Research on a Simulation Method of the Millimeter Wave Radar Virtual Test Environment for Intelligent Driving


Abstract
:1. Introduction
2. Analysis of Environmental Clutter Mechanism
2.1. Analysis of Ground Clutter
2.2. Analysis of Weather Clutter
3. Modeling of Environmental Clutter
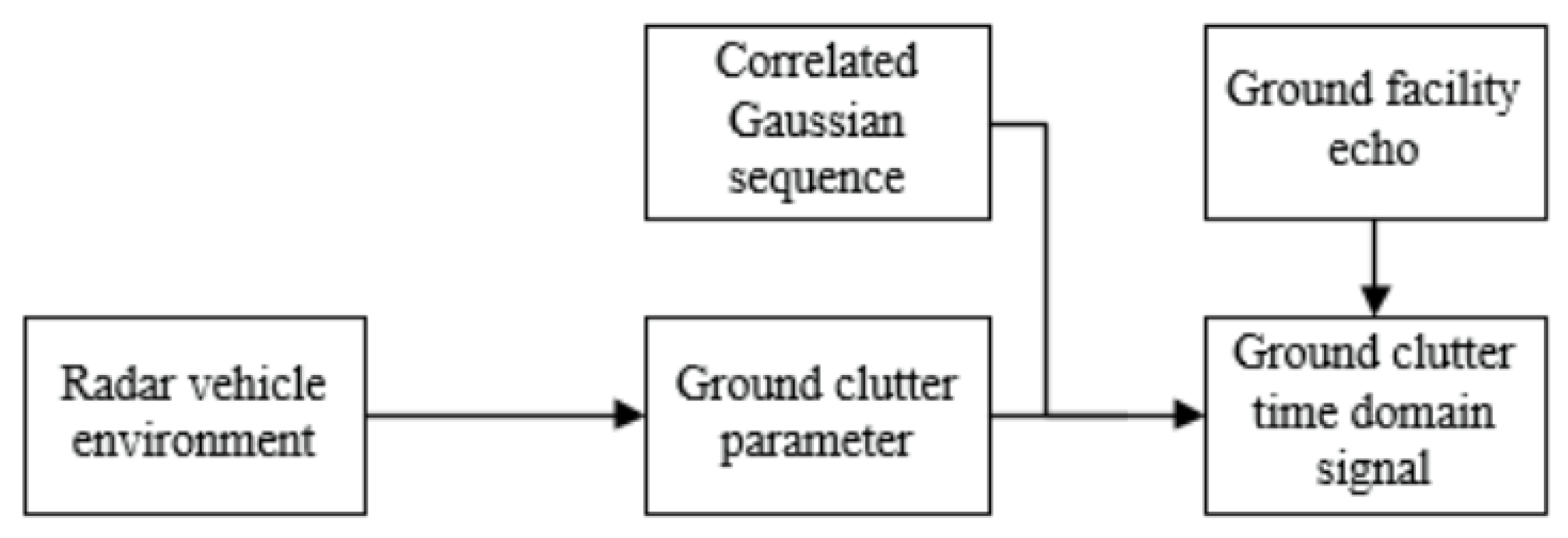
3.1. Modeling of Ground Clutter
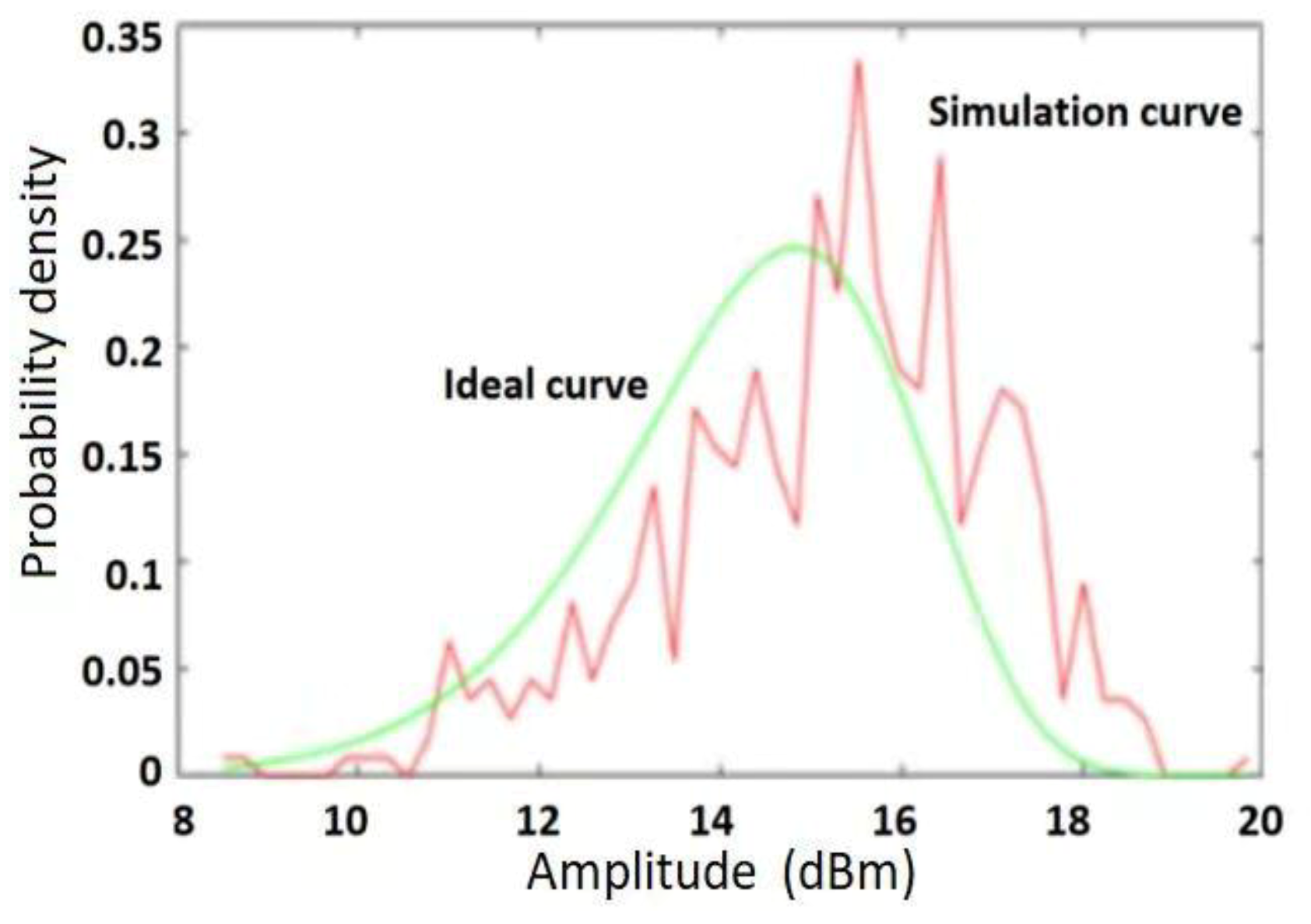
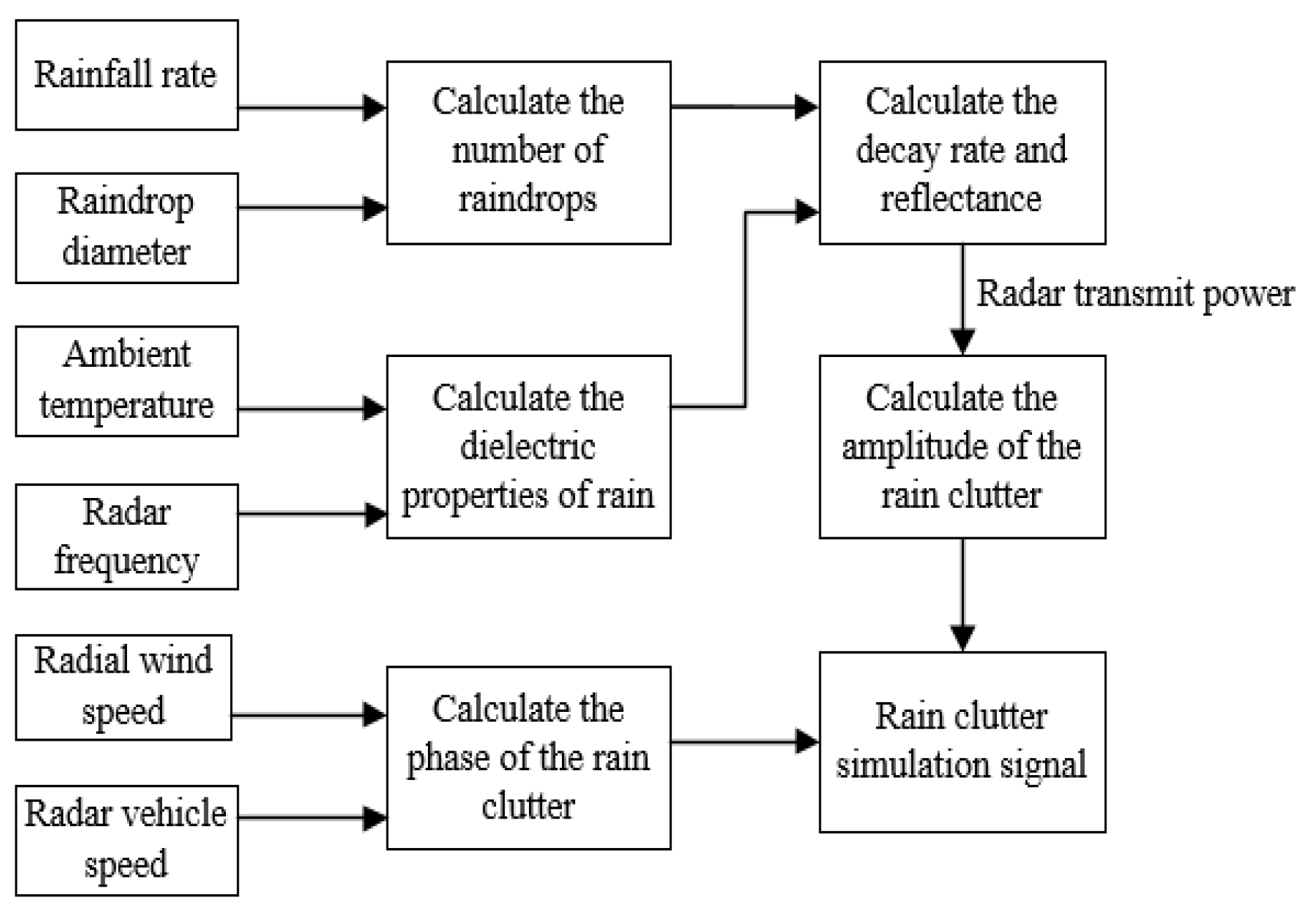
3.2. Modeling of Weather Clutter
4. Simulation Application of Environmental Clutter
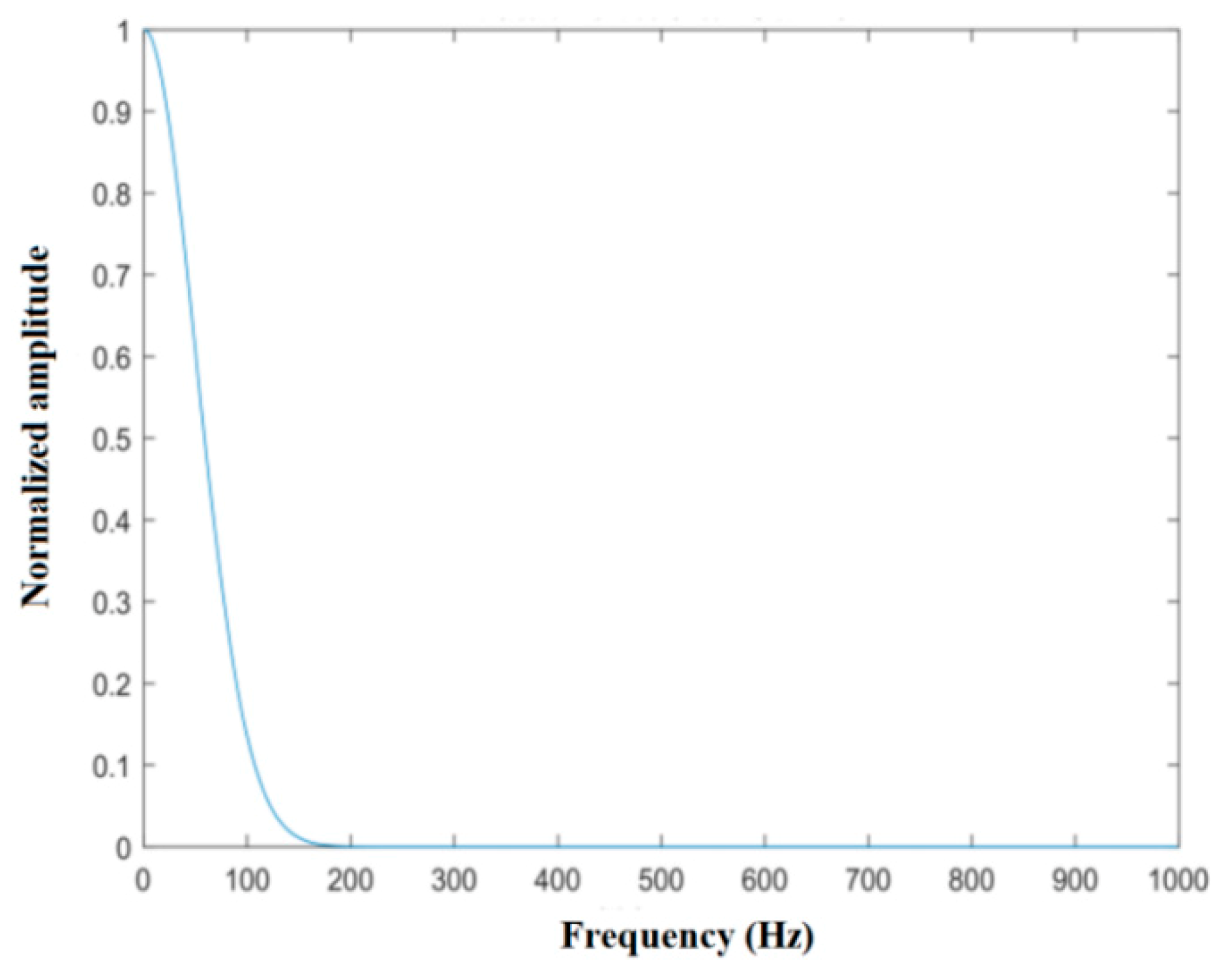
4.1. Simulation Application of Ground Debris Wave
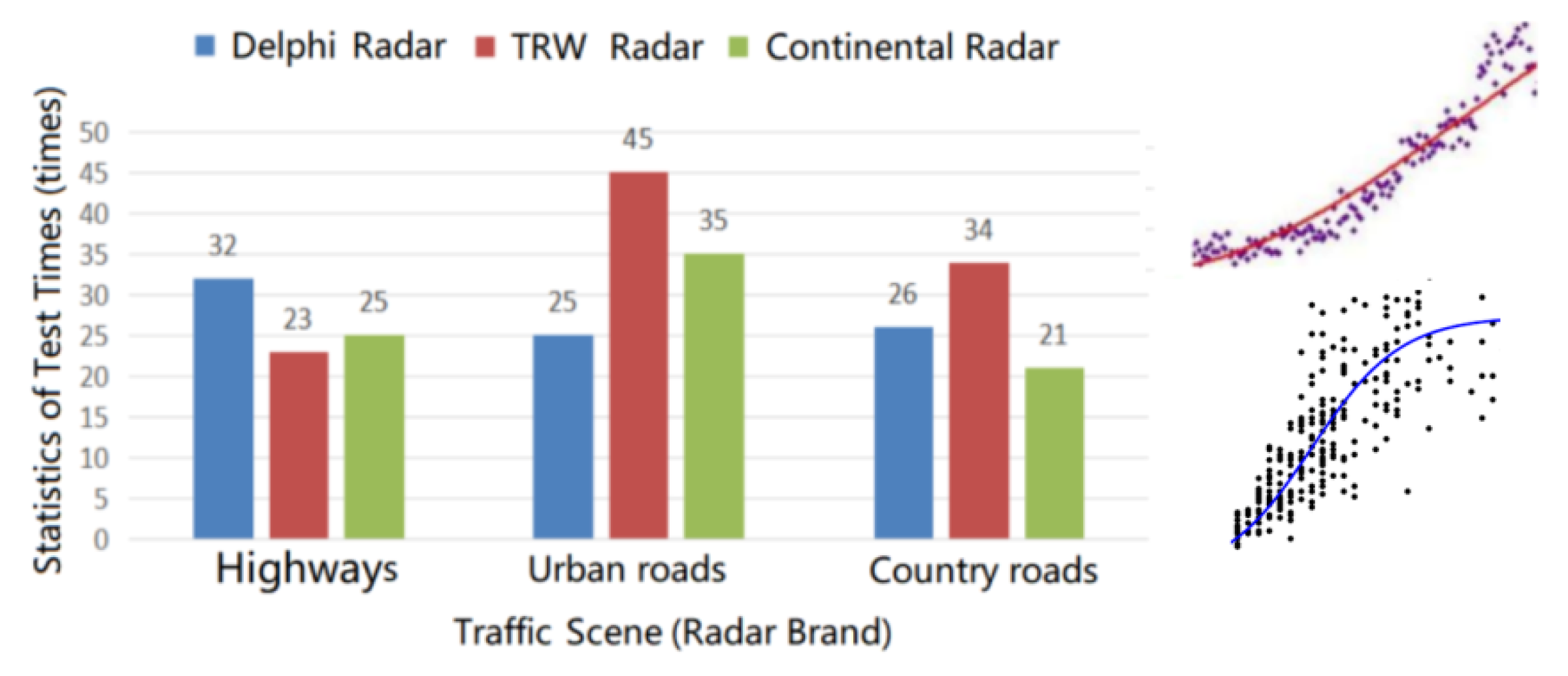
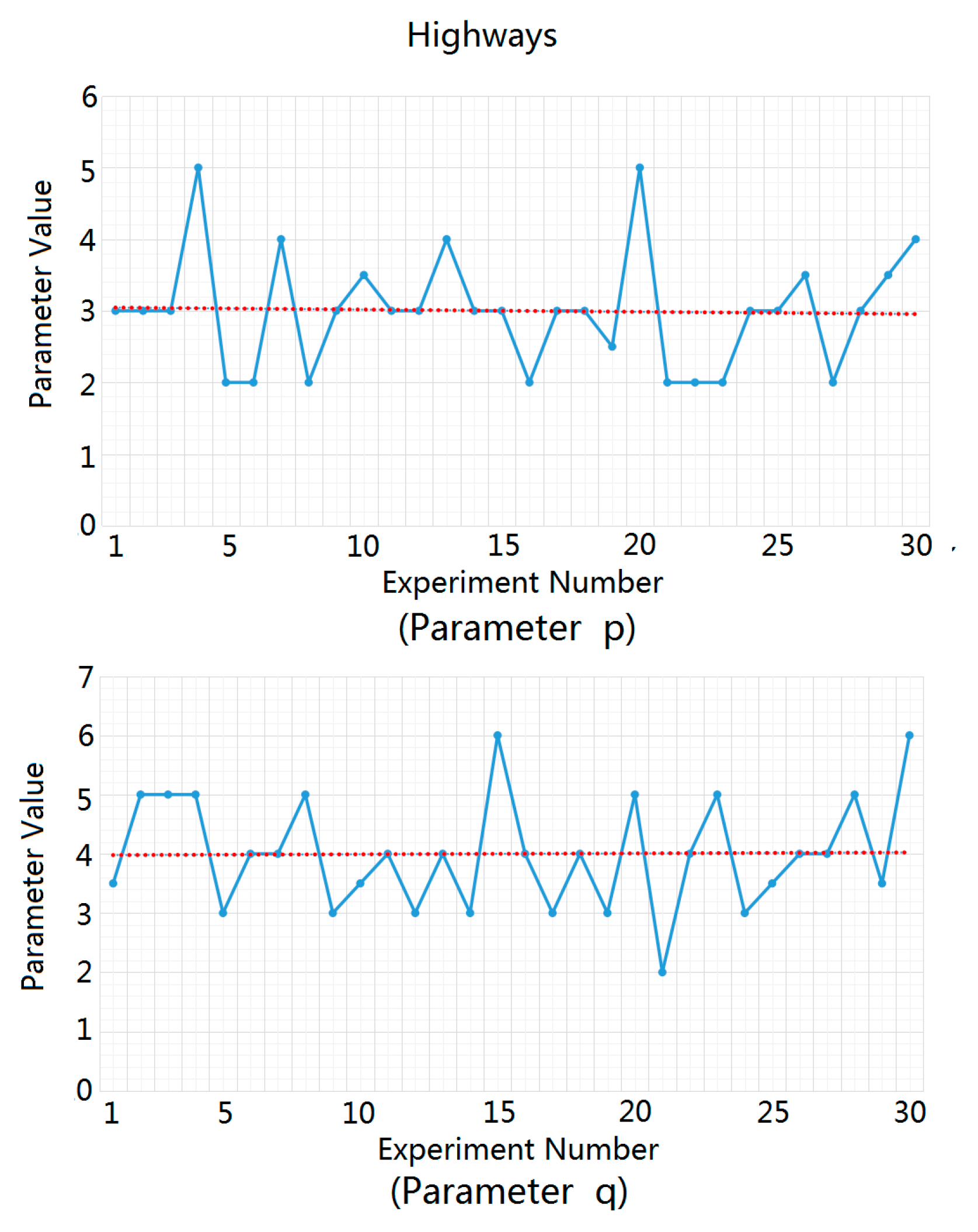
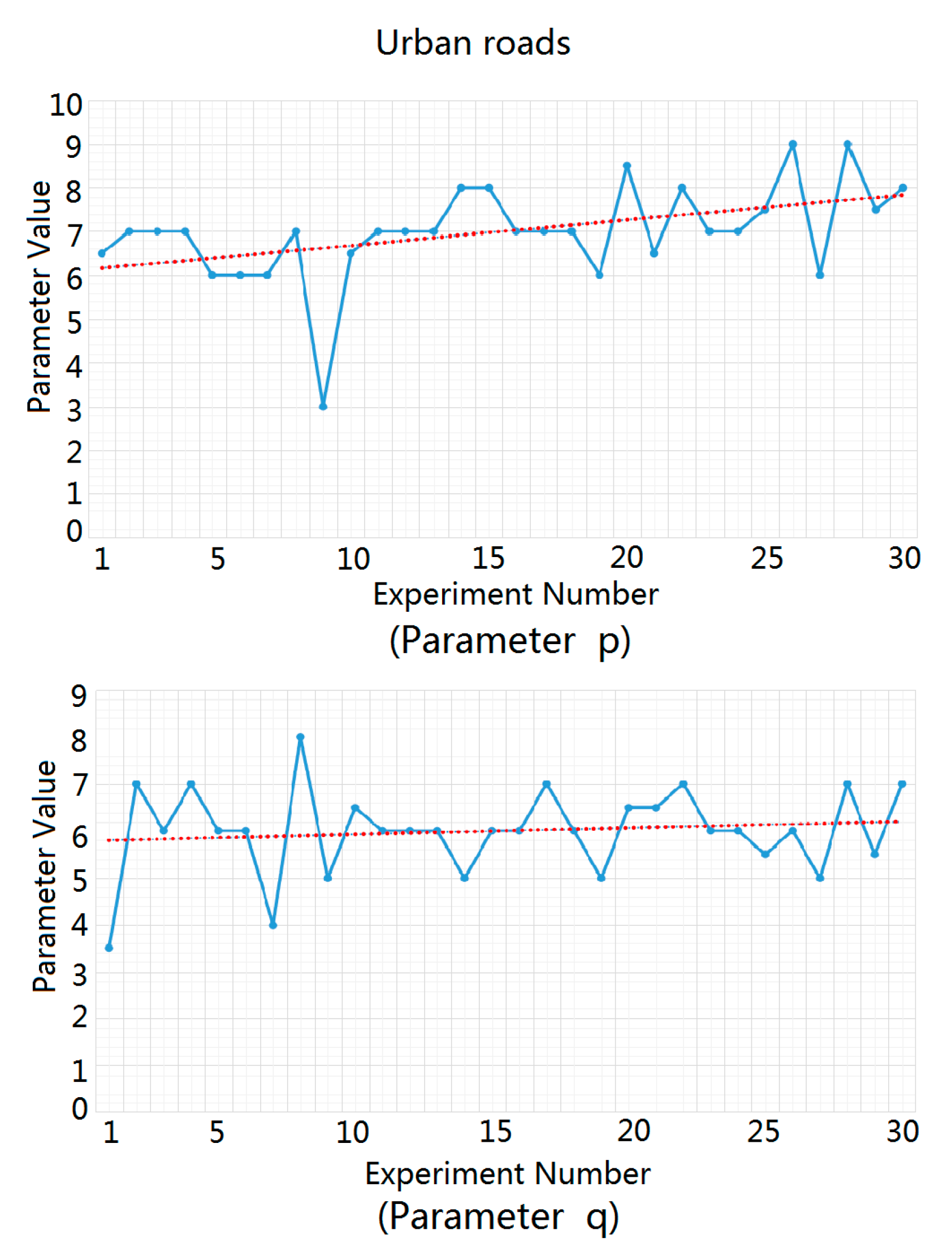
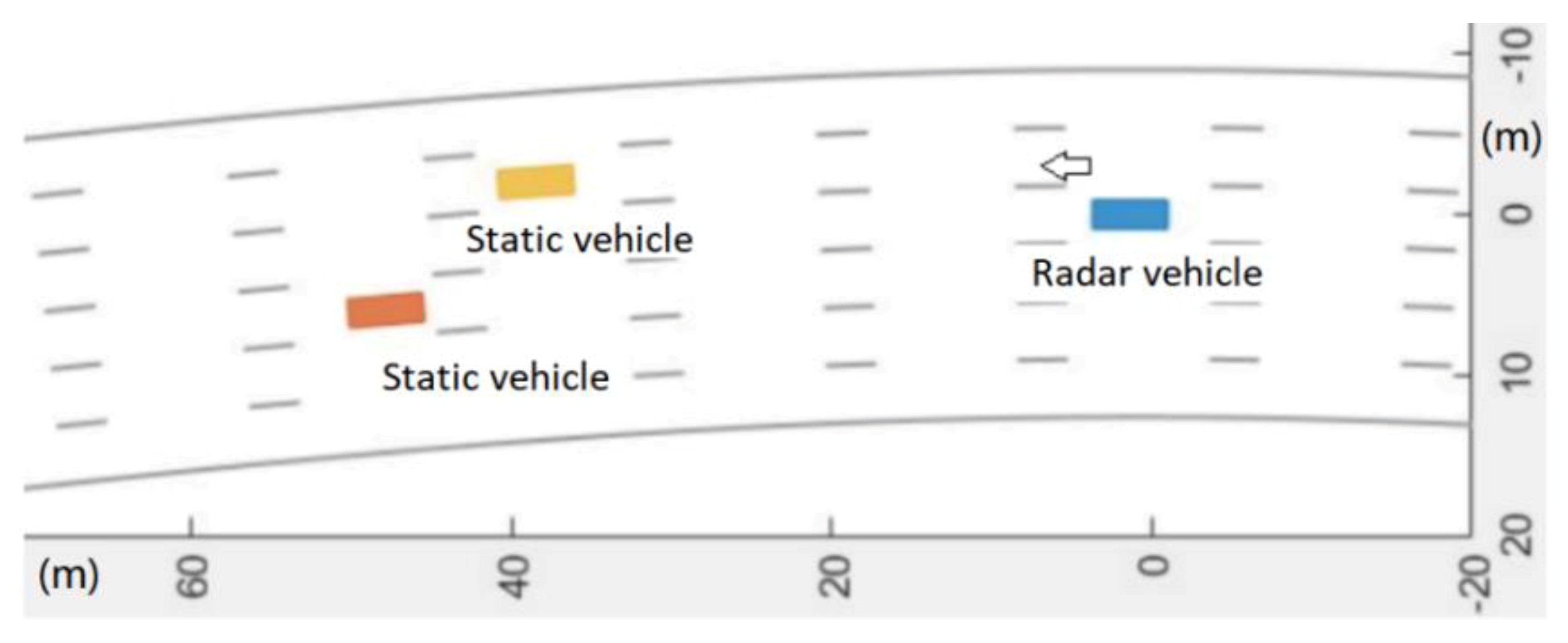
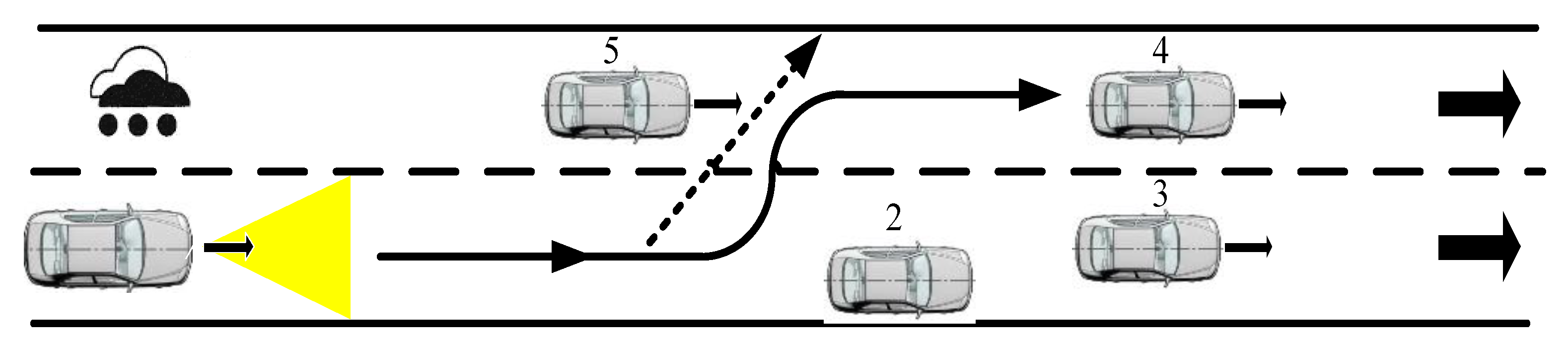
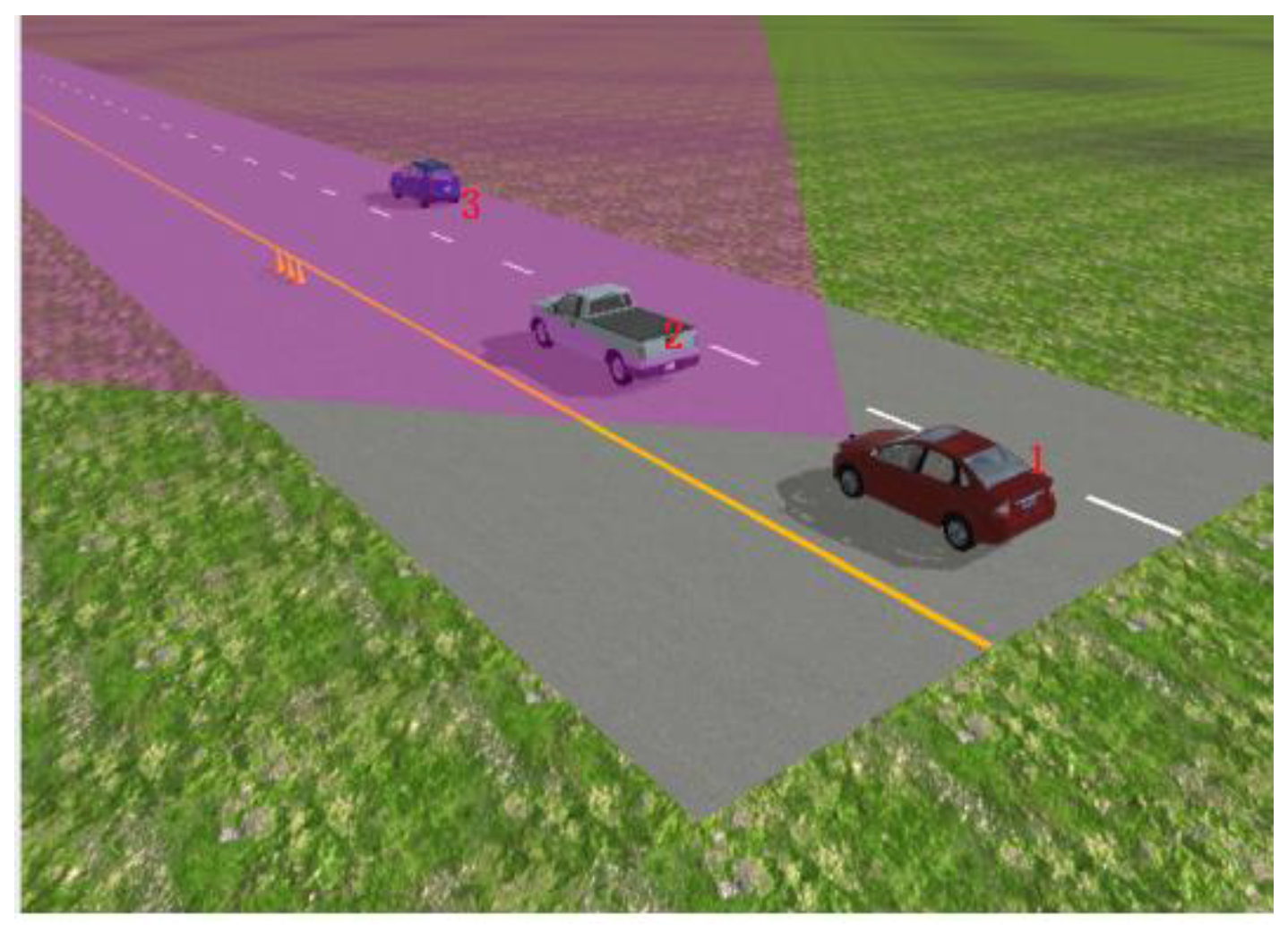
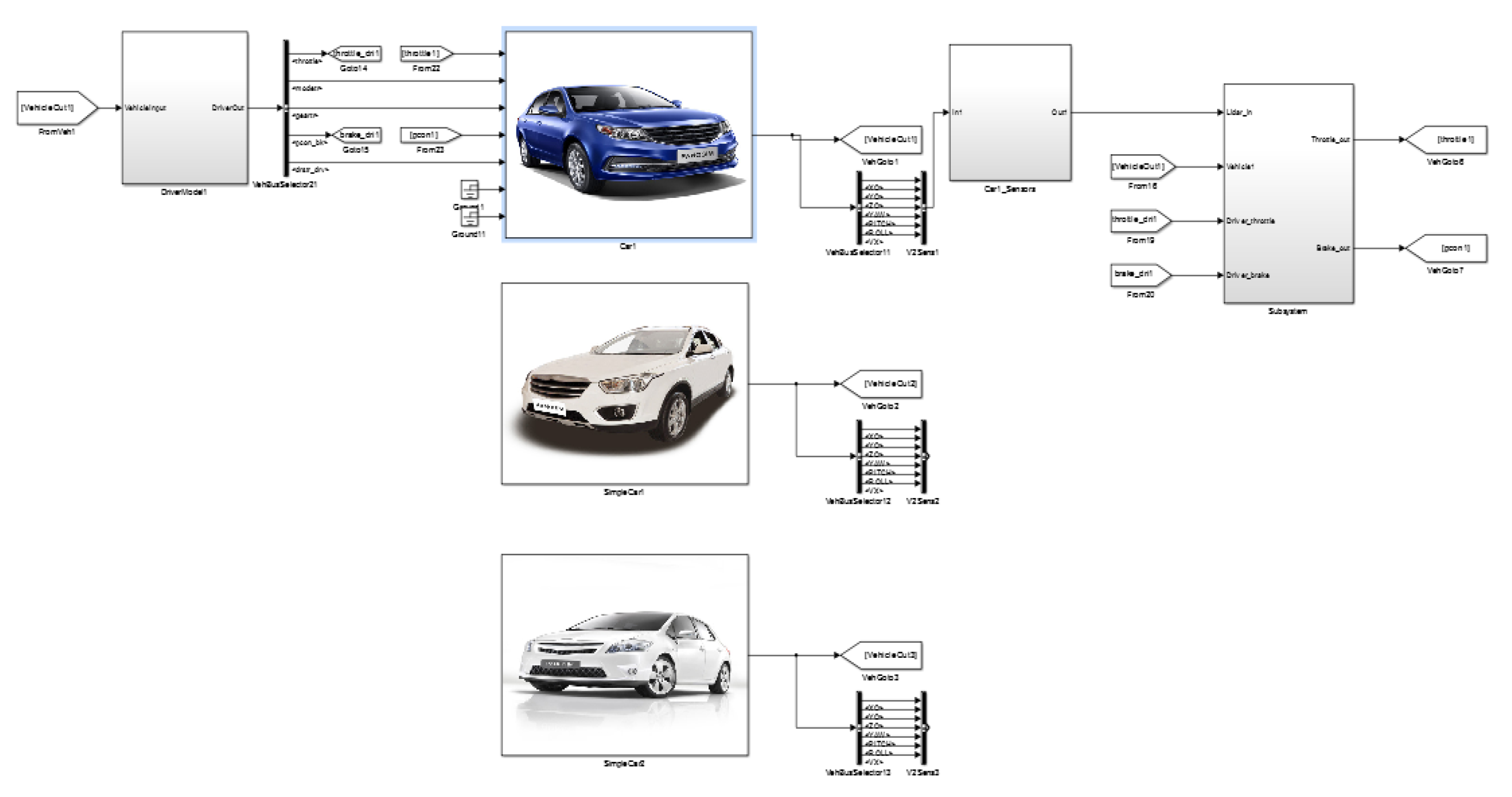
4.1.1. Parameters of Traffic Simulation Scenario
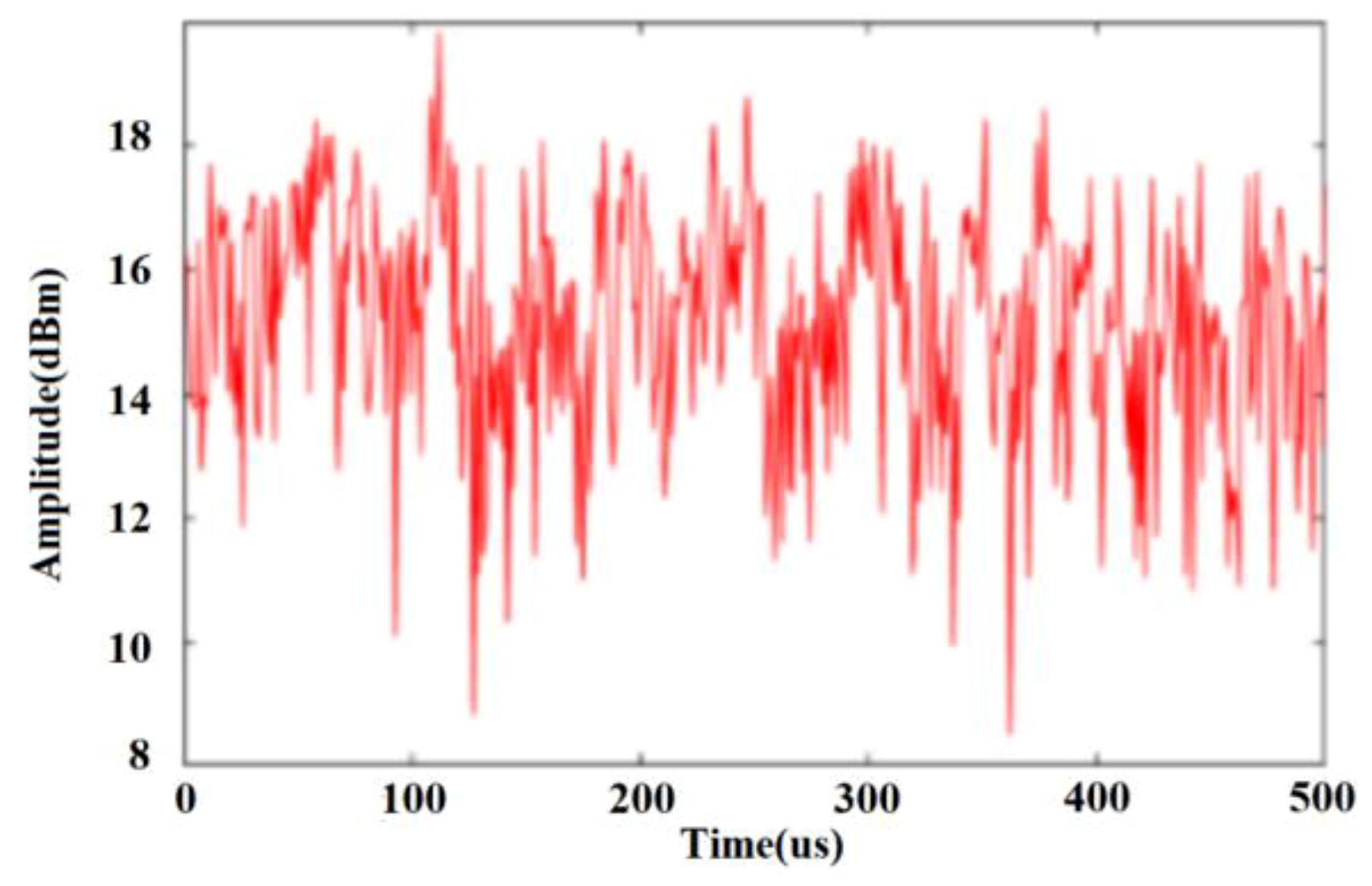
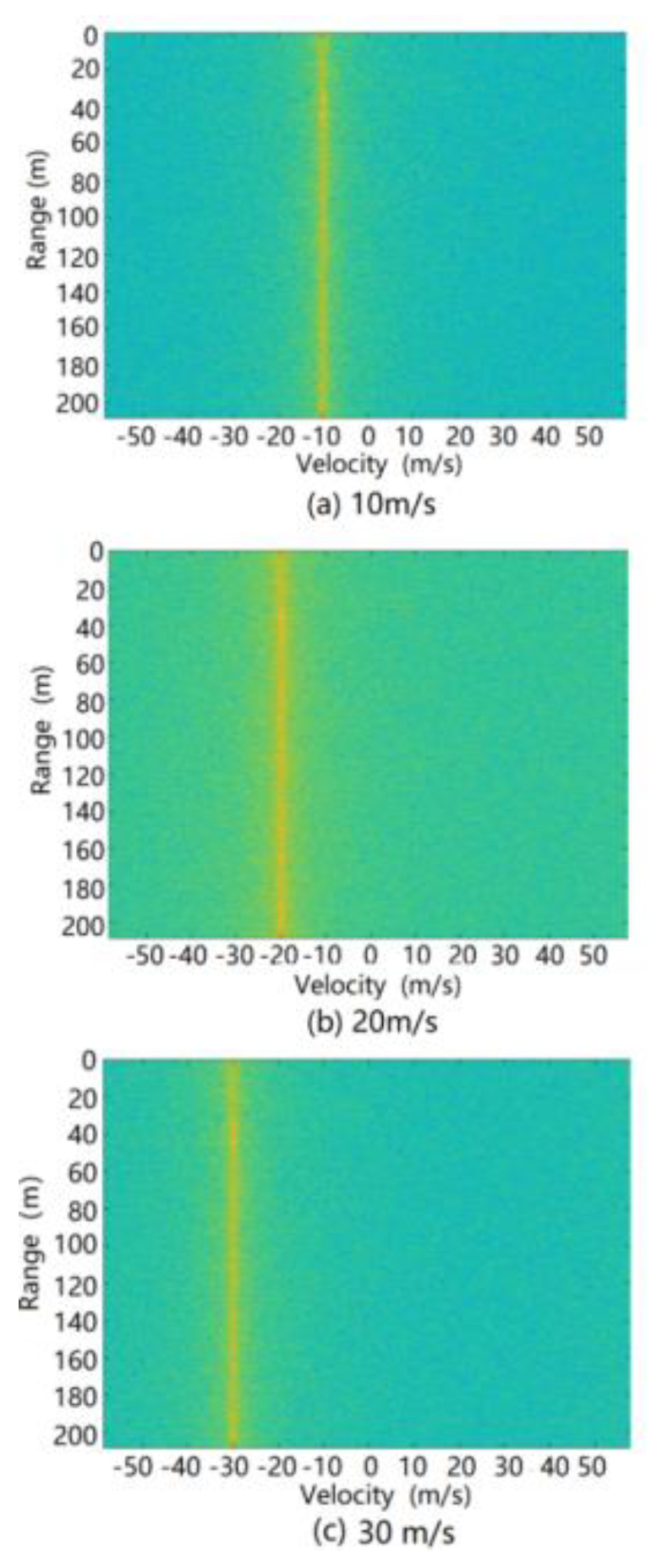
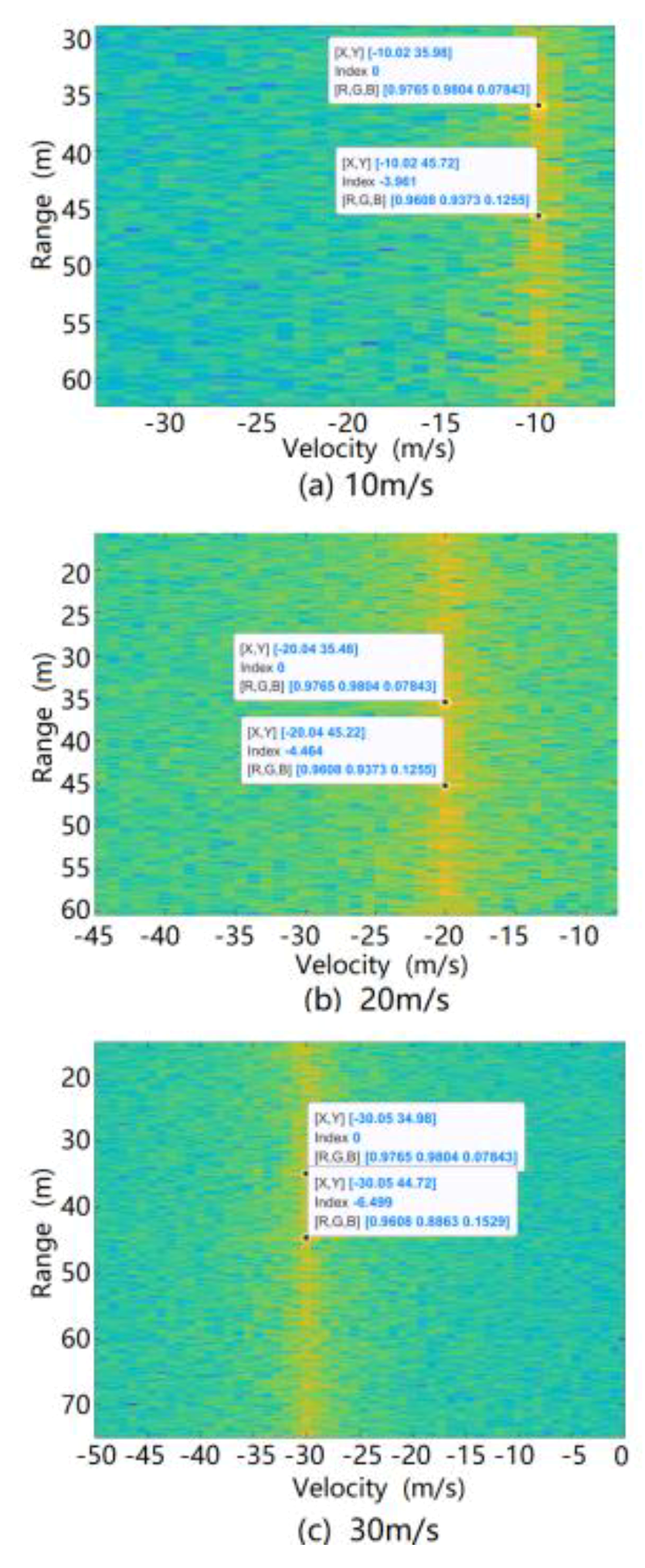
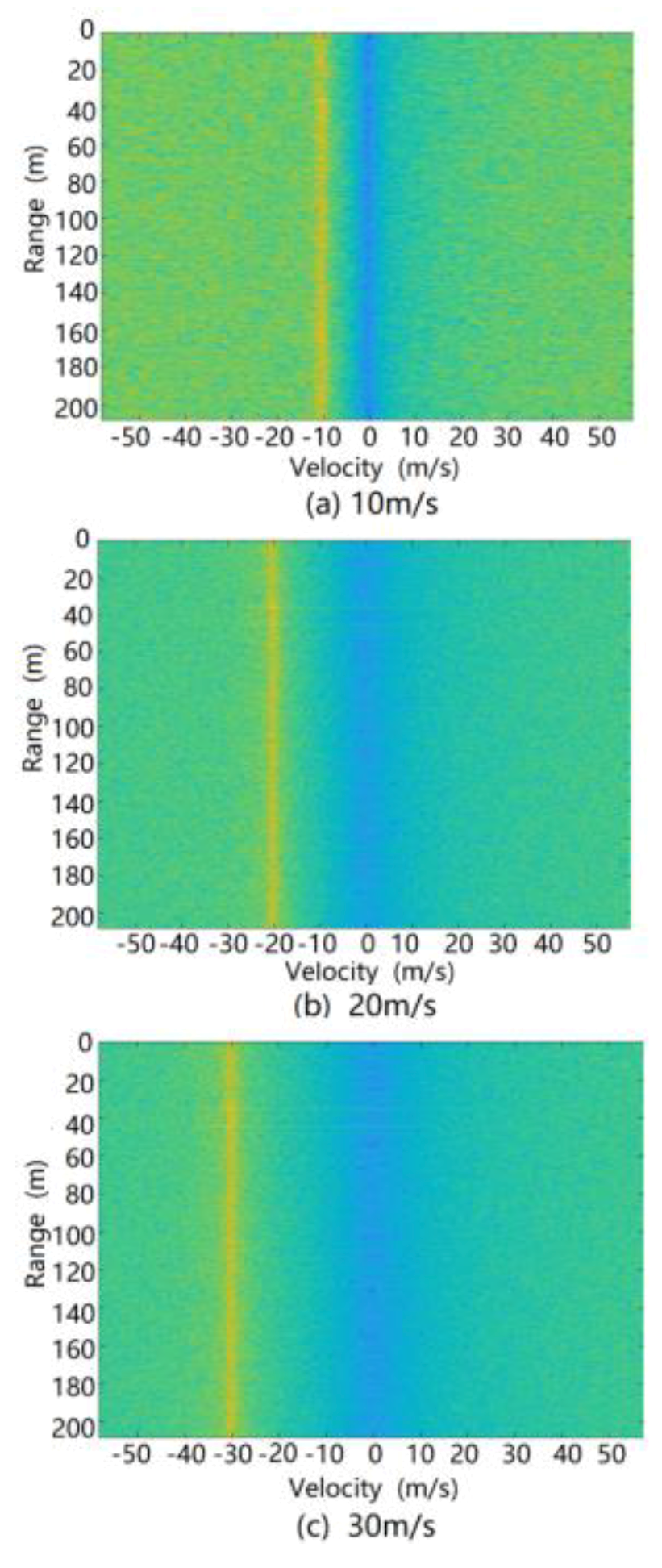
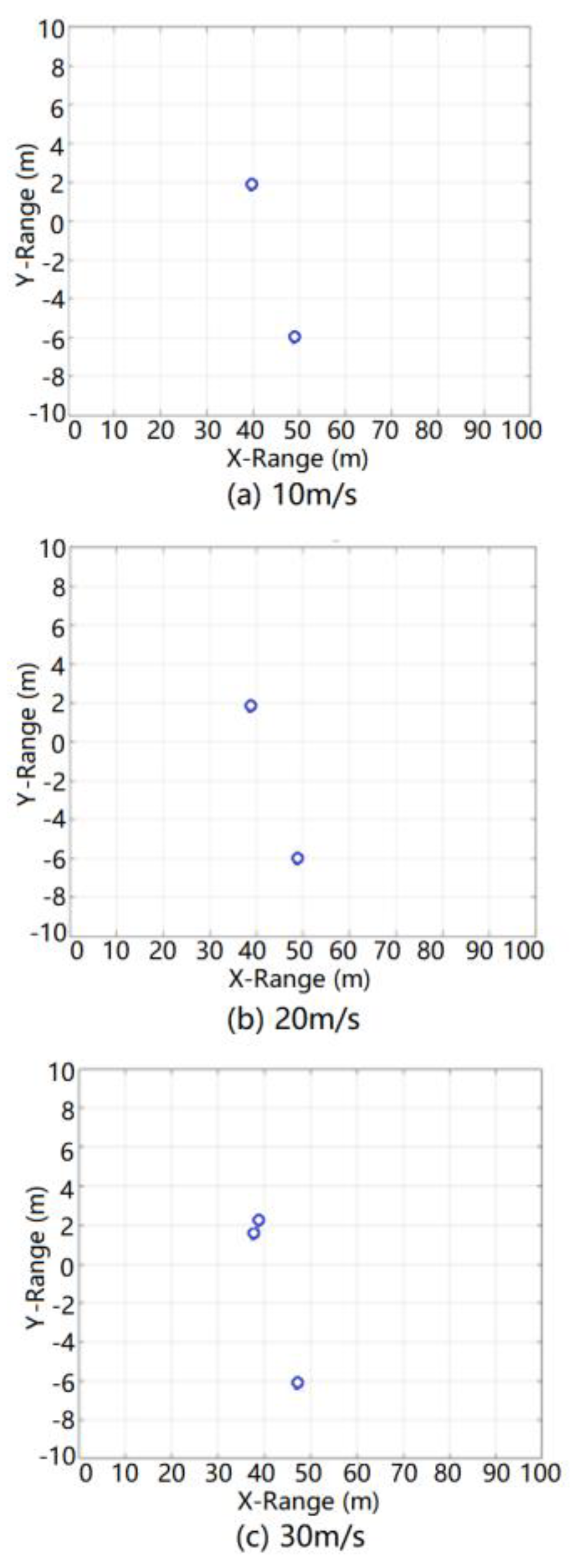
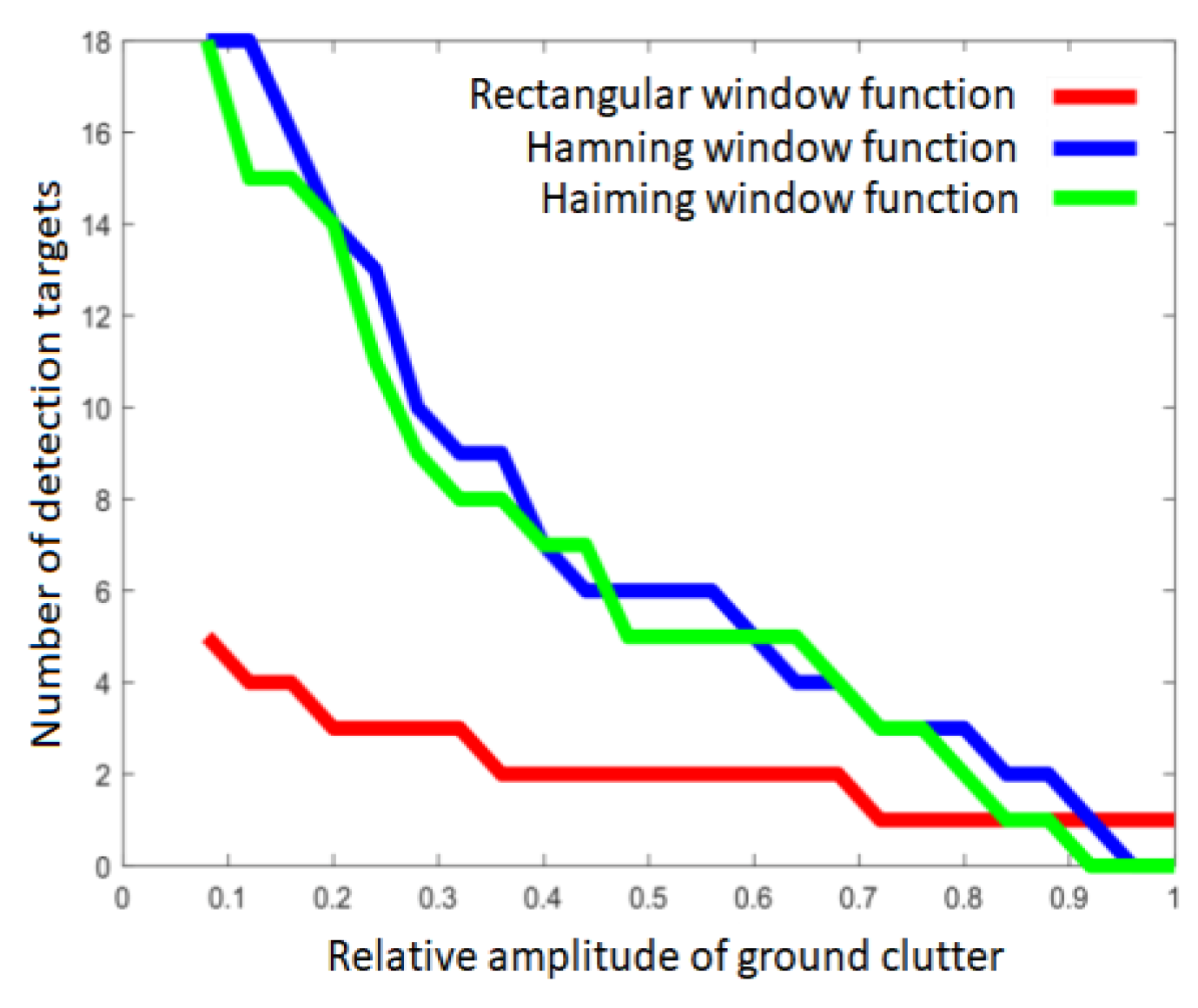
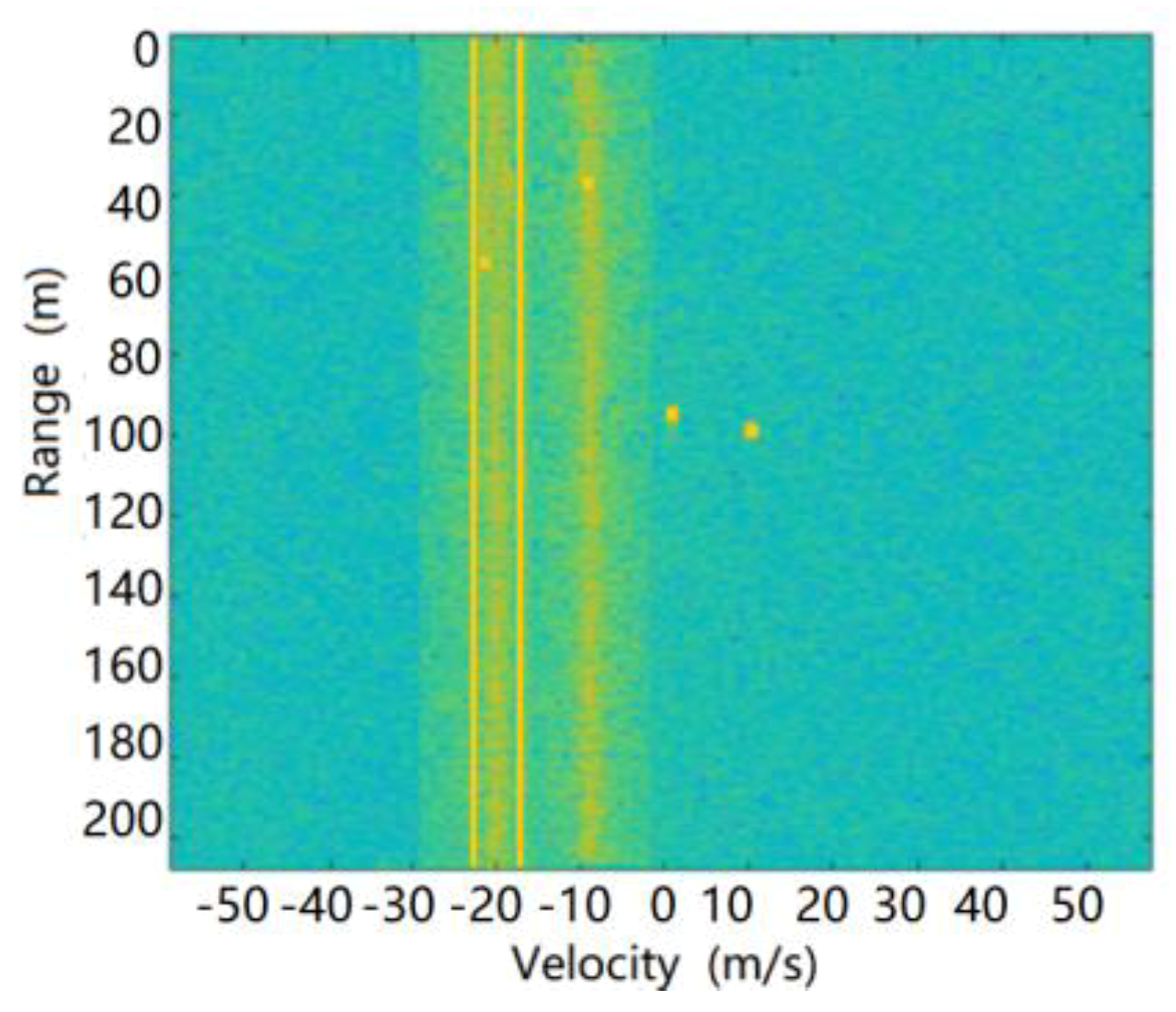
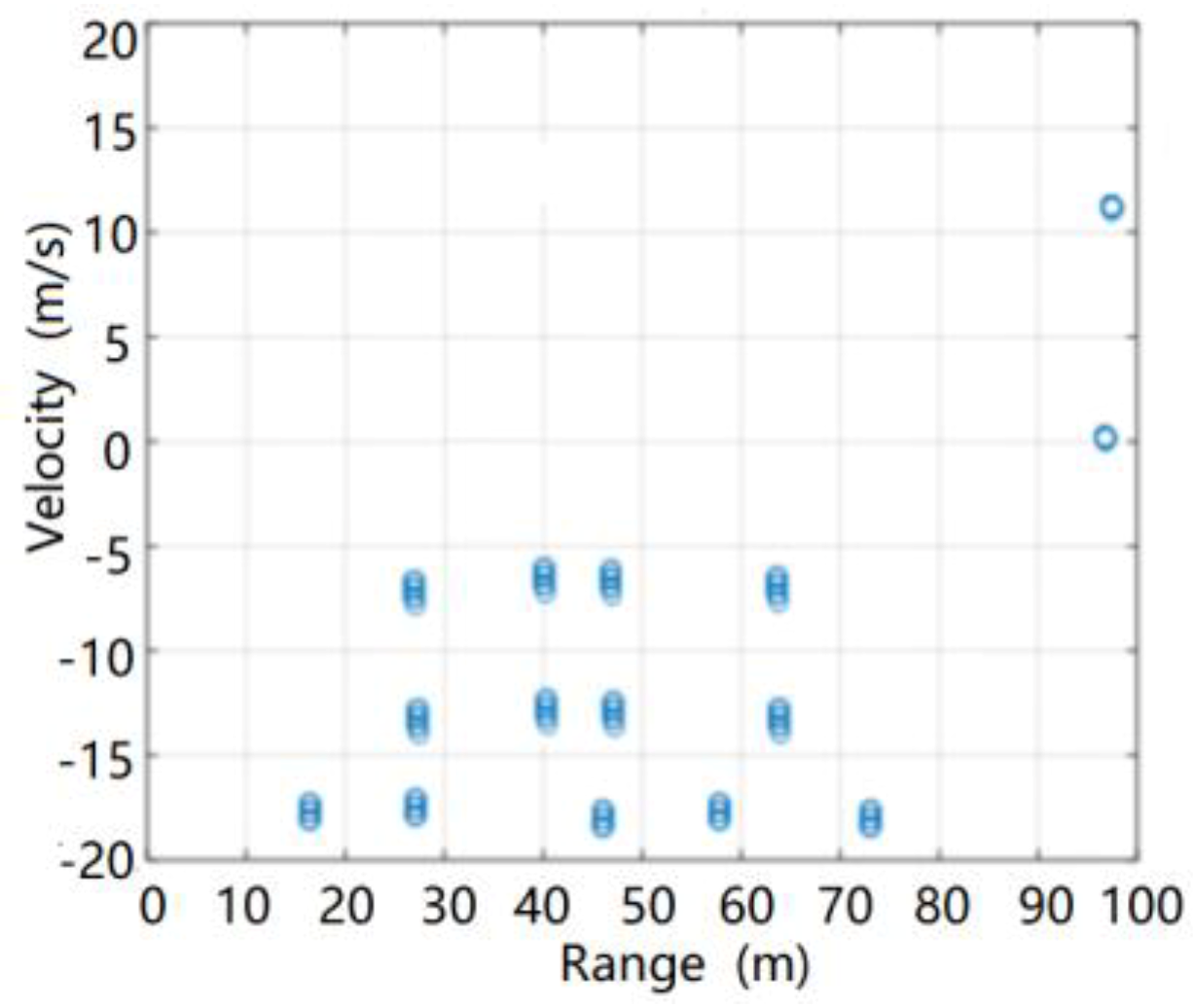
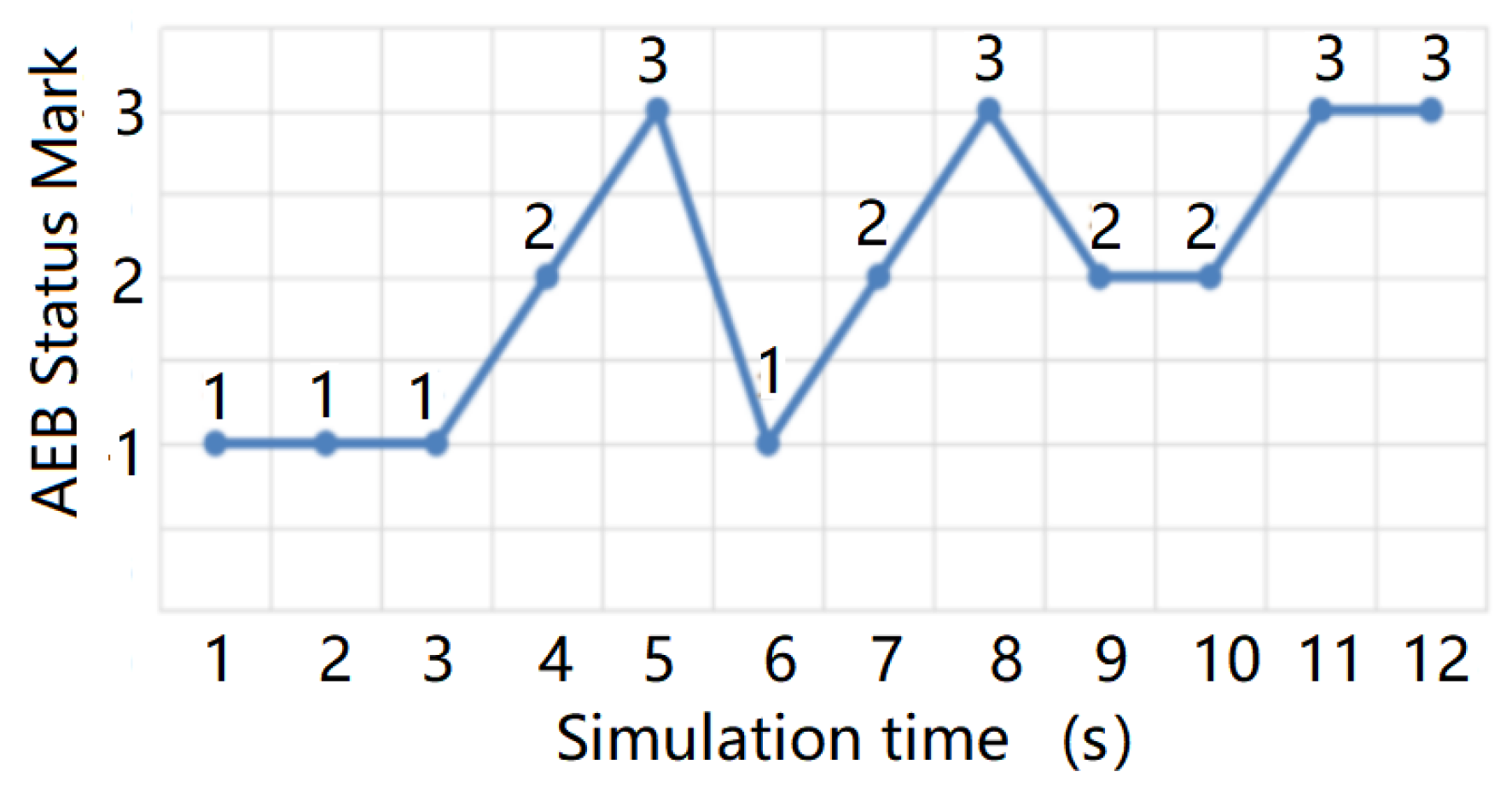
4.1.2. Simulation Results
4.2. Simulation Application of Weather Clutter
5. Discussion and Conclusions
- According to the characteristics of intelligent driving millimeter wave radar, and based on the principles of statistics and electromagnetism, millimeter wave radar for intelligent driving was analyzed for the first time, and the mechanism of environmental clutter was examined in detail.
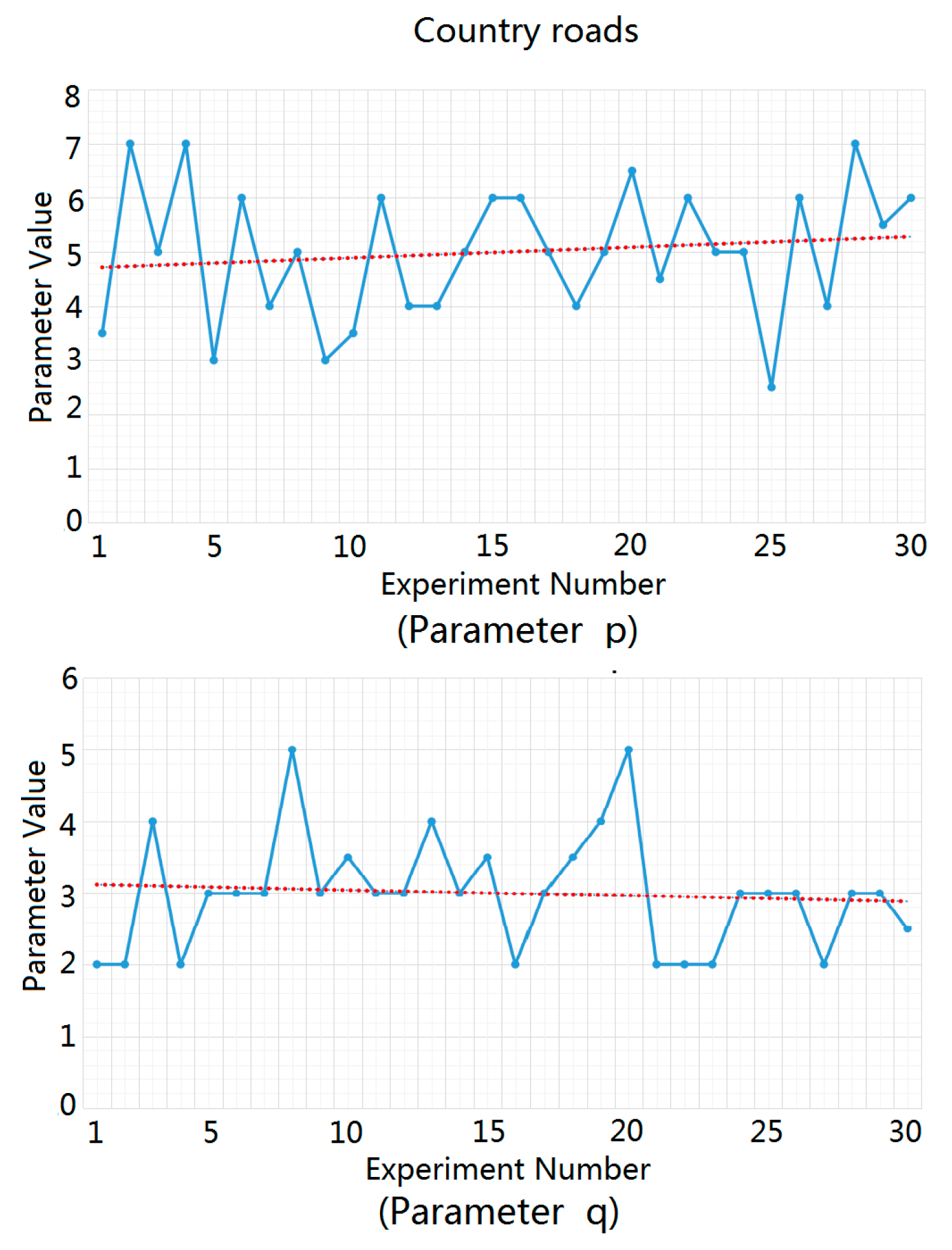
- Based on the surface characteristics in intelligent vehicle traffic scenes, the surface differences between highway traffic roads, urban traffic roads, and rural traffic roads were investigated. A simulation method for the ground clutter in millimeter wave radar for intelligent driving was proposed.
- In terms of the weather characteristics of various intelligent vehicle traffic scenes, an analysis of the statistical distribution characteristics of rain, snow, and fog provided us with the capability to distinguish weather particle size, inter-particle density, wind speed, and wind direction. A simulation method for rain, snow, and fog weather clutter of millimeter wave radar for intelligent driving was proposed.
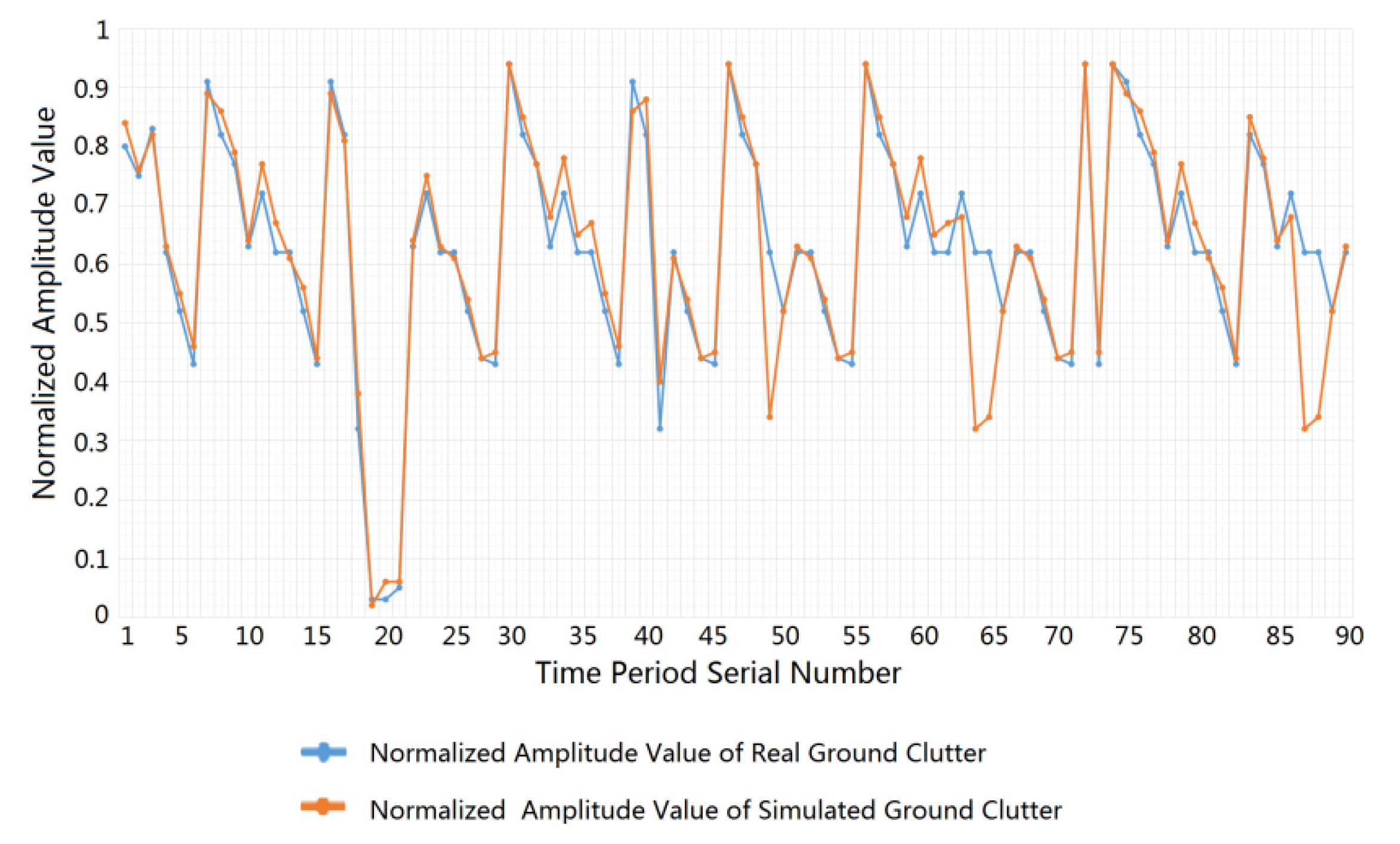
- The surface distribution characteristics under typical scenes were designed. Based on the signal processing and data processing algorithms of millimeter wave radar, the effectiveness of the ground clutter simulation method was verified.
- The distribution characteristics of rain, snow, and fog in typical scenes were designed. Based on the radar signal processing and data processing algorithms, the effectiveness of the weather clutter simulation method was verified.
- The research content of this study is an important part of the simulation model of intelligent vehicle millimeter wave radar, since it supplies the missing environmental clutter modeling and simulation method in the simulation model of intelligent vehicle millimeter wave radar, thereby solving a key problem and shortcoming.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Deng, W. Electrification and intelligent technology-the driving force of the future automobile. J. Automob. Saf. Energy Conserv. 2010, 1, 179–189. [Google Scholar]
- Song, W.; Yang, Y.; Fu, M.; Qiu, F.; Wang, M. Real-Time Obstacles Detection and Status Classification for Collision Warning in a Vehicle Active Safety System. IEEE Trans. Intell. Transp. Syst. 2018, 19, 758–773. [Google Scholar] [CrossRef]
- Seo, M.; Yoo, C.; Park, S.-S.; Nam, K. Development of Wheel Pressure Control Algorithm for Electronic Stability Control (ESC) System of Commercial Trucks. Sensors 2018, 18, 2317. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gashinova, M.; Hoare, E.; Stove, A. Predicted sensitivity of a 300GHz FMCW radar to pedestrians. In Proceedings of the 2016 46th European Microwave Conference (EuMC), London, UK, 4–6 October 2016. [Google Scholar]
- Knudde, N.; Vandersmissen, B.; Parashar, K.; Couckuyt, I.; Jalalvand, A.; Bourdoux, A.; De Neve, W.; Dhaene, T. Indoor tracking of multiple persons with a 77 GHz MIMO FMCW radar. In Proceedings of the 2017 European Radar Conference (EURAD), Nuremberg, Germany, 11–13 October 2017. [Google Scholar]
- Herzel, F.; Kissinger, D.; Ng, H.J. Analysis of Ranging Precision in an FMCW Radar Measurement Using a Phase-Locked Loop. IEEE Trans. Circuits Syst. I Regul. Pap. 2017, 65, 783–792. [Google Scholar] [CrossRef]
- Monakov, A.; Nesterov, M. Statistical Properties of FMCW Radar Altimeter Signals Scattered from a Rough Cylindrical Surface. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 323–333. [Google Scholar] [CrossRef]
- Maitra, A.; Dan, M. Propagation of Pulses at Optical Wavelengths Through Fog-filled Medium. Radio Sci. 1996, 31, 469–475. [Google Scholar] [CrossRef]
- Sun, F.; Zhu, L.; Zhang, C.; Duan, H. The research of J-Quinn ranging algorithm for LFMCW Radar. In Proceedings of the 2016 IEEE Advanced Information Management, Communicates, Electronic & Automation Control Conference, Xi’an, China, 3–5 October 2016. [Google Scholar]
- Zhang, Z.; Gong, T.; Zhu, D.; Liu, Y. High-precision ranging for radar micro-motion target based on envelope migration. In Proceedings of the 2016 CIE International Conference on Radar, Guangzhou, China, 10–13 October 2016. [Google Scholar]
- Rambach, K.; Yang, B. Direction of arrival estimation of two moving targets using a time division multiplexed colocated MIMO radar. In Proceedings of the IEEE Radar Conference, Cincinnati, OH, USA, 19–23 May 2014; pp. 1118–1123. [Google Scholar]
- Zhang, Y.; Li, Q.; Huang, L.; Song, J. Waveform design for joint radar-communication system with multi-user based on MIMO radar. In Proceedings of the 2017 IEEE Radar Conference, Seattle, WA, USA, 8–12 May 2017. [Google Scholar]
- Wu, L.; Wang, L.; Min, L.; Hou, W.; Guo, Z.; Zhao, J.; Li, N. Discrimination of Algal-Bloom Using Spaceborne SAR Observations of Great Lakes in China. Remote Sens. 2018, 10, 767. [Google Scholar] [CrossRef] [Green Version]
- Vu, P.; Haimovich, A.M.; Himed, B. Direct tracking of multiple targets in MIMO radar. In Proceedings of the 2016 50th Asilomar Conference on Signals, Systems & Computers, Pacific Grove, CA, USA, 6–9 November 2016. [Google Scholar]
- Sediono, W.; Sediono, W. Method of measuring Doppler shift of moving targets using FMCW maritime radar. In Proceedings of the 2013 IEEE International Conference on Teaching, Bali, Indonesia, 26–29 August 2013. [Google Scholar]
- Pfeffer, C.; Feger, R.; Wagner, C.; Stelzer, A. FMCW MIMO Radar System for Frequency-Division Multiple TX-Beamforming. IEEE Trans. Microw. Theory Tech. 2013, 61, 4262–4274. [Google Scholar] [CrossRef]
- Yin, J.; Unal, C.; Russchenberg, H. Narrow-Band Clutter Mitigation in Spectral Polarimetric Weather Radar. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4655–4667. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Highway | Urban Road | Rural Road |
|---|---|---|---|
| p | 3 | 7 | 5 |
| q | 4 | 6 | 3 |
| Parameter | Radar Car | Car Number 2 | Car Number 3 | Car Number 4 | Car Number 5 |
|---|---|---|---|---|---|
| Driving speed | 20 m/s | 0 m/s | 20 m/s | 30 m/s | 10 m/s |
| Relative distance | 0 m | 60 m | 100 m | 100 m | 40 m |
| Parameter | Parameter Value |
|---|---|
| Radar center carrier frequency | 77 GHz |
| Transmission power | 25 dbm |
| Transmitting antenna gain | 27 dB |
| Receiver antenna gain | 27 dB |
| Parameter | Parameter Value |
|---|---|
| Pavement parameter | 3 |
| Pavement parameter | 4 |
| Parameter | Parameter Value |
|---|---|
| Rainfall rate | 10 mm/h |
| Raindrop diameter | 2 mm |
| Ambient temperature | 27 °C |
| Wind speed | 10 m/s |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Tao, X.; Zhu, B.; Deng, W. Research on a Simulation Method of the Millimeter Wave Radar Virtual Test Environment for Intelligent Driving. Sensors 2020, 20, 1929. https://doi.org/10.3390/s20071929
Li X, Tao X, Zhu B, Deng W. Research on a Simulation Method of the Millimeter Wave Radar Virtual Test Environment for Intelligent Driving. Sensors. 2020; 20(7):1929. https://doi.org/10.3390/s20071929
Chicago/Turabian StyleLi, Xin, Xiaowen Tao, Bing Zhu, and Weiwen Deng. 2020. "Research on a Simulation Method of the Millimeter Wave Radar Virtual Test Environment for Intelligent Driving" Sensors 20, no. 7: 1929. https://doi.org/10.3390/s20071929