An Improved Ambiguity-Free Method for Precise GNSS Positioning with Utilizing Single Frequency Receivers

Abstract
:1. Introduction
2. Methodology
2.1. MAFA Method
2.2. Method for Improving the Search Efficiency of MAFA
2.2.1. Simulate Annealing Method Review
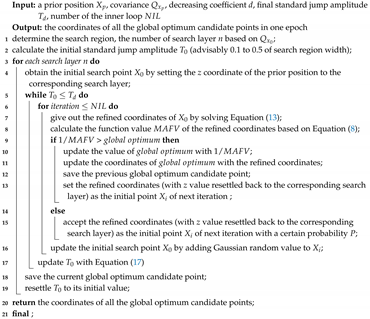
2.2.2. Segmented Simulated Annealing (SSA)
| Algorithm 1: The procedure of the SSA algorithm |
 |
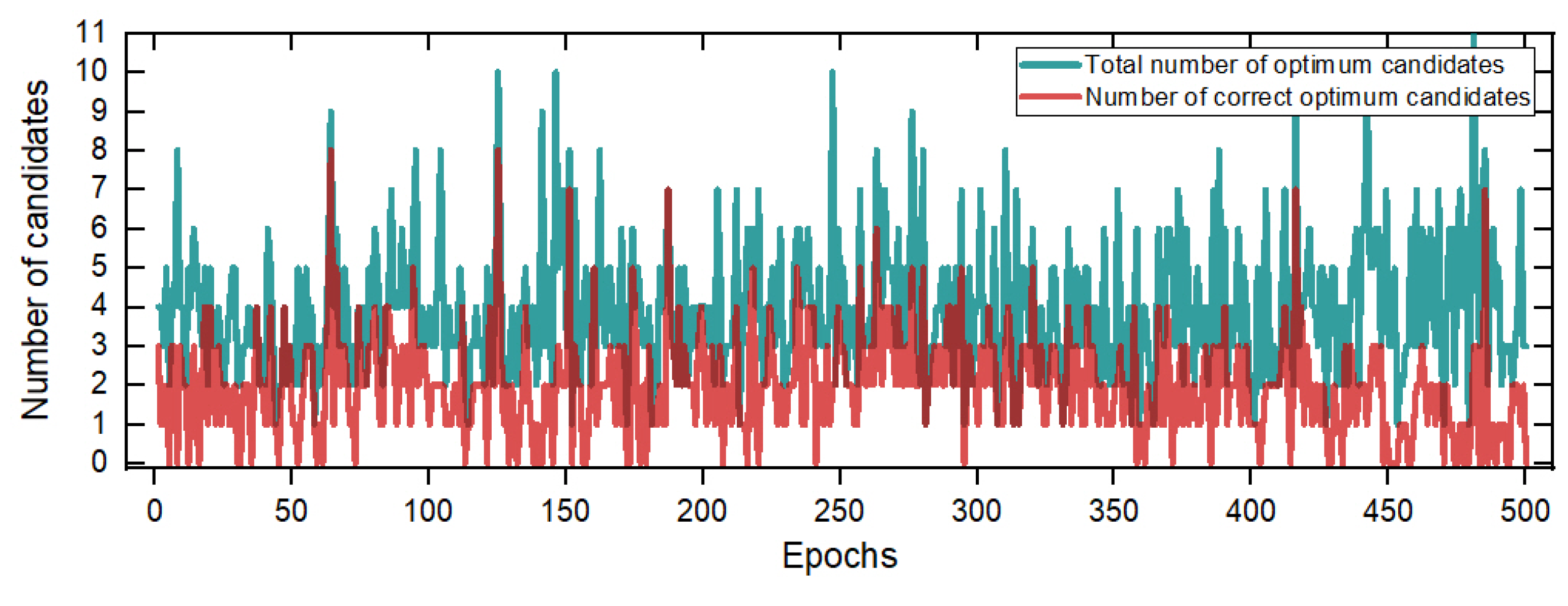
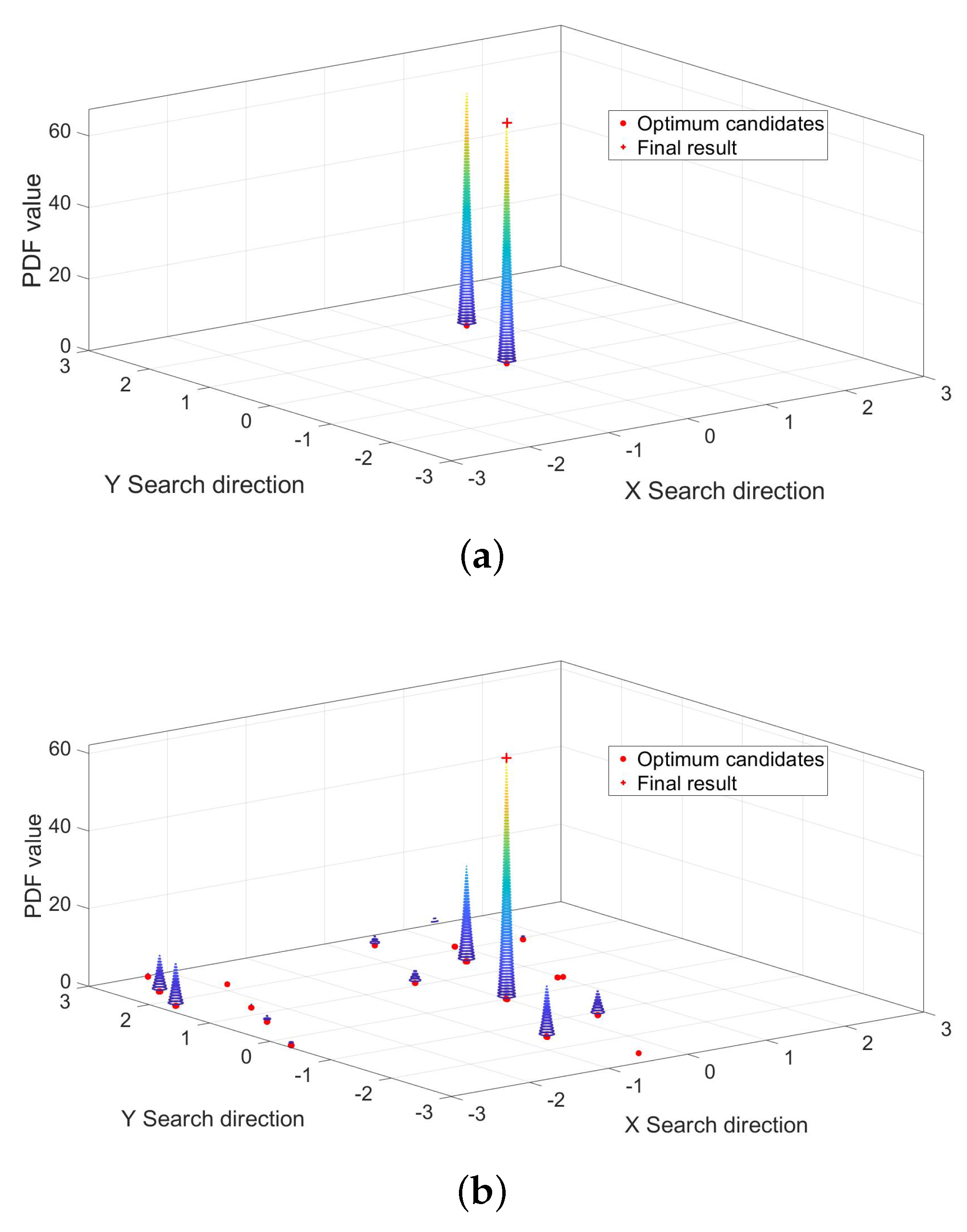
2.3. Kernel Density Estimation Method for Eliminating the False Optimum Candidates
3. Experiment and Analyses
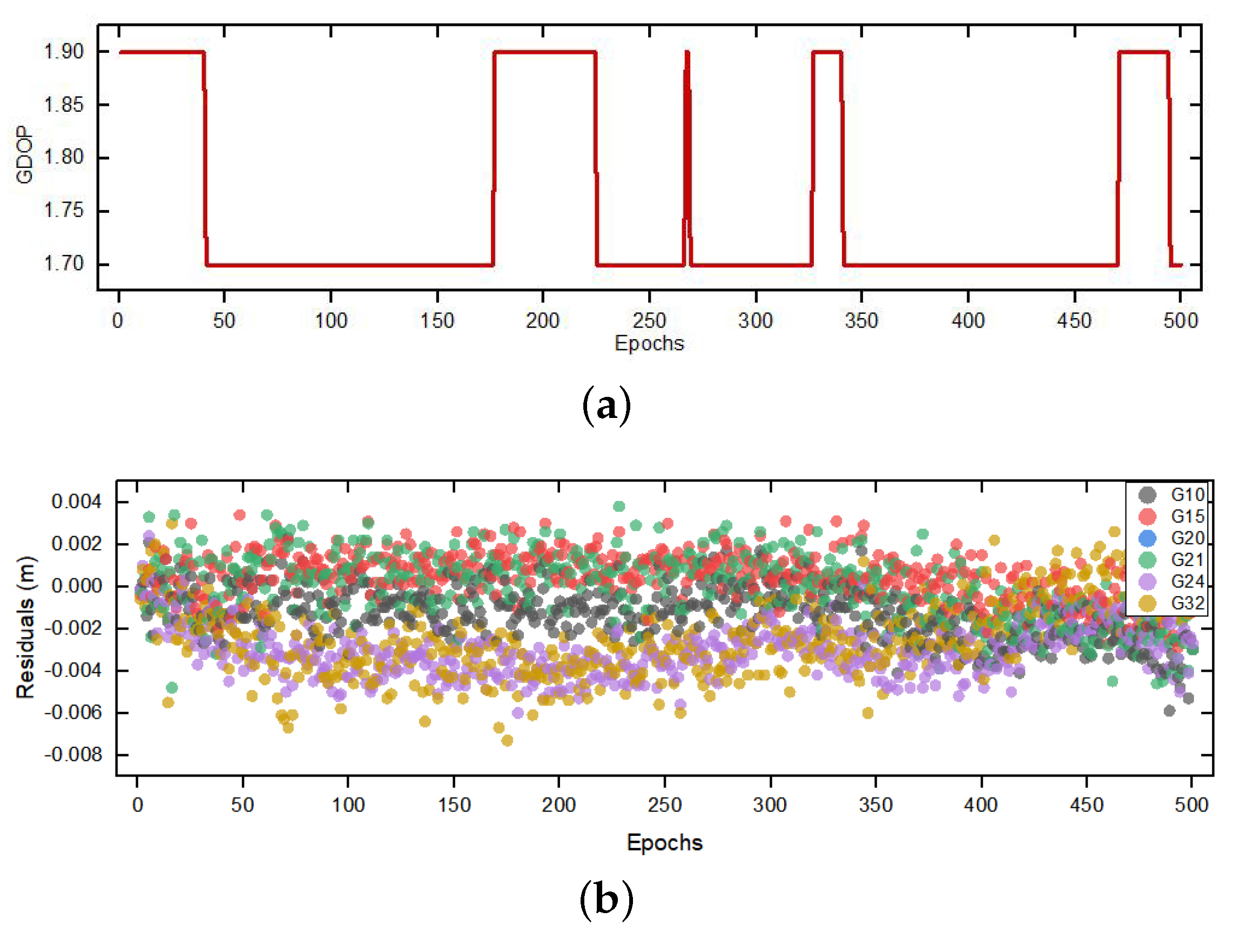
3.1. Precision of SSA-MAFA
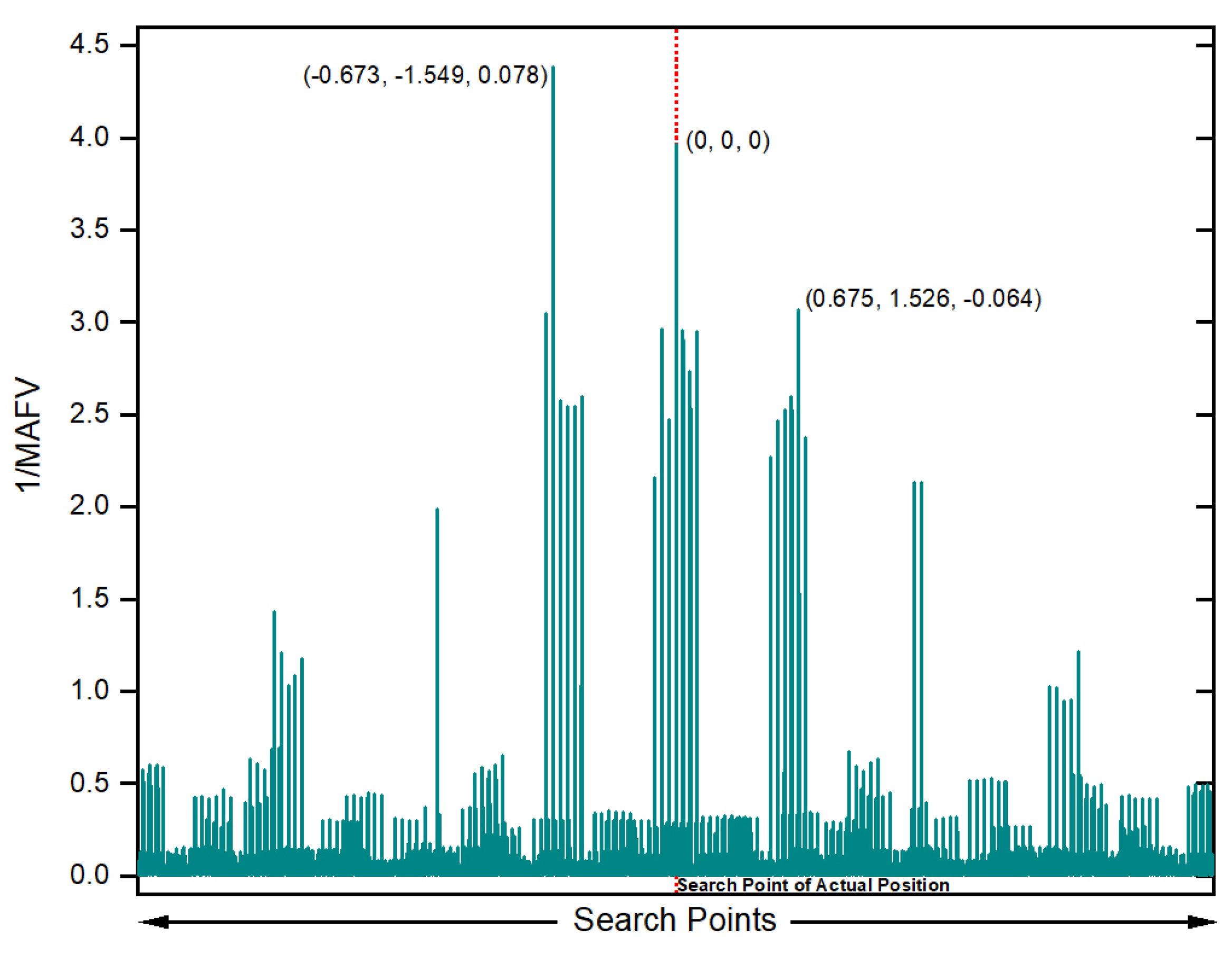
3.1.1. Search with z Coordinate Fixed to Its Reference Value
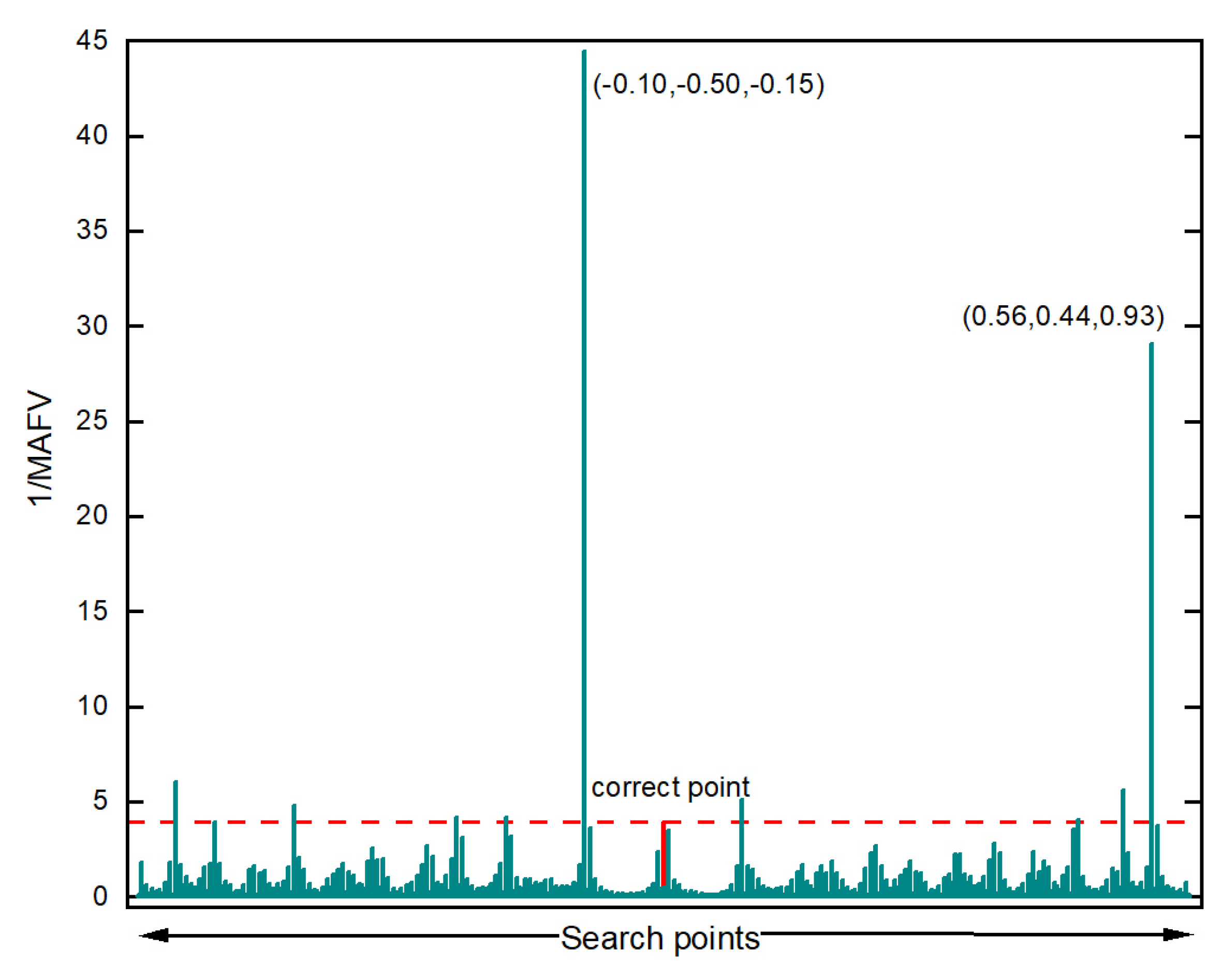
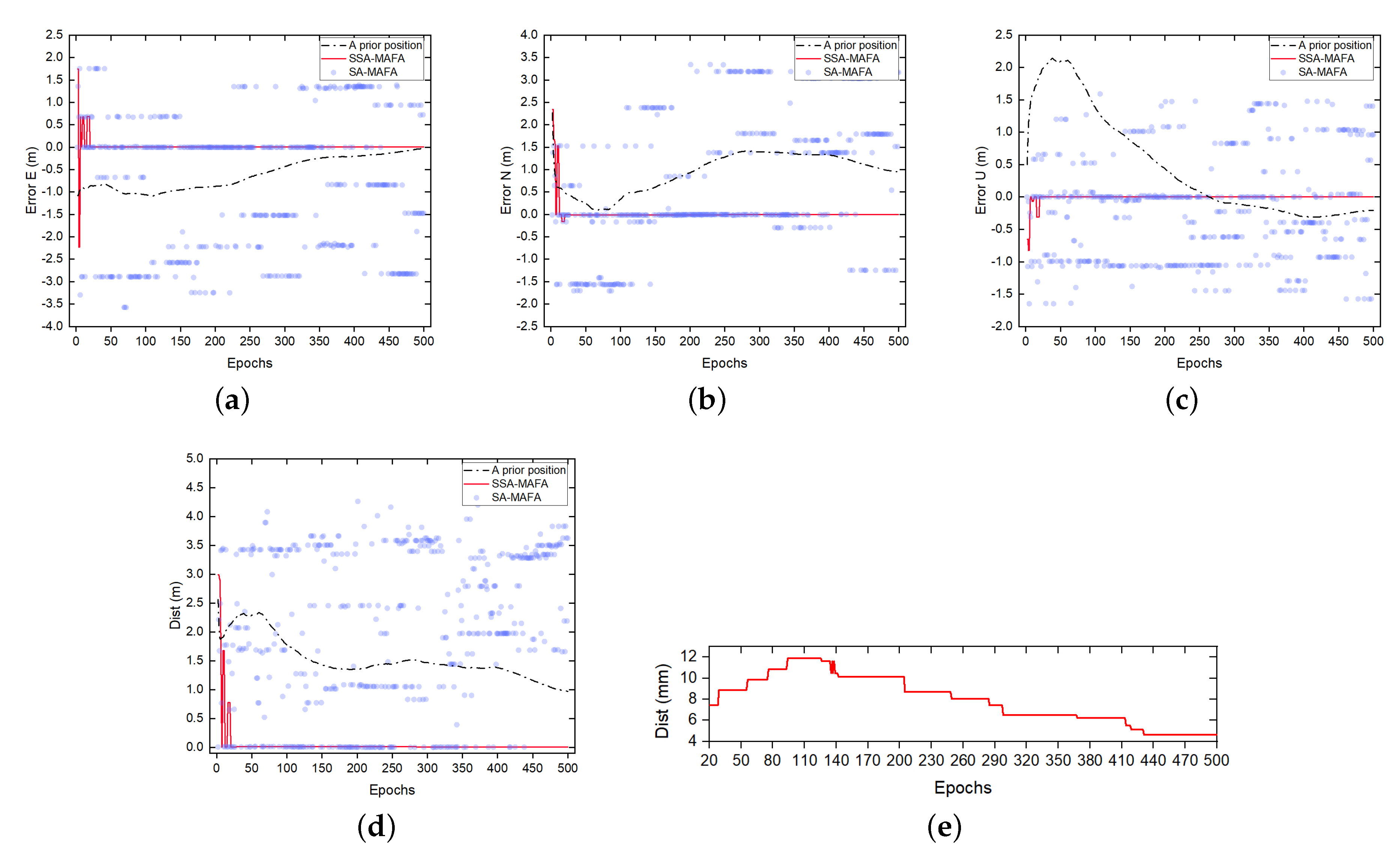
3.1.2. Search in both x, y and z Domain
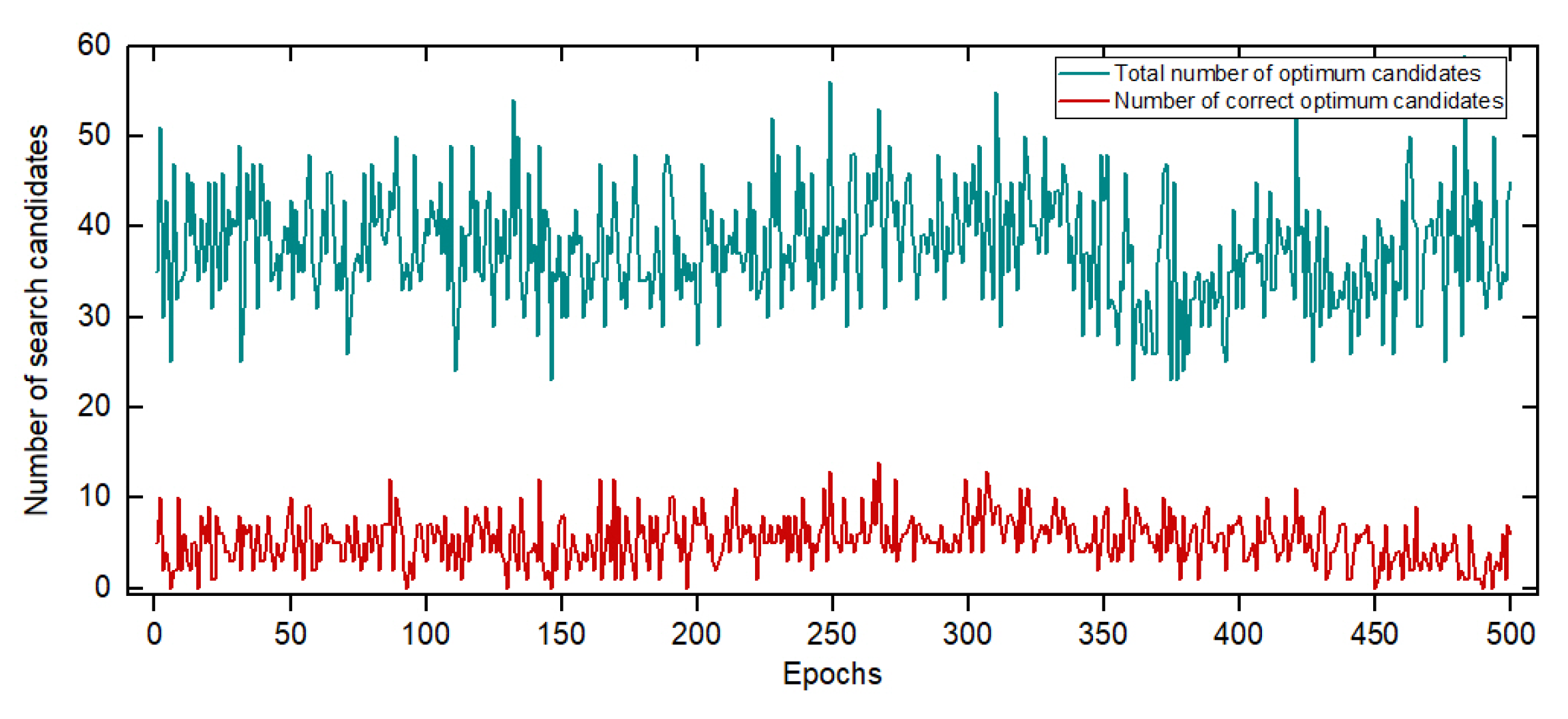
3.2. Search Efficiency of SSA-MAFA
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| GNSS | Global Navigation Satellite System |
| AFM | Ambiguity Function Method |
| MAFA | Modified Ambiguity Function Approach |
| SA-MAFA | Simulated Annealing Modified Ambiguity Function Approach |
| SSA-MAFA | Segmented Simulated Annealing Modified Ambiguity Function Approach |
| MAFV | Modified Ambiguity Function Value |
| LAMBDA | Least-squares Ambiguity Decorrelation Adjustment |
| LSA | Least Squares Adjustment |
| DD | Double Differential |
| MIRLS | Mixed Integer-Real Least Squares |
| KDE | Kernel Density Estimation |
| NIL | Number of the Inner Loop |
| Probability Density Function |
References
- He, H.; Li, J.; Yang, Y.; Xu, J.; Guo, H.; Wang, A. Performance assessment of single- and dual-frequency BeiDou/GPS single-epoch kinematic positioning. GPS Solut. 2014, 18, 393–403. [Google Scholar] [CrossRef]
- Nadarajah, N.; Teunissen, P.J.G.; Sleewaegen, J.; Montenbruck, O. The mixed-receiver BeiDou inter-satellite-type bias and its impact on RTK positioning. GPS Solut. 2015, 19, 357–368. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Precise positioning with current multi-constellation global navigation satellite systems: GPS, GLONASS, Galileo and BeiDou. Sci. Rep. 2015, 5, 8328. [Google Scholar] [CrossRef] [PubMed]
- He, X.; Zhang, X.; Tang, L.; Liu, W. Instantaneous real-time kinematic decimeter-level positioning with BeiDou triple-frequency signals over medium baselines. Sensors 2016, 16, 1. [Google Scholar] [CrossRef] [PubMed]
- Chang, X.W.; Yang, X.; Zhou, T. MLAMBDA: a modified LAMBDA method for integer least-squares estimation. J. Geod. 2005, 79, 552–565. [Google Scholar] [CrossRef] [Green Version]
- Nowel, K.; Cellmer, S.; Kwaśniak, D. Mixed integer–real least squares estimation for precise GNSS positioning using a modified ambiguity function approach. GPS Solut. 2018, 22, 31. [Google Scholar] [CrossRef] [Green Version]
- Joosten, P.; Tiberius, C. Lambda: Faqs. GPS Solut. 2002, 6, 109–114. [Google Scholar] [CrossRef]
- Counselman, C.C.; Gourevitch, S.A. Miniature interferometer terminals for earth surveying: ambiguity and multipath with Global Positioning System. IEEE Trans. Geosci. Remote Sens. 1981, 19, 244–252. [Google Scholar] [CrossRef]
- Remondi, B.W. Pseudo-kinematic GPS Results Using the Ambiguity Function Method. Navigation 1991, 38, 17–36. [Google Scholar] [CrossRef]
- Mader, G.L. Rapid static and kinematic global positioning system solutions using the ambiguity function technique. J. Geophys. Res. Solid Earth 1992, 97, 3271–3283. [Google Scholar] [CrossRef]
- Wang, Y.Q.; Zhan, X.Q.; Zhang, Y.H. Improved ambiguity function method based on analytical resolution for GPS attitude determination. Meas. Sci. Technol. 2007, 18, 2985–2990. [Google Scholar] [CrossRef]
- Mader, G. Ambiguity function techniques for GPS phase initialization and kinematic solutions. In Proceedings of the Second International Symposium on Precise Positioning with the Global Positioning System, Ottawa, ON, Canada, 3–7 September 1990; pp. 1234–1247. [Google Scholar]
- Hedgecock, W.; Maroti, M.; Ledeczi, A.; Volgyesi, P.; Banalagay, R. Accurate real-time relative localization using single-frequency GPS. In Proceedings of the 12th ACM Conference on Embedded Network Sensor Systems, Memphis, TN, USA, 3–6 November 2014; pp. 206–220. [Google Scholar]
- Han, S.; Rizos, C. Improving the computational efficiency of the ambiguity function algorithm. J. Geod. 1996, 70, 330–341. [Google Scholar] [CrossRef]
- Li, X.; Huang, G.; Zhang, Q.; Zhao, Q. A new GPS/BDS tropospheric delay resolution approach for monitoring deformation in super high-rise buildings. GPS Solut. 2018, 22, 90. [Google Scholar] [CrossRef]
- Cellmer, S.; Wielgosz, P.; Rzepecka, Z. Modified ambiguity function approach for GPS carrier phase positioning. J. Geod. 2010, 84, 267–275. [Google Scholar] [CrossRef]
- Cellmer, S. The real time precise positioning using MAFA method. In Proceedings of the International Conference on Environmental Engineering, Vilnius, Lithuania, 19–20 May 2011; Volume 8, pp. 1310–1314. [Google Scholar]
- Cellmer, S. Search procedure for improving modified ambiguity function approach. Surv. Rev. 2013, 45, 380–385. [Google Scholar] [CrossRef]
- Cellmer, S. A graphic representation of the necessary condition for the MAFA method. IEEE Trans. Geosci. Remote Sens. 2011, 50, 482–488. [Google Scholar] [CrossRef]
- Nowel, K.; Cellmer, S.; Kwasniak, D. A Minimum Size of the Search Cube in the MAFA-ILS Method. In Proceedings of the International Conference on Environmental Engineering, Vilnius, Lithuania, 27–28 April 2017; Volume 10, pp. 1–7. [Google Scholar]
- Cellmer, S.; Nowel, K.; Kwaśniak, D. The new search method in precise GNSS positioning. IEEE Trans. Aerosp. Electron. Syst. 2017, 54, 404–415. [Google Scholar] [CrossRef]
- Baselga, S. Ambiguity-free method for fast and precise GNSS differential positioning. J. Surv. Eng. 2013, 140, 22–27. [Google Scholar] [CrossRef] [Green Version]
- Baselga, S. Global optimization applied to GPS positioning by ambiguity functions. Meas. Sci. Technol. 2010, 21, 125102. [Google Scholar] [CrossRef]
- Verhagen, S. Integer ambiguity validation: An open problem? GPS Solut. 2004, 8, 36–43. [Google Scholar] [CrossRef]
- Cellmer, S.; Nowel, K.; Kwasniak, D. Optimization of a grid of candidates in the search procedure of the MAFA method. In Proceedings of the International Conference on Environmental Engineering, Vilnius, Lithuania, 27–28 April 2017; Volume 10, pp. 1–7. [Google Scholar]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Wasle, E. GNSS–Global Navigation Satellite Systems: GPS, GLONASS, Galileo, and More; Springer: Friesach, Austria, 2008; pp. 109–111. [Google Scholar]
- Mekik, E.; Can, O. Multipath effects in RTK GPS and a case study. J. Aeronaut. Astronaut. Aviat. Ser. A 2010, 42, 231–240. [Google Scholar]
- Hassibi, A.; Boyd, S. Integer parameter estimation in linear models with applications to GPS. IEEE Trans. Signal Process. 1998, 46, 2938–2952. [Google Scholar] [CrossRef]
- Kirkpatrick, S. Optimization by simulated annealing: Quantitative studies. J. Stat. Phys. 1984, 34, 975–986. [Google Scholar] [CrossRef]
- Granville, V.; Krivánek, M.; Rasson, J.P. Simulated Annealing: A Proof of Convergence. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 16, 652–656. [Google Scholar] [CrossRef]
- Parzen, E. On estimation of a probability density function and mode. Ann. Math. Stat. 1962, 33, 1065–1076. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 100 | 80 | 50 | 20 | ||
|---|---|---|---|---|---|
| d | |||||
| 0.99 | 1.076 | 0.862 | 0.568 | 0.226 | |
| 0.9 | 0.112 | 0.086 | 0.0535 | 0.021 | |
| 0.8 | 0.053 | 0.041 | 0.026 | 0.012 | |
| 100 | 80 | 50 | 20 | ||
|---|---|---|---|---|---|
| d | |||||
| 0.99 | 2 | 7 | 4 | 6 | |
| 0.9 | 2 | 6 | 19 | 11 | |
| 0.8 | 10 | 24 | 33 | 27 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, W.; Liu, Y.; Liu, F. An Improved Ambiguity-Free Method for Precise GNSS Positioning with Utilizing Single Frequency Receivers. Sensors 2020, 20, 856. https://doi.org/10.3390/s20030856
Yang W, Liu Y, Liu F. An Improved Ambiguity-Free Method for Precise GNSS Positioning with Utilizing Single Frequency Receivers. Sensors. 2020; 20(3):856. https://doi.org/10.3390/s20030856
Chicago/Turabian StyleYang, Wenhao, Yue Liu, and Fanming Liu. 2020. "An Improved Ambiguity-Free Method for Precise GNSS Positioning with Utilizing Single Frequency Receivers" Sensors 20, no. 3: 856. https://doi.org/10.3390/s20030856