A-CRNN-Based Method for Coherent DOA Estimation with Unknown Source Number


Abstract
:1. Introduction
- We design a framework based on alternate convolutional-recurrent neural network (A-CRNN), which is feasible to DOA estimation regardless of the signal coherence.
- The scheme that source number is jointly determined by multi-label estimators and reconstructed Toeplitz matrices is employed, which greatly improves the performance of direction finding.
- Considering the class and label imbalances happening during the training of sub-networks, we adopt loss [22] and data augmentation to reduce the negative effects.
- Colored noise and other array imperfections are considered, which validates the robustness for potential practical systems.
2. Problem Formulations
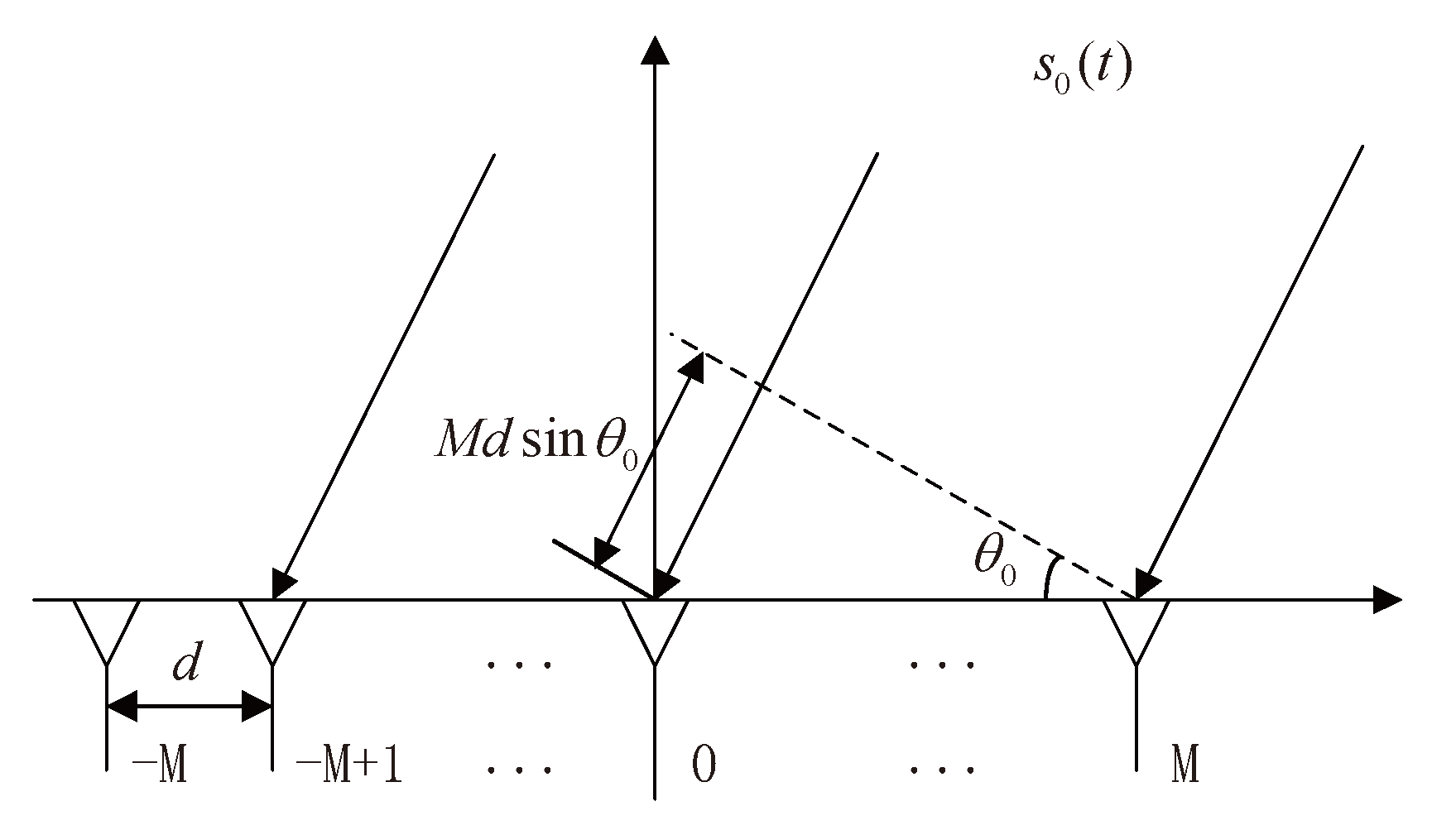
2.1. Array Signal-Receiving Model
2.2. Source Number Determination
2.3. Multi-Label Classification
3. A-CRNN-Based DOA Estimation
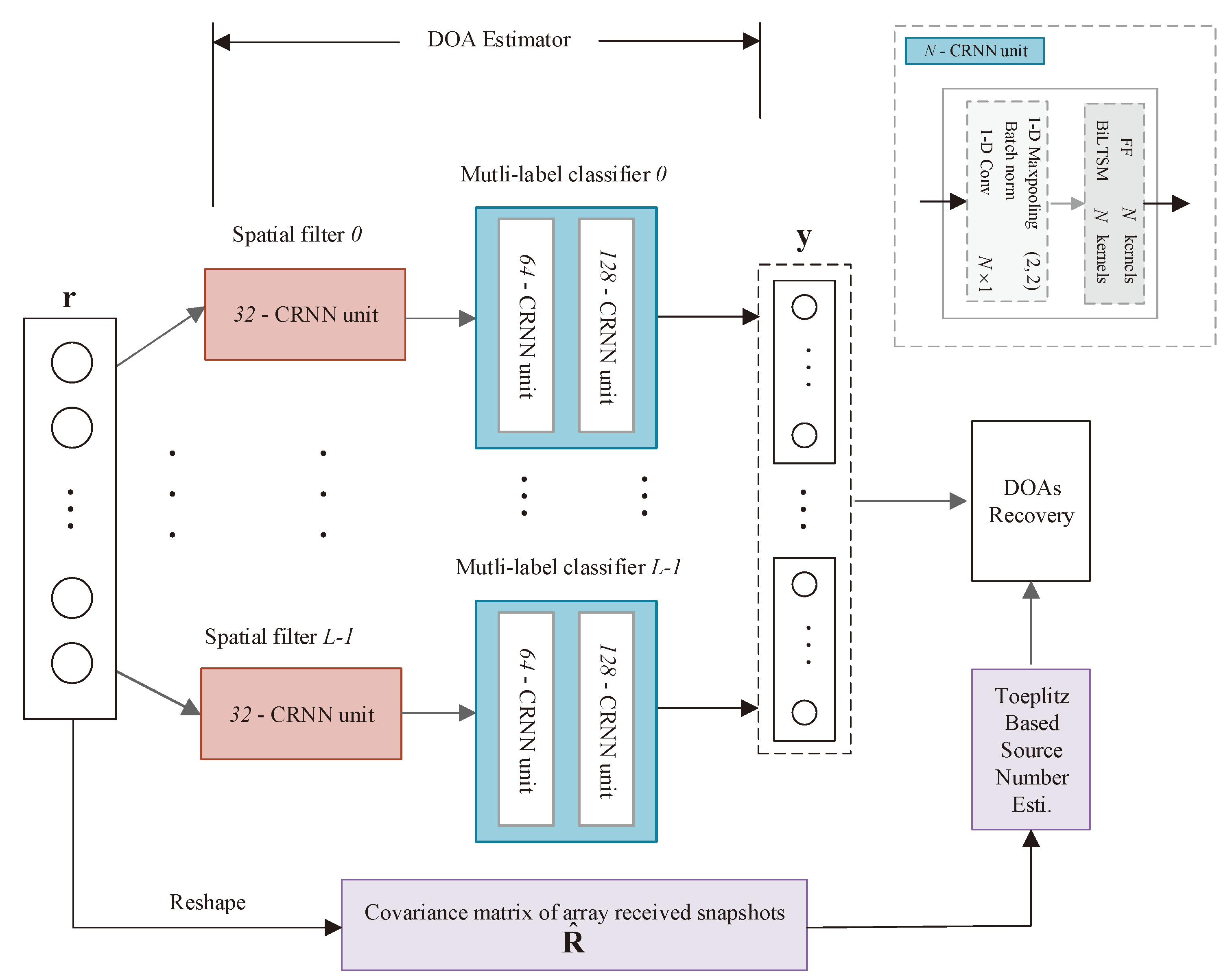
3.1. Network Architecture
3.1.1. Spatial Filters
3.1.2. Multi-Label Classifiers
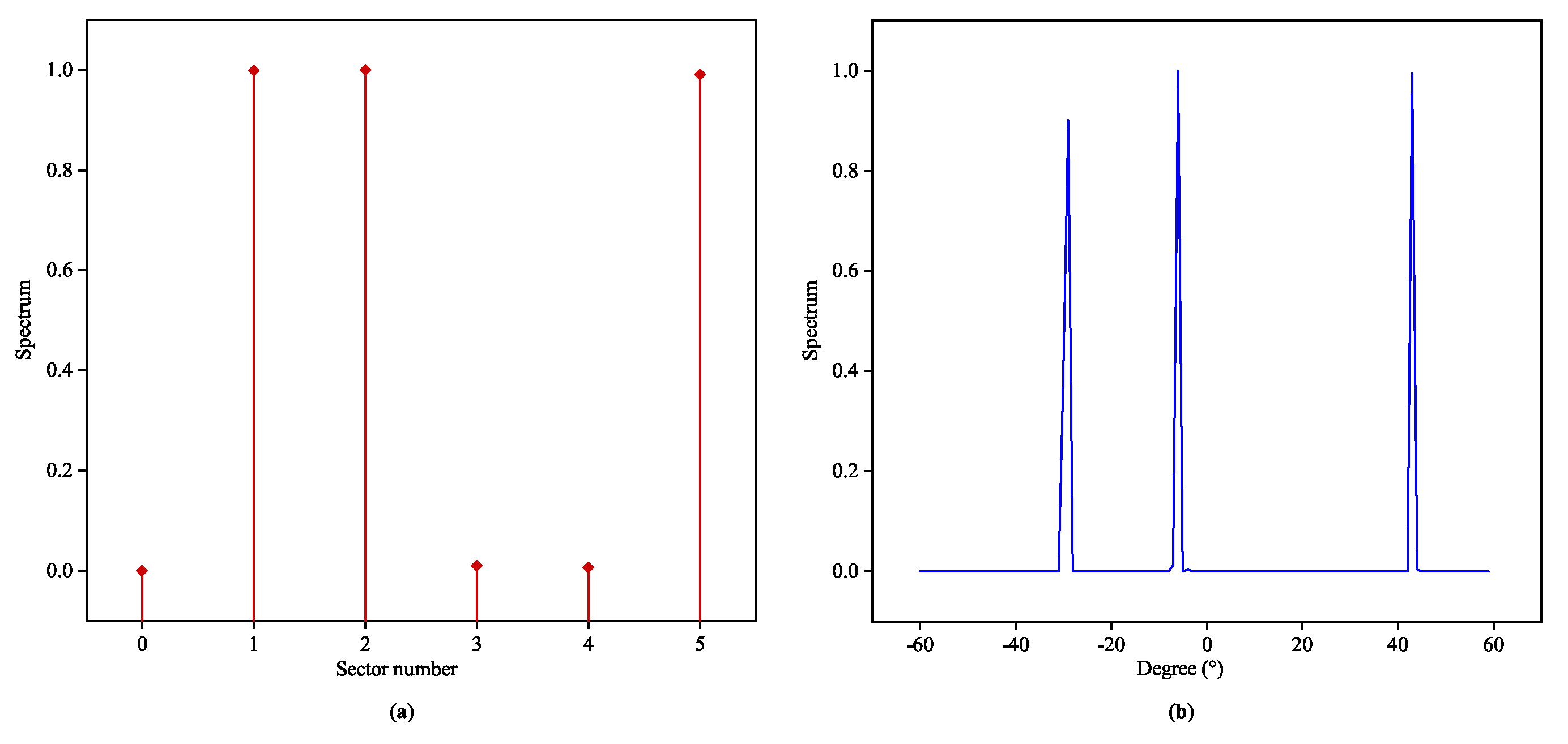
3.2. Global DOA Estimation
4. Simulations and Discussions
4.1. Simulation Settings
4.2. Comparison and Evaluation
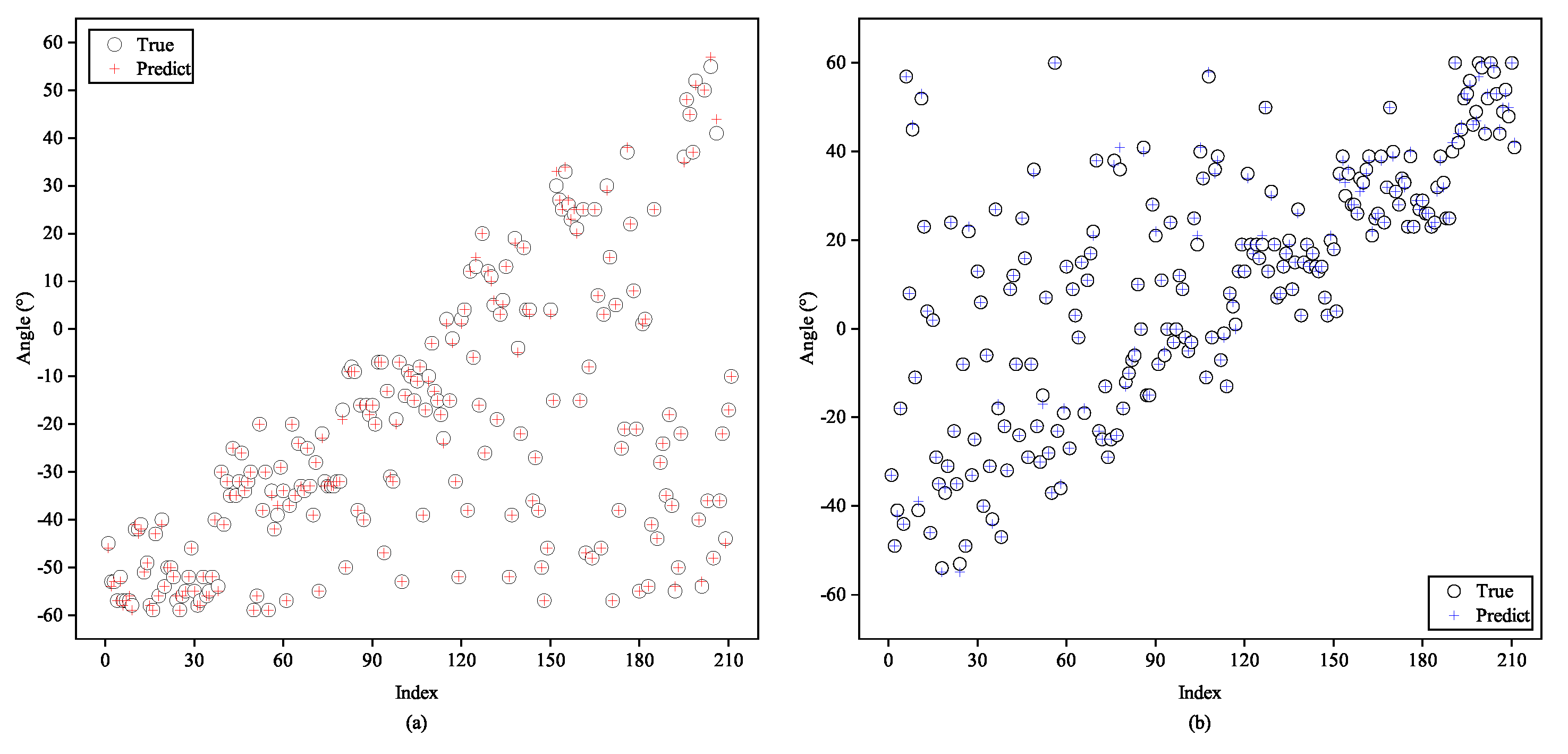
4.2.1. Three-Source Testing under AWGN
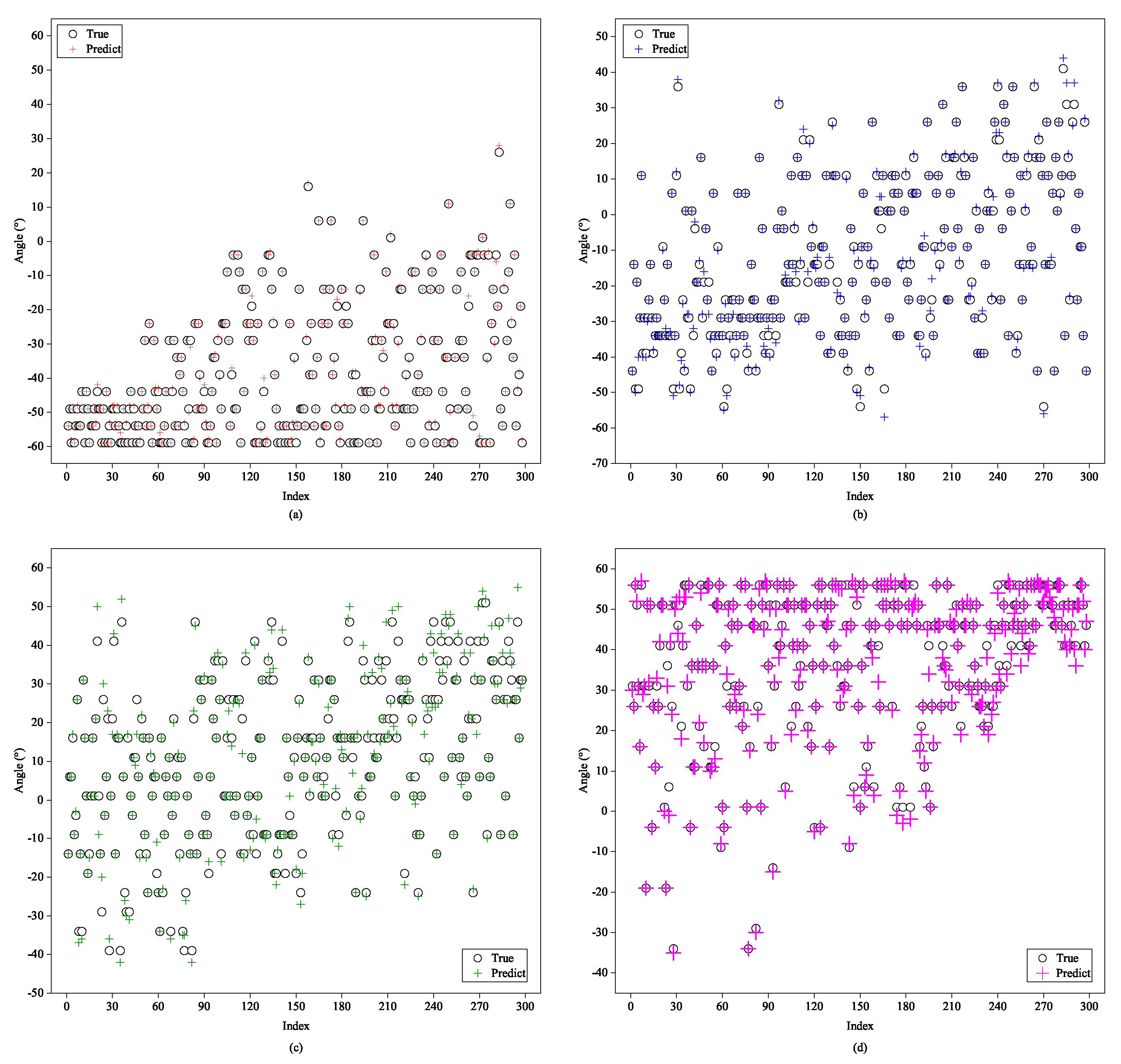
4.2.2. Testing in Untrained Numbers of Source
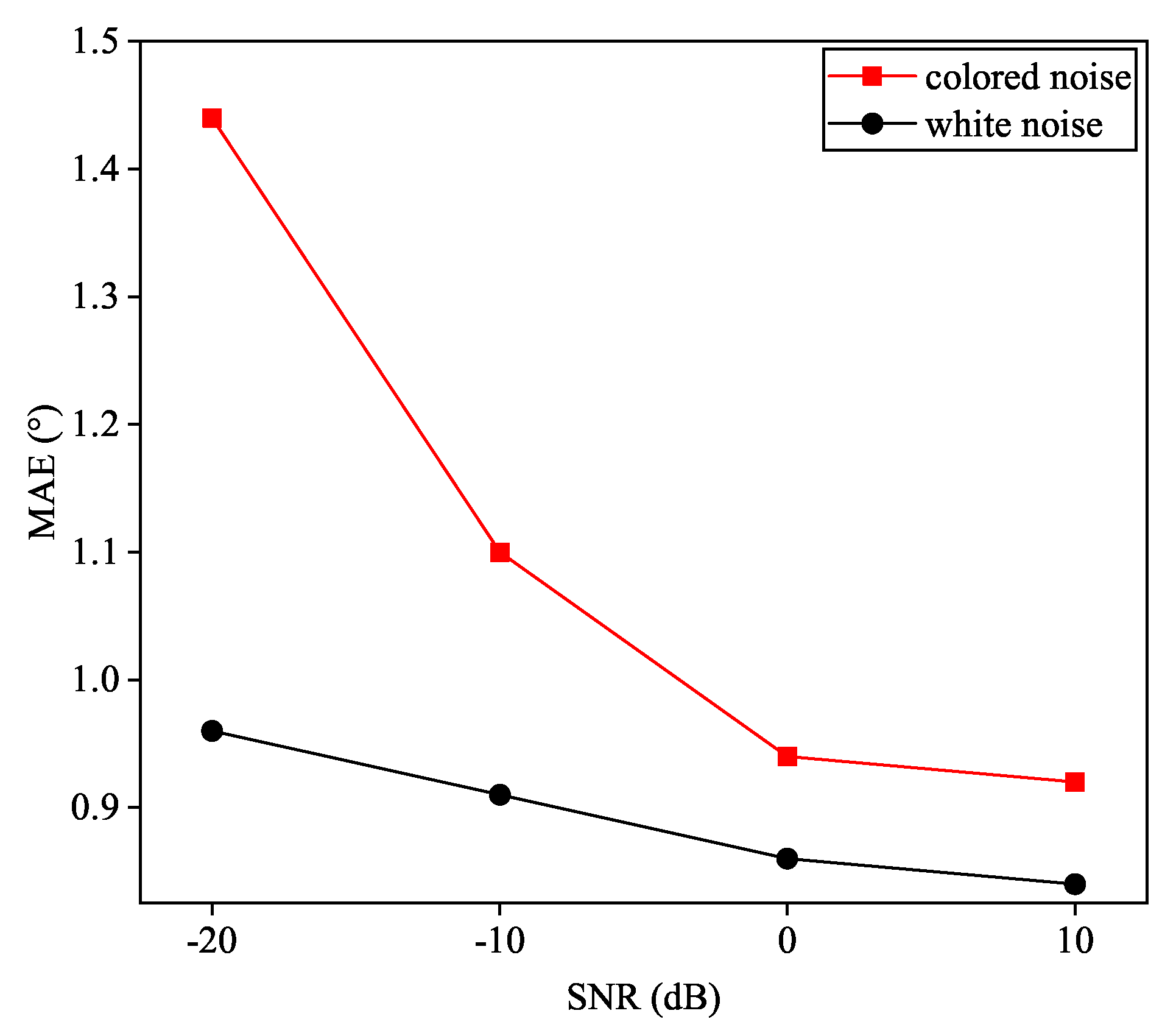
4.2.3. Generalized to Colored Gaussian Noise
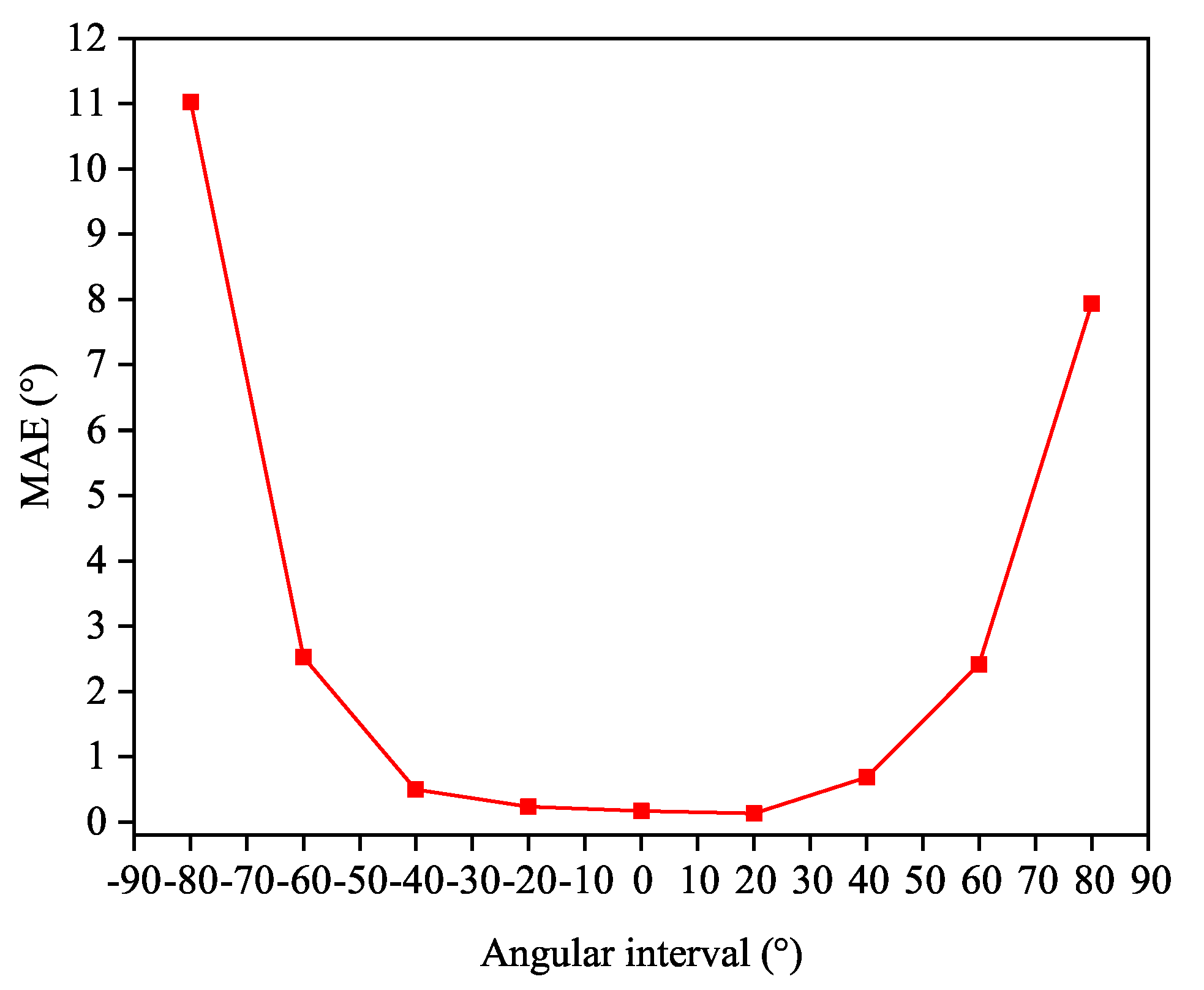
4.3. Discussions
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Krim, H.; Viberg, M. Two decades of array signal processing research: The parametric approach. IEEE Signal Process. Mag. 1996, 13, 67–94. [Google Scholar] [CrossRef]
- Huang, J.; Ma, H.; Jin, J.; Zhang, H. Nonlinear Blind Compensation for Array Signal Processing Application. Sensors 2018, 18, 1286. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kamath, M.A.; Hughes, B.L. The asymptotic capacity of multiple-antenna Rayleigh-fading channels. IEEE Trans. Inf. Theory 2005, 51, 4325–4333. [Google Scholar] [CrossRef]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Ding, Y.; Ren, S.; Chen, Z. A Novel Noncircular MUSIC Algorithm Based on the Concept of the Difference and Sum Coarray. Sensors 2018, 18, 344. [Google Scholar] [CrossRef] [Green Version]
- Ciuonzo, D.; Romano, G.; Solimene, R. Performance Analysis of Time-Reversal MUSIC. IEEE Trans. Signal Process. 2015, 63, 2650–2662. [Google Scholar] [CrossRef]
- Devaney, A.J. Time reversal imaging of obscured targets from multistatic data. IEEE Trans. Antennas Propag. 2005, 53, 1600–1610. [Google Scholar] [CrossRef]
- Li, J.; Li, D.; Jiang, D.; Zhang, X. Extended-Aperture Unitary Root MUSIC-Based DOA Estimation for Coprime Array. IEEE Commun. Lett. 2018, 22, 752–755. [Google Scholar] [CrossRef]
- Ciuonzo, D. On Time-Reversal Imaging by Statistical Testing. IEEE Signal Process. Lett. 2017, 24, 1024–1028. [Google Scholar] [CrossRef] [Green Version]
- Paulraj, A.; Reddy, V.U.; Shan, T.J.; Kailath, T. Performance Analysis of the Music Algorithm with Spatial Smoothing in the Presence of Coherent Sources. In Proceedings of the MILCOM 1986—IEEE Military Communications Conference: Communications-Computers: Teamed for the 90’s, Monterey, CA, USA, 5–9 October 1986; Volume 3, pp. 41.5.1–41.5.5. [Google Scholar]
- Zhou, C.; Gu, Y.; Fan, X.; Shi, Z.; Mao, G.; Zhang, Y.D. Direction-of-Arrival Estimation for Coprime Array via Virtual Array Interpolation. IEEE Trans. Signal Process. 2018, 66, 5956–5971. [Google Scholar] [CrossRef]
- Shi, Z.; Zhou, C.; Gu, Y.; Goodman, N.A.; Qu, F. Source Estimation Using Coprime Array: A Sparse Reconstruction Perspective. IEEE Sens. J. 2017, 17, 755–765. [Google Scholar] [CrossRef]
- Wu, X.; Zhu, W.; Yan, J. A Fast Gridless Covariance Matrix Reconstruction Method for One- and Two-Dimensional Direction-of-Arrival Estimation. IEEE Sens. J. 2017, 17, 4916–4927. [Google Scholar] [CrossRef]
- Pan, J.; Wang, Y.; Le Bastard, C.; Wang, T. DOA Finding with Support Vector Regression Based Forward–Backward Linear Prediction. Sensors 2017, 17, 1225. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- El Zooghby, A.H.; Christodoulou, C.G.; Georgiopoulos, M. Performance of radial-basis function networks for direction of arrival estimation with antenna arrays. IEEE Trans. Antennas Propag. 1997, 45, 1611–1617. [Google Scholar] [CrossRef]
- Perotin, L.; Serizel, R.; Vincent, E.; Guérin, A. CRNN-Based Multiple DoA Estimation Using Acoustic Intensity Features for Ambisonics Recordings. IEEE J. Sel. Topics Signal Process. 2019, 13, 22–33. [Google Scholar] [CrossRef] [Green Version]
- Qian, R.; Yue, Y.; Coenen, F.; Zhang, B. Visual attribute classification using feature selection and convolutional neural network. In Proceedings of the 2016 IEEE 13th International Conference on Signal Processing (ICSP), Chengdu, China, 6–10 November 2016; pp. 649–653. [Google Scholar]
- Graves, A.; Mohamed, A.; Hinton, G. Speech recognition with deep recurrent neural networks. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; pp. 6645–6649. [Google Scholar]
- Liu, Z.; Zhang, C.; Yu, P.S. Direction-of-Arrival Estimation Based on Deep Neural Networks With Robustness to Array Imperfections. IEEE Trans. Antennas Propag. 2018, 66, 7315–7327. [Google Scholar] [CrossRef]
- Lipton, Z.C. A Critical Review of Recurrent Neural Networks for Sequence Learning. arXiv 2015, arXiv:1506.00019. [Google Scholar]
- Xia, H.; Yang, K.; Ma, Y.; Wang, Y.; Liu, Y. A Noise Removal Method for Uniform Circular Arrays in Complex Underwater Noise Environments with Low SNR. Sensors 2017, 17, 1345. [Google Scholar] [CrossRef] [Green Version]
- Lin, T.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal Loss for Dense Object Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 318–327. [Google Scholar] [CrossRef] [Green Version]
- Dembczyński, K.; Waegeman, W.; Cheng, W.; Hüllermeier, E. On label dependence and loss minimization in multi-label classification. Mach. Learn. 2012, 88, 5–45. [Google Scholar] [CrossRef] [Green Version]
- Han, F.-M.; Zhang, X.-D. An ESPRIT-like algorithm for coherent DOA estimation. IEEE Antennas Wirel. Propag. Lett. 2005, 4, 443–446. [Google Scholar]
- Mangal, S.; Joshi, P.; Modak, R. LSTM vs. GRU vs. Bidirectional RNN for script generation. arXiv 2019, arXiv:1908.04332. [Google Scholar]
- Kay, S.M. Fundamentals of Statistical Signal Processing; Prentice Hall: Harlow, UK, 1993; pp. 57–59. [Google Scholar]
- Buda, M.; Maki, A.; Mazurowski, M. A systematic study of the class imbalance problem in convolutional neural networks. Neural Netw. 2017, 106, 249–259. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Charte, F.; Rivera, A.J.; del Jesus, M.J.; Herrera, F. REMEDIAL-HwR: Tackling multilabel imbalance through label decoupling and data resampling hybridization. Neurocomputing 2019, 326–327, 110–122. [Google Scholar] [CrossRef] [Green Version]
- Bradley, A.P. The use of the area under the ROC curve in the evaluation of machine learning algorithms. Pattern Recognit. 1997, 30, 1145–1159. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.F.; Zhu, X.L.; Zhang, X.D. A New Algorithm for Joint Range-DOA-Frequency Estimation of Near-Field Sources. EURASIP J. Adv. Signal Process. 2004, 2004, 105173. [Google Scholar] [CrossRef] [Green Version]
- Stoeckle, C.; Munir, J.; Mezghani, A.; Nossek, J.A. DoA Estimation Performance and Computational Complexity of Subspace- and Compressed Sensing-based Methods. In Proceedings of the WSA 2015, 19th International ITG Workshop on Smart Antennas, Ilmenau, Germany, 3–5 March 2015; pp. 1–6. [Google Scholar]
- Aceto, G.; Ciuonzo, D.; Montieri, A.; Pescapè, A. MIMETIC: Mobile encrypted traffic classification using multimodal deep learning. Comput. Netw. 2019, 165, 106944. [Google Scholar] [CrossRef]
- Zhu, W.; Zhang, M. A Deep Learning Architecture for Broadband DOA Estimation. In Proceedings of the 2019 IEEE 19th International Conference on Communication Technology (ICCT), Xi’an, China, 16–19 October 2019; pp. 244–247. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Value |
|---|---|---|
| number of array sensors | 11 | |
| angular range | ||
| angular resolution | 1° | |
| L | number of sectors | 6 |
| S | number of snapshots | 100 |
| Item | Spatial Filter | Multi-Label Classifier |
|---|---|---|
| network sturcture | 32-CRNN unit | 128-CRNN unit |
| -CRNN unit | ||
| loss function | binary-crossentropy | |
| epochs | 50 | 100 |
| noise-signal ratio | 20 dB | |
| size of mini-batch | 50 | |
| regularization | -norm | |
| optimizer | Adam | |
| Absolute Error | Operation Time | ||||
|---|---|---|---|---|---|
| Models | <1° | <4° | <7° | <10° | (s) |
| FC-NN | 27.29% | 46.03% | 49.44% | 51.16% | 0.00049 |
| SS-MUSIC | 82.17% | 82.41% | 83.05% | 87.36% | 0.0049 |
| A-CRNN | 87.39% | 89.14% | 90.35% | 91.38% | 0.0012 |
| Toeplitz A-CRNN (GRU) | 93.90% | 96.06% | 96.85% | 97.30% | 0.0010 |
| Toeplitz A-CRNN (proposed) | 95.77% | 97.58% | 98.15% | 98.46% | 0.0012 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, Y.; Lei, H.; He, W. A-CRNN-Based Method for Coherent DOA Estimation with Unknown Source Number. Sensors 2020, 20, 2296. https://doi.org/10.3390/s20082296
Yao Y, Lei H, He W. A-CRNN-Based Method for Coherent DOA Estimation with Unknown Source Number. Sensors. 2020; 20(8):2296. https://doi.org/10.3390/s20082296
Chicago/Turabian StyleYao, Yuanyuan, Hong Lei, and Wenjing He. 2020. "A-CRNN-Based Method for Coherent DOA Estimation with Unknown Source Number" Sensors 20, no. 8: 2296. https://doi.org/10.3390/s20082296
APA StyleYao, Y., Lei, H., & He, W. (2020). A-CRNN-Based Method for Coherent DOA Estimation with Unknown Source Number. Sensors, 20(8), 2296. https://doi.org/10.3390/s20082296