Dual-Axis Metasurface Strain Sensor Based on Polarization–Phase-Deformation Relationship


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
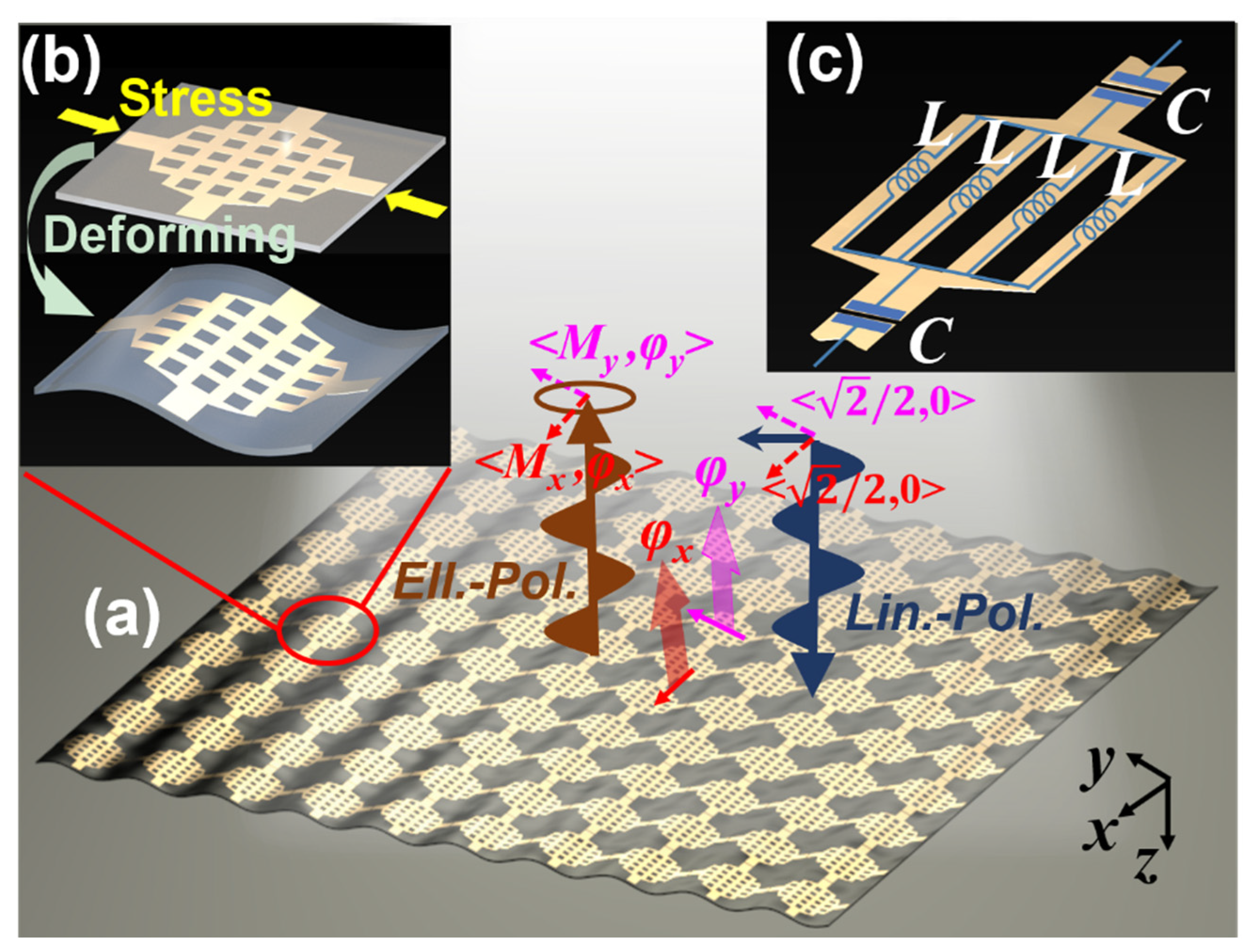
2. Phase-Polarization Relationship Analysis
3. Strain-Sensing Design and Simulation
3.1. Matesurface Strain Sensor Design
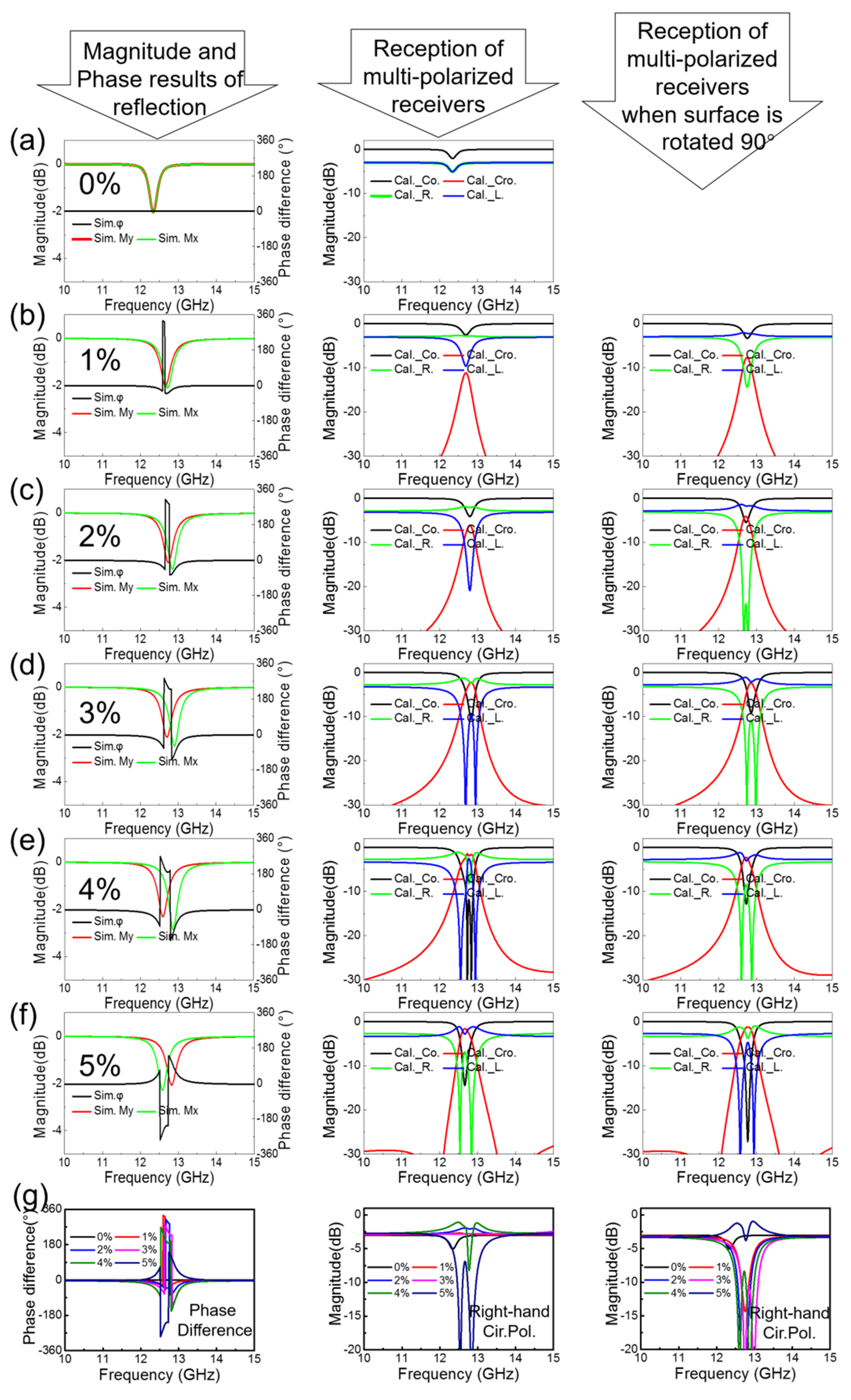
3.2. Sensor Simulation and Results Analysis
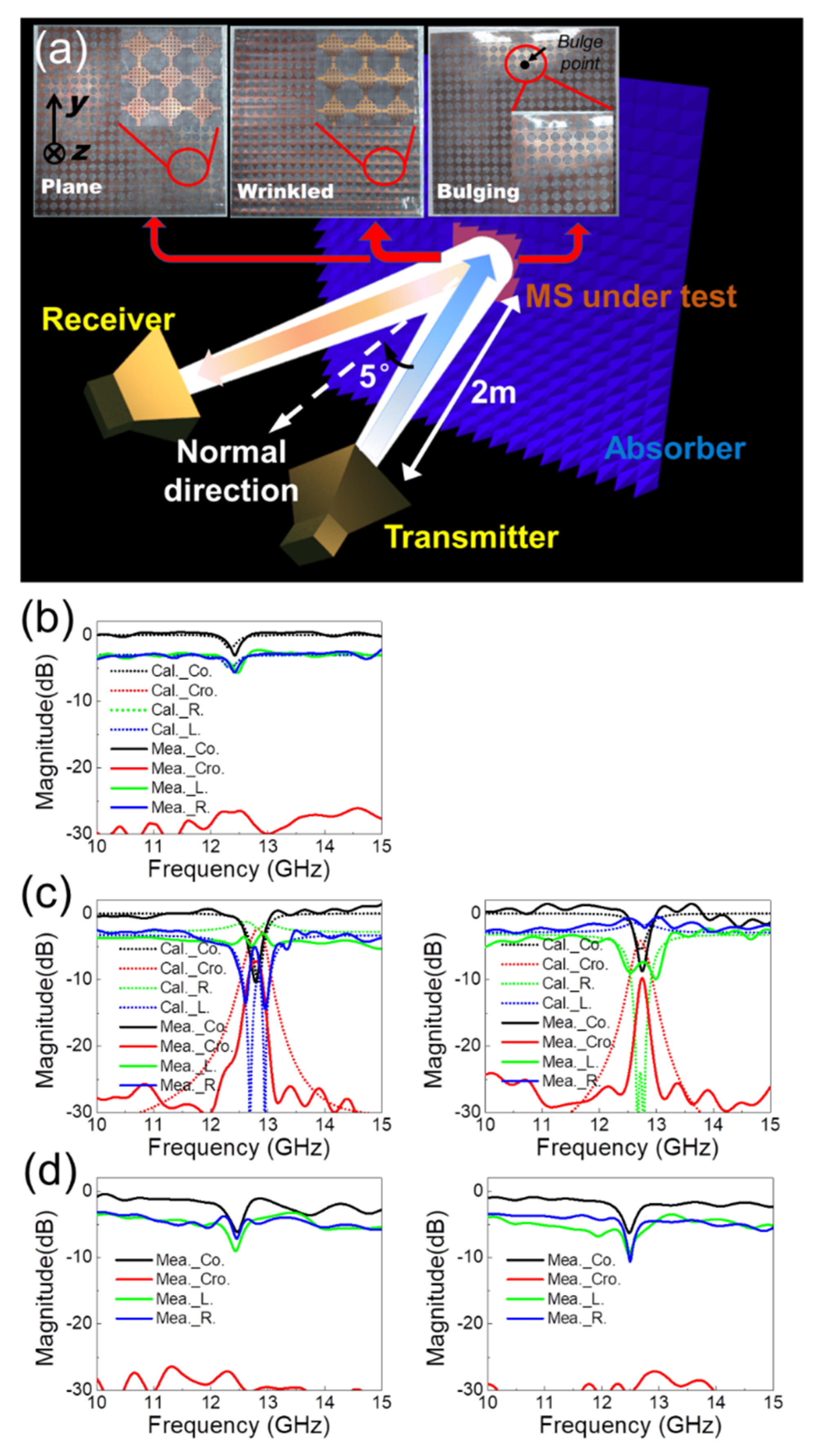
4. Fabrication and Measurements
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pendry, J.B. Negative refraction makes a perfect lens. Phys. Rev. Lett. 2000, 85, 3966. [Google Scholar] [CrossRef] [PubMed]
- Shalaev, V.M. Optical negative-index metamaterials. Nat. Photonics 2007, 1, 41. [Google Scholar] [CrossRef]
- Smith, D.R.; Pendry, J.B.; Wiltshire, M.C. Metamaterials and negative refractive index. Science 2004, 305, 788–792. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cai, W.; Chettiar, U.K.; Kildishev, A.V.; Shalaev, V.M. Optical cloaking with metamaterials. Nat. Photonics 2007, 1, 224. [Google Scholar] [CrossRef] [Green Version]
- Pendry, J.B.; Schurig, D.; Smith, D.R. Controlling electromagnetic fields. Science 2006, 312, 1780–1782. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schurig, D.; Mock, J.J.; Justice, B.; Cummer, S.A.; Pendry, J.B.; Starr, A.F.; Smith, D.R. Metamaterial electromagnetic cloak at microwave frequencies. Science 2006, 314, 977–980. [Google Scholar] [CrossRef] [Green Version]
- Landy, N.I.; Sajuyigbe, S.; Mock, J.J.; Smith, D.R.; Padilla, W.J. Perfect metamaterial absorber. Phys. Rev. Lett. 2008, 100, 207402. [Google Scholar] [CrossRef]
- Liu, N.; Mesch, M.; Weiss, T.; Hentschel, M.; Giessen, H. Infrared perfect absorber and its application as plasmonic sensor. Nano Lett. 2010, 10, 2342–2348. [Google Scholar] [CrossRef]
- Watts, C.M.; Liu, X.; Padilla, W.J. Metamaterial electromagnetic wave absorbers. Adv. Mater. 2012, 24, OP98–OP120. [Google Scholar] [CrossRef]
- Yu, N.; Genevet, P.; Kats, M.A.; Aieta, F.; Tetienne, J.-P.; Capasso, F.; Gaburro, Z. Light propagation with phase discontinuities: Generalized laws of reflection and refraction. Science 2011, 334, 333–337. [Google Scholar] [CrossRef] [Green Version]
- Kildishev, A.V.; Boltasseva, A.; Shalaev, V.M. Planar photonics with metasurfaces. Science 2013, 339, 1232009. [Google Scholar] [CrossRef] [Green Version]
- Lin, D.; Fan, P.; Hasman, E.; Brongersma, M.L. Dielectric gradient metasurface optical elements. Science 2014, 345, 298–302. [Google Scholar] [CrossRef]
- Yu, N.; Capasso, F. Flat optics with designer metasurfaces. Nat. Mater. 2014, 13, 139. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Liu, Z. Superlenses to overcome the diffraction limit. Nat. Mater. 2008, 7, 435. [Google Scholar] [CrossRef] [PubMed]
- Cai, B.G.; Li, Y.B.; Jiang, W.X.; Cheng, Q.; Cui, T.J. Generation of spatial Bessel beams using holographic metasurface. Opt. Exp. 2015, 23, 7593–7601. [Google Scholar] [CrossRef] [PubMed]
- Zheng, G.; Mühlenbernd, H.; Kenney, M.; Li, G.; Zentgraf, T.; Zhang, S. Metasurface holograms reaching 80% efficiency. Nat. Nanotechnol. 2015, 10, 308. [Google Scholar] [CrossRef]
- Khorasaninejad, M.; Chen, W.T.; Devlin, R.C.; Oh, J.; Zhu, A.Y.; Capasso, F. Metalenses at visible wavelengths: Diffraction-limited focusing and subwavelength resolution imaging. Science 2016, 352, 1190–1194. [Google Scholar] [CrossRef] [Green Version]
- Liu, T.; Yang, S.; Jiang, Z. Electromagnetic exploration of far-field super-focusing nanostructured metasurfaces. Opt. Exp. 2016, 24, 16297–16308. [Google Scholar] [CrossRef]
- Mollaei, M.S.M.; Simovski, C. Dual-metasurface superlens: A comprehensive study. Phys. Rev. B 2019, 100, 205426. [Google Scholar] [CrossRef] [Green Version]
- Arritt, B.; Smith, D.; Khraishi, T. Equivalent circuit analysis of metamaterial strain-dependent effective medium parameters. J. Appl. Phys. 2011, 109, 073512. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Shah, C.M.; Withayachumnankul, W.; Ung, B.S.-Y.; Mitchell, A.; Sriram, S.; Bhaskaran, M.; Chang, S.; Abbott, D. Flexible terahertz metamaterials for dual-axis strain sensing. Opt. Lett. 2013, 38, 2104–2106. [Google Scholar] [CrossRef] [PubMed]
- Lapine, M.; Powell, D.; Gorkunov, M.; Shadrivov, I.; Marqués, R.; Kivshar, Y. Structural tunability in metamaterials. Appl. Phys. Lett. 2009, 95, 084105. [Google Scholar] [CrossRef] [Green Version]
- Burrow, J.A.; Yahiaoui, R.; Sarangan, A.; Agha, I.; Mathews, J.; Searles, T.A. Polarization-dependent electromagnetic responses of ultrathin and highly flexible asymmetric terahertz metasurfaces. Opt. Exp. 2017, 25, 32540–32549. [Google Scholar] [CrossRef] [Green Version]
- Arritt, B.; Adomanis, B.; Khraishi, T.; Smith, D. Parametric analysis of the strain-dependent behavior of a metamaterial electric resonator. Appl. Phys. Lett. 2010, 97, 191907. [Google Scholar] [CrossRef] [Green Version]
- Melik, R.; Unal, E.; Perkgoz, N.K.; Puttlitz, C.; Demir, H.V. Metamaterial-based wireless strain sensors. Appl. Phys. Lett. 2009, 95, 011106. [Google Scholar] [CrossRef]
- Melik, R.; Unal, E.; Perkgoz, N.K.; Puttlitz, C.; Demir, H.V. Metamaterial based telemetric strain sensing in different materials. Opt. Exp. 2010, 18, 5000–5007. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zheng, L.; Sun, X.; Xu, H.; Lu, Y.; Lee, Y.; Rhee, J.Y.; Song, W. Strain sensitivity of electric-magnetic coupling in flexible terahertz metamaterials. Plasmonics 2015, 10, 1331–1335. [Google Scholar] [CrossRef]
- Everitt, H.O.; Tyler, T.; Caraway, B.D.; Bingham, C.M.; Llopis, A.; Heimbeck, M.S.; Padilla, W.J.; Smith, D.R.; Jokerst, N.M. Strain Sensing with Metamaterial Composites. Adv. Opt. Mater. 2019, 7, 1801397. [Google Scholar] [CrossRef]
- Lee, S.; Kim, S.; Kim, T.T.; Kim, Y.; Choi, M.; Lee, S.H.; Kim, J.Y.; Min, B. Reversibly stretchable and tunable terahertz metamaterials with wrinkled layouts. Adv. Mater. 2012, 24, 3491–3497. [Google Scholar] [CrossRef]
- Luo, S.; Zhao, J.; Zuo, D.; Wang, X. Perfect narrow band absorber for sensing applications. Opt. Exp. 2016, 24, 9288–9294. [Google Scholar] [CrossRef]
- Tedjini, S.; Karmakar, N.; Perret, E.; Vena, A.; Koswatta, R.; Rubayet, E. Hold the chips: Chipless technology, an alternative technique for RFID. IEEE Microw. Mag. 2013, 14, 56–65. [Google Scholar] [CrossRef]
- Amin, E.M.; Bhuiyan, M.S.; Karmakar, N.C.; Winther-Jensen, B. Development of a low cost printable chipless RFID humidity sensor. IEEE Sens. J. 2013, 14, 140–149. [Google Scholar] [CrossRef]
- Borgese, M.; Dicandia, F.A.; Costa, F.; Genovesi, S.; Manara, G. An inkjet printed chipless RFID sensor for wireless humidity monitoring. IEEE Sens. J. 2017, 17, 4699–4707. [Google Scholar] [CrossRef] [Green Version]
- Vena, A.; Perret, E.; Kaddour, D.; Baron, T. Techniques, Toward a reliable chipless RFID humidity sensor tag based on silicon nanowires. IEEE Trans. Microw. Theory Tech. 2016, 64, 2977–2985. [Google Scholar] [CrossRef]

© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Z.; Liu, R.; Cao, H.; Gong, H.; Du, M.; Li, S. Dual-Axis Metasurface Strain Sensor Based on Polarization–Phase-Deformation Relationship. Sensors 2020, 20, 1307. https://doi.org/10.3390/s20051307
Sun Z, Liu R, Cao H, Gong H, Du M, Li S. Dual-Axis Metasurface Strain Sensor Based on Polarization–Phase-Deformation Relationship. Sensors. 2020; 20(5):1307. https://doi.org/10.3390/s20051307
Chicago/Turabian StyleSun, Zhiwei, Run Liu, Hailin Cao, Heling Gong, Mingzhu Du, and Shirun Li. 2020. "Dual-Axis Metasurface Strain Sensor Based on Polarization–Phase-Deformation Relationship" Sensors 20, no. 5: 1307. https://doi.org/10.3390/s20051307