 10 alphabet size = 6 | cdddcddddc | bcdddcdddc | aaceeddded | eddcccccce |
| nseg = 20 alphabet size = 4 | bbbcbcbcbcbcbdbdbdab | abacbdbdadadadadbdac | aaaaaccdcccccccccdcb | dcdbdacadacadadacadc |
| nseg = 20 alphabet size = 6 | bccdcecdbecebebebebc | bcbebfcfbebeafbfbead | aaabbdeeeededdddeeec | edebebebeaeaeaeaebed |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Popescu, D.; Stoican, F.; Stamatescu, G.; Ichim, L.; Dragana, C. Advanced UAV–WSN System for Intelligent Monitoring in Precision Agriculture. Sensors 2020, 20, 817. https://doi.org/10.3390/s20030817
Popescu D, Stoican F, Stamatescu G, Ichim L, Dragana C. Advanced UAV–WSN System for Intelligent Monitoring in Precision Agriculture. Sensors. 2020; 20(3):817. https://doi.org/10.3390/s20030817
Chicago/Turabian StylePopescu, Dan, Florin Stoican, Grigore Stamatescu, Loretta Ichim, and Cristian Dragana. 2020. "Advanced UAV–WSN System for Intelligent Monitoring in Precision Agriculture" Sensors 20, no. 3: 817. https://doi.org/10.3390/s20030817
APA StylePopescu, D., Stoican, F., Stamatescu, G., Ichim, L., & Dragana, C. (2020). Advanced UAV–WSN System for Intelligent Monitoring in Precision Agriculture. Sensors, 20(3), 817. https://doi.org/10.3390/s20030817