1. Introduction
The olive (
Olea europaea L.) tree has traditionally been cultivated in low-density orchards under rainfed conditions due to the drought tolerance capacity of this evergreen species [
1]. However, growth and yield may be affected by the decrease in the photosynthetic rate of olive cultivars under rainfed conditions [
2]. Since the 1970s there has been a steady increase in the land area occupied by irrigated olive orchards, which was accelerated by the appearance of super-high density plantations (SHD, 1500–2000 trees/ha) in the 1990s. The main advantage of highly mechanized SHD systems is the reduction in labor costs during pruning and harvesting. However, such systems require specific agronomic techniques and are very costly to set up [
3]. Irrigation is very important in SHD olive groves to ensure high productivity, as the trees have a limited root volume, a high leaf area index and, in consequence, high water demands [
4,
5]. However, the application of excessive amounts of water can lead to uncontrolled vigor, the need for severe pruning to adapt the hedgerow to the operation of the mechanical harvester, and low lighting in the fruiting areas, producing an imbalance between growth and productivity [
6].
Furthermore, water is a scarce resource [
7]. According to the Food and Agriculture Organization (FAO) of the United Nations, agriculture is responsible for over 70% of worldwide water consumption, and it is estimated that the amounts used for irrigation will rise by 14% in the next 10 years [
8]. Therefore, to cope with water scarcity and to improve the profitability of SHD olive groves, water savings irrigation strategies must be used in order to control hedgerow vigor, as canopies with greater productive efficiency are key to increasing the viability of these systems [
9]. RDI is a management strategy that imposes water deficits in phenological stages less sensitive to drought in order to restrain vegetative growth while not negatively impacting yield and fruit quality [
10,
11]. The phenological stage that is least sensitive to water deficit in the olive tree is the period from pit hardening to veraison [
12,
13].
Irrigation scheduling requires decision-making with respect to when and how much irrigation should be applied according to crop type, crop development and environmental conditions. The soil water balance (WB) method is widely used to determine the irrigation needs of a crop, where the water inputs to the soil-plant system must be balanced with the expected outputs. The most important component of the WB is the crop evapotranspiration (ETc) value, which is the crop water need that considers both evaporation from the soil and transpiration from the plants. The ETc is estimated as the product of the evapotranspiration of a reference crop (ETo) and a crop coefficient, Kc, in the form ETc = ETo × Kc [
14]. In this relationship, ETo represents the demand imposed by the meteorological conditions while Kc integrates the physical and biophysical differences between the reference crop and the crop which is to be estimated for evapotranspiration [
14]. Irrigation scheduling based on WB presents the advantage of anticipating crop water requirements at certain times during the growing season and the possibility of planning irrigation accordingly [
15]. However, this method presents the disadvantage that predicted ETc values could be inaccurate because of changes in annual weather patterns and differences in the production practices for which the Kc was developed [
16]. An alternative to the WB-based method is to use soil moisture sensors to help plan irrigation scheduling. This method considers the soil as a water reserve for plant growth, and the idea is to ensure the reserve always has a sufficient amount of water available to the plant. Irrigation control is based on the monitoring and measurements of soil water content or water potential. Various types of these sensors have been used to determine soil water content [
17]. In addition to the problem of having to weigh up the pros and cons of the different sensor types, the appropriate placement of sensors to accurately reflect the conditions experienced by the plant can be challenging [
18]. Consideration needs to be given to the fact that soil water content patterns in the root zone are dynamic and influenced by soil hydraulic properties, spatial heterogeneity, crop characteristics and the irrigation system, among others. In drip irrigation, the local application of irrigation water results in even higher spatial variability in the soil water content patterns formed under the emitters [
19]. In general, given the benefits and drawbacks of the WB-based and soil water content monitoring methods, combining both approaches seems the best way in the future to improve irrigation efficiency in agricultural systems: i.e., determine the irrigation dose from a WB model and then adapt that dosage through the use of sensors to the real situation of each plot. For this purpose, an interactive software-based decision support system (DSS) can be used to help decision-makers compile useful information from a combination of raw data, documents and personal knowledge. This information can then be deployed to identify and solve problems, and make optimized decisions. The simplest DSS designed to carry out automated irrigation consists of activating or deactivating irrigation when the sensor measurements are above or below predefined threshold values [
15,
20,
21,
22,
23]. A more complex proposal is a DSS which combines the WB method with soil or plant sensors to readjust the ETc [
24,
25,
26,
27]. Millán et al. [
28] used a DSS that executed a pre-established irrigation scheduling in which RDI was applied without human intervention in a plum crop.
One aspect that complicates the efficient irrigation management of crops is plot heterogeneity, which depends on factors such as plot size, soil characteristics, orography, previous plot uses, etc. If the problem of soil spatial variability is not taken into account, an irrigation design may not be efficient [
29]. Work on experimental plots rarely addresses these problems, which require the use of specialist tools to characterize spatial variability. Remote sensing and soil mapping are tools that can be used for agronomic crop management, allowing characterization of the development of the vegetation cover and the large-scale water status of the crop. Very interesting results have been obtained for olive groves with such tools [
30]. Using data related to the electrical properties of the soil and multispectral images, easily available at high resolution, can be the best option to delineate different homogeneous zones. For instance, Pedrera-Parrilla et al. [
31] and Moral et al. [
32] used soil electrical data for zoning purposes, and Hall and Wilson [
33] and Martínez-Casanovas et al. [
34] utilized vegetation indices computed from multispectral images. The use of satellite data to evaluate changes in vegetation properties aimed at applications in precision agriculture has also been investigated [
35,
36]. Coarse resolution satellite images are useful tools to describe the phenology of the vegetation [
37]. Crop monitoring offers direct information for the analysis of the spatial variability of the crop area. On the basis of such information management actions can be taken to improve production practices. The information can be used to adjust and direct fertilization, determine crop development, adapt irrigation to the needs of the crop, and schedule the harvest. One way to determine crop development is based on the use of reflectance measurements, which differ depending on the type of surface and, in the case of plants, the species, cultivar, and plant status [
38]. From this information, the normalized difference vegetation index (NDVI) can be computed (ratio of the difference of the values of reflectance in the near infrared and red bands and their sum). It is known that NDVI is a good indicator of the state of development of vegetation and, in consequence, can be used to detect canopy differences within a field [
39].
The objectives of this study were to test the technical feasibility and to evaluate the productive response of a heterogeneous plot in an SHD olive grove cv. ‘Arbequina’ when using a DSS to carry out a fully automated irrigation scheduling and implementing RDI strategies based on the information obtained through remote sensing and soil monitoring.
2. Materials and Methods
2.1. Site Description and Experimental Design
This work was performed over the course of three years (2015–2017) in a 9.31 ha commercial hedgerow olive grove (Olea europaea L.) planted with cv. ‘Arbequina’. The farm is located in the municipality of Alvarado, about 16 km east of Badajoz in southwestern Spain (38°49′27.15″ N, 6°46′ 18.39″ W, datum WGS84). The trees were planted in autumn 2007 at a density of 1.852 olive trees/ha (4 × 1.35 m), with a north-south orientation and trained to a central axis. The predominant soil in this field was classified as a Haplic Fluvisol according to the FAO (2006). Soil maintenance involved the practice of non-tillage and the application of herbicides to ensure it remained free of weeds. The climate of the area is Mediterranean with a mild Atlantic influence, with a dry season from June to September (summer) and a wet season from October to May (winter) in which 80% of total precipitation falls. Average ETo and precipitation p-values in the area were 1188.25 mm and 503.56 mm, respectively, for the 2007–2017 period. For the same period, the average maximum and minimum air temperature values were 23.49 °C and 9.56 °C, respectively. The hottest months are July and August. Maximum temperatures of over 40 °C are recorded nearly every year, with peak values rarely over 45 °C. The coolest months are December and January. Temperatures below 0 °C are recorded every year, with minimum values rarely below −5 °C. The meteorological information was obtained from a weather station located in the same study plot at a height of 3 m above ground level (in line with a tree row).
Trees were irrigated daily using a drip system with a single lateral line per tree row located close to the base of the tree, with pressure-compensating drippers spaced at 0.67 m and with 1.6 L h
−¹ discharge rates. The plot is described in more detail in Millán et al. [
40].
2.2. Characterization of Spatial Variability of the Plot, Selection of Control Points and Soil Analysis
One very important aspect, which complicates the efficient irrigation management of crops, is plot heterogeneity. When establishing an automatic irrigation system it is, therefore, important to know the spatial variation in soil and crop development. A satellite image and a Dualem-1S non-contact sensor (Dualem, Inc., Milton, ON, Canada) were used to evaluate the heterogeneity of the plot. The NDVI measurement was provided by the Sentinel-2A (European Space Agency, ESA) satellite with an image taken in August of 2015 with no cloud cover. The image was processed and analyzed in QGIS 2.18 (
https://www.qgis.org) using DOS1 atmospheric correction.
The Dualem-1S sensor was used to measure apparent electrical conductivity (ECa) and was equipped with a global positioning system (GPS) antenna. The sensor comprised a transmitter operating at a frequency of 9 kHz and two receivers with different orientations. There was a 1 m separation between the transmitter (Tx) and the two receivers (Rx). The ECa was measured at 0–0.50 m and 0–1.50 m depths. The sensor was introduced into a 3 m long polyvinyl chloride (PVC) structure which was transported by a pickup truck traveling at an average speed of 9 km h−¹. Due to the height of the vehicle, ECa readings were carried out of the 0–0.40 m and 0–1.40 m soil layers, assuming that the ECa of the air is zero. In this study, we used the ECa measurements of the top layer (0–0.40 m). The ECa measurements were taken in August 2015 along different parallel transects that were approximately 4 m apart. The Dualem-1S was programmed to register measurements each second, and a total of 3313 ECa measurements were obtained in the plot. Ordinary kriging was used to develop the ECa map.
Figure 1a shows the soil ECa map and
Figure 1b the NDVI map. ECa is related to different soil characteristics that directly or indirectly influence the availability of water for cultivation. The map was made in August when the water content was mostly from irrigation. These served as the basis for determining the control points in the study plot. As seen in
Figure 1a, the values classified as low, medium and high (because the ECa values may change with different water contents in the plot) allowed identification of areas with different ECa values in the plot. The highest ECa values were found in the southwestern, northwestern and eastern areas of the experimental field, corresponding to a higher water retention capacity. Soil texture was one of variables considered in the geostatistical analysis for identifying the management zones in the plot [
40]. Analysis of the satellite image (
Figure 1b) allowed identification of the areas with highest and lowest canopy crop development. The NDVI showed the highest values to be in the northern and central areas of the field. These intra-field ECa and vigor differences are due to a complex interaction of biological, agronomic, edaphic, anthropogenic, topographic and climatic factors [
32].
With the information obtained from
Figure 1a,b, a new map was generated (
Figure 1c) using the map algebra tool (raster calculator) in QGIS 2.18. As can be seen in
Figure 1c, three different zones were established:
Zone 1 (T1): where the ECa and NDVI values were medium or high. The sampling points 1 and 2 were found in this zone.
Zone 2 (T2): where the ECa and NDVI values were low. The sampling points 3 and 4 were found in this zone.
Zone 3 (CR): where the ECa values were low and the NDVI values were medium or high. The sampling control points CR1, CR2, CR3 and CR4 were found in this zone.
The maps made during the first year served as a basis to establish in the following seasons in situ control areas. Each control area consisted of 3 rows of 6 trees each. The various measurements that were subsequently taken were made in the 4 central trees of each control area.
The DSS-managed automatic irrigation system was established in Zone 3. This had the most unfavorable conditions for the hedgerow olive grove and corresponded to places with medium or high vigor and low ECa values. In this zone, three control points were selected CR1, CR2, CR3 (2016 and 2017) (
Figure 1) and in 2017 one more control point, CR4 (
Figure 1), was added to check the system in different soil and crop conditions
Zones 1 and 2 were used to compare the irrigation scheduling carried out in Zone 3. These two first zones were irrigated according to the expert technical criteria. In both zones, two sampling points were selected, in Zone 1 (T1) points 1 and 2, and in Zone 2 (T2) points 3 and 4 (
Figure 1). At these points, irrigation volumes were recorded daily using digital water meters (CZ2000-3M, Contazara, Zaragoza, Spain).
Table 1 shows the soil properties in the study area. Soil samples were collected on 15 November 2015 at the different control points whose coordinates were determined using a Mesa-Geode positioning system (Juniper Systems, Logan, UT, USA) at two depths: at 0.0–0.30 m and at 0.30–0.60 m. All soil samples were transported to the lab in plastic bags and were air-dried, ground, and passed through a 2 mm sieve. The soil was characterized in terms of texture, pH and organic matter (OM). Soil texture was determined by mechanical analysis with the hydrometer method [
41], pH was measured in a 1:2.5 (soil: water) suspension using the potentiometric method [
42] and OM was determined by dichromate oxidation [
43].
2.3. Decision Support System (DSS)
In order to carry out the automatic irrigation, the DSS comprised two components: (a) sensors installed in the field and (b) IRRIX, a web platform whose algorithm is based on a combination of the water balance with soil moisture sensor feedback adjustment mechanisms.
- (a)
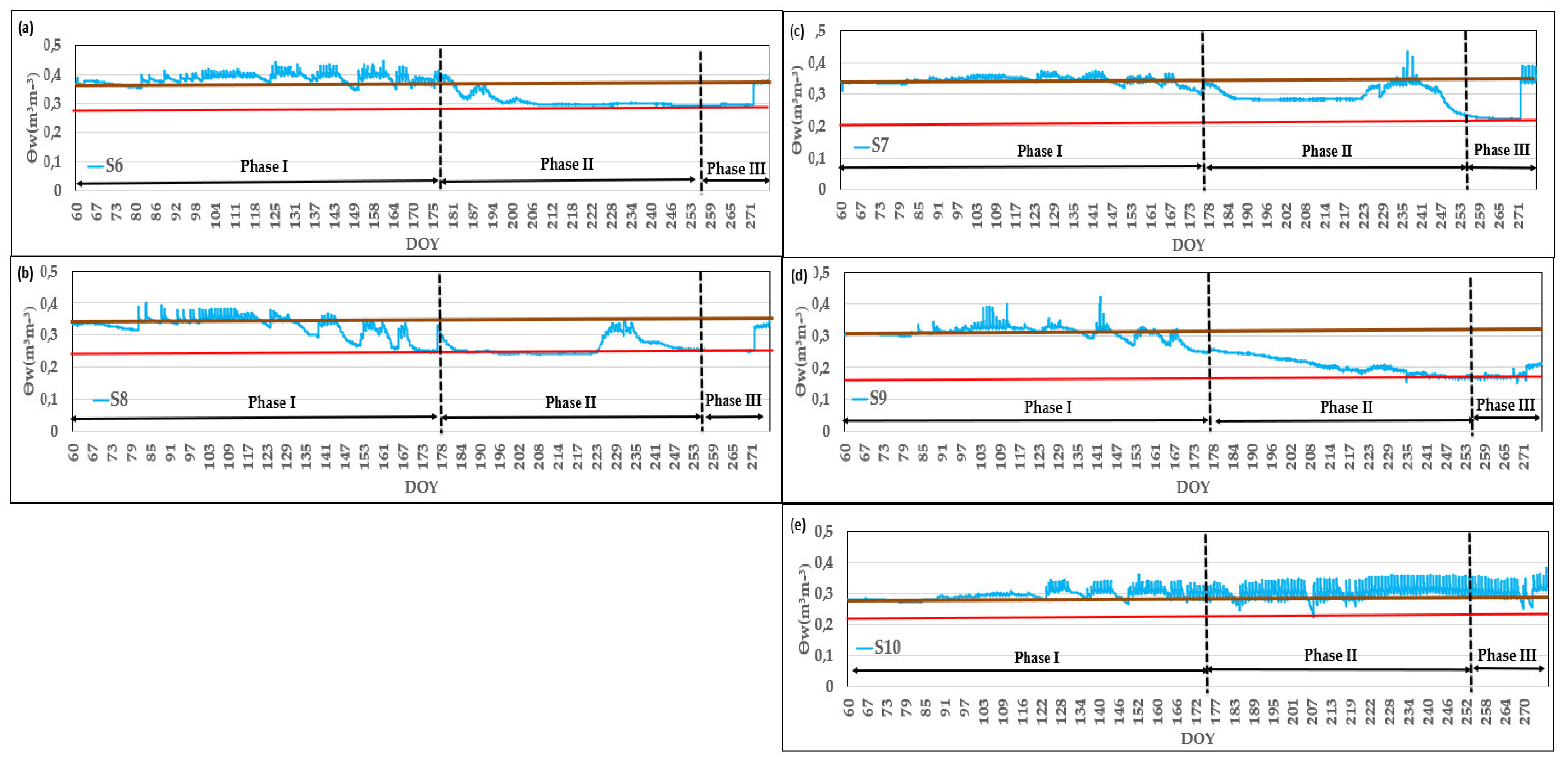
Sensors installed in the field: to monitor the soil moisture, 10 HS capacitive moisture sensors (Decagon Devices Inc., Pullman, WA, USA) were installed at different positions (position A and position B) (
Figure 2) in the different control points selected (CR1, CR2, CR3 and CR4). Two drippers were monitored at each control point. Four moisture sensors were placed under each dripper in the position A, two at a depth of 0.30 m and the others at a depth of 0.60 m. In addition, one measure sensor was situated between the two drippers in the position B at a depth of 0.30 m (
Figure 2). These 5 moisture sensors were installed in each of the control points (CR1, CR2 and CR3) in 2016, making a total of 15 sensors. In 2017, the number of soil moisture sensors was increased from 15 to 20, as a new control point was added (CR4). When an error was detected in any of the sensors that had been installed, that sensor was automatically replaced with another in the same position.
A solenoid valve (Rain Bird Europe SCN, Aix-en-Provence, France) and pulse water meter (Lab-Ferrer S.L., Cervera, Lleida, Spain) were also installed at each control point to measure and monitor each irrigation event. An air temperature sensor (CS2015, Campbell Scientific Inc., Logan, UT, USA) was also installed in a central point of the zone. All sensors were connected to a datalogger (CR1000, Campbell Scientific Inc., Logan, UT, USA) via cables. In addition, a voltage regulator (BlueSolar PWM-Pro, Vitron Energy BluePower, The Netherlands) and a relay module (SMD-CD16AC, Campbell Scientific Inc., Logan, UT, USA) were also connected to the datalogger to control the opening and closing of the solenoid valves according to the programming established by the system. The program used in the datalogger was written in CR Basic (Campbell Scientific Inc., Logan, UT, USA) and implemented the functionalities of an irrigation automata. All data were stored each 5 min. The data was downloaded to an IRRIX server four times a day.
The distance between the different control points for automatic irrigation was limited by the maximum possible cable distance to maintain the electrical signal with sufficient quality. With this limitation, it was decided to locate the control points in the same area, the most disadvantaged one, which required more precise control of the irrigation (sandier texture and more vigorous trees).
- (b)
IRRIX is a cloud-hosted web platform that carries out the following daily tasks:
Data collection of sensors installed in the field (
Figure 3). IRRIX downloads sensor data at periodic intervals throughout the day and at the user’s request.
Analysis of all data and calculation of irrigation water volumes. Once a day, IRRIX analyses the set of data to determine the irrigation dose using the information provided by the moisture sensors. To achieve this, this tool integrates an algorithm which combines a WB-based estimation of crop water needs (feed-forward control) with readjustment based on sensor readings (feedback control). [
25,
28,
44]
Irrigation scheduling. IRRIX sends the updated irrigation doses to the datalogger. Then, this device orders the activation of the rest of the equipment (solenoid valve or pumps, etc.) to apply the required irrigation doses.
Interaction with users. IRRIX is an autonomous system whose main objective is to free the user from work. The main function of the user is to check that the system has worked correctly. Logically, if there is any anomaly in the system it has to be resolved by the user.
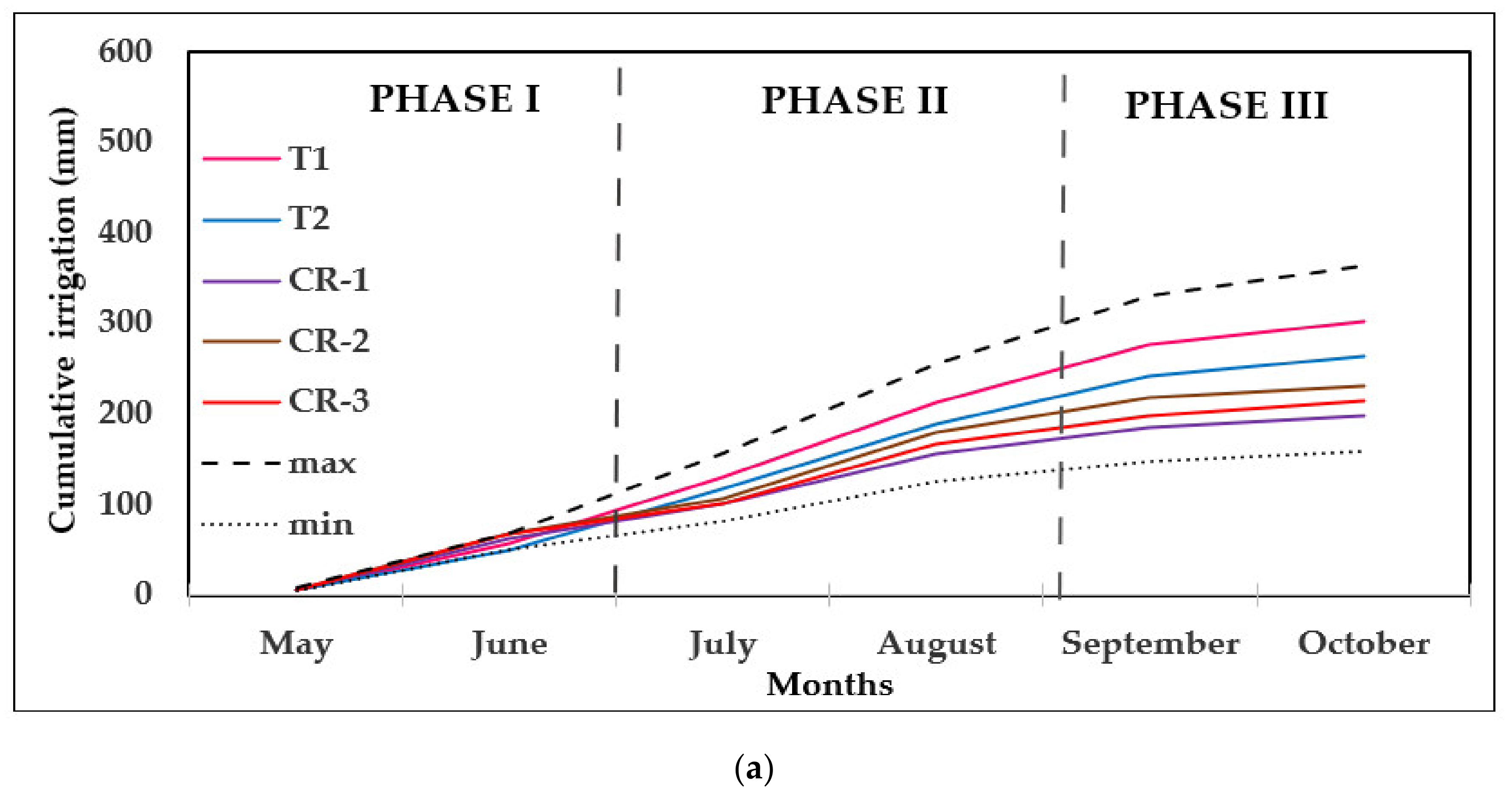
Before starting the irrigation campaign, the user must input to IRRIX a plan that provides a rough estimation of how the water will be distributed throughout the campaign. This seasonal plan is drawn up by an expert who determines the guidelines that the irrigation must follow, in this case taking into account the deficit periods. This plan represents the cumulative irrigation water amount throughout the campaign. In order to adapt to the conditions of each year, upper and lower limits are set to this baseline. For this, a set of curves has to be defined, with the automated control system positioned between those curves in such a way that the system must be between a maximum and a minimum cumulative irrigation value.
2.4. Irrigation Scheduling
The irrigation carried out on the plot in the different years was the following:
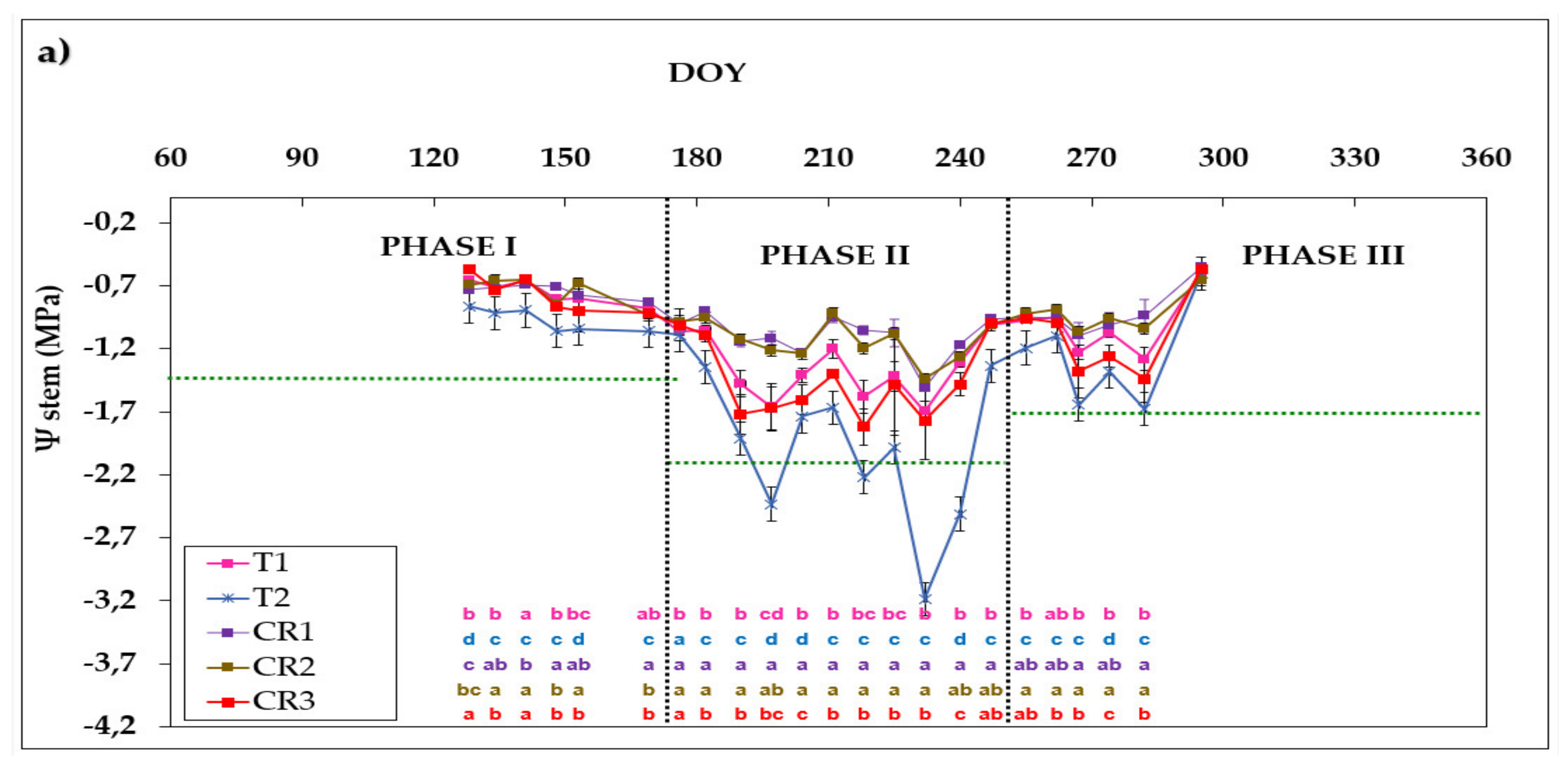
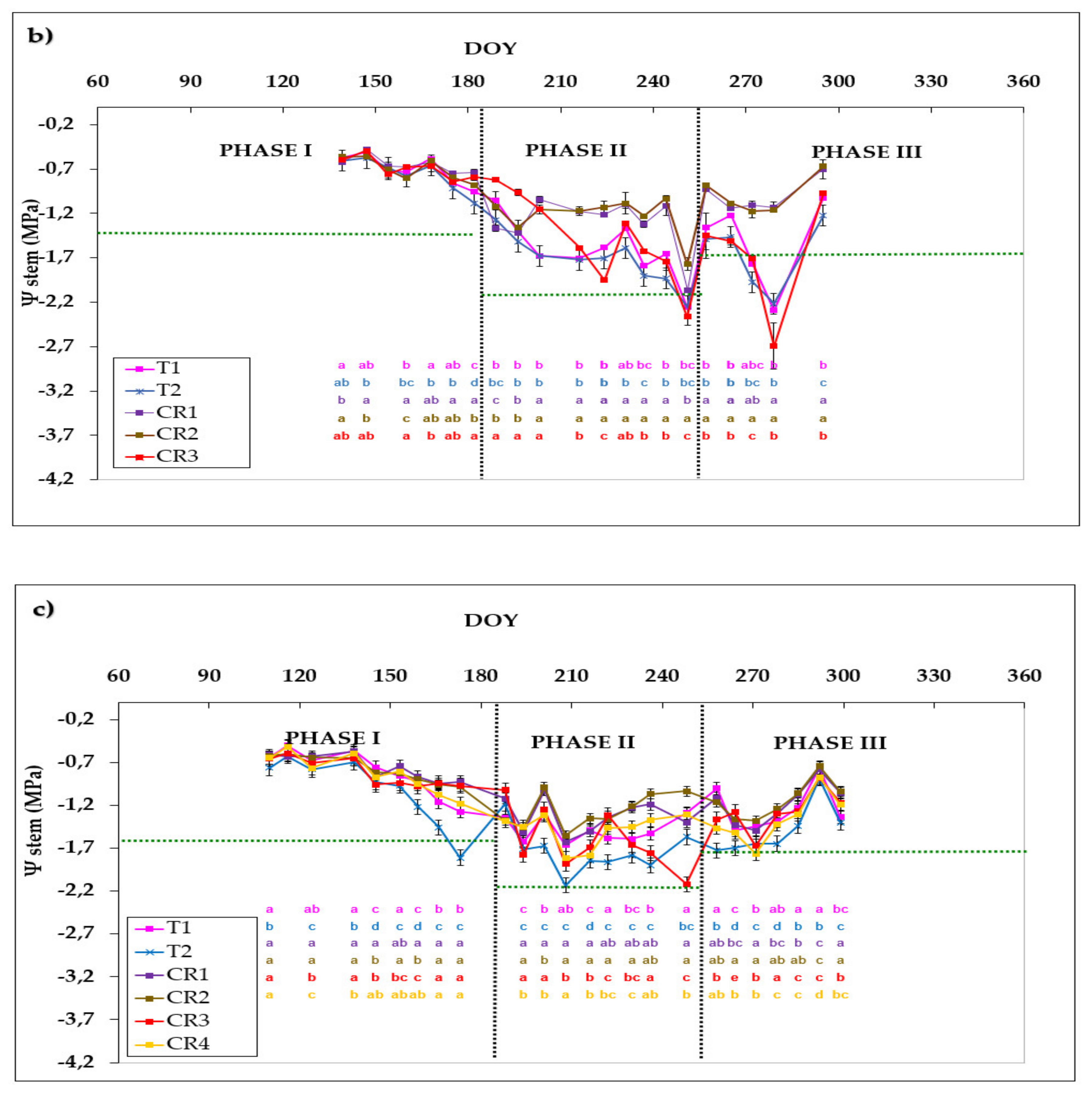
Irrigation scheduling was adjusted according to measurements of midday stem water potential (Ψstem) made in T1 and T2:
- ○
Phase I, from sprouting (early in March) until the beginning of the olive pit hardening stage (beginning of July) [
45]. The threshold established for Phase I was −1.4 MPa [
12], which means the implementation of only a slight water deficit.
- ○
Phase II, from the beginning of the hardening of olive pit until the beginning of veraison (mid-September) [
45]. The threshold established for Phase II was −2.0 MPa [
12].
- ○
Phase III, from the end of Phase II until harvest [
45]. The threshold established for Phase III was −1.6 MPa [
12].
For T1 and T2, the ETo was calculated according to the formula of Penman and Monteith [
14], modified using the data obtained through an external meteorological network (REDAREX,
http://redarexplus.gobex.es), and weekly Ψ
stem measurements were used to adjust irrigation.
In the case of CR1, CR2 and CR3, the ETo was estimated daily from the air temperature sensor using the Hargreaves equation [
46] and Ψ
stem values were not used to adjust irrigation. To carry out irrigation at these points through the DSS, the olive irrigation expert [
45] provided a modified Kc (Kc mod.) that took into account the deficit irrigation strategy. This Kc mod., which has to be introduced into IRRIX at the beginning of the irrigation campaign (
Figure 4) for the preparation of the seasonal plan, was established on the basis of technical experience in the same plot with a view to attaining the target Ψ
stem for each of the previously described phases. At the CR1, CR2 and CR3 points, irrigation scheduling was carried out independently and aimed to simulate the irrigation that was carried out in T1 and T2.
In 2017, irrigation scheduling was similar to that of the previous year, but one more control point was added (CR4) where automatic irrigation was also carried out. As in the other CR points, the CR4 irrigation scheduling was carried out independently. The CR1 and CR2 automatic irrigation scheduling was carried out in the DSS on the basis of the information provided by the sensors located in CR2. In accordance with the evolution of Ψstem, a series of adjustments were made in 2017 in relation to the seasonal plan (due to the fact that this year was unusually dry) and the soil comfort zone in relation to the sensor readings. This soil comfort zone specifies to the control system the acceptable range for the soil moisture sensor measurements and their pre-established boundaries were empirically readjusted to fit with the observed range.
A summary of the irrigation scheduling followed in this study is shown in
Table 2.
2.5. Physiological and Agronomic Measurements
2.5.1. Water Status and Canopy Volume
The Ψ
stem was measured once a week with a pressure chamber (Model 3005, Soil Moisture Equipment Corp., Santa Barbara, CA, USA). One shaded-leaf per tree was selected near the base of the trunk and covered with aluminum foil at least two hours before the measurements [
48]. This selection was carried out between 12:00 and 13:00 h solar time. Determinations were made in four trees per control point. The average Ψ
stem value was used to calculate the irrigation correction in T1 and T2. This average was compared with the threshold value and the deviation was calculated.
2.5.2. Yield Data and Oil Content
In 2015, yield measurements were made for the T1, T2, CR1, CR2 and CR3 sampling points. The yield control points were increased by one (CR4) in 2017. At each control point, 4 olive trees were hand harvested when the trees reached a maturity index (MI) of approximately 2.5. A weekly sampling was carried out in every control point from the beginning of veraison. On each occasion, a sample of one hundred olives was classified in eight color groups, and the MI was calculated according to the procedure described in [
49]. The yield of each tree was weighed separately, and subsamples of 100 olive fruits from the total harvest of the four trees were collected to determine the average weight of the fruit and the number of fruits per tree. All subsamples were weighed fresh. Oil content was measured for a 1 kg sample of the four trees by Soxhlet extraction in accordance with EEC Regulation 2568/1991 [
50]. For this, the sample was crushed and dried in a DryBig 250 oven (Borel Fours Industriels and Etuves, S.A., Neuchâtel, Switzerland) at 105 °C. In this study, the trees were harvested in late October and early November.
2.6. Statistical Analysis
An analysis of variance (ANOVA) was used for the statistical analysis of the data. When significant differences were detected, a comparison of means was made applying Duncan’s test at p < 0.05. The statistical package IBM SPSS version 24.0 for Windows (IBM Corp. Armonk, NY, USA) was used.
4. Conclusions
This work aimed to evaluate and develop an automated irrigation protocol in a hedgerow olive orchard using the IRRIX platform. In this case, the device had to simulate a recommended irrigation strategy for this type of plantation that included the use of regulated deficit irrigation. The characterization of the spatial variability was useful to locate the control points.
The automatic irrigation scheduling simulated the expert criterion, adapting to the specific conditions of the control point where the soil sensors were installed. The total amount of manually and automatically applied irrigation water was similar at the various control points, but not its distribution as the DSS estimated the water needs by combining the water balance method with a feedback mechanism based on the moisture sensor readings. In addition, the DSS was able to establish an RDI strategy which induced moderate-to-severe stress during Phase II of the crop in the parts of the plot with the most unfavorable conditions for the hedgerow (places with high vigor and low ECa). The adoption of an appropriate RDI strategy in an SHD olive grove enabled homogenization of plot yield, with a tendency to increase production. The automatic irrigation allowed irrigation management with minimum human intervention.
The results obtained with the system improved in the third year, when adjustments were made based on the information collected in the previous year. The automated irrigation has proven to be able to adapt to the particular conditions of the place where it is installed and to the different growth stages of the crop, thus improving the key efficiency parameters.
Automatic irrigation scheduling is of particular interest in the case of olive groves. In this crop, monitoring stem water potentials at commercial level for crop phase dosage readjustment is complicated by the strongly negative values that can be attained but which cannot be measured with a pump-up pressure chamber.
Although the results were encouraging, further studies are required to improve certain aspects of the system, particularly relating to the integration of the NDVI and ECa measurements into the DSS.

 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}