A Macro-Pulse Photon Counting Lidar for Long-Range High-Speed Moving Target Detection


Abstract
:1. Introduction
2. System Description
2.1. System Structure of the Macro-Pulse Photon Counting Lidar
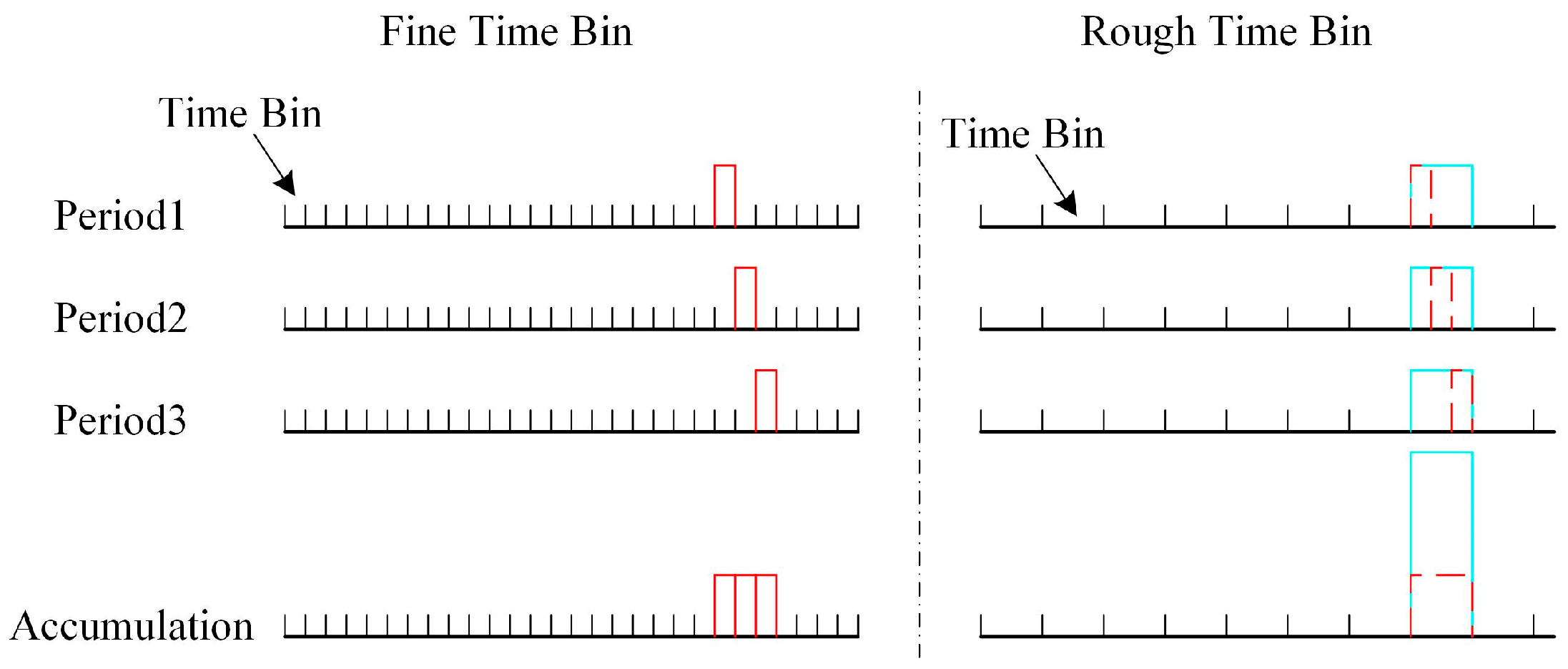
2.2. The Ranging Principle of the Macro-Pulse Photon Counting Lidar System
2.3. False Alarm Probability and Detection Probability
3. Simulation and Experiment
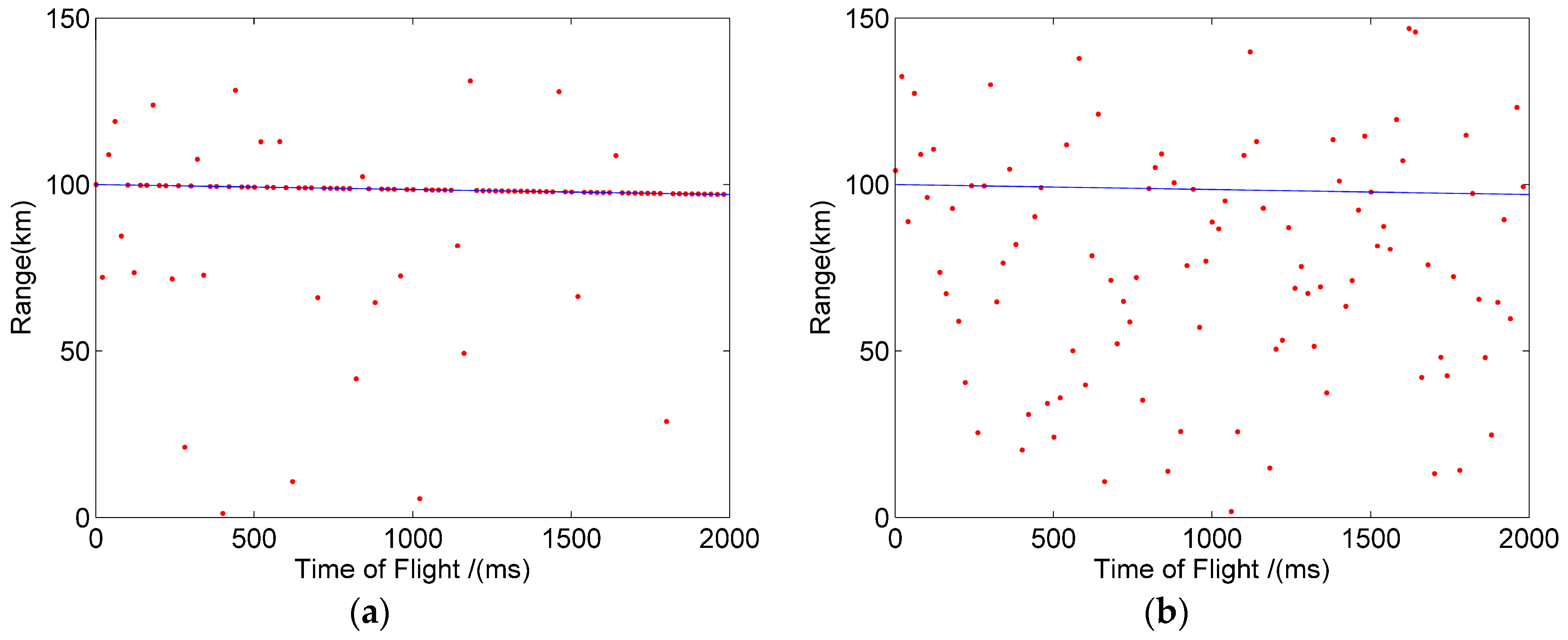
3.1. Simulation
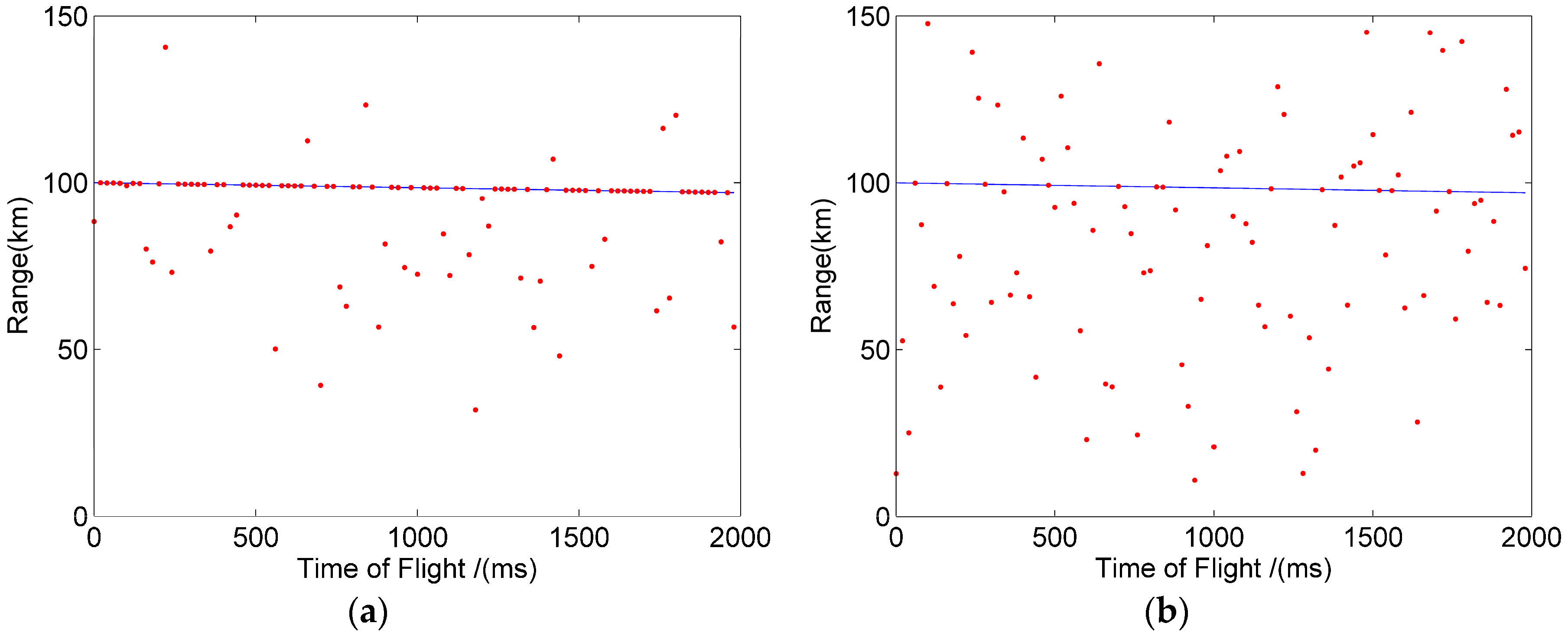
3.2. Experiment
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Albota, M.A.; Aull, B.F.; Fouche, D.G.; Heinrichs, R.M.; Kocher, D.G.; Marino, R.M.; Mooney, J.G.; Newbury, N.R.; O’Brien, M.E.; Player, B.E.; et al. Three-dimensional imaging laser radars with Geiger-mode avalanche photodiode arrays. Linc. Lab. J. 2002, 13, 351–370. [Google Scholar]
- Warburton, R.E.; McCarthy, A.; Wallace, A.M.; Hernandez-Marin, S.; Hadfield, R.H.; Nam, S.W.; Buller, G.S. Subcentimeter depth resolution using a single-photon counting time-of-flight laser ranging system at 1550 nm wavelength. Opt. Lett. 2007, 32, 2266–2268. [Google Scholar] [CrossRef] [PubMed]
- O’Brien, M.E.; Fouche, D.G. Simulation of 3d laser radar systems. Linc. Lab. J. 2005, 15, 37–60. [Google Scholar]
- Stone, W.C. Performance Analysis of Next-Generation Ladar for Manufacturing; NIST Interagency/Internal Report (NISTIR): Gaithersburg, MD, USA, 2007; p. 7117. [Google Scholar]
- Procházka, I.; Kodet, J.; Blazej, J.; Kirchner, G.; Koidl, F. Photon counting detector for space debris laser tracking and lunar laser ranging. Adv. Space Res. 2014, 54, 755–758. [Google Scholar] [CrossRef]
- Vacek, M.; Michalek, V.; Peca, M.; Prochazka, I.; Blazej, J. Photon counting Lidar for deep space applications: Concept and simulator. Proc. SPIE 2013, 8773, 877309. [Google Scholar] [CrossRef]
- Markus, T.; Neumann, T.; Martino, A.; Abdalati, W.; Brunt, K.; Csatho, B.; Farrell, S.; Fricker, H.A.; Gardner, A.; Harding, D.; et al. The Ice, Cloud, and land Elevation Satellite-2 (ICESat-2): Science requirements, concept, and implementation. Remote Sens. Environ. 2017, 190, 260–273. [Google Scholar] [CrossRef]
- Mccarthy, A.; Collins, R.J.; Krichel, N.J.; Fernández, V.; Wallace, A.M.; Buller, G.S. Long-range time-of-flight scanning sensor based on high-speed time-correlated single-photon counting. Appl. Opt. 2009, 48, 6241–6251. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Du, B.; Pang, C.; Wu, D.; Li, Z.; Peng, H.; Tao, Y.; Wu, E.; Wu, G. High-speed photon-counting laser ranging for broad range of distances. Sci. Rep. 2018, 8, 4198. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liang, Y.; Huang, J.; Ren, M.; Feng, B.; Chen, X.; Wu, E.; Wu, G.; Zeng, Z. 1550-nm time-of-flight ranging system employing laser with multiple repetition rates for reducing the range ambiguity. Opt. Express 2014, 22, 4662–4670. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jonsson, P.; Hedborg, J.; Henriksson, M.; Sjöqvist, L. Reconstruction of time-correlated single-photon counting range profiles of moving objects. In Proceedings of the Electro-optical Remote Sensing, Photonic Technologies, & Applications IX, Toulouse, France, 21 September 2015. [Google Scholar]
- Zhang, Q.; Soon, H.W.; Tian, H.; Fernando, S.; Ha, Y.; Chen, N.G. Pseudo-random single photon counting for time-resolved optical measurement. Opt. Express 2008, 16, 13233–13239. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, Q.; Chen, L.; Chen, N. Pseudo-random single photon counting: A high-speed implementation. Biomed. Opt. Express 2010, 1, 41–46. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Takeuchi, N.; Sugimoto, N.; Baba, H.; Sakurai, K. Random modulation CW Lidar. Appl. Opt. 1983, 22, 1382–1386. [Google Scholar] [CrossRef] [PubMed]
- Hiskett, P.A.; Parry, C.S.; Mccarthy, A.; Buller, G.S. A photon-counting time-of-flight ranging technique developed for the avoidance of range ambiguity at gigahertz clock rates. Opt. Express 2008, 16, 13685–13698. [Google Scholar] [CrossRef] [PubMed]
- Krichel, N.J.; Mccarthy, A.; Buller, G.S. Resolving range ambiguity in a photon counting depth imager operating at kilometer distances. Opt. Express 2010, 18, 9192–9206. [Google Scholar] [CrossRef] [PubMed]
- Ullrich, A. A novel range ambiguity resolution technique applying pulse-position modulation in time-of-flight ranging applications. Proc. SPIE 2012, 8389, 83790. [Google Scholar] [CrossRef]
- Zhang, Y.; He, Y.; Yang, F.; Luo, Y.; Chen, W. Three-dimensional imaging Lidar system based on high speed pseudorandom modulation and photon counting. Chin. Opt. Lett. 2016, 14, 111101–111105. [Google Scholar] [CrossRef] [Green Version]
- Yang, F.; Zhang, X.; He, Y.; Chen, W. High speed pseudo random modulation fiber laser ranging system. Chin. Opt. Lett. 2014, 12, 082801. [Google Scholar] [CrossRef] [Green Version]
- Oh, M.S.; Kong, H.J.; Kim, T.H.; Hong, K.H.; Kim, B.W. Reduction of range walk error in direct detection laser radar using a Geiger mode avalanche photodiode. Opt. Commun. 2010, 283, 304–308. [Google Scholar] [CrossRef]
- Gatt, P.; Johnson, S.; Nichols, T. Geiger-mode avalanche photodiode ladar receiver performance characteristics and detection statistics. Appl. Opt. 2009, 48, 3261–3276. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Velocity | 1500 m/s |
| Pulse Width | 4 ns |
| Mean signal primary electrons | 0.3 |
| Mean noise count | 1 Mcps |
| Sub-pulse number (N) | 20 |
| Dead time | 50 ns |
| Fine time bin | 100 ps |
| 1. Set high-speed moving target trajectory. |
| 2. Generate noise and signal at fine time bin. |
| 3. Determine the rough time bin and process the data in Step 2 with rough time bin. |
| 4. Based on the Step 3, the pulse accumulation method directly accumulates N period, and the macro-pulse method accumulates N sub-pulses with the shift pulse accumulation method. |
| 5. Determine the thresholds (n) of the two methods and extract the echo position. |
| Mean Echo Primary Electron Number | Detection Probability (%) | |
|---|---|---|
| Macro Pulse | Pulse Accumulation | |
| 0.35 | 67.6 | 13.4 |
| 0.5 | 94.0 | 29.4 |
| 0.75 | 99.4 | 59.4 |
| Equipment | Manufacturer | Model | Specification | |
|---|---|---|---|---|
| Laser | Connet Fiber Optics | VLSS-1064-M-PL | Wavelength | 1064 nm |
| Pulse width | 4 ns | |||
| Peak power | 1 kW | |||
| Gm-APD | Excelitas Technologies | SPCM-NIR-10-FC | Dead time | 35 ns |
| Photon detection efficiency | 2% | |||
| PIN | Thorlabs | APD310 | Bandwidth | 1 GHz |
| TCSPC | Siminics | FT1040 | Time resolution | 64 ps |
| Mean Echo Primary Electron Number | Method | Detection Probability (%) | ||
|---|---|---|---|---|
| Theory | Simulation | Experiment | ||
| 0.35 | Macro Pulse | 76.2 | 67.6 | 68.0 |
| Pulse Accumulation | 7.4 | 13.4 | 9.5 | |
| 0.5 | Macro Pulse | 94.4 | 94.0 | 90.2 |
| Pulse Accumulation | 23.3 | 29.4 | 28.8 | |
| 0.75 | Macro Pulse | 99.7 | 99.4 | 98.4 |
| Pulse Accumulation | 60.0 | 59.4 | 57.4 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Y.; Liu, B.; Chen, Z.; Li, Z. A Macro-Pulse Photon Counting Lidar for Long-Range High-Speed Moving Target Detection. Sensors 2020, 20, 2204. https://doi.org/10.3390/s20082204
Yu Y, Liu B, Chen Z, Li Z. A Macro-Pulse Photon Counting Lidar for Long-Range High-Speed Moving Target Detection. Sensors. 2020; 20(8):2204. https://doi.org/10.3390/s20082204
Chicago/Turabian StyleYu, Yang, Bo Liu, Zhen Chen, and ZhiKang Li. 2020. "A Macro-Pulse Photon Counting Lidar for Long-Range High-Speed Moving Target Detection" Sensors 20, no. 8: 2204. https://doi.org/10.3390/s20082204