Extended Kalman Filter with Reduced Computational Demands for Systems with Non-Linear Measurement Models


Abstract
1. Introduction
2. Extended Kalman Filter
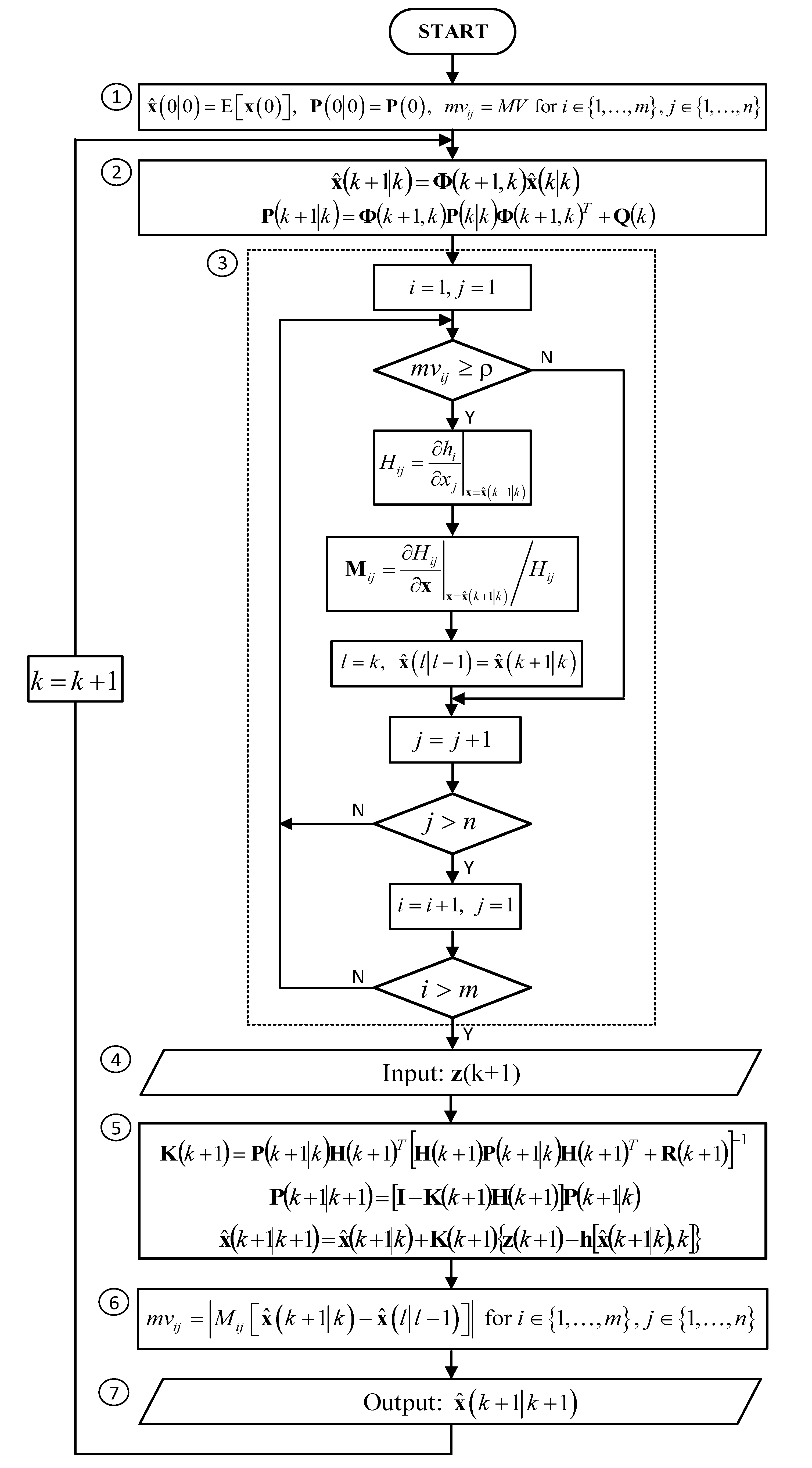
- Initialization of the estimated state vector and the covariance matrix of filtration errors ,
- Prediction of the state vector and calculation of the covariance matrix of prediction errors ,
- Calculation of the observation matrix which is a Jacobian of the non-linear measurement function h(*),
- Acquisition of a new measurement vector z,
- Calculation of the Kalman gains matrix and correction of the prediction results, i.e., calculation of the updated state vector and the covariance matrix of filtration errors ,
- Reporting of the state vector estimate ,
3. Extended Kalman Filter with Reduced Computational Demands
4. Examples of Application
4.1. Range-Only Tracking in 2D Radar
4.2. Angle-Only Tracking in 2D Radar
4.3. Tracking in 2D Radar with Range and Angle Measurements
5. Results of Algorithm Testing
5.1. Range-Only Tracking Radar Simulations
- Simulation time of 100 seconds,
- Period of measurements and filter date ,
- Radar coordinates , ,
- Object moving in the positive direction of the OX axis, with the initial position, velocity, and acceleration equal: , , , respectively,
- Power spectral density of the white noise of the motion disturbances ,
- Standard deviation of range measurements .
5.2. Angle-Only Tracking Radar Simulations
5.3. 2D Radar with Range and Angle Measurement Simulations
- Simulation time 100 s,
- Period of measurements and filter update ,
- Radar coordinates , ,
- Object moving from the initial position , , with the initial velocity , , and the initial acceleration ,
- Power spectral density of the white noise of the motion disturbances ,
- Standard deviation of range measurements ,
- Standard deviation of angle measurements .
6. Conclusions
Funding
Conflicts of Interest
References
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation Theory Algorithms and Software, 1st ed.; John Wiley & Sons: Hoboken, NJ, USA, 2001. [Google Scholar]
- Brown, R.G.; Hwang, P.Y.C. Introduction to Random Signals and Applied Kalman Filtering, 4th ed.; Wiley: Hoboken, NJ, USA, 2012. [Google Scholar]
- Matuszewski, J.; Dikta, A. Emitter Location Errors in Electronic Recognition System. In Proceedings of the XI Conference on Reconnaissance and Electronic Warfare Systems, Oltarzew, Poland, 21–23 November 2016; pp. C1–C8. [Google Scholar]
- Kaniewski, P.; Smagowski, P.; Konatowski, S. Ballistic Target Tracking with Use of Cinetheodolites. Int. J. Aerosp. Eng. 2019, 2019, 1–13. [Google Scholar] [CrossRef]
- Kayton, M.; Fried, W.R. Avionics Navigation Systems, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 1997. [Google Scholar]
- Gustafsson, F. Particle Filter Theory and Practice with Positioning Applications. IEEE Aerosp. Electron. Syst. Mag. 2010, 25, 53–82. [Google Scholar] [CrossRef]
- Konatowski, S.; Sosnowski, B. Accuracy Evaluation of The Estimation Process by Selected Non-linear Filters. Przeglad Elektrotechniczny 2011, 87, 101–106. [Google Scholar]
- Farrell, J.A. Aided Navigation GPS with High Rate Sensors, 1st ed.; McGraw-Hill: New York, NY, USA, 2008. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K. A New Extension of The Kalman Filter to Nonlinear Systems. In Proceedings of the Signal Processing, Sensor Fusion, and Target Recognition VI, Orlando, FL, USA, 21–25 April 1997; pp. 182–193. [Google Scholar]
- Ristic, B.; Arulampalam, S.; Gordon, N. Beyond the Kalman Filter: Particle Filters for Tracking Applications; Artech House Radar Library (Hardcover); Artech Print on Demand: Norwood, MA, USA, 2004. [Google Scholar]
- Doucet, A.; De Freitas, N.; Gordon, N. Sequential Monte Carlo Methods in Practice, 1st ed.; Information Science and Statistics; Springer: New York, NY, USA, 2001. [Google Scholar]
- Sun, X.; Medvedovic, M. Model Reduction and Parameter Estimation of Non-linear Dynamical Biochemical Reaction Networks. IET Syst. Biol. 2016, 10, 10–16. [Google Scholar] [CrossRef] [PubMed]
- Jorgensen, J.B.; Thomsen, P.G.; Madsen, H.; Kristensen, M.R. A Computationally Efficient and Robust Implementation of the Continuous-Discrete Extended Kalman Filter. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 11–13 July 2007; pp. 3706–3712. [Google Scholar]
- Raitoharju, M.; Piche, R. On Computational Complexity Reduction Methods for Kalman Filter Extensions. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 2–19. [Google Scholar] [CrossRef]
- Valade, A.; Acco, P.; Grabolosa, P.; Fourniols, J.-Y. A Study about Kalman Filters Applied to Embedded Sensors. Sensors 2017, 17, 2810. [Google Scholar] [CrossRef] [PubMed]
- Tang, X.; Falco, G.; Falletti, E. Complexity Reduction of the Kalman Filter-based Tracking Loops in GNSS Receivers. GPS Solut. 2017, 21, 685–699. [Google Scholar] [CrossRef]
- Minkler, G.; Minkler, J. Theory and Application of Kalman Filtering; Magellan Book Company: Palm Bay, FL, USA, 1993. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Threshold | Average Number of Updates | RMS Position Error [m] |
|---|---|---|
| 0 | 100 | 6.045 |
| 0.01 | 32.20 | 6.054 |
| 0.02 | 25.96 | 6.063 |
| 0.03 | 22.00 | 6.053 |
| 0.04 | 19.00 | 6.042 |
| 0.05 | 17.71 | 6.013 |
| 0.06 | 11.04 | 6.195 |
| 0.07 | 7.998 | 8.265 |
| 0.08 | 4.977 | 383.9 |
| 0.09 | 3.039 | 2115 |
| 0.1 | 2.467 | 2530 |
| Threshold | Average Number of Updates | RMS Position Error [m] |
|---|---|---|
| 0 | 100 | 1.877 |
| 0.01 | 31.00 | 1.887 |
| 0.02 | 26.00 | 1.886 |
| 0.03 | 22.00 | 1.887 |
| 0.04 | 19.00 | 1.885 |
| 0.05 | 16.00 | 1.895 |
| 0.06 | 11.00 | 2.041 |
| 0.07 | 8.00 | 3.214 |
| 0.08 | 5.00 | 10.32 |
| Threshold | Average Number of Updates | RMS Position Error [m] |
|---|---|---|
| 0 | 100 | 57.89 |
| 0.01 | 38.97 | 57.89 |
| 0.02 | 30.44 | 57.88 |
| 0.03 | 25.49 | 57.92 |
| 0.04 | 21.52 | 57.81 |
| 0.05 | 17.12 | 57.39 |
| 0.06 | 11.72 | 58.83 |
| 0.07 | 6.963 | 1822 |
| 0.08 | 3.461 | 3151 |
| Threshold | Standard EKF | Modified EKF |
|---|---|---|
| 0 | 8.29 | 12.3 |
| 0.01 | 8.29 | 4.62 |
| 0.02 | 8.29 | 3.91 |
| 0.03 | 8.29 | 3.46 |
| 0.04 | 8.29 | 3.11 |
| 0.05 | 8.29 | 2.97 |
| 0.06 | 8.29 | 2.21 |
| 0.07 | 8.29 | 1.86 |
| 0.08 | 8.29 | 1.52 |
| 0.09 | 8.29 | 1.30 |
| 0.1 | 8.29 | 1.23 |
| Threshold | Average Number of Updates | RMS Position Error [m] |
|---|---|---|
| 0 | 100 | 8.894 |
| 0.02 | 49.89 | 8.909 |
| 0.04 | 46.24 | 8.911 |
| 0.06 | 39.03 | 8.907 |
| 0.08 | 35.02 | 8.886 |
| 0.1 | 28.68 | 8.893 |
| 0.15 | 21.28 | 8.830 |
| 0.20 | 18.07 | 8.889 |
| Threshold | Standard EKF | Modified EKF |
|---|---|---|
| 0 | 2.02 | 3.65 |
| 0.02 | 2.02 | 2.30 |
| 0.04 | 2.02 | 2.20 |
| 0.06 | 2.02 | 2.00 |
| 0.08 | 2.02 | 1.90 |
| 0.1 | 2.02 | 1.72 |
| 0.15 | 2.02 | 1.52 |
| 0.20 | 2.02 | 1.44 |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kaniewski, P. Extended Kalman Filter with Reduced Computational Demands for Systems with Non-Linear Measurement Models. Sensors 2020, 20, 1584. https://doi.org/10.3390/s20061584
Kaniewski P. Extended Kalman Filter with Reduced Computational Demands for Systems with Non-Linear Measurement Models. Sensors. 2020; 20(6):1584. https://doi.org/10.3390/s20061584
Chicago/Turabian StyleKaniewski, Piotr. 2020. "Extended Kalman Filter with Reduced Computational Demands for Systems with Non-Linear Measurement Models" Sensors 20, no. 6: 1584. https://doi.org/10.3390/s20061584
APA StyleKaniewski, P. (2020). Extended Kalman Filter with Reduced Computational Demands for Systems with Non-Linear Measurement Models. Sensors, 20(6), 1584. https://doi.org/10.3390/s20061584