Robust Outlier-Adaptive Filtering for Vision-Aided Inertial Navigation



Abstract
:1. Introduction
1.1. Related Work
1.1.1. State Estimation for Measurements with Outliers
1.1.2. Outlier Rejection Techniques
1.2. Summary of Contributions
1.3. A Guide to This Document
2. Preliminaries
2.1. The Extended Kalman Filter
2.1.1. Time Update
2.1.2. Measurement Update
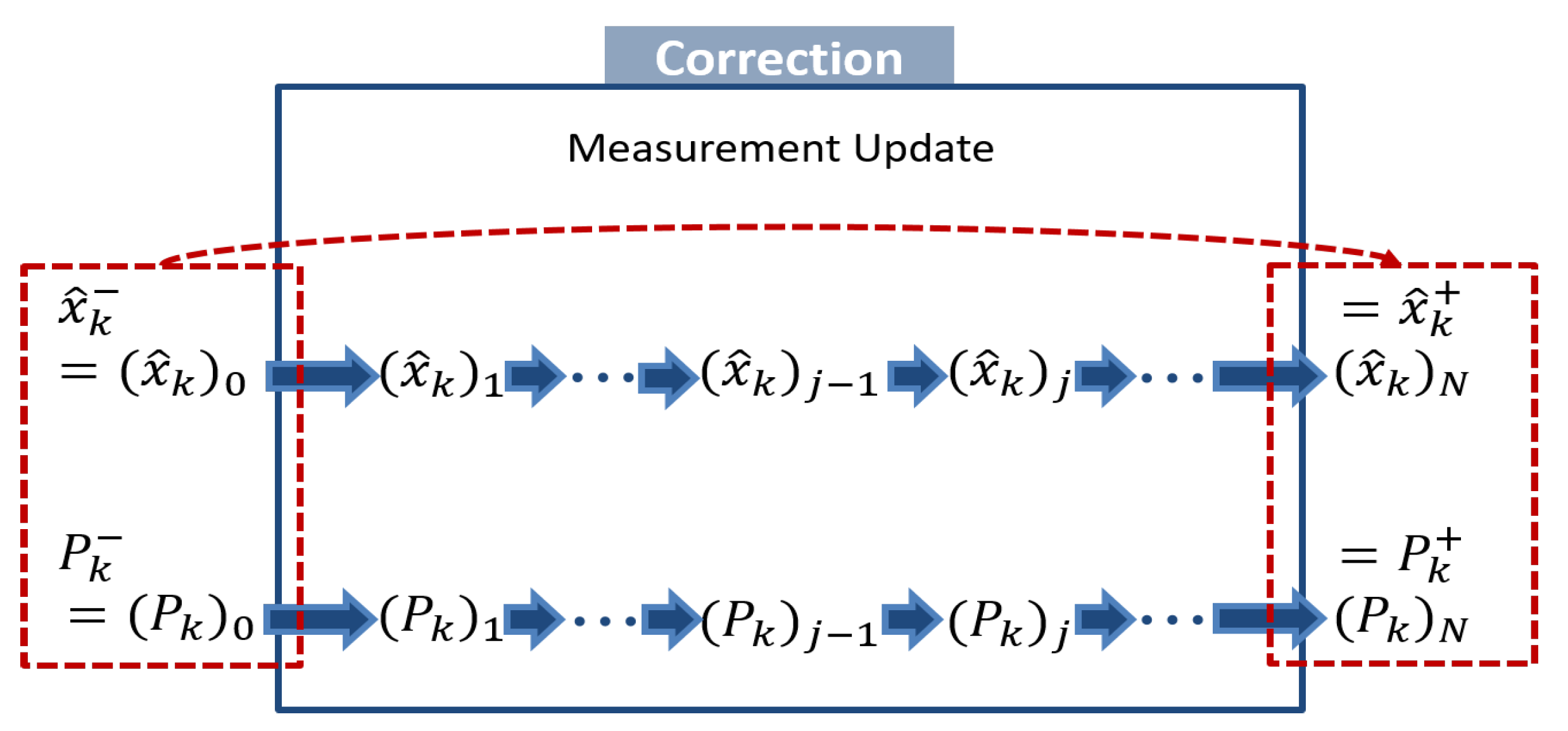
2.1.3. Sequential Measurement Update
2.2. Models of Vision-Aided Inertial Navigation
2.2.1. Vehicle Model
2.2.2. Camera Model
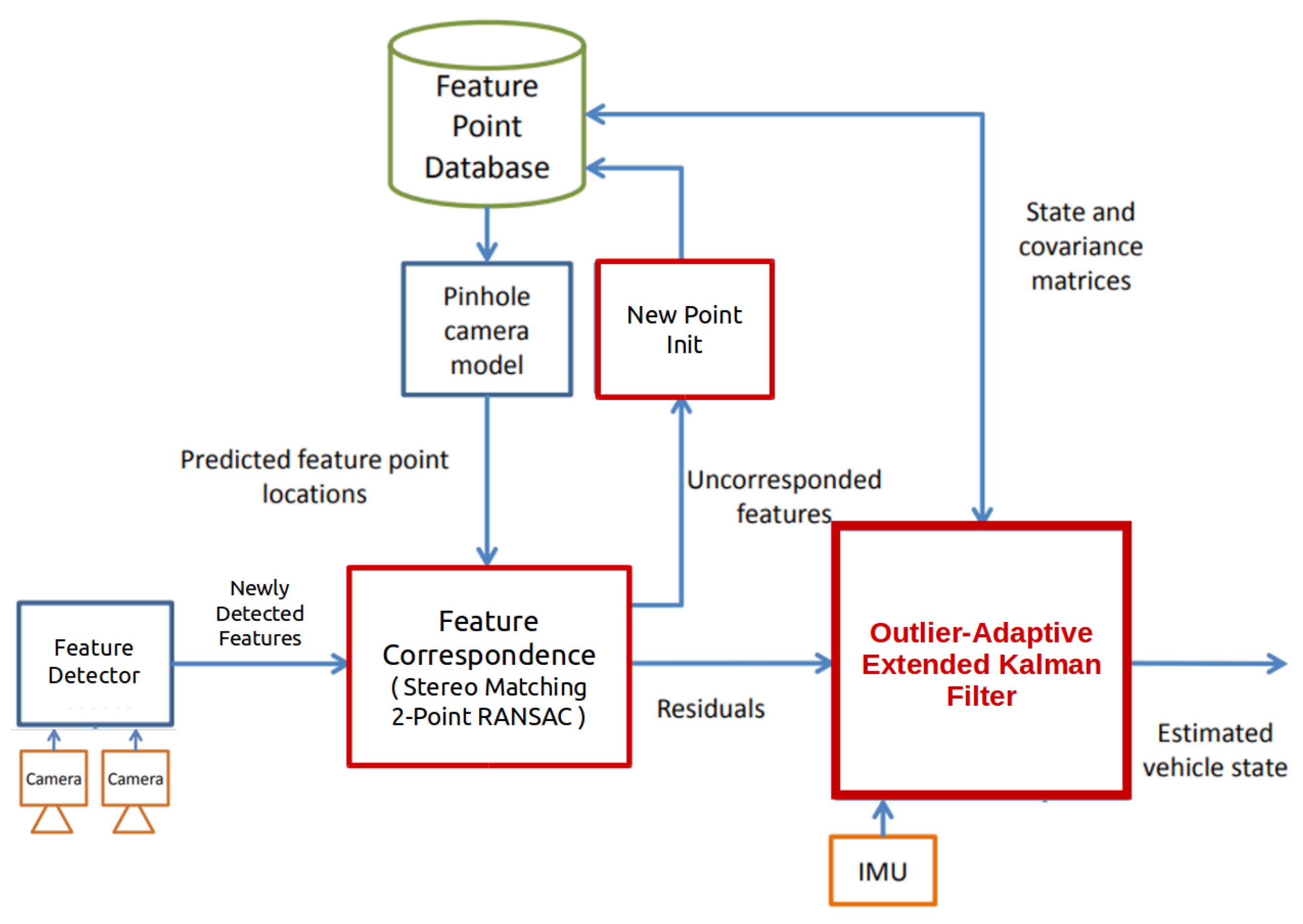
3. Outlier Rejection in Image Processing Front-End
3.1. Feature Correspondence
3.2. Algorithm of Feature Correspondence
| Algorithm 1 Feature Correspondence for Outlier Rejection |
| Require: Pyramids and outlier-rejected points of previous , images |
|
4. Outlier Adaptation in Filtering Back-End
4.1. Outlier Removal in Feature Initialization
4.2. Outlier Detection by Chi-Squared Statistical Test
4.3. Outlier-Adaptive Filtering
4.3.1. Student’s t-Distribution
4.3.2. Variational Inference
5. Implementation
5.1. Marginalization of Feature States
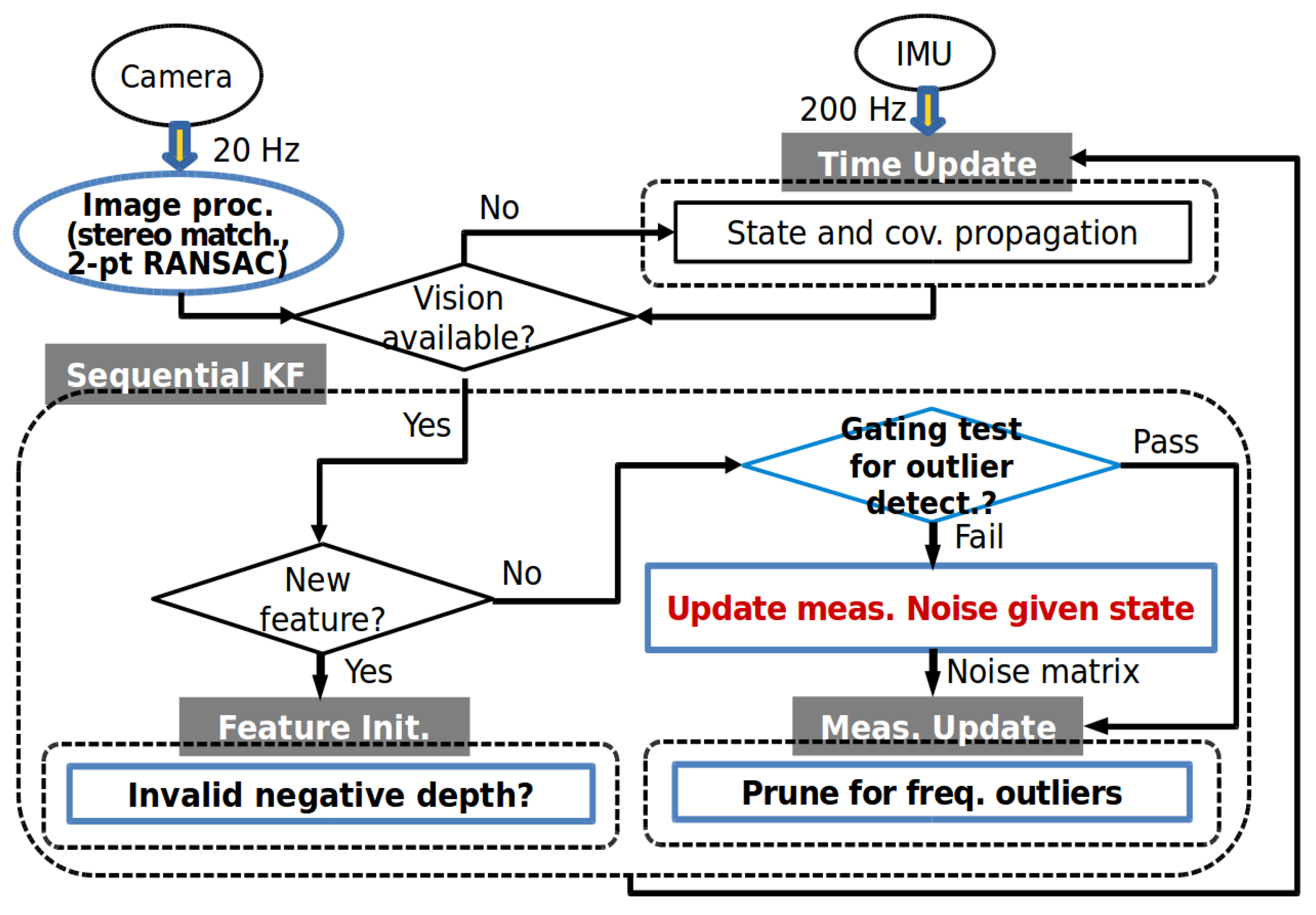
5.2. Summarized Algorithm
| Algorithm 2 The Outlier-Adaptive Filtering |
| Require: |
|
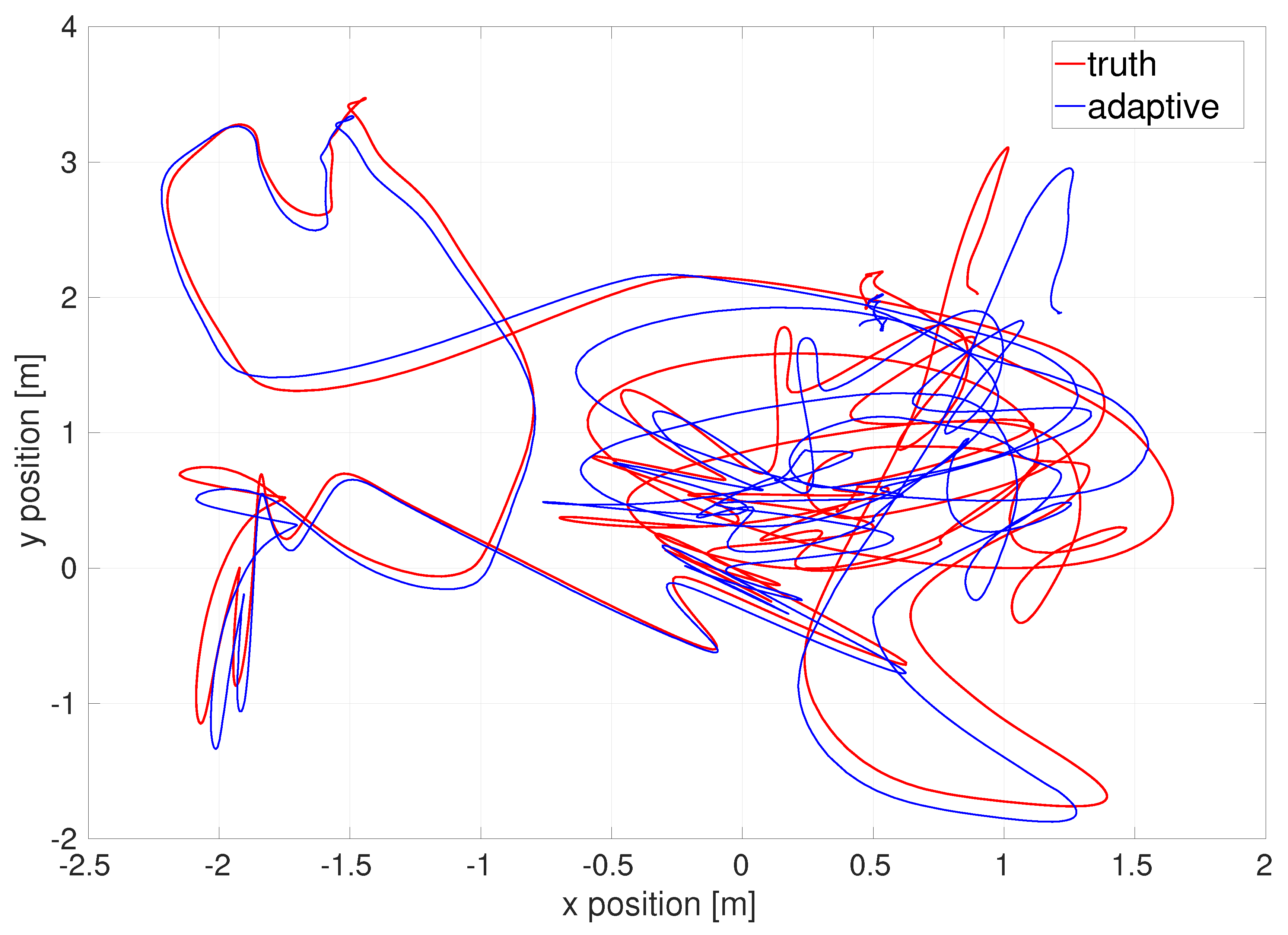
6. Flight Datasets Test Results
7. Discussion
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| V-INS | Vision-aided Inertial Navigation Systems |
| VIO | Visual-Inertial Odometry |
| IMU | Inertial Measurement Unit |
| MEMS | Micro-ElectroMechanical System |
| EKF | Extended Kalman Filter |
| UAV | Unmanned Aerial Vehicle |
| RANSAC | RANdom SAmple Consensus |
| FAST | Features from Accelerated Segment Test |
| KLT | Kanade–Lucas–Tomasi |
| ST | Student’s t-distribution |
| ROS | Robot Operating System |
Nomenclature
| x | state | y | measurement |
| k | discrete time | j | index of measurements |
| Q | process noise covariance | R | measurement noise covariance |
| P | error state covariance | r | residual |
Appendix A. Jacobians of Models
Appendix B. Feature Initialization
Appendix C. Experimental Equipment and Environments

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Rate | Characteristics |
|---|---|---|
| Stereo Images (Aptina MT9V034) | 2 × 20 FPS | Global Shutter, WVGA Monochrome |
| MEMS IMU (ADIS16448) | 200 Hz | Instrumentally Calibrated |
Appendix D. Evaluation Error Metric
Appendix Absolute Trajectory Error (ATE)
References
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Kalman, R.E.; Bucy, R.S. New Results in Linear Filtering and Prediction Theory. J. Basic Eng. 1961, 83, 95–108. [Google Scholar] [CrossRef]
- Anderson, B.D.; Moore, J.B. Optimal Filtering; Prentice Hall: Englewood Cliffs, NJ, USA, 1979; Chapters 2–4. [Google Scholar]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation: Theory Algorithms and Software; John Wiley & Sons: Hoboken, NJ, USA, 2004; Chapters 2–9. [Google Scholar]
- Schmidt, S.F. The Kalman Filter: Its Recognition and Development for Aerospace Applications. J. Guid. Control Dyn. 1981, 4, 4–7. [Google Scholar] [CrossRef]
- Magree, D.; Johnson, E.N. Factored Extended Kalman Filter for Monocular Vision-Aided Inertial Navigation. J. Aerosp. Inf. Syst. 2016, 13, 475–490. [Google Scholar] [CrossRef]
- Song, Y.; Nuske, S.; Scherer, S. A Multi-Sensor Fusion MAV State Estimation from Long-Range Stereo, IMU, GPS and Barometric Sensors. Sensors 2017, 17, 11. [Google Scholar] [CrossRef]
- Mostafa, M.; Zahran, S.; Moussa, A.; El-Sheimy, N.; Sesay, A. Radar and Visual Odometry Integrated System Aided Navigation for UAVS in GNSS Denied Environment. Sensors 2018, 18, 2776. [Google Scholar] [CrossRef] [Green Version]
- Hawkins, D.M. Identification of Outliers; Springer: Berlin/Heidelberg, Germany, 1980; Chapters 2–5. [Google Scholar]
- Mehra, R.K. On the Identification of Variances and Adaptive Kalman Filtering. IEEE Trans. Autom. Control 1970, 15, 175–184. [Google Scholar] [CrossRef]
- Maybeck, P.S. Stochastic Models, Estimation, and Control; Academic Press: Cambridge, MA, USA, 1982; Chapter 10; pp. 68–158. [Google Scholar]
- Stengel, R.F. Optimal Control and Estimation; Courier Corporation: Chelmsford, MA, USA, 2012; Chapter 4. [Google Scholar]
- Ting, J.A.; Theodorou, E.; Schaal, S. A Kalman Filter for Robust Outlier Detection. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Diego, CA, USA, 29 October–2 November 2007; pp. 1514–1519. [Google Scholar] [CrossRef]
- Särkkä, S.; Nummenmaa, A. Recursive Noise Adaptive Kalman Filtering by Variational Bayesian Approximations. IEEE Trans. Autom. Control 2009, 54, 596–600. [Google Scholar] [CrossRef]
- Piché, R.; Särkkä, S.; Hartikainen, J. Recursive Outlier-Robust Filtering and Smoothing for Nonlinear Systems Using the Multivariate Student-t Distribution. In Proceedings of the IEEE International Workshop on Machine Learning for Signal Processing (MLSP), Santander, Spain, 23–26 September 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Roth, M.; Özkan, E.; Gustafsson, F. A Student’s t Filter for Heavy Tailed Process and Measurement Noise. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Vancouver, BC, Canada, 26–31 May 2013; pp. 5770–5774. [Google Scholar] [CrossRef] [Green Version]
- Solin, A.; Särkkä, S. State Space Methods for Efficient Inference in Student-t Process Regression. In Proceedings of the International Conference on Artificial Intelligence and Statistics, San Diego, CA, USA, 9–12 May 2015; pp. 885–893. [Google Scholar]
- Agamennoni, G.; Nieto, J.I.; Nebot, E.M. An Outlier-Robust Kalman Filter. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 1551–1558. [Google Scholar] [CrossRef]
- Agamennoni, G.; Nieto, J.I.; Nebot, E.M. Approximate Inference in State-Space Models with Heavy-Tailed Noise. IEEE Trans. Signal Process. 2012, 60, 5024–5037. [Google Scholar] [CrossRef]
- Beal, M.J. Variational Algorithms for Approximate Bayesian Inference. Ph.D. Thesis, University of London, London, UK, 2003. [Google Scholar]
- Graham, M.C.; How, J.P.; Gustafson, D.E. Robust State Estimation with Sparse Outliers. J. Guid. Control Dyn. 2015, 38, 1229–1240. [Google Scholar] [CrossRef] [Green Version]
- Wu, A.D.; Johnson, E.N.; Kaess, M.; Dellaert, F.; Chowdhary, G. Autonomous Flight in GPS-Denied Environments Using Monocular Vision and Inertial Sensors. J. Aerosp. Inf. Syst. 2013, 10, 172–186. [Google Scholar] [CrossRef]
- Nakamura, T.; Haviland, S.T.; Bershadsky, D.; Johnson, E.N. Vision Sensor Fusion for Autonomous Landing. In Proceedings of the AIAA Information Systems-AIAA Infotech@ Aerospace, Grapevine, TX, USA, 9–13 January 2017; p. 0674. [Google Scholar] [CrossRef]
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches; John Wiley & Sons: Hoboken, NJ, USA, 2006; Chapters 2–13. [Google Scholar]
- Lee, K. Adaptive Filtering for Vision-Aided Inertial Navigation. Ph.D. Thesis, Georgia Institute of Technology, Atlanta, GA, USA, 2018. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision; Cambridge University Press: Cambridge, UK, 2003; pp. 22–236. [Google Scholar]
- Troiani, C.; Martinelli, A.; Laugier, C.; Scaramuzza, D. 2-Point-Based Outlier Rejection for Camera-IMU Systems with Applications to Micro Aerial Vehicles. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 5530–5536. [Google Scholar] [CrossRef] [Green Version]
- Kriegel, H.P.; Kröger, P.; Zimek, A. Outlier Detection Techniques. Tutor. KDD 2010, 10, 1–76. [Google Scholar]
- Angelov, P. Anomaly Detection Based on Eccentricity Analysis. In Proceedings of the IEEE Symposium on Evolving and Autonomous Learning Systems (EALS), Orlando, FL, USA, 9–12 December 2014; pp. 1–8. [Google Scholar] [CrossRef]
- Costa, B.S.J.; Bezerra, C.G.; Guedes, L.A.; Angelov, P.P. Online Fault Detection Based on Typicality and Eccentricity Data Analytics. In Proceedings of the IEEE International Joint Conference on Neural Networks (IJCNN), Killarney, Ireland, 12–17 July 2015; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Lee, K.; Johnson, E.N. Robust State Estimation and Online Outlier Detection Using Eccentricity Analysis. In Proceedings of the IEEE Conference on Control Technology and Applications (CCTA), Mauna Lani, HI, USA, 27–30 August 2017; pp. 1350–1355. [Google Scholar] [CrossRef]
- Chang, G. Robust Kalman Filtering Based on Mahalanobis Distance as Outlier Judging Criterion. J. Geod. 2014, 88, 391–401. [Google Scholar] [CrossRef]
- Mahalanobis, P.C. On the Generalized Distance in Statistics; National Institute of Science of India: Brahmapur, India, 1936. [Google Scholar]
- Atkinson, K.E. An Introduction to Numerical Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2008; Chapters 5–6. [Google Scholar]
- Gelb, A. Applied Optimal Estimation; MIT Press: Cambridge, MA, USA, 1974; Chapters 4, 6; pp. 102–155, 180–228. [Google Scholar]
- Crassidis, J.L.; Junkins, J.L. Optimal Estimation of Dynamic Systems; CRC Press: Boca Raton, FL, USA, 2011; Chapters 3–4. [Google Scholar]
- Stevens, B.L.; Lewis, F.L.; Johnson, E.N. Aircraft Control and Simulation: Dynamics, Controls Design, and Autonomous Systems; John Wiley & Sons: Hoboken, NJ, USA, 2015; Chapters 1–2. [Google Scholar]
- Markley, F.L. Attitude Error Representations for Kalman Filtering. J. Guid. Control Dyn. 2003, 26, 311–317. [Google Scholar] [CrossRef]
- Sola, J. Quaternion Kinematics for the Error-State Kalman Filter. arXiv 2017, arXiv:1711.02508. [Google Scholar]
- Woodman, O.J. An Introduction to Inertial Navigation; Technical Report; University of Cambridge, Computer Laboratory: Cambridge, UK, 2007. [Google Scholar]
- Titterton, D.; Weston, J.L.; Weston, J. Strapdown Inertial Navigation Technology; The Institution of Engineering and Technology (IET): London, UK, 2004; Volume 17, Chapters 4–7. [Google Scholar]
- Forsyth, D.A.; Ponce, J. Computer Vision: A Modern Approach; Prentice Hall: Upper Saddle River, NJ, USA, 2002; Chapters 4–5. [Google Scholar]
- Trajković, M.; Hedley, M. Fast Corner Detection. Image Vis. Comput. 1998, 16, 75–87. [Google Scholar] [CrossRef]
- Rosten, E.; Drummond, T. Machine Learning for High-Speed Corner Detection. In Proceedings of the European Conference on Computer Vision (ECCV); Springer: Berlin/Heidelberg, Germany, 2006; pp. 430–443. [Google Scholar] [CrossRef]
- Lucas, B.D.; Kanade, T. An Iterative Image Registration Technique with an Application to Stereo Vision. In Proceedings of the 7th International Joint Conference on Artificial Intelligence, Vancouver, BC, Canada, 24–28 August 1981; Morgan Kaufmann Publishers Inc.: Bullington, MA, USA, 1981; Volume 2, pp. 674–679. [Google Scholar]
- Paul, M.K.; Wu, K.; Hesch, J.A.; Nerurkar, E.D.; Roumeliotis, S.I. A Comparative Analysis of Tightly-Coupled Monocular, Binocular, and Stereo Vins. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 165–172. [Google Scholar] [CrossRef]
- Sun, K.; Mohta, K.; Pfrommer, B.; Watterson, M.; Liu, S.; Mulgaonkar, Y.; Taylor, C.J.; Kumar, V. Robust Stereo Visual Inertial Odometry for Fast Autonomous Flight. IEEE Robot. Autom. Lett. 2018, 3, 965–972. [Google Scholar] [CrossRef] [Green Version]
- Kitt, B.; Geiger, A.; Lategahn, H. Visual Odometry Based on Stereo Image Sequences with Ransac-Based Outlier Rejection Scheme. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), San Diego, CA, USA, 21–24 June 2010; pp. 486–492. [Google Scholar] [CrossRef] [Green Version]
- Open CV. 2019. Available online: https://opencv.org/ (accessed on 8 November 2019).
- Devore, J.L. Probability and Statistics for Engineering and the Sciences; Cengage Learning: Boston, MA, USA, 2015; Chapter 7; pp. 267–299. [Google Scholar]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: Berlin/Heidelberg, Germany, 2006; Chapter 10; pp. 461–522. [Google Scholar]
- Burri, M.; Nikolic, J.; Gohl, P.; Schneider, T.; Rehder, J.; Omari, S.; Achtelik, M.W.; Siegwart, R. The EuRoC Micro Aerial Vehicle Datasets. Int. J. Robot. Res. 2016, 35, 1157–1163. [Google Scholar] [CrossRef]
- Sturm, J.; Engelhard, N.; Endres, F.; Burgard, W.; Cremers, D. A Benchmark for the Evaluation of RGB-D SLAM Systems. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura, Portugal, 7–12 October 2012; pp. 573–580. [Google Scholar] [CrossRef] [Green Version]
- Delmerico, J.; Scaramuzza, D. A Benchmark Comparison of Monocular Visual-Inertial Odometry Algorithms for Flying Robots. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018. number CONF. [Google Scholar] [CrossRef]
- Faessler, M.; Fontana, F.; Forster, C.; Mueggler, E.; Pizzoli, M.; Scaramuzza, D. Autonomous, Vision-Based Flight and Live Dense 3D Mapping with a Quadrotor Micro Aerial Vehicle. J. Field Robot. 2016, 33, 431–450. [Google Scholar] [CrossRef]
- Forster, C.; Zhang, Z.; Gassner, M.; Werlberger, M.; Scaramuzza, D. SVO: Semidirect Visual Odometry for Monocular and Multicamera Systems. IEEE Trans. Robot. 2017, 33, 249–265. [Google Scholar] [CrossRef] [Green Version]
- Mourikis, A.I.; Roumeliotis, S.I. A Multi-State Constraint Kalman Filter for Vision-Aided Inertial Navigation. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Roma, Italy, 10–14 April 2007; pp. 3565–3572. [Google Scholar] [CrossRef]
- Xiong, S.; Zhou, Z.; Zhong, L.; Xu, C.; Zhang, W. Adaptive Filtering of Color Noise Using the Kalman Filter Algorithm. In Proceedings of the 17th IEEE Instrumentation and Measurement Technology Conference (IMTC), Baltimore, MD, USA, 1–4 May 2000; Volume 2, pp. 1009–1012. [Google Scholar] [CrossRef]
- Kumar, A.; Crassidis, J.L. Colored-Noise Kalman Filter for Vibration Mitigation of Position/Attitude Estimation Systems. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007; p. 6516. [Google Scholar] [CrossRef] [Green Version]
- Lee, K.; Johnson, E.N. State Estimation Using Gaussian Process Regression for Colored Noise Systems. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Lee, K.; Choi, Y.; Johnson, E.N. Kernel Embedding-Based State Estimation for Colored Noise Systems. In Proceedings of the IEEE/AIAA 36th Digital Avionics Systems Conference (DASC), St. Petersburg, FL, USA, 17–21 September 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Wu, A.D. Vision-Based Navigation and Mapping for Flight in GPS-Denied Environments. Ph.D. Thesis, Georgia Institute of Technology, Atlanta, GA, USA, 2010. [Google Scholar]
- Bjorck, A. Numerical Methods for Least Squares Problems; Society for Industrial and Applied Mathematics (SIAM): Philadelphia, PA, USA, 1996; Volume 51, Chapters 2–9. [Google Scholar]
- Montiel, J.M.; Civera, J.; Davison, A.J. Unified Inverse Depth Parametrization for Monocular SLAM. In Proceedings of the Robotics: Science and Systems, Philadelphia, PA, USA, 16–19 August 2006. [Google Scholar] [CrossRef]
- Furgale, P.; Rehder, J.; Siegwart, R. Unified Temporal and Spatial Calibration for Multi-Sensor Systems. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013; pp. 1280–1286. [Google Scholar] [CrossRef]
- Horn, B.K.; Hilden, H.M.; Negahdaripour, S. Closed-Form Solution of Absolute Orientation Using Orthonormal Matrices. J. Opt. Soc. Am. A 1988, 5, 1127–1135. [Google Scholar] [CrossRef] [Green Version]







| Multiplier on R | /10 | /3 | 1 | ×3 | ×10 | |
|---|---|---|---|---|---|---|
| RMS error [m] | 0.9240 | 0.3801 | 0.1700 | 0.5153 | 0.5610 |
| Dataset | EuRoC V1 Easy | EuRoC V1 Difficult | ||
|---|---|---|---|---|
| Slow Motion 0.41 m/s, 16.0 deg/s | Fast Motion 0.75 m/s, 35.5 deg/s | |||
| Method | Bright Scene | Motion Blur | ||
| Baseline | 0.2558 | 0.3656 | ||
| Outlier-Adaptive | 0.2237 | 0.2264 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, K.; Johnson, E.N. Robust Outlier-Adaptive Filtering for Vision-Aided Inertial Navigation. Sensors 2020, 20, 2036. https://doi.org/10.3390/s20072036
Lee K, Johnson EN. Robust Outlier-Adaptive Filtering for Vision-Aided Inertial Navigation. Sensors. 2020; 20(7):2036. https://doi.org/10.3390/s20072036
Chicago/Turabian StyleLee, Kyuman, and Eric N. Johnson. 2020. "Robust Outlier-Adaptive Filtering for Vision-Aided Inertial Navigation" Sensors 20, no. 7: 2036. https://doi.org/10.3390/s20072036
APA StyleLee, K., & Johnson, E. N. (2020). Robust Outlier-Adaptive Filtering for Vision-Aided Inertial Navigation. Sensors, 20(7), 2036. https://doi.org/10.3390/s20072036