On-Line Visual Tracking with Occlusion Handling †

 ,
,  , and
, and
Abstract
:1. Introduction
2. Background
2.1. Labeled RFS
2.2. The GLMB Filter
3. Problem Statement
4. Proposed Method
4.1. False Alarm Removal and Detection
- The two objects must have substantial overlap.
- must be older than .
- The two objects must be similar in size (in terms of image pixels).
| Algorithm 1 Pseudocode for the proposed false alarm removal and detection algorithm. |
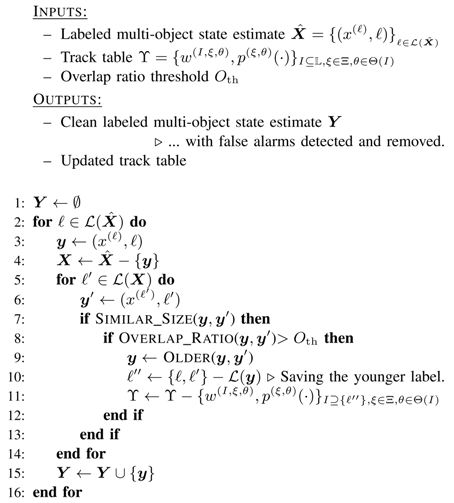 |
- Step 9: Determine the target associated with the older label.
- Step 10: Use the above information to determine the label of the younger target and store it temporarily.
- Step 11: Remove the track associated with the younger target (as calculated in the two previous steps).
4.2. Label Recovery
| Algorithm 2: Pseudocode for the proposed label recovery algorithm. |
 |
5. Experimental Results
5.1. Target Motion and Measurement Models
5.2. Performance Metrics and Datasets
- –
- recall (REC - ↑): Correctly tracked objects over total ground truth;
- –
- precision (PRE - ↑): Correctly tracked objects over total tracking results;
- –
- false alarms per frame (FAF - ↓)
- –
- percentage of objects tracked for more than 80% of their life time (MT - ↑);
- –
- percentage of objects tracked for less than 20% of their life time (ML - ↓);
- –
- percentage of partially tracked objects (PT ↓ = 1 - MT - ML);
- –
- identity switches (IDS - ↓);
- –
- the number of fragmentations (Frag - ↓) of ground truth trajectories.
- –
- view 1 of S2L1 sequence from PETS2009 dataset;
- –
- TUD-Stadtmitte sequence from ETH dataset; and
- –
- Bahnhof and Sunnyday sequences from ETH dataset.
5.2.1. PETS2009 S2L1 View1
5.2.2. TUD-Stadtmitte
5.2.3. ETH Bahnhof and Sunnyday
5.3. Ablation Study
5.4. Computational Cost
6. Conclusions and Future Work
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Rathnayake, T.; Hoseinnezhad, R.; Tennakoon, R.; Bab-Hadiashar, A. Labeled multi-Bernoulli tracking for industrial mobile platform safety. In Proceedings of the 2017 IEEE International Conference on Mechatronics (ICM), Churchill, VIC, Australia, 13–15 February 2017; pp. 393–398. [Google Scholar]
- Rae, A.; Khamis, A.; Basir, O.; Kamel, M. Particle filtering for bearing-only audio-visual speaker detection and tracking. In Proceedings of the 2009 3rd International Conference on Signals, Circuits and Systems (SCS), Medenine, Tunisia, 6–8 November 2009; pp. 1–6. [Google Scholar]
- Orlando, D.; Venturino, L.; Lops, M.; Ricci, G. Track-before-detect strategies for STAP radars. IEEE Trans. Signal Process. 2010, 58, 933–938. [Google Scholar] [CrossRef]
- Caron, G.; Dame, A.; Marchand, E. Direct model based visual tracking and pose estimation using mutual information. Image Vis. Comput. 2014, 32, 54–63. [Google Scholar] [CrossRef] [Green Version]
- Meijering, E.; Smal, I.; Danuser, G. Tracking in molecular bioimaging. IEEE Signal Process Mag. 2006, 23, 46–53. [Google Scholar] [CrossRef] [Green Version]
- Gostar, A.K.; Hoseinnezhad, R.; Bab-Hadiashar, A. Robust multi-Bernoulli sensor selection for multi-target tracking in sensor networks. IEEE Signal Process. Lett. 2013, 20, 1167–1170. [Google Scholar] [CrossRef]
- Rathnayake, T. Multi-Object Tracking in Video Using Labeled Random Finite Sets. Ph.D. Thesis, RMIT University, Melbourne, Australia, November 2018. [Google Scholar]
- Karanam, S.; Li, Y.; Radke, R.J. Person re-identification with block sparse recovery. Image Vis. Comput. 2017, 60, 75–90. [Google Scholar] [CrossRef]
- Breitenstein, M.D.; Reichlin, F.; Leibe, B.; Koller-Meier, E.; Van Gool, L. Online multiperson tracking-by-detection from a single, uncalibrated camera. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 1820–1833. [Google Scholar] [CrossRef] [PubMed]
- Okuma, K.; Taleghani, A.; De Freitas, N.; Little, J.J.; Lowe, D.G. A boosted particle filter: Multitarget detection and tracking. In Proceedings of the European Conference on Computer Vision, Prague, Czech Republic, 11–14 May 2004; pp. 28–39. [Google Scholar]
- Song, X.; Cui, J.; Zha, H.; Zhao, H. Vision-based multiple interacting targets tracking via online supervised learning. In Proceedings of the European Conference on Computer Vision, Marseille, France, 12–18 October 2008; pp. 642–655. [Google Scholar]
- Takala, V.; Pietikainen, M. Multi-object tracking using color, texture and motion. In Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition, Minneapolis, MN, USA, 17–22 June 2007; pp. 1–7. [Google Scholar]
- Yang, B.; Yang, R. Interactive particle filter with occlusion handling for multi-target tracking. In Proceedings of the 2015 12th International Conference on Fuzzy Systems and Knowledge Discovery (FSKD), Zhangjiajie, China, 15–17 August 2015; pp. 1945–1949. [Google Scholar]
- Possegger, H.; Mauthner, T.; Roth, P.M.; Bischof, H. Occlusion geodesics for online multi-object tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014; pp. 1306–1313. [Google Scholar]
- Andriyenko, A.; Schindler, K.; Roth, S. Discrete-continuous optimization for multi-target tracking. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 1926–1933. [Google Scholar]
- Milan, A.; Roth, S.; Schindler, K. Continuous energy minimization for multitarget tracking. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 58–72. [Google Scholar] [CrossRef] [PubMed]
- Pirsiavash, H.; Ramanan, D.; Fowlkes, C.C. Globally-optimal greedy algorithms for tracking a variable number of objects. In Proceedings of the 2011 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 20–25 June 2011; pp. 1201–1208. [Google Scholar]
- Yang, B.; Nevatia, R. Multi-target tracking by online learning of nonlinear motion patterns and robust appearance models. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 1918–1925. [Google Scholar]
- Yang, B.; Nevatia, R. An online learned CRF model for multi-target tracking. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 2034–2041. [Google Scholar]
- Chen, L.; Peng, X.; Ren, M. Recurrent metric networks and batch multiple hypothesis for multi-object tracking. IEEE Access 2018, 7, 3093–3105. [Google Scholar] [CrossRef]
- Yang, H.; Qu, S.; Chen, C.; Yang, B. Multiple objects tracking with improved sparse representation and rank based dynamic estimation. IEEE Access 2018, 6, 42264–42278. [Google Scholar] [CrossRef]
- Shu, G.; Dehghan, A.; Oreifej, O.; Hand, E.; Shah, M. Part-based multiple-person tracking with partial occlusion handling. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 1815–1821. [Google Scholar]
- Pham, T.T.T.; Le, T.; Vu, H.; Dao, T.K.P. Fully-automated person re-identification in multi-camera surveillance system with a robust kernel descriptor and effective shadow removal method. Image Vis. Comput. 2017, 59, 44–62. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, J.; Zhang, S.; Gong, Y. Visual tracking based on online sparse feature learning. Image Vis. Comput. 2015, 38, 24–32. [Google Scholar] [CrossRef]
- Rathnayake, T.; Gostar, A.K.; Hoseinnezhad, R.; Bab-Hadiashar, A. Labeled multi-Bernoulli track-before-detect for multi-target tracking in video. In Proceedings of the 2015 18th International Conference on Information Fusion (Fusion), Washington, DC, USA, 6–9 July 2015; pp. 1353–1358. [Google Scholar]
- Vo, B.-N.; Singh, S.; Doucet, A. Sequential Monte Carlo methods for multitarget filtering with random finite sets. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1224–1245. [Google Scholar]
- Hoseinnezhad, R.; Vo, B.-N.; Suter, D.; Vo, B.-T. Multi-object filtering from image sequence without detection. In Proceedings of the 2010 IEEE International Conference on Acoustics, Speech and Signal Processing, Dallas, TX, USA, 14–19 March 2010; pp. 1154–1157. [Google Scholar]
- Isard, M.; MacCormick, J. BraMBLe: A Bayesian multiple-blob tracker. In Proceedings of the Eighth IEEE International Conference on Computer Vision. ICCV 2001, Vancouver, BC, Canada, 7–14 July 2001; pp. 34–41. [Google Scholar]
- Bar-Shalom, Y. Tracking and Data Association; Academic Press Professional, Inc.: San Diego, CA, USA, 1988. [Google Scholar]
- Ur-Rehman, A.; Naqvi, S.M.; Mihaylova, L.; Chambers, J.A. Multi-target tracking and occlusion handling with learned variational Bayesian clusters and a social force model. IEEE Trans. Signal Process 2015, 64, 1320–1335. [Google Scholar] [CrossRef] [Green Version]
- Oh, S.; Russell, S.; Sastry, S. Markov chain Monte Carlo data association for general multiple-target tracking problems. In Proceedings of the 2004 43rd IEEE Conference on Decision and Control (CDC) (IEEE Cat. No.04CH37601), Nassau, Bahamas, 14–17 December; pp. 735–742.
- Yu, Q.; Medioni, G. Map-enhanced detection and tracking from a moving platform with local and global data association. In Proceedings of the 2007 IEEE Workshop on Motion and Video Computing (WMVC’07), Austin, TX, USA, 23–24 February 2007; p. 3. [Google Scholar]
- Stauffer, C. Estimating tracking sources and sinks. In Proceedings of the 2003 Conference on Computer Vision and Pattern Recognition Workshop, Madison, WI, USA, 16–22 June 2003; p. 35. [Google Scholar]
- Kaucic, R.; Perera, A.G.A.; Brooksby, G.; Kaufhold, J.; Hoogs, A. A unified framework for tracking through occlusions and across sensor gaps. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; pp. 990–997. [Google Scholar]
- Perera, A.G.A.; Srinivas, C.; Hoogs, A.; Brooksby, G.; Hu, W. Multi-object tracking through simultaneous long occlusions and split-merge conditions. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 17–22 June 2006; pp. 666–673. [Google Scholar]
- Cox, L.J.; Hingorani, S.L. An efficient implementation of Reid’s multiple hypothesis tracking algorithm and its evaluation for the purpose of visual tracking. IEEE Trans. Pattern Anal. Mach. Intell. 1996, 18, 138–150. [Google Scholar] [CrossRef] [Green Version]
- Han, B.; Zhu, Y.; Comaniciu, D.; Davis, L. Kernel-based Bayesian filtering for object tracking. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; pp. 227–234. [Google Scholar]
- Yoon, J.H.; Yang, M.-H.; Lim, J.; Yoon, K.-J. Bayesian multi-object tracking using motion context from multiple objects. In Proceedings of the 2015 IEEE Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 5–9 January 2015; pp. 33–40. [Google Scholar]
- Mahler, R.P. Statistical Multisource-Multitarget Information Fusion; Artech House: Norwood, MA, USA, 2007. [Google Scholar]
- Vo, B.-N.; Ma, W.-K. The Gaussian mixture probability hypothesis density filter. IEEE Trans. Signal Process. 2006, 54, 4091–4104. [Google Scholar] [CrossRef]
- Vo, B.-T.; Vo, B.-N.; Cantoni, A. Analytic implementations of the cardinalized probability hypothesis density filter. IEEE Trans. Signal Process. 2007, 55, 3553–3567. [Google Scholar] [CrossRef]
- Wang, Y.-D.; Wu, J.-K.; Kassim, A.A.; Huang, W. Data-driven probability hypothesis density filter for visual tracking. IEEE Trans. Circuits Syst. Video Technol. 2008, 18, 1085–1095. [Google Scholar] [CrossRef]
- Maggio, E.; Taj, M.; Cavallaro, A. Efficient multitarget visual tracking using random finite sets. IEEE Trans. Circuits Syst. Video Technol. 2008, 18, 1016–1027. [Google Scholar] [CrossRef] [Green Version]
- Pham, N.T.; Huang, W.; Ong, S. Probability hypothesis density approach for multi-camera multi-object tracking. In Proceedings of the Asian Conference on Computer Vision, Tokyo, Japan, 18–22 November 2007; pp. 875–884. [Google Scholar]
- Vo, B.-T.; Vo, B.-N.; Cantoni, A. The cardinality balanced multi-target multi-Bernoulli filter and its implementations. IEEE Trans. Signal Process. 2009, 57, 409–423. [Google Scholar]
- Reuter, S.; Vo, B.-T.; Vo, B.-N.; Dietmayer, K. The labeled multi-Bernoulli filter. IEEE Trans. Signal Process. 2014, 62, 3246–3260. [Google Scholar]
- Vo, B.-T.; Vo, B.-N. Labeled random finite sets and multi-object conjugate priors. IEEE Trans. Signal Process. 2013, 61, 3460–3475. [Google Scholar] [CrossRef]
- Vo, B.-N.; Vo, B.-T.; Phung, D. Labeled random finite sets and the Bayes multi-target tracking filter. IEEE Trans. Signal Process. 2014, 62, 6554–6567. [Google Scholar] [CrossRef] [Green Version]
- Hoseinnezhad, R.; Vo, B.-N.; Vo, B.-T.; Suter, D. Visual tracking of numerous targets via multi-Bernoulli filtering of image data. Pattern Recognit. 2012, 45, 3625–3635. [Google Scholar] [CrossRef]
- Hoseinnezhad, R.; Vo, B.-N.; Vo, B.-T. Visual tracking in background subtracted image sequences via multi-Bernoulli filtering. IEEE Trans. Signal Process. 2013, 61, 392–397. [Google Scholar] [CrossRef]
- Yuthika Punchihewa, F.P.; Hoseinnezhad, R. Multiple target tracking in video data using labeled random finite set. In Proceedings of the 2014 International Conference on Control, Automation and Information Sciences (ICCAIS 2014), Gwangju, Korea, 2–5 December 2014; pp. 13–18. [Google Scholar]
- Beard, M.; Vo, B.-T.; Vo, B.-N. Bayesian multi-target tracking with merged measurements using labelled random finite sets. IEEE Trans. Signal Process. 2015, 63, 1433–1447. [Google Scholar] [CrossRef]
- Rathnayake, T.; Tennakoon, R.; Khodadadian Gostar, A.; Bab-Hadiashar, A.; Hoseinnezhad, R. Information fusion for industrial mobile platform safety via track-before-detect labeled multi-bernoulli filter. Sensors 2019, 19, 2016. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Reuter, S. Multi-Object Tracking Using Random Finite Sets. Ph.D. Thesis, Universität Ulm, Ulm, Baden-Württemberg, Germany, September 2014. [Google Scholar]
- Beard, M.; Reuter, S.; Granström, K.; Vo, B.-T.; Vo, B.-N.; Scheel, A. A generalised labelled multi-Bernoulli filter for extended multi-target tracking. In Proceedings of the 2015 18th International Conference on Information Fusion (Fusion), Washington, DC, USA, 6–9 July 2015; pp. 991–998. [Google Scholar]
- Kim, D.Y.; Vo, B.-T.; Vo, B.-N. Data fusion in 3D vision using a RGB-D data via switching observation model and its application to people tracking. In Proceedings of the 2013 International Conference on Control, Automation and Information Sciences (ICCAIS), Nha Trang, Vietnam, 25–28 November 2013; pp. 91–96. [Google Scholar]
- Rathnayake, T.; Gostar, A.K.; Bab-Hadiashar, A. Occlusion handling for online visual tracking using labeled random set filters. In Proceedings of the 2017 International Conference on Control, Automation and Information Sciences (ICCAIS), Chiang Mai, Thailand, 31 October–1 November 2017; pp. 151–156. [Google Scholar]
- Reuter, S.; Dietmayer, K. Pedestrian tracking using random finite sets. In Proceedings of the 14th International Conference on Information Fusion, Chicago, IL, USA, 5–8 July 2011; pp. 1–8. [Google Scholar]
- Bashir, F.; Porikli, F. Performance evaluation of object detection and tracking systems. In Proceedings of the 9th IEEE International Workshop on Performance Evaluation of Tracking and Surveillance, New York, NY, USA, 18 June 2006; pp. 7–14. [Google Scholar]
- Ess, A.; Leibe, B.; Schindler, K.; Van Gool, L. A mobile vision system for robust multi-person tracking. In Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 23–28 June 2008; pp. 1–8. [Google Scholar]
- Mahler, R. Advances in Statistical Multisource-Multitarget Information Fusion; Artech House: London, UK, 2014. [Google Scholar]
- Clark, D.; Ristic, B.; Vo, B.-N.; Vo, B.T. Bayesian multi-object filtering with amplitude feature likelihood for unknown object snr. IEEE Trans. Signal Process. 2009, 58, 26–37. [Google Scholar] [CrossRef]
- Inostroza, F.; Adams, M.; Leung, K. Modeling detection statistics in feature-based robotic navigation for range sensors. Navigation 2018, 65, 297–318. [Google Scholar] [CrossRef]
- Blei, D.M.; Frazier, P.I. Distance-dependent Chinese restaurant processes. J. Mach. Learn. Res. 2011, 12, 2461–2488. [Google Scholar]
- Pérez, P.; Hue, C.; Vermaak, J.; Gangnet, M. Color-based probabilistic tracking. In Proceedings of the European Conference on Computer Vision, Copenhagen, Denmark, 28–31 May 2002; pp. 661–675. [Google Scholar]
- Nummiaro, K.; Koller-Meier, E.; Van Gool, L. Object tracking with an adaptive color-based particle filter. Pattern Recognit. 2002, 2449, 353–360. [Google Scholar]
- Ohba, K.; Sato, Y.; Ikeuchi, K. Appearance-based visual learning and object recognition with illumination invariance. Mach. Vis. Appl. 2000, 12, 189–196. [Google Scholar] [CrossRef]
- Kim, S.; Kwak, S.; Feyereisl, J.; Han, B. Online multi-target tracking by large margin structured learning. In Proceedings of the Asian Conference on Computer Vision, Daejeon, Korea, 5–9 November 2012; pp. 98–111. [Google Scholar]
- Kuo, C.-H.; Nevatia, R. How does person identity recognition help multi-person tracking? In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition 2011, Colorado Springs, CO, USA, 20–25 June 2011; pp. 1217–1224. [Google Scholar]
- Berclaz, J.; Fleuret, F.; Turetken, E.; Fua, P. Multiple object tracking using k-shortest paths optimization. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 1806–1819. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Milan, A.; Leal-Taixe, L.; Reid, I.; Roth, S.; Schindler, K. MOT16: A benchmark for multi-object tracking. arXiv 2016, arXiv:1603.00831. [Google Scholar]
- Li, Y.; Huang, C.; Nevatia, R. Learning to associate: Hybridboosted multi-target tracker for crowded scene. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 2953–2960. [Google Scholar]
- Poiesi, F.; Mazzon, R.; Cavallaro, A. Multi-target tracking on confidence maps: An application to people tracking. Comput. Vis. Image Underst. 2013, 117, 1257–1272. [Google Scholar] [CrossRef]
- Bae, S.-H.; Yoon, K.-J. Robust online multiobject tracking with data association and track management. IEEE Trans. Image Process. 2014, 23, 2820–2833. [Google Scholar] [PubMed]
- Bracewell, R.N. The Fourier Transform and Its Applications; McGraw-Hill: New York, NY, USA, 1986. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Notation/Abbreviation | Description |
|---|---|
| Label space of new born targets | |
| Index space | |
| Label space of existing objects | |
| Space of natural numbers | |
| Space of real numbers | |
| State space | |
| Measurement Space | |
| L | Set of track labels |
| X | Set of state vectors |
| X | Set of labeled state vectors |
| Z | Set of measurements at |
| time | |
| Set of all measurements | |
| up to time | |
| RFS | Random Finite Sets |
| LMB | Labeled Multi-Bernoulli |
| GLMB | Generalized labeled |
| Multi-Bernoulli | |
| SMC | Sequential Monte Carlo |
 represents online methods.
represents online methods.
represents online methods.
represents online methods.| Dataset | Method | REC ↑ | PRE ↑ | FAF ↓ | GT | MT ↑ | PT ↓ | ML ↓ | Frag ↓ | IDS ↓ |
|---|---|---|---|---|---|---|---|---|---|---|
| PETS09-S2L1 | GLMB (Ours) | 93.3% | 96.9% | 0.17 | 19 | 94.7% | 5.3% | 0.0% | 20 | 0 |
| StruckMOT [68] (o.t.) | 97.2% | 93.7% | 0.38 | 19 | 94.7% | 5.3% | 0.0% | 19 | 4 | |
| RMOT [38] | 96.9% | 97.4% | 0.15 | 19 | 89.5% | 10.5% | 0.0% | 7 | 2 | |
| GeodesicTracker [14] | - | - | - | 23 | 100.0% | 0.0% | 0.0% | 16 | 9 | |
| Nonlinear motion [18] (s.c.) | 91.8% | 99.0% | 0.05 | 19 | 89.5% | 10.5% | 0.0% | 9 | 0 | |
| CemTracker [16] | - | - | - | 19 | 94.7% | 5.3% | 0.0% | 15 | 22 | |
| KSP [70] | - | - | - | 23 | 73.9% | 5.3% | 0.1% | 22 | 13 | |
| TUD - Stadtmitte | GLMB (Ours) | 87.1% | 97.1% | 0.16 | 10 | 80.0% | 20.0% | 0.0% | 6 | 0 |
| StruckMOT [68] (o.t.) | 87.3% | 95.4% | 0.25 | 10 | 80.0% | 20.0% | 0.0% | 11 | 0 | |
| RMOT [38] | 87.9% | 96.6% | 0.19 | 10 | 80.0% | 20.0% | 0.0% | 7 | 6 | |
| PRIMPT [69] (o.t.) | 81.0% | 99.5% | 0.028 | 10 | 60.0% | 30.0% | 10.0% | 0 | 1 | |
| OnlineCRF [19] | 87.0% | 96.7% | 0.18 | 10 | 70.0% | 30.0% | 0.0% | 1 | 0 | |
| CemTracker [16] | - | - | - | 10 | 40.0% | 60.0% | 0.0% | 13 | 15 | |
| KSP [70] | - | - | - | 9 | 11.0% | 5.3% | 0.1% | 15 | 5 | |
| ETH Bahnhof and Sunnyday | GLMB (Ours) | 77.1% | 83.6% | 1.161 | 124 | 54.0% | 40.3% | 5.6% | 91 | 31 |
| StruckMOT [68] (o.t.) | 78.4% | 84.1% | 0.98 | 124 | 62.7% | 29.6% | 7.7% | 72 | 5 | |
| RMOT [38] | 81.5% | 86.3% | 0.98 | 124 | 67.7% | 27.4% | 4.8% | 38 | 40 | |
| MT-TB [73] | 78.7% | 85.5% | - | 125 | 62.4% | 29.6% | 8.0% | 69 | 45 | |
| PRIMPT [69] (o.t.) | 76.8% | 86.6% | 0.89 | 125 | 58.4% | 33.6% | 8.0% | 23 | 11 | |
| OnlineCRF [19] | 79.0% | 85.0% | 0.64 | 125 | 68.0% | 24.8% | 7.2% | 19 | 11 | |
| CemTracker [16] | 77.3% | 87.2% | - | 124 | 66.4% | 25.4% | 8.2% | 69 | 57 |
| Dataset | Algorithm | REC ↑ | PRE ↑ | FAF ↓ | GT | MT ↑ | PT ↓ | ML ↓ | Frag ↓ | IDS ↓ |
|---|---|---|---|---|---|---|---|---|---|---|
| PETS2009-S2L1V1 | GLMB | 92.1% | 90.4% | 0.30 | 19 | 94.7% | 5.3% | 0.0% | 44 | 9 |
| GLMB + FADR | 92.4% | 96.0% | 0.17 | 19 | 94.7% | 5.3% | 0.0% | 42 | 10 | |
| GLMB + FADR + LR | 93.3% | 96.9% | 0.17 | 19 | 94.7% | 5.3% | 0.0% | 20 | 0 | |
| TUD-Stadtmitte | GLMB | 84.9% | 90.1% | 0.35 | 10 | 80.0% | 20.0% | 0.0% | 12 | 14 |
| GLMB + FADR | 85.8% | 97.0% | 0.17 | 10 | 80.0% | 20.0% | 0.0% | 13 | 13 | |
| GLMB + FADR + LR | 87.1% | 97.1% | 0.16 | 10 | 80.0% | 20.0% | 0.0% | 6 | 0 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rathnayake, T.; Khodadadian Gostar, A.; Hoseinnezhad, R.; Tennakoon, R.; Bab-Hadiashar, A. On-Line Visual Tracking with Occlusion Handling. Sensors 2020, 20, 929. https://doi.org/10.3390/s20030929
Rathnayake T, Khodadadian Gostar A, Hoseinnezhad R, Tennakoon R, Bab-Hadiashar A. On-Line Visual Tracking with Occlusion Handling. Sensors. 2020; 20(3):929. https://doi.org/10.3390/s20030929
Chicago/Turabian StyleRathnayake, Tharindu, Amirali Khodadadian Gostar, Reza Hoseinnezhad, Ruwan Tennakoon, and Alireza Bab-Hadiashar. 2020. "On-Line Visual Tracking with Occlusion Handling" Sensors 20, no. 3: 929. https://doi.org/10.3390/s20030929
APA StyleRathnayake, T., Khodadadian Gostar, A., Hoseinnezhad, R., Tennakoon, R., & Bab-Hadiashar, A. (2020). On-Line Visual Tracking with Occlusion Handling. Sensors, 20(3), 929. https://doi.org/10.3390/s20030929