A Flexible Autonomous Robotic Observatory Infrastructure for Bentho-Pelagic Monitoring †

 ,
, 
 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
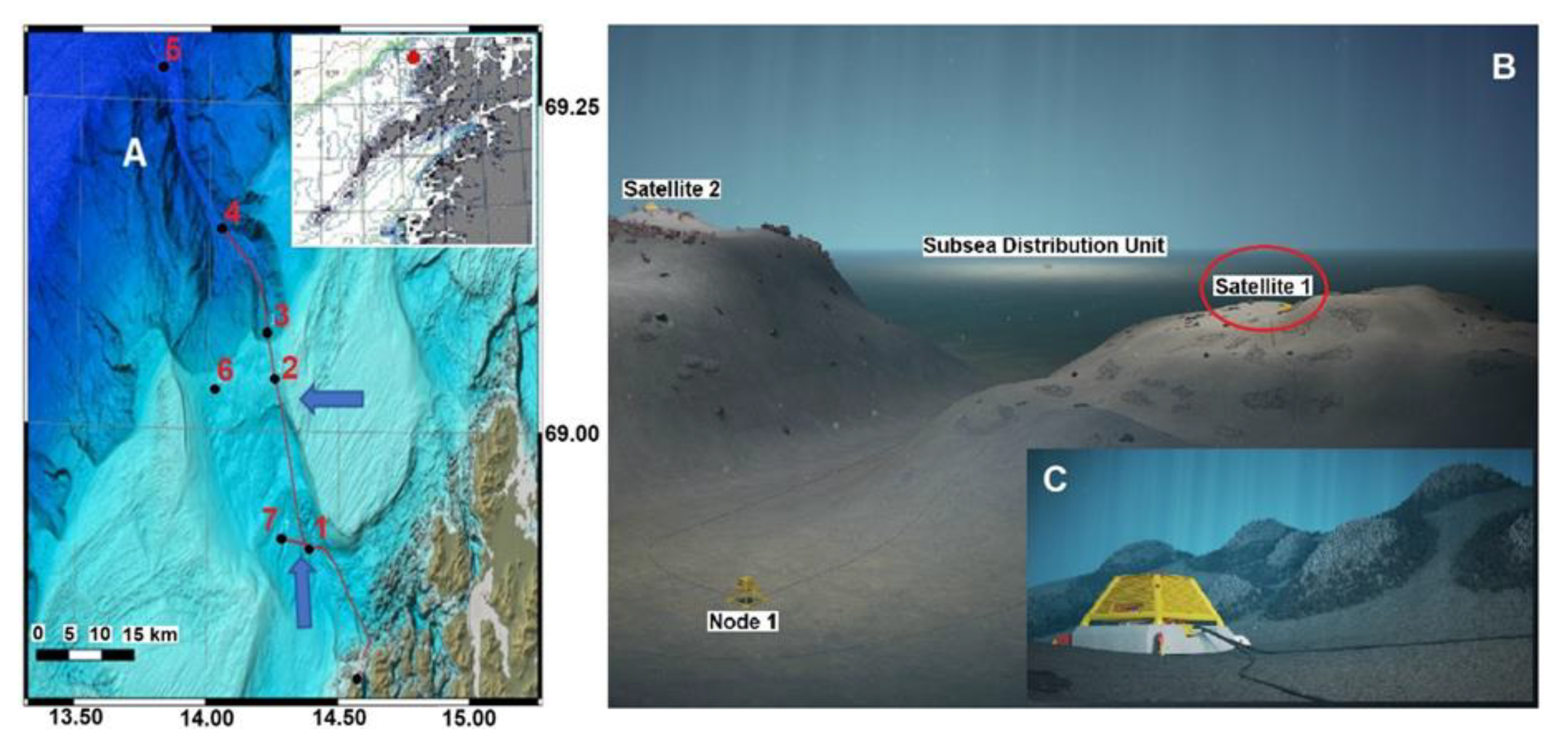
2.1. The Hosting Infrastructure and the Development Area
- Collaboration between science and industry creates substantial research and development (R&D) gains;
- No research or industry organization alone holds the competence and knowledge needed to develop usable robotic tools for sustainable management of the marine environment and its resources;
- Multidisciplinary and multi-nationality cooperation fosters new ideas and solutions that are applicable to an extended market of industrial maritime users. In the future, ecological monitoring will be requested from these industries to demonstrate the sustainability of their activity.
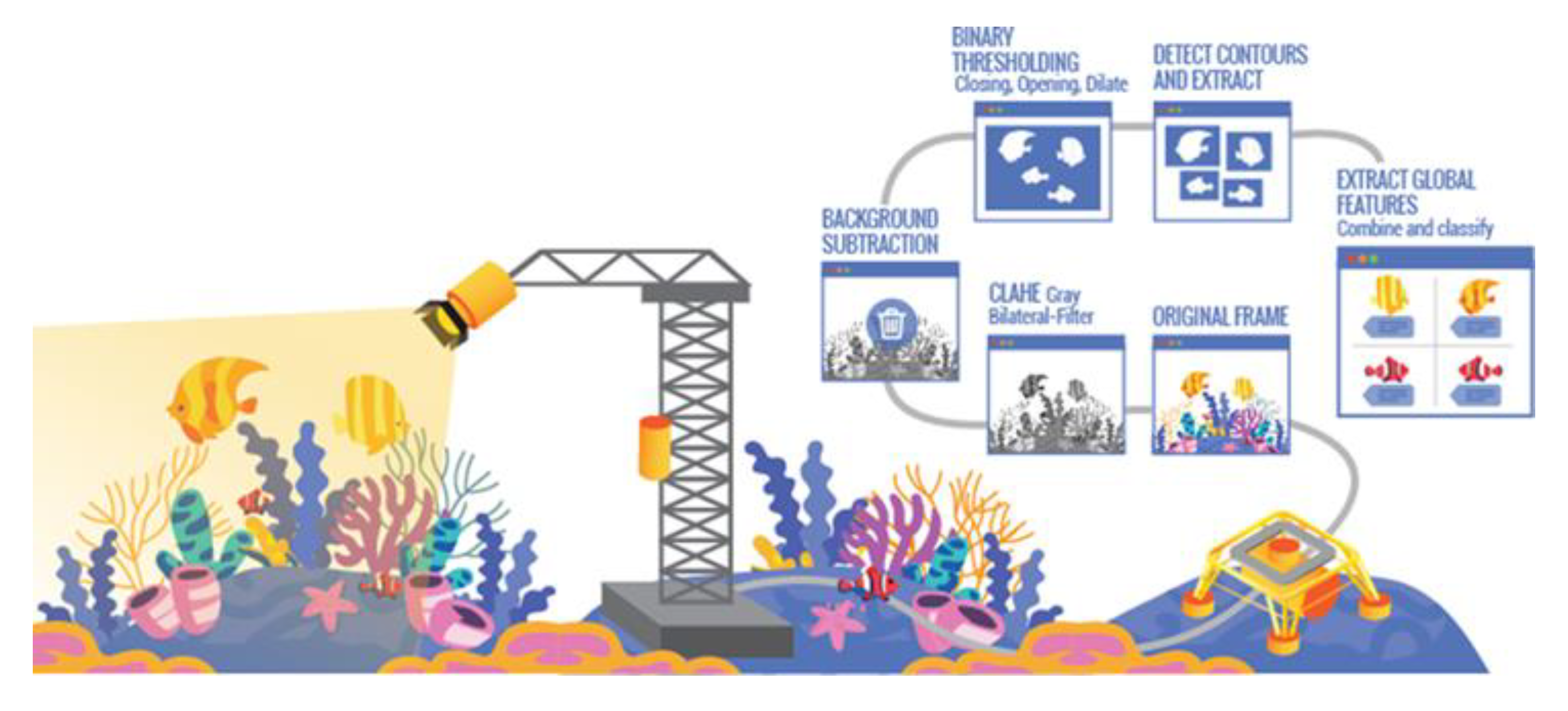
2.2. AI Developments for Image Processing
- Create a docking interface for ROV free maintenance with an intelligent mobile seafloor monitoring system (crawler; [22] to provide independence from an infrastructure cable;
- Drastically increase the operational area and capability of the crawler by using an extended fiber-optic cable and thus provide the option to operate without umbilical;
- Construct a deep-sea fuel cell to provide energy for long-term self-sustained operations;
- Improve observation capacities using state-of-the-art active acoustics and 3D camera technologies;
- Implement routines for automatic organism classification and tracking and integrate this information with the crawler sensor data;
- Improve integration of hardware/software components to provide an efficient user interface;
- Demonstrate performance and develop training facilities for new users and markets.
2.3. The Targeted Ecosystem Functioning Components and Monitoring Approach
3. Results: Progress of System Assembly and Data Production
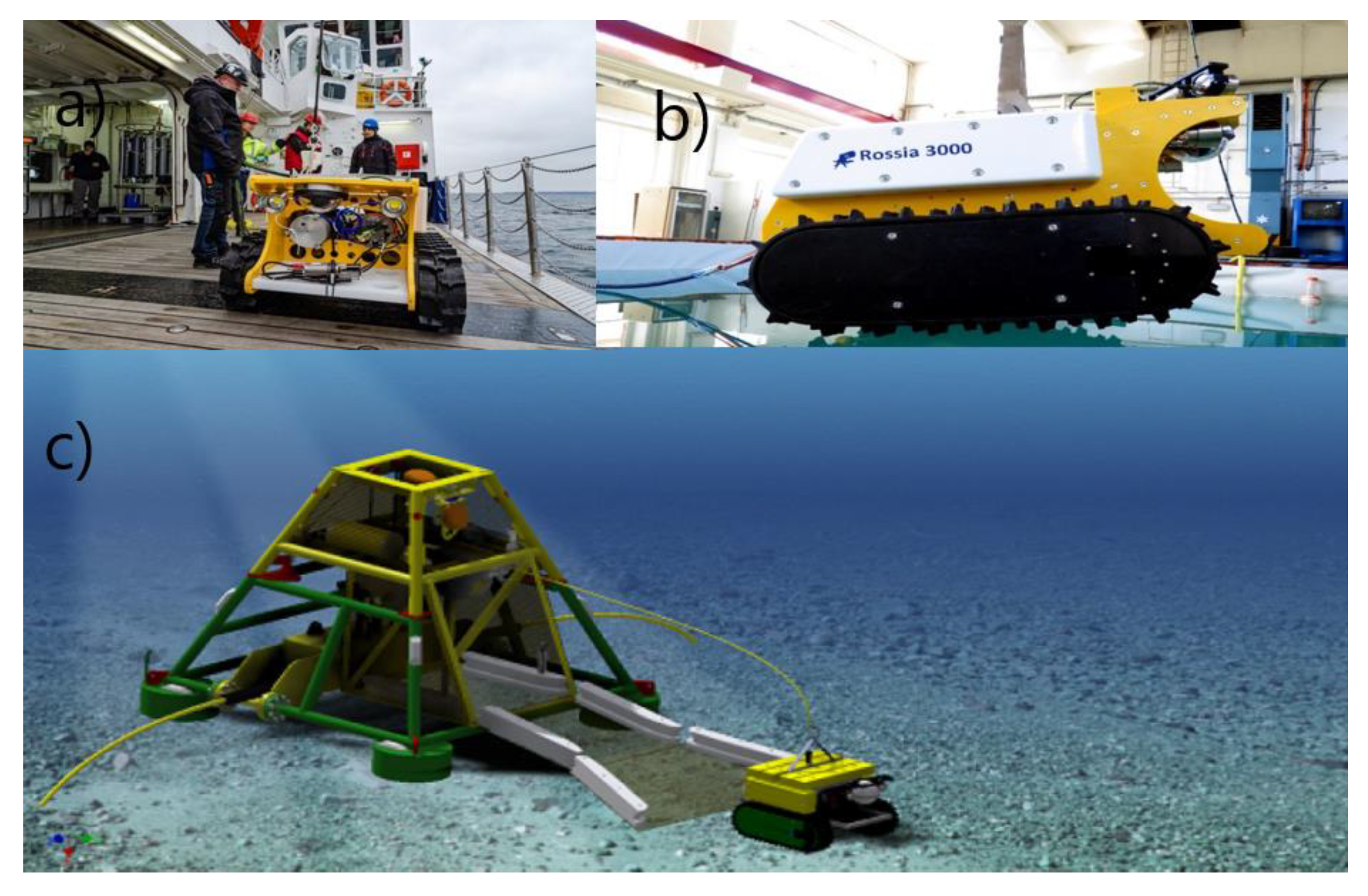
3.1. The Crawler System
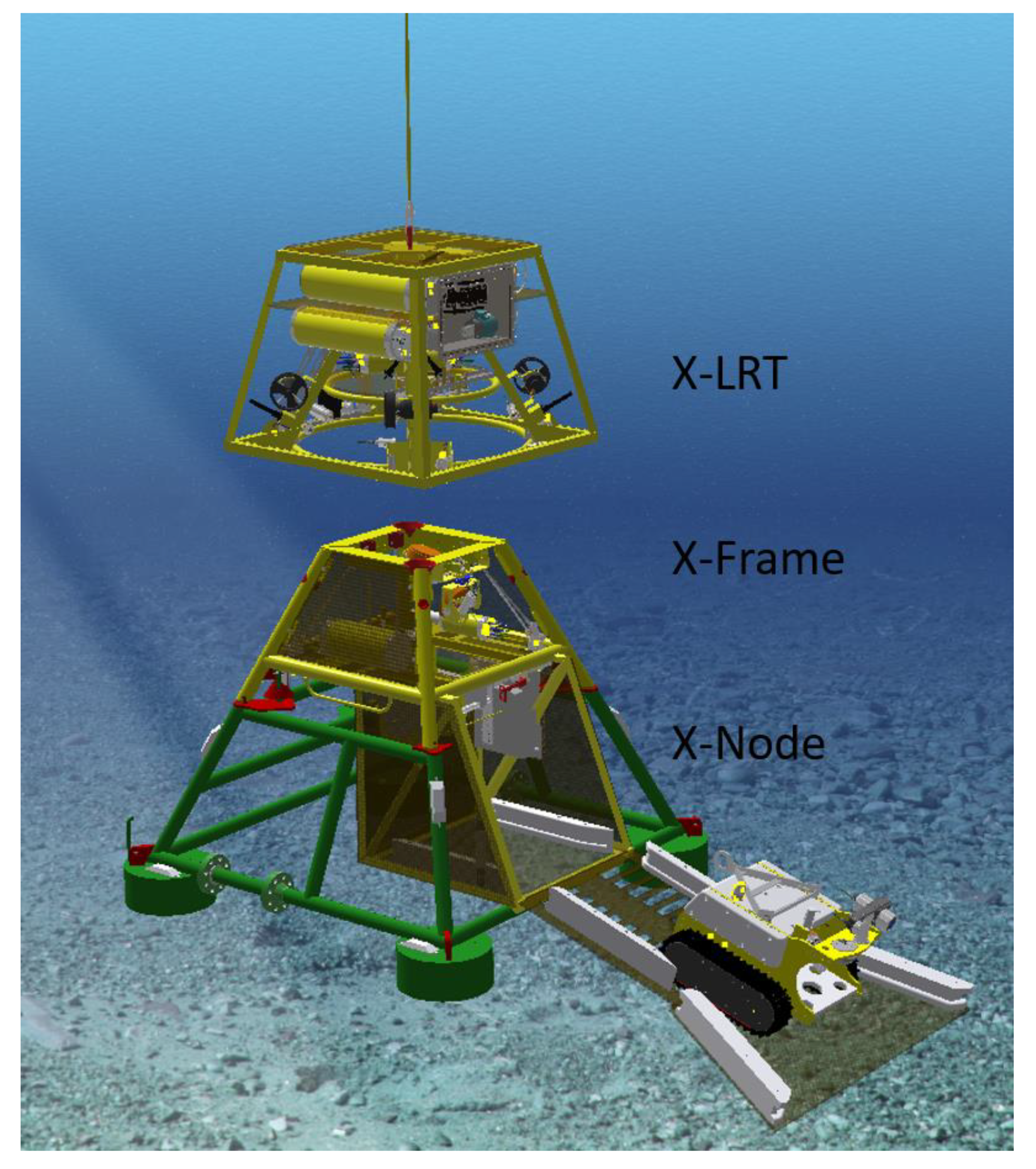
3.2. The Bottom-Based System
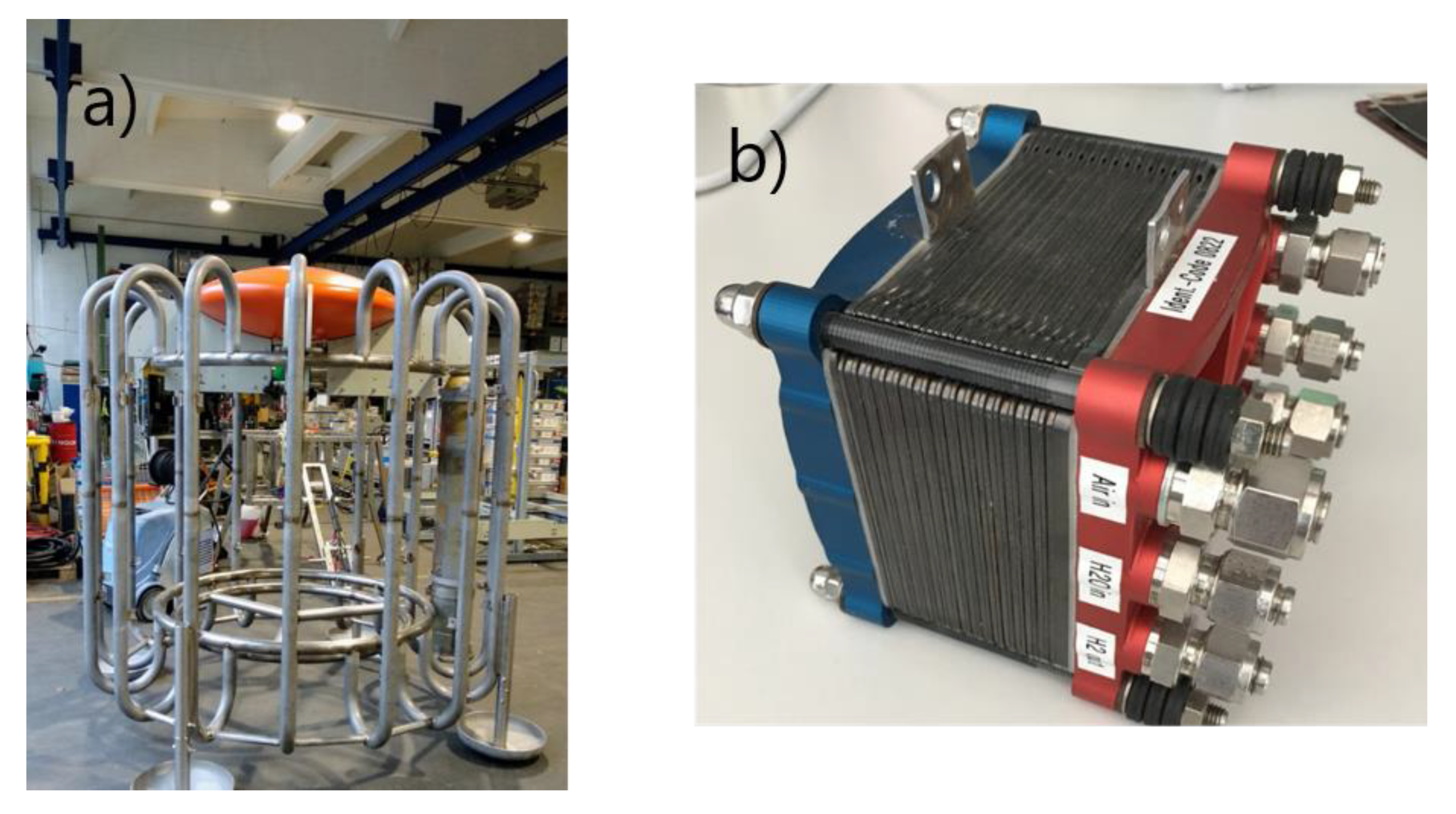
3.3. Self-Sustained Operation with Fuel Cells
3.4. Navigation and Piloting
- The core element for autonomy is the simultaneous localization and mapping (SLAM) navigation algorithm, that creates the 2.5D bathymetry on the fly, using the SeaVision laser scanner plus the same map to localize itself (see Section 3.5);
- A flexible mission execution layer based on Behavior Tree (BT) [33], that provides the functionality to act in response to events (e.g., payload sensor data) during the mission instead of following a fixed waypoint plan.
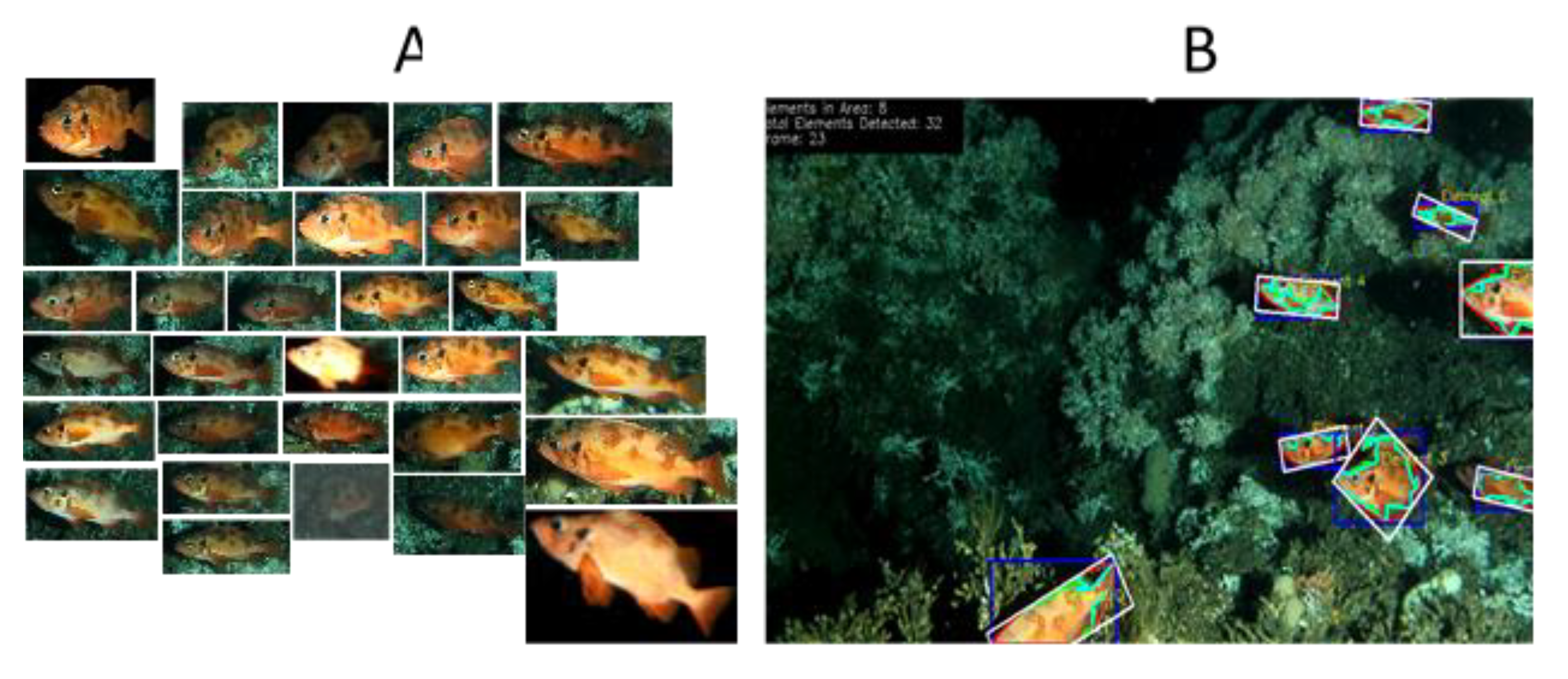
3.5. Automatic Data Acquisition and Processing for Ecosystem Functioning
4. Discussion
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Danovaro, R.; Aguzzi, J.; Fanelli, E.; Billet, D.; Gjerde, K.; Jamieson, A.; Ramirez-Llodra, E.; Smith, C.R.; Snelgrove, P.V.R.; Thomsen, L.; et al. A new international ecosystem-based strategy for the global deep ocean. Science 2017, 355, 452–454. [Google Scholar] [CrossRef]
- Del Río, J.; Toma, D.M.; Martínez, E.; O’Reilly, T.C.; Delory, E.; Pearlman, J.S.; Waldmann, C.; Jirka, S. A Sensor Web Architecture for integrating smart oceanographic sensors into the semantic sensor Web. IEEE J. Ocean. Eng. 2018, 43, 830–842. [Google Scholar] [CrossRef] [Green Version]
- Buck, J.J.; Bainbridge, S.J.; Burger, E.F.; Kraberg, A.; Casari, M.; Darroch, L.; Del Rio Fernandes, J.; Metfies, K.; Delroy, E.; Fischer, P.; et al. Ocean data product integration through innovation-The next level of data interoperability. Front. Mar. Sci. 2019, 6, 32/1–32/19. [Google Scholar] [CrossRef] [Green Version]
- Aguzzi, J.; Chatzievangelou, D.; Marini, S.; Fanelli, E.; Danovaro, R.; Flögel, S.; Lebris, N.; Juanes, F.; De Leo, F.; Del Rio, J.; et al. New high-tech interactive and flexible networks for the future monitoring of deep-sea ecosystems. Environ. Sci. Technol. 2020, 53, 6616–6631. [Google Scholar] [CrossRef] [Green Version]
- Danovaro, R.; Fanelli, E.; Aguzzi, J.; Billett, D.; Carugati, L.; Corinaldesi, C.; Dell’Anno, A.; Gjerde, K.; Jamieson, A.J.; Kark, S.; et al. Ecological indicators for an integrated global deep-ocean strategy. Nat. Ecol. Evol. 2020, 4, 181–192. [Google Scholar] [CrossRef]
- Rountree, R.; Aguzzi, J.; Marini, S.; Fanelli, E.; De Leo, C.F.; Del Rio, J.; Juanes, F. Towards an optimal design for ecosystem-level ocean observatories. Ocean. Mar. Biol. Ann. Rev. 2020, 50, 58. (In Press) [Google Scholar]
- Godø, O.R.; Handegard, N.O.; Browman, H.; Macaulay, G.J.; Kaartvedt, S.; Giske, J.; Ona, E.; Huse, G.; Johnsen, E. Marine ecosystem acoustics(MEA): Quantifying processes in the sea at the spatio-temporal scales on which they occur. ICES J. Mar. Sci. 2014, 71, 2357–2369. [Google Scholar] [CrossRef] [Green Version]
- Godø, O.R.; Torkelsen, T.; Johnsen, S. The LoVe Ocean Observatory in Operation. Mar. Technol. Soc. J. 2014, 48, 24–29. [Google Scholar] [CrossRef]
- Aguzzi, J.; Sbragaglia, V.; Santamaría, G.; Del Río, J.; Sardà, F.; Nogueras, M.; Manuel, A. Daily activity rhythms in temperate coastal fishes: Insights from cabled observatory video monitoring. Mar. Ecol. Prog. Ser. 2013, 486, 223–236. [Google Scholar] [CrossRef] [Green Version]
- Aguzzi, J.; Doya, C.; Tecchio, S.; De Leo, F.L.; Azzurro, E.; Costa, C.; Sbragaglia, V.; Del Río, J.; Navarro, J.; Ruhl, H.A.; et al. Coastal observatories for monitoring of fish behaviour and their responses to environmental changes. Rev. Fish Biol. Fish. 2015, 25, 463–483. [Google Scholar] [CrossRef] [Green Version]
- Roberts, J.M.; Wheeler, A.J.; Freiwald, A. Reefs of the Deep: The biology and geology of Cold-Water Coral Ecosystems. Science 2006, 312, 543–547. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Godø, O.R.; Tenningen, E.; Ostrowski, M.; Kubilus, R.; Kutti, T.; Korneliussen, R.; Fosså, J.H. The Hermes Lander Project—The technology, the data, and an evaluation of concept and results. Fisken Og Havet 2012, 3, 1–65. [Google Scholar]
- The Lofoten Vesterålen Ocean Observatrory website. Available online: https://love.equinor.com/ (accessed on 12 March 2020).
- Metas AS website. Available online: https://metas.no/portfolio/x-net-system/ (accessed on 12 March 2020).
- Bøe, R.; Bellec, V.K.; Dolan, M.F.J.; Buhl-Mortensen, P.; Buhl-Mortensen, L.; Slagstad, D.; Rise, L. Giant sandwaves in the Hola glacial trough off Vesterålen, North Norway. Mar. Geol. 2009, 267, 36–54. [Google Scholar] [CrossRef]
- Woods, M.; Shaw, A.; Tidey, E.; Van Pham, B.; Simon, L.; Mukherji, R.; Maddison, B. Seeker—Autonomous Long-range Rover. Navigation for Remote Exploration. J. Field Robot. 2014, 31, 940–968. [Google Scholar] [CrossRef] [Green Version]
- Aguzzi, J.; Flexas, M.M.; Flögel, S.; Lo Iacono, C.; Tangherlini, M.; Costa, C.; Marini, S.; Bahamon, N.; Martini, S.; Fanelli, E.; et al. Exo-ocean exploration with deep-sea sensor and platform technologies. Astrobiology 2020, 20. (In Press) [Google Scholar] [CrossRef] [Green Version]
- Thomsen, L.; Purser, A.; Schwendner, J.; Duda, A.; Flögel, S.; Kwasnitschka, T.; Pfannkuche, O.; Wilde, D.; Rosta, R. Temporal and spatial benthic data collection via mobile robots: Present and future applications. In Proceedings of the OCEANS-Genova, Genova, Italy, 18–21 May 2015; pp. 1–5. [Google Scholar]
- Matabos, M.; Bui, A.O.; Mihály, S.; Aguzzi, J.; Juniper, D.S.K.; Ajayamohan, R.S. High-frequency study of benthic megafaunal community dynamics in Barkley canyon: A multidisciplinary approach using the NEPTUNE Canada network. J. Mar. Syst. 2014, 130, 56–68. [Google Scholar] [CrossRef]
- Marini, S.; Fanelli, E.; Sbragaglia, V.; Azzurro, E.; Del Rio, J.; Aguzzi, J. Tracking fish abundance by underwater image recognition. Sci. Rep. 2018, 8, 13748. [Google Scholar] [CrossRef] [Green Version]
- Aguzzi, J.; Company, J.B.; Costa, C.; Matabos, M.; Azzurro, E.; Mànuel, A.; Menesatti, P.; Sardà, F.; Canals, M.; Delory, E.; et al. Challenges to assessment of benthic populations and biodiversity as a result of rhythmic behaviour: Video solutions from cabled observatories. Oceanogr. Mar. Biol. Annu. Rev. 2012, 50, 235–286. [Google Scholar]
- iSeaMC website. Available online: https://www.iseamc.com/crawler-systems/advanced-crawler-systems/ (accessed on 12 March 2020).
- Bahamon, N.J.; Bernardello, R.; Ahumada, M.-A.; Puigdefabregas, J.; Muñoz, E.; Velásquez, Z.; Cruzado, A. The new pelagic Operational Observatory of the Catalan Sea (OOCS) for the multisensor coordinated measurement of atmospheric and oceanographic conditions. Sensors 2011, 11, 11251–11272. [Google Scholar] [CrossRef] [Green Version]
- Hays, G.C.; Ferreira, L.C.; Sequeira, A.M.; Meekan, M.G.; Duarte, C.M.; Bailey, H.; Eguíluz, V.M. Key questions in marine megafauna movement ecology. Trends Ecol. Evol. 2016, 31, 463–475. [Google Scholar] [CrossRef] [Green Version]
- Irigoien, X.; Klevjer, T.A.; Røstad, A.; Martinez, U.; Boyra, G.; Acuña, J.L.; Agusti, S. Large mesopelagic fishes biomass and trophic efficiency in the open ocean. Nature 2014, 5, 3271. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Purser, A.; Thomsen, L.; Barnes, C.; Best, M.; Chapman, R.; Hofbauer, M.; Wagner, H. Temporal and spatial benthic data collection via an internet operated Deep Sea Crawler. Methods Oceanogr. 2013, 5, 1–18. [Google Scholar] [CrossRef]
- The Ocean Network website. Available online: https://www.oceannetworks.ca/introduction-barkley-canyon (accessed on 12 March 2020).
- Doya, C.; Chatzievangelou, D.; Bahamon, N.; Purser, A.; De Leo, F.; Juniper, K.; Thomsen, L.; Aguzzi, J. Seasonal monitoring of deep-sea cold-seep benthic communities using an Internet Operated Vehicle (IOV). PLoS ONE 2017, 12, e0176917. [Google Scholar] [CrossRef]
- Chatzievangelou, D.; Suarez, A.; Aguzzi, J.; Bigham, K.; Thomsen, L. Optimization of surveys with Internet Operated Deep-sea Crawlers, as an integrated tool for ocean cabled observatories: Monitoring the benthic community of a methane hydrates site in Barkley Canyon (BC, Canada). In Proceedings of the AGU Fall Meeting, New Olrleans, LA, USA, 11–15 December 2017. [Google Scholar]
- Chatzievangelou, D.; Doya, C.; Mihály, S.; Sastri, A.R.; Thomsen, L.; Aguzzi, J. High-frequency patterns in the abundance of benthic species near a cold-seep: An Internet Operated Vehicle application. PLoS ONE 2016, 11, e0163808. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chatzievangelou, D.; Aguzzi, J.; Thomsen, L. Quality control and pre analysis treatment of 5-year long environmental datasets collected by an Internet Operated Deep sea Crawler. In Proceedings of the 2019 IMEKO TC-19 International Workshop on Metrology for the Sea (METROSea), Genoa, Italy, 3–5 October 2019. [Google Scholar]
- Thomsen, L.; Aguzzi, J.; Costa, C.; De Leo, F.; Ogston, A.; Purser, A. The oceanic biological pump: Rapid carbon transfer to the Deep Sea during winter. Sci. Rep. 2017, 7, 10763. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Colledanchise, M.; Ögren, P. Behavior Trees in Robotics and AI: An Introduction; Artificial Intelligence and Robotics Series; Chapman & Hall/CRC: London, UK, 2018; 192p, ISBN 9781138593732. [Google Scholar]
- Carrio, J.H. Adaptive Localization and Mapping for Planetary Rovers. Ph.D. Thesis, University of Bremen, Bremen, Germany, 2018. Available online: https://elib.suub.uni-bremen.de/edocs/00106623-1.pdf (accessed on 12 March 2020).
- Behavior Tree website. Available online: https://www.behaviortree.dev/ (accessed on 12 March 2020).
- Simmonds, J.; MacLennan, D. Fisheries acoustics: Theory and practice. In Fish and Aquatic Resources; Blackwell Science: London/Oxford, UK, 2005. [Google Scholar]
- Buhl-Mortensen, P.; Tenningen, E.; Tysseland, A.B.S. Effects of water flow and drilling waste exposure on polyp behaviour in Lophelia pertusa. Mar. Biol. Res. 2015, 11, 725–737. [Google Scholar] [CrossRef]
- Aguzzi, J.; Costa, C.; Robert, K.; Matabos, M.; Antonucci, F.; Juniper, K.; Menesatti, P. Automated image analysis for the detection of benthic crustaceans and bacterial mat coverage using the VENUS undersea cabled network. Sensors 2011, 11, 10534–10556. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nattkemper, T.; Osterloff, J.; Nilssen, I.; Van Engeland, T.; Buhl-Mortensen, P.; Järnegren, J. Computer vision enables short- and long-term analysis of Lophelia pertusa polyp behaviour and colour from an underwater observatory. Sci. Rep. 2019, 9, 6578. [Google Scholar] [CrossRef]
- Lopez-Vazquez, V.; Lopez-Guede, J.M.; Marini, S.; Fanelli, E.; Johnsen, E.; Aguzzi, J. Video Image Enhancement and Machine Learning Pipeline for Underwater Animal Detection and Classification at Cabled Observatories. Sensors 2020, 20, 726. [Google Scholar] [CrossRef] [Green Version]
- UN. General Assembly of the United Nations. Seventy-Second Session. Agenda Item 77 (a). Oceans and the Law of the Sea. Resolution A/72/L.18. 2017. Available online: https://undocs.org/en/A/72/L.18 (accessed on 12 March 2020).
- IOC. Intergovernmental Oceanographic Commission, Decision IOC-XXIX/2 Prov; IOC: Paris, France, 2017. [Google Scholar]
- Engeland, T.; Godø, O.R.; Johnsen, E.; Duineveld, G.C.A.; van Oevelen, D. Cabled ocean observatory data reveal food supply mechanisms to a cold-water coral reef. Prog. Oceanogr. 2019, 172, 51–64. [Google Scholar] [CrossRef] [Green Version]
- Aguzzi, J.; Company, J.B.; Costa, C.; Menesatti, P.; Garcia, J.A.; Bahamon, N.; Puig, P.; Sardà, F. Activity rhythms in the deep-sea: A chronobiological approach. Front. Biosci.-Landmark 2011, 16, 131–150. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Aguzzi, J.; Fanelli, E.; Ciuffardi, T.; Schirone, A.; Craig, G.; The NEMO Consortium. Inertial bioluminescence rhythms at the Central Mediterranean KM3NeT deep-sea neutrino telescope. Sci. Rep. 2017, 7, 44938. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Forrest, A.L.; Trembanis, A.C.; Todd, W.L. Ocean floor mapping as precursor for space exploration. J. Ocean Technol. 2012, 7, 70–86. [Google Scholar]
- Trembanis, A.C.; Forrest, A.L.; Miller, D.C.; Lim, D.S.; Darlene, S.S.; Gernhardt, M.L.; Todd, W.L. Multiplatform ocean exploration: Insights from the NEEMO space analog mission. Mar. Technol. Soc. J. 2012, 46, 7–19. [Google Scholar] [CrossRef]
- Howe, A. Cassette Factories and Robotic Bricks: A Roadmap for Establishing Deep Space Infrastructures. SAE Tech. Pap. 2005, 114, 330–353. [Google Scholar] [CrossRef]
- Pedersen, L.; Smith, T.; Lee, S.Y.; Cabrol, N. Planetary LakeLander: A robotic sentinel to monitor remote lakes. J. Field Robot. 2016, 32, 860–879. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors | Type/Model | Crawler | X-Frame |
|---|---|---|---|
| Current profiler long range (m/s and °) | Acoustic current meter/Nortek Signature 250 | X | |
| Current profiler short range (m/s and °) | Acoustic current meter/Nortek Aquadop | X | X |
| Pressure (dbar) | Xylem AADI 4117D * | * | |
| Temperature (°C) | Xylem AADI 4117D * | * | |
| Salinity (°/oo) | Xylem AADI 4319A * | * | |
| CTD (°C, dBar, °/oo) | ADM CTD | X | |
| Oxygen (µmol/L)) | AADI optode 4531 | X | |
| Turbidity (FTU) | Seapoint turbidity meter | X | * |
| Chlorophyll (μg/L) | Seapoint fluorometer | X | |
| High-definition (HD) imaging | X | ||
| Operational cameras | 3 Metas web-cameras (1 UWC-960, 2 UWC-210) | X | |
| Acoustic imaging | Simrad WBT-mini with ES-70 CD and ES-200 CD transducers | X | |
| Ambient noise | Ocean Sonics SB-35 ETH | X | |
| Laser Scanning | Kraken SeaVision® | X |
| Element | Status | Challenges | Expected Completion | Comment |
|---|---|---|---|---|
| Crawler system | Tested at shallow water | Garage–crawler symbiosis and cable operation | First test mid-2020 | Similar crawlers have been produced and given valuable experience for the completion of the ARIM crawler. |
| The bottom-based system | Platform tested at LoVe and at a commercial oil production site | Integrating garage with charging and cable winch for the crawler. Combine these functions and X-Frame as a sensor carrier | First field tests with complete system mid-2020 | The optical fibre cable on the winch is used for training the navigation software prior to full autonomy operations |
| Self-sustained fuel cell | Design and laboratory version completed. Construction of frame and recovery system finished | Integration of fuel cell within the ARIM system. Establish operational routines | First field tests with complete system mid-2020 | This module is presently an add-on to the ARIM platform. We expect a full integration in the future |
| Navigation and piloting | Mainly laboratory test. First field test in shallow water in 2019 | Deep water operation in unknown location | Tests under realistic operational conditions mid-2020 | This software will be under continuous development based on experience and on development in a fast-developing software field |
| Automatic data acquisition and processing | Large amount of data from LoVe used to train the system. All routines are operated according to specifications | Evaluation of system capacity in handle changing visibility and routines capability to work at different habitat conditions | Tests under realistic operational conditions mid-2020 | Changing habitat conditions like light and turbidity affect visibility. This is a general challenge in marine imaging that requires attention. The complete processing pipeline as well as the associated problems and future challenges is detailed in [40] |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aguzzi, J.; Albiez, J.; Flögel, S.; Godø, O.R.; Grimsbø, E.; Marini, S.; Pfannkuche, O.; Rodriguez, E.; Thomsen, L.; Torkelsen, T.; et al. A Flexible Autonomous Robotic Observatory Infrastructure for Bentho-Pelagic Monitoring. Sensors 2020, 20, 1614. https://doi.org/10.3390/s20061614
Aguzzi J, Albiez J, Flögel S, Godø OR, Grimsbø E, Marini S, Pfannkuche O, Rodriguez E, Thomsen L, Torkelsen T, et al. A Flexible Autonomous Robotic Observatory Infrastructure for Bentho-Pelagic Monitoring. Sensors. 2020; 20(6):1614. https://doi.org/10.3390/s20061614
Chicago/Turabian StyleAguzzi, Jacopo, Jan Albiez, Sascha Flögel, Olav Rune Godø, Endre Grimsbø, Simone Marini, Olaf Pfannkuche, Erik Rodriguez, Laurenz Thomsen, Terje Torkelsen, and et al. 2020. "A Flexible Autonomous Robotic Observatory Infrastructure for Bentho-Pelagic Monitoring" Sensors 20, no. 6: 1614. https://doi.org/10.3390/s20061614
APA StyleAguzzi, J., Albiez, J., Flögel, S., Godø, O. R., Grimsbø, E., Marini, S., Pfannkuche, O., Rodriguez, E., Thomsen, L., Torkelsen, T., Valencia, J., López-Vázquez, V., Wehde, H., & Zhang, G. (2020). A Flexible Autonomous Robotic Observatory Infrastructure for Bentho-Pelagic Monitoring. Sensors, 20(6), 1614. https://doi.org/10.3390/s20061614