1. Introduction
With the development of technology, more precise and accurate techniques for measuring smaller displacement and vibration are required from scientific research fields to various industrial fields, including metrology, non-contact ultrasound and/or pressure measurement [
1,
2,
3]. Most conventional nanometer-scale precision measurement techniques have used the optical quadrature fringe detection method implemented with various interferometers [
4,
5,
6,
7,
8,
9,
10]. In principle, if the entire complex interference signal is available, a pair of conjugate signals, for example, the phase information of the interference signal can be easily extracted, with which the displacement applied to the interferometer is simply calculated. However, due to the nature of the typical photodetector, it can only obtain a part of the entire complex interference signal, i.e., the amplitude part [
11,
12] in general. Thus, a method for obtaining the remaining part of the signal, the phase part, needs to be devised.
Theoretically, a pair of conjugate signals, the in-phase and quadrature components, can be extracted from any two signals having a mutual phase difference, but not an integer multiple of
. For this reason, many studies have attempted to obtain the interference signals of different phases, using bulk optic components such as polarization optics and electric modulators (such as acousto-optic modulators or electro-optic modulators) [
8,
9,
10,
13]. However, these methods suffer from drawbacks of electromagnetic interference and signal drift, due to the use of electric components. Usually, they require sophisticated optical alignments. The interference signals used to extract the conjugate signal pair are asked ideally to have (a) zero-offsets, (b) equal amplitude coefficients, and (c) well-defined phase difference between each other. However, in the actual system, difficulties arise from electrical DC-offsets, unequal detector gains, and drift in the phase difference. Thus, there are errors of several nanometers in displacement measurements [
4,
5,
14,
15].
In the 3 × 3 fiber-optic coupler-based interferometer, the interference signals, simultaneously measured at the three return ports, have unique intrinsic phases, depending on the structural characteristics of the fiber coupler [
2,
11]. An ideal 3 × 3 coupler with equal power splitting ratios has the same intrinsic phase difference of
. However, it is difficult to fabricate the ideal coupler, due to errors in the manufacturing process. For the coupler with different splitting ratios, the intrinsic phase difference caused them to not be the same as each other, but the phase difference among the return ports can be theoretically calculated with the experimentally measured splitting ratios of the coupler [
11]. However, the precision of measuring the splitting ratio of the coupler cannot be guaranteed to be sufficiently high enough to get a precise quadrature detection. In this study, we present a 3 × 3 fiber-optic coupler-based interferometer system that is capable of doing accurate optical quadrature detection, despite not meeting the preconditions (a)–(c).
As a main point of this study, we present that the relationship between the two interference signals, measured at any two return ports of the interferometer system not meeting the preconditions (a)–(c), can be expressed with an equation of ellipse. Therefore, by fitting a curve to the signal of an actual non-ideal system, we can retrieve the information of the system, deviated from the ideal one meeting the preconditions (a)–(c), with which we can continue the quadrature detection process. To the best of our knowledge, this is the first application of the curve fitting approach in the displacement measurement system, based on a 3 × 3 coupler-based interferometer. To verify the performance of the proposed method, we measure the sinusoidal nanometer-scale oscillation driven by a piezoelectric transducer (PZT) and present the performance of measurement. The stability of the system parameters is investigated by measuring the variations in the amplitude coefficients of the two interference signals and their intrinsic phase difference for three hours at every 30 s.
2. Principle of Optical Quadrature Measurement and Ellipse Fitting
In the fiber-optic coupler-based interferometer, the phase of the interference signal at the return port depends on the position of the port and the characteristics of the coupler, especially the total number of ports and the power splitting ratios. The 3 × 3 fiber coupler with equal power splitting ratio has an ideal intrinsic phase difference of , which makes it possible to extract the quadrature component of each interference signal. However, the intrinsic phase difference depends on the actual power splitting ratios of the coupler. It is noteworthy that in a 2 × 2 coupler, the phase difference between two return ports is always , regardless of its power splitting ratio.
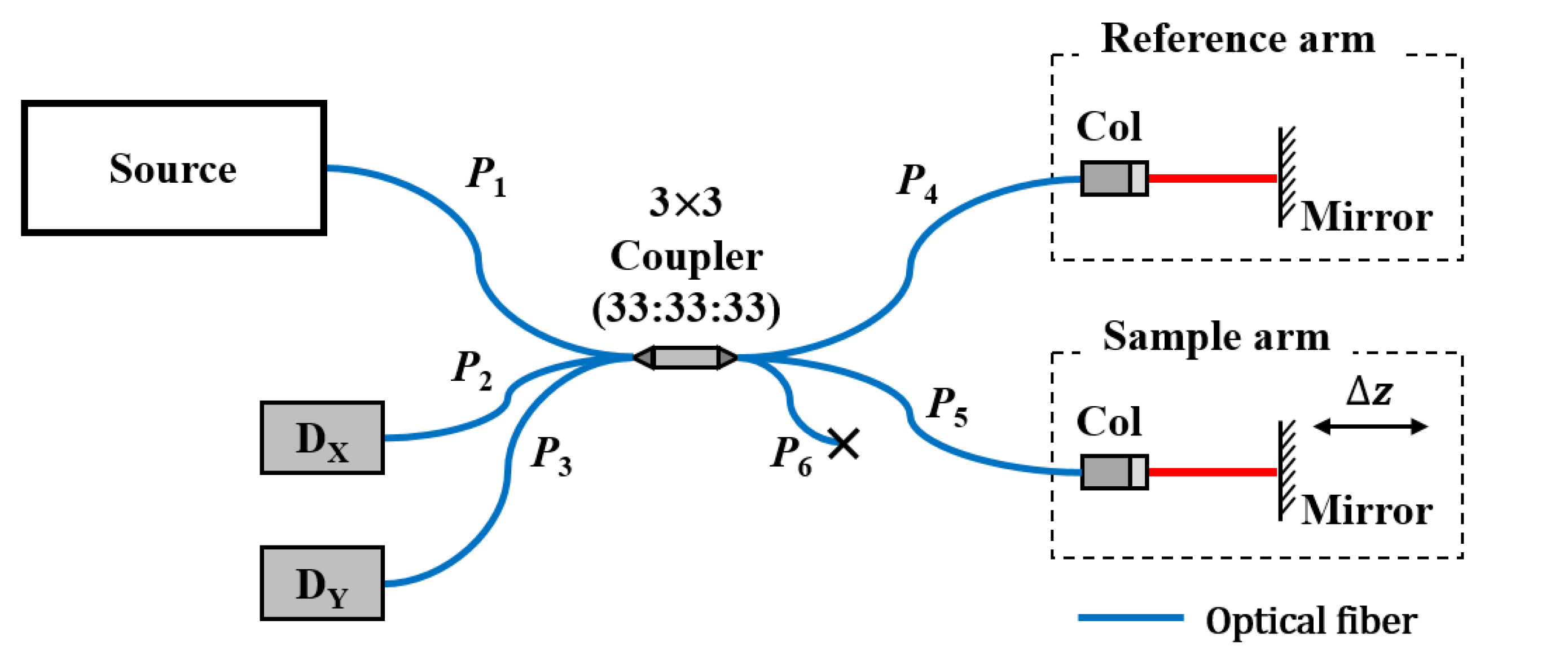
Figure 1 shows a Michelson interferometer based on a 3 × 3 coupler. The input light is delivered to the reference and sample arms through the coupler, and then reflected and back-coupled into the coupler. Thereafter, the back-coupled light is measured at the return ports
P2 and
P3, with detectors D
X and D
Y, respectively. When the optical path-length difference (OPD) between the reference and sample arms is shorter than the coherence length of the light source, both detectors give the interference signals of:
where,
and
are DC-offsets, and
and
are the AC amplitudes (called the amplitude coefficients) of the detected signals. The intrinsic phase difference between two return ports is denoted by
. The phase
is the result of the interference between the sample and reference arms of the interferometer, which is given by the OPD (
), the wavenumber (
) of the light, and the initial phase (
) of the interferometer setup as:
where the factor of 2 is due to the roundtrip. At port
P3, due to the intrinsic property of the coupler, the phase of the interference signal is shifted by
, as in Equation (2).
By taking squares of
and
in Equations (1) and (2), and then adding them together, we can show that the two measured signals form an ellipse equation, as given by [
16]:
The equation depends on the five parameters: the DC-offsets (h and k), AC amplitudes (a and b), and intrinsic phase difference (). Therefore, by changing more than , with shifting the of Equation (3), we can experimentally obtain the Lissajous curve of the two correlated signals, and . From the Lissajous curve, by fitting with an ellipse, the five parameters of the interferometer system can be derived. Of course, with these parameters, we want to get the with a higher precision and an initial phase-independent uniform sensitivity.
For the curve fitting, at first, the data is fitted using a polynomial equation. By expanding the terms of Equation (4) and redefining the two variables as
and
, we have the general ellipse equation, in the form of a second order polynomial, as [
5]:
It is not difficult to show that the five coefficients (
B,
C,
D,
E, and
F) of the equation are mathematically related to the five parameters of Equation (4) as:
For better visibility of the ellipse curve fitting, the ellipse can be expressed using conventional parameters; semi-major axis (
), semi-minor axis (
), and rotation angle (
), as in
Figure 2.
By defining the two intermediate parameters as:
the parameters of the ellipse in
Figure 2 can be obtained as [
17]:
It is noted that the DC-offsets are the same as Equations (6) and (7). In addition, the ellipse eccentricity (
) is calculated as:
With the parameters of Equations (6)–(10), derived from the curve fitting, the phase
of the interference signal can be calculated. By using the cosine subtraction formula with Equations (1) and (2), we obtain [
16]:
Alternatively, for the continuous phase information, by dividing it with Equation (1), we have a tangent function of the phase:
Therefore, the small change in the sample arm of the interferometry system, the displacement giving
, can be calculated with the phase variation
of Equation (17), by using Equation (3) as:
From another point of view, if we have only a single channel for detecting the interference signal such as the one of Equation (1), for the same displacement , the detected signal intensity becomes dependent, not only on the amount of phase variation , but on the initial phase including , at which the small displacement begins. Thus, to get the initial phase independent uniform sensitivity, we need at least one more signal channel having a different initial phase such as Equation (2). For that case, however, the relative phase and the AC signal amplitudes, a and b, of Equations (1) and (2) should be adjusted with hardware to have preset ideal values, or they should be precisely extracted with a premeasurement made with the same hardware. This premeasurement can be done effectively by utilizing the proposed ellipse curve fitting method.
5. Discussion
There are other methods for calculating the intrinsic phase difference, such as that of Choma et al. [
11], who experimentally measured the power splitting ratio of the coupler. However, since the intensity of the interference signal is easily affected by the experimental environment, the proposed curve fitting method would be more accurate and convenient in obtaining the parameters of the interferometer system. Moreover, it can also be used as a means for time calibration. Just sweeping the OPD of the interferometer by more than
the calibration can be completed.
The measurements in
Figure 4 were made with the linear displacement corresponding to 10 revolutions in the Lissajous curve. The same measurement can be made with a small linear displacement corresponding to just one revolution. Experimentally, we observed that the STDEVs in
Table 1 became smaller with increasing the number of revolutions. However, with the 3-hour experiment, the STDEVs became bigger with time, as can be seen in
Table 1 and
Table 3.
The evident factor that caused the error in the displacement measurements was the high frequency component of the signal. However, in our experiments, no filter was used to cut the high frequency component. Depending on the application, a proper analog or digital filter, such as a low or band pass including the notch filter, is expected to decrease the noise of the measurement significantly.
Due to the high electric noise, inducing a tiny but highly calibrated linear displacement was not easy. Therefore, the minimum noticeable sinusoidal vibration was applied to the sample arm of the system with PZT, and obtained the displacement amplitude of it as 1.5 nm, as in
Figure 6a. Further, the STDEV between the measured data and the fitted sinusoidal curve was calculated as 0.4 nm, which is thought to be considered as the short-term sensitivity of the system. For the long-term sensitivity, the contribution of the intrinsic phase difference was more than 0.6 nm, but still in the sub-nanometer range. The signal-to-noise ratio calculated with the RMS value of the small signal giving
Figure 6a and the maximum output voltage of the detector, was about 75 dB.
Further, we measured the displacement only at one point of an object. For the double points measurement, the blocked port,
P6 in
Figure 1, could be used, which could be a subject of future work. By utilizing a ribbon fiber, a system suitable for multi-points measurements can also be implemented. The proposed technique can be used for fields requiring high precision vibration or displacement measurements. We are also seeking ways to improve this technique, so as to measure the roughness of the surface of various objects, including paintings and potteries.
6. Conclusions
We have demonstrated a nanometer-scale displacement or vibration measurement system implemented by using a 3 × 3 fiber-optic coupler-based interferometer. By utilizing the intrinsic phase difference of the multi-port interferometer, we could reconstruct the entire complex interference signal. Moreover, we showed that the relationship between the interference signals measured at any two return ports of the coupler could be expressed with an equation of ellipse. Therefore, the ellipse curve fitting could be applied to the Lissajous curve plotted with the two measured interference signals. The five parameters of the ellipse representing the interference system could be successfully extracted from the curve fitting. With the pre-obtained system parameters, the displacement applied on the system could be measured with a higher precision and a uniform sensitivity, furthermore, not being appreciably affected by the initial phase of the system.
The stability of the interferometer system was affected, not only by the characteristics of the coupler, but also by the experimental conditions, including the different gains and DC-offsets of the detectors. The Lissajous curve was plotted every 30 s for 3 h, by changing the OPD in the sample arm. No significant changes in the ellipse parameters were observed. The evident change happened in the length of the semi-minor axis of the ellipse , with a standard deviation (STDEV) of 0.9% for over 3 h. However, the intrinsic phase difference of the coupler was rather stable; it had a mean of 2.1671 radians and STDEV of 0.23%, corresponding to 0.6 nm error in the displacement measurement. The orientation angle of the ellipse was also stable, only 0.26 in STDEV.
To verify the accuracy of the measurement with the proposed method, a 20 kHz small sinusoidal vibration was applied to the sample arm, with a PZT driven by a 500 mVpp voltage. The 20 kHz vibration of 1.5 nm amplitude was measured with a STDEV of 0.4 nm. The signal-to-noise ratio was about 75 dB, which is expected to be increased by using proper frequency filters depending on applications. With these results, we expect that the proposed system and the signal processing method can be easily used in many applications where precise vibration or displacement measurements are required.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}