1. Introduction
A strapdown inertial navigation system (SINS) can provide entirely autonomous altitude, velocity and positioning navigation solutions [
1]. The inertial measurement unit (IMU) consists of three-axis orthogonal gyroscope and accelerometer components, used to measure the angular velocity and specific force of vehicles, missiles, aircraft and ship [
2]. Compared with other navigation systems such as global navigation satellite system (GNSS) and astronomical navigation system, the inertial navigation system (INS) provides a navigation solution that is all-weather, high-frequency, continuous and not affected by the external environment.
Generally, the start-up of an INS is also known as the typical initial alignment [
3], which consists of two phases: coarse alignment (CA) and fine alignment (FA), respectively. The accurate location information especially geographic latitude is a crucial prerequisite for the existing SINS initial alignment methods. Without geographic latitude, even an SINS can not work and provide navigation solutions, which limits some applications of SINS [
4]. At present, the positioning information is obtained by GNSS for self-alignment of INS. However, there are few studies on how to achieve alignment for applications that cannot receive GNSS satellite signals, such as tunnels, underground, forests, underwater, canyons, and other places that interfere with satellite information, and other application environments where it is difficult to obtain accurate geographic latitudes.
Whereas, the commonly used navigation coordinate frame (
n-frame) is established based on the SINS location (latitude, longitude, and altitude), and its axes
,
, and
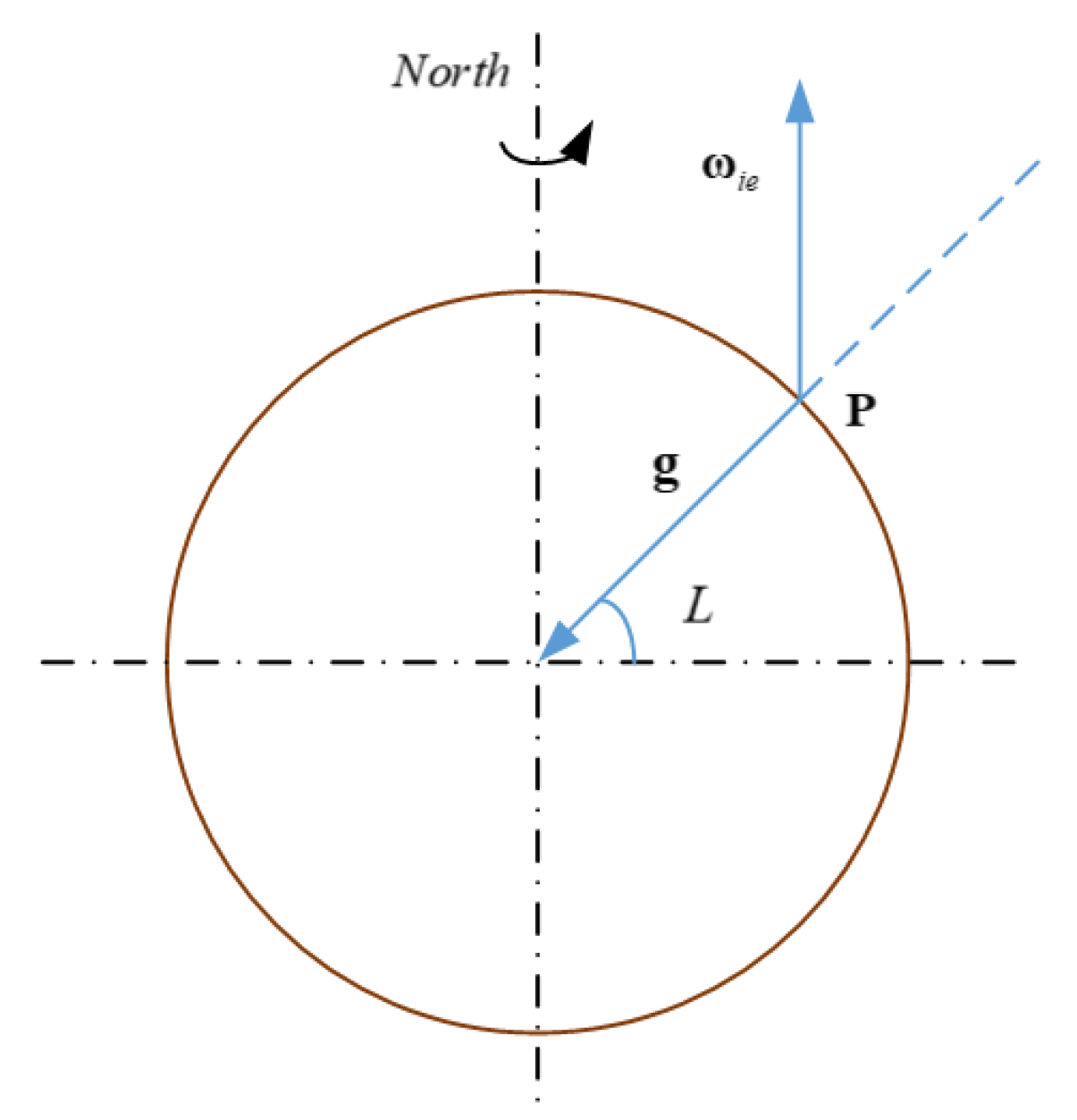
point to the east, north and up (ENU), known as the local geographic coordinate frame. In addition, the amplitude of gravity acceleration changes with the change of geographic latitude. The gravity acceleration of P point on surface of the Earth can be obtained by
, where
L is the geographic latitude [
5]. Because the gravity acceleration is a major function of latitude that latitude information is very important for calculating the magnitude of local gravity acceleration. Moreover, the geographic latitude can be used to decompose the Earth rate vector into
n-frame. In
n-frame, the projection of the Earth rate vector in three axes is [ 0,
,
(
is the amplitude of the Earth rate vector) respectively, while the acceleration vector of gravity is only in the z-axis direction, and the amplitude is equal to the local gravity [
6]. Therefore, the initial geographic latitude is significant and indispensable for INS, so how to determine the geographic latitude in these applications mentioned above is a core task. When there is only an INS, can we only use the static measurement information of the IMU to obtain the geographic latitude?
Inspired by the analytical CA method (also known as the three-axis attitude determination (TRIAD)) [
7,
8,
9], the gyros triads measure the Earth’s rate vector while the accelerometers triads measure the local gravity acceleration vector in body frame (
b-frame) when the SINS is static [
10,
11]. Therefore, the geographic latitude is determined by using the static constraints of SINS and the measurement of IMU, and the four geographic latitude determination (LD) methods are elaborated in the paper. In [
12], the derivation process of geometric LD is given. Yan’s work is mainly to estimate the latitude for initial alignment, the error analysis of LD is not his interest. Aiming at the alignment problem of SINS without latitude, Refs. [
13,
14] provide a method based on the quaternion calculation of vector of earth rotational angular velocity to achieve initial alignment for both stationary and swaying base. Even if the initial alignment without latitude can be achieved, without the latitude information, the system cannot continue the navigation task. Refs. [
15,
16] proposed a method for latitude estimation and initial alignment on swaying base. These works did not analyze the latitude estimation error and the latitude determination algorithm is not comprehensive.
This paper mainly expends four LD methods for the stationary SINS in unknown-position condition. By the error analysis of LD methods, it is concluded that the estimated latitude error is mainly affected by the biases of the accelerometers and gyros, or some certain direction gyros and accelerometers bias in navigation frame. The analytical CA and gyro bias estimation method by two position alignment was proposed in [
17]. Using the two different attitudes of INS, the three-axis gyros bias can be calculated. The estimation and compensation of the gyros biases can effectively reduce the aligned heading misalignment angle and improve the navigation accuracy. Silva analyzes normality and orthogonality error of the analytical CA DCM from
b-frame to
n-frame
then gives the bias of northward and upward gyros and upward accelerometer bias estimation [
18]. After the LD process and initial alignment can be performed simultaneously, the estimated latitude can be used synchronously for the INS to quickly start without the initial position. Based on the LD error analysis, the CA bias estimation method (CA-CBE) is introduced. After compensating the bias, the accuracy of latitude estimation is improved obviously. Furthermore, the relationship between latitude error and latitude of four methods is analyzed, so that the best LD method can be selected in different locations. In addition, the determined latitude can correct the position error of the inertial navigation system that works for a long time.
This paper is organized as follows.
Section 2 gives four LD methods, whilst the comprehensive error analysis of each LD method is proposed in
Section 3. The IMU partial bias estimation algorithm is drawn into
Section 4.
Section 5 and
Section 6 present simulation and experiment results. Finally, the conclusion is devoted in
Section 7.
3. Latitude Determination Error Analysis
The previous section derived the LD formula based on the IMU error-free assumption, but for the actual INS, the inertial sensor error usually includes bias, random walk, scale factor error and bias drift [
1,
2]. However, it takes only a few minutes to complete the LD, and calculating the average value can effectively reduce the influence of noise, therefore the in-run biases of the IMU are considered as the main error source for LD. In addition, when the INS is static, the IMU’s scale factor error is negligible.
The in-run biases of gyros and accelerometers are
and
, respectively, that is
To unify the error analysis of the latitude estimation, the equivalent biases in the
n frame are analyzed as the error source, since the
b frame can be arbitrarily oriented with respect to the
n frame. For example,
, and
for ideal case. The expressions become
where the subscripts
N,
U represent the amount of error in the ENU direction.
3.1. Magnitude Latitude Determination Method
The Equation (
10) of magnitude LD method can be rewritten as follows
Substituting Equation (
21) into Equation (
23) yields
Assuming that the latitude error is a small angle error, where
is the latitude error, expand the above equation and ignore the second-order error term. The above equation combined with Equation (
22) can be simplified to obtain the following equation.
where
is the gravity acceleration model error scaling factor. The main error source of magnitude LD method is gravity acceleration model error, which is caused by local gravity replaced by the average gravity acceleration. The northward and upward bias of the accelerometer and the upward bias of the gyros also affect the LD error, as well as the location itself.
3.2. Geometric Latitude Determination Method
Substituting Equation (
21) into Equation (
13) yields
The following is the derivation and approximation of the first square root reciprocal of Equation (
26). In the process of error derivation, only the first-order error terms are retained and the second-order error terms are ignored.
Similarly, the derivation and approximation of the second square root reciprocal of Equation (
26) can be obtained as follows.
Then the error of geometric LD method becomes
By substituting Equation (
22) into Equation (
29), the following geometric LD error equation can be obtained.
By error analyzing the geometric LD method, according to Equation (
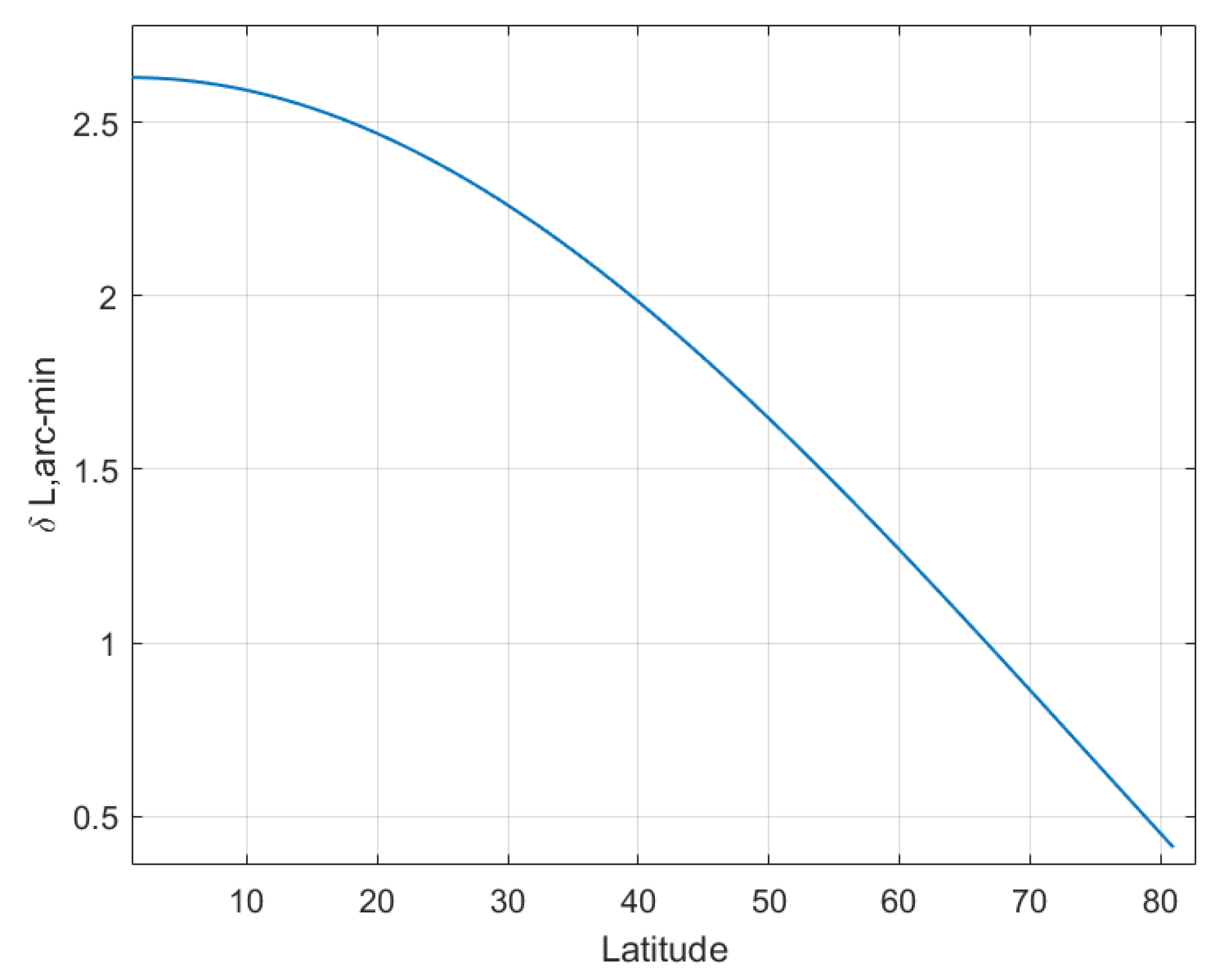
30), it can be found that the latitude error is mainly affected by the upward and northward bias of gyros and northward bias of accelerometer, as well as being modulated by the latitude itself.
3.3. Analytic 1 Latitude Determination Method
From Equation (
15), it is easy to get sine and cosine expressions of pitch
and roll
related to IMU output, and substitute these expressions into Equation (
18). The LD equation of analytic 1 method can be rewritten as follows.
Then the error of latitude can be written as follows
By rearranging Equation (
32) in combination with Equations (
22) and (
27), the latitude error equation of analytic 1 LD method can be expressed as follows
According to Equation (
33), both the northward bias of accelerometer and the upward bias of gyros contribute to the latitude error of the analytic 1 LD method.
3.4. Analytic 2 Latitude Determination Method
Similar to the derivation process of latitude error in analytic 1 method, it is easy to obtain the sine and cosine expressions between azimuth
and IMU output from Equation (
19). Associating Equations (
15), (
19) and (
20), the LD equation of analytical 2 method can be rewritten as follows:
where
,
and
.
The derivation of the latitude error is rather complicated. The LD error equation of Analytic 2 are not carried out. As a suggestion for future work, we intend to derive error equations similar to other LD methods. So far, the error analysis is carried out by using the subsequent simulation and experimental results.
4. Imu Partial Bias Estimation Algorithm
Inspired by the IMU bias estimation method in [
18], the CA-CBE method performed after the latitude determination. The specific calculation process is to calculate the analytical CA matrix
according to Equation (
2).
where
is a symmetric matrix representing the attitude matrix normality error vector
and orthogonality error vectors
, respectively, that is
According to the bias estimation Equations (45)–(47) in [
18], the upward bias of accelerometer, northward bias and upward bias of the gyros can be computed as follows.
From the previous error analysis of the LD method, it can be found that the LD error mainly originates from the IMU bias, and the northward bias of accelerometer, upward and northward biases of gyro are the main error sources. By estimating and compensating for the partial bias of the IMU, the accuracy of the LD can be improved.
7. Conclusions
This paper mainly solves the problem that the INS cannot be started in some unknown positions (especially the latitude). This technology can be used to determine the latitude information of the INS, and the LD is performed only based on the output of the static inertial navigation system itself. Four algorithms of LD are comprehensively introduced, and the relationship between the LD error, IMU bias and INS position is emphatically deduced. Simulation and experiments verify the effectiveness of the LD algorithm, as well as the derived error equations. For gyros and accelerometers with bias of 0.01/h and 100 g, the LD error of 500 monte carlo simulation of geometric method is less than 1 arc-min, while for gyros and accelerometers with bias of 1/h and 1 mg, the LD error is less than 0.5, indicating that the feasibility of extending the method to lower grade IMU. The “CA-CBE” bias estimation algorithm is introduced into the LD stage, which can effectively estimate the partial bias of IMU. After the estimated IMU bias is compensated, the accuracy of the LD is further improved. The LD error of actual SINS is less than 1.5 arc-min when the bias of IMU is uncompensated, and the LD error is less than 0.3 arc-min after compensated bias of IMU. Finally, the LD error is affected by the position of the inertial navigation system. The typical navigation-level SINS is used for imulation and experimental verification the different latitudes. The results are consistent with the derived error formula. The application of this technology can further improve the autonomy of INS.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}