
A Bi-Spectral Microbolometer Sensor for Wildfire Measurement

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Bomberos
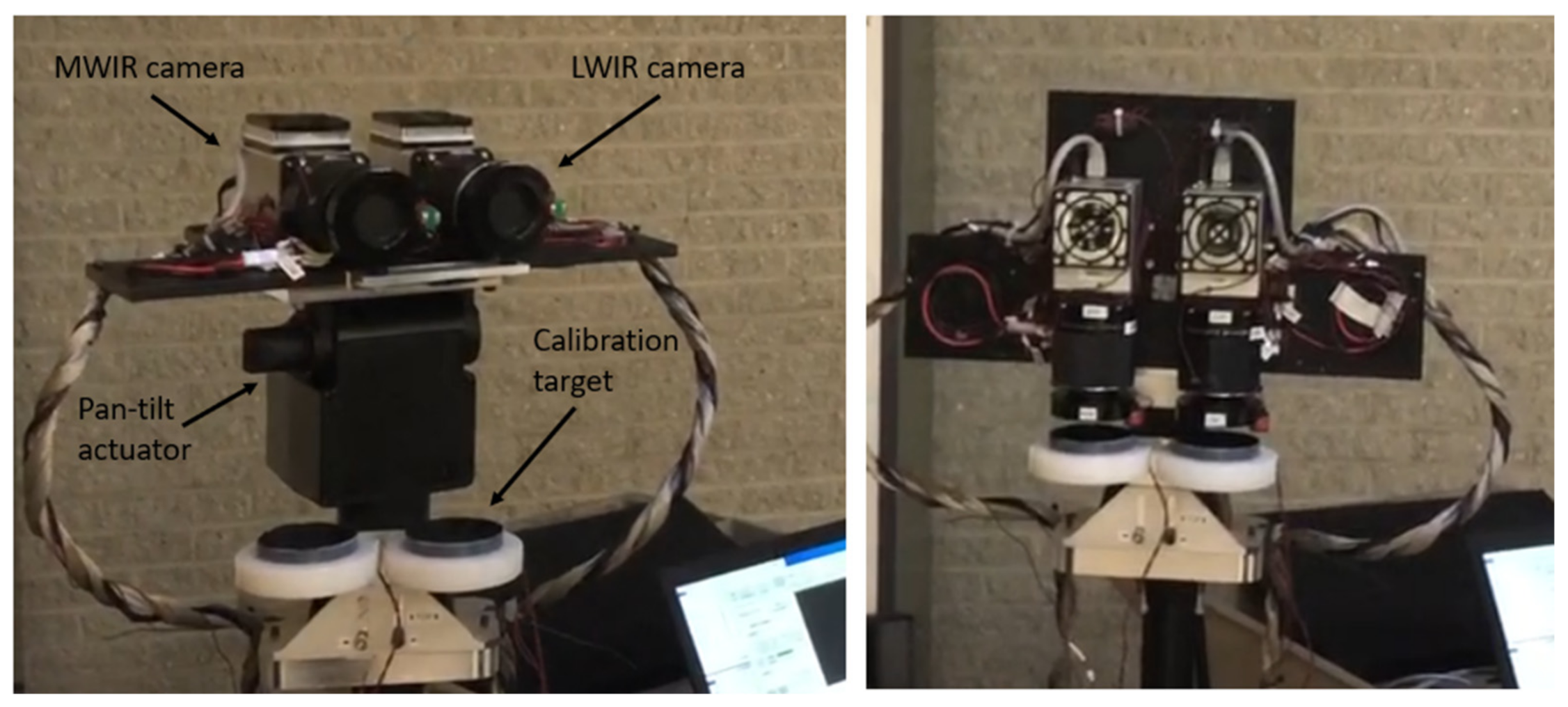
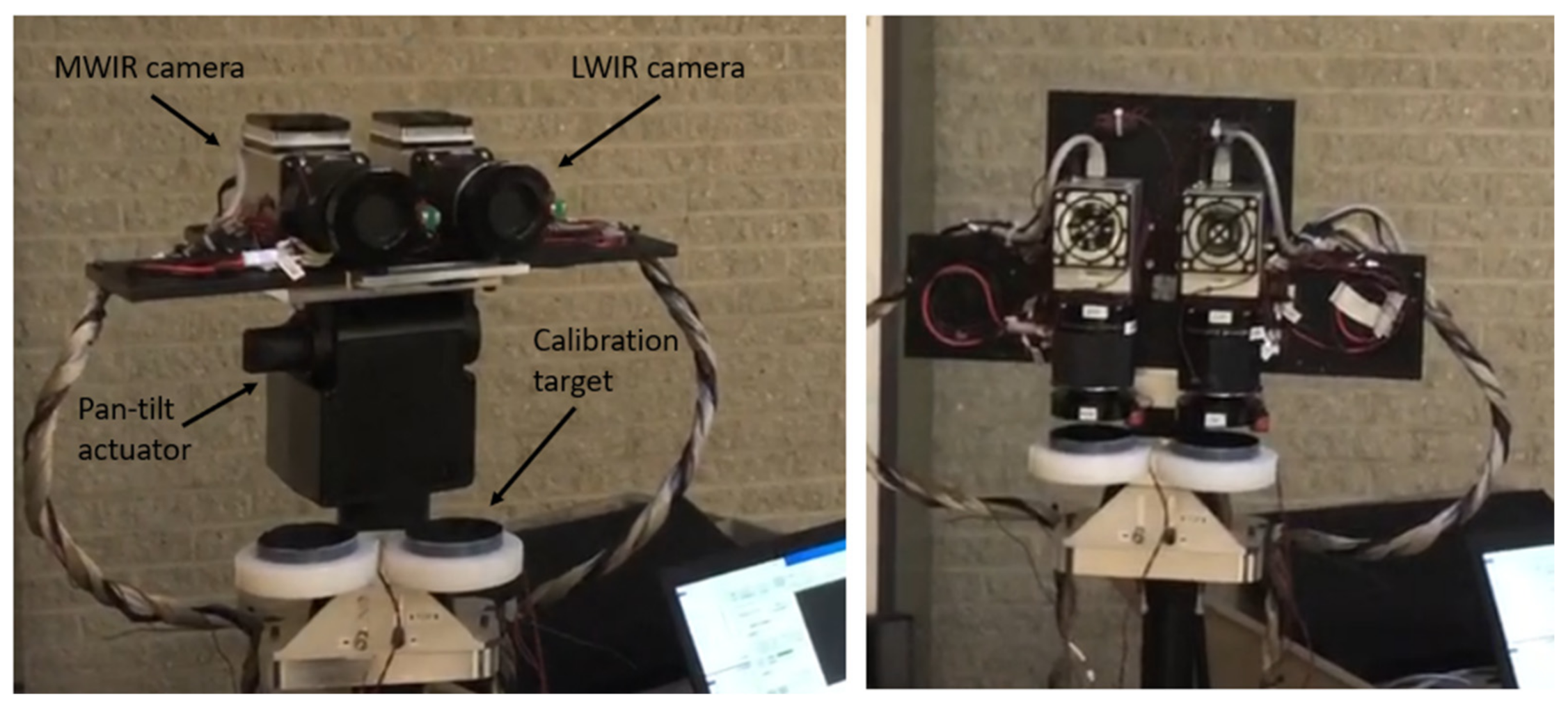
2.1.1. System Description
2.1.2. Calibration and Measurement Procedure
- t = 0 s:
- tilt the cameras downwards towards the calibration targets, then open the shutters every 3 s for a duration of 1 s each and acquire offset images.
- t = 25 s:
- close the shutters and orient the cameras towards the scene of interest.
- t = 29 s:
- open the shutters, acquire 1 s of scene images, then close the shutters.
- t = 35 s:
- tilt the cameras downwards towards the calibration targets, then open the shutters every 3 s for a duration of 1 s each and acquire offset images.
- t = 60 s:
- repeat the cycle.
2.2. Experimental Design and Protocol
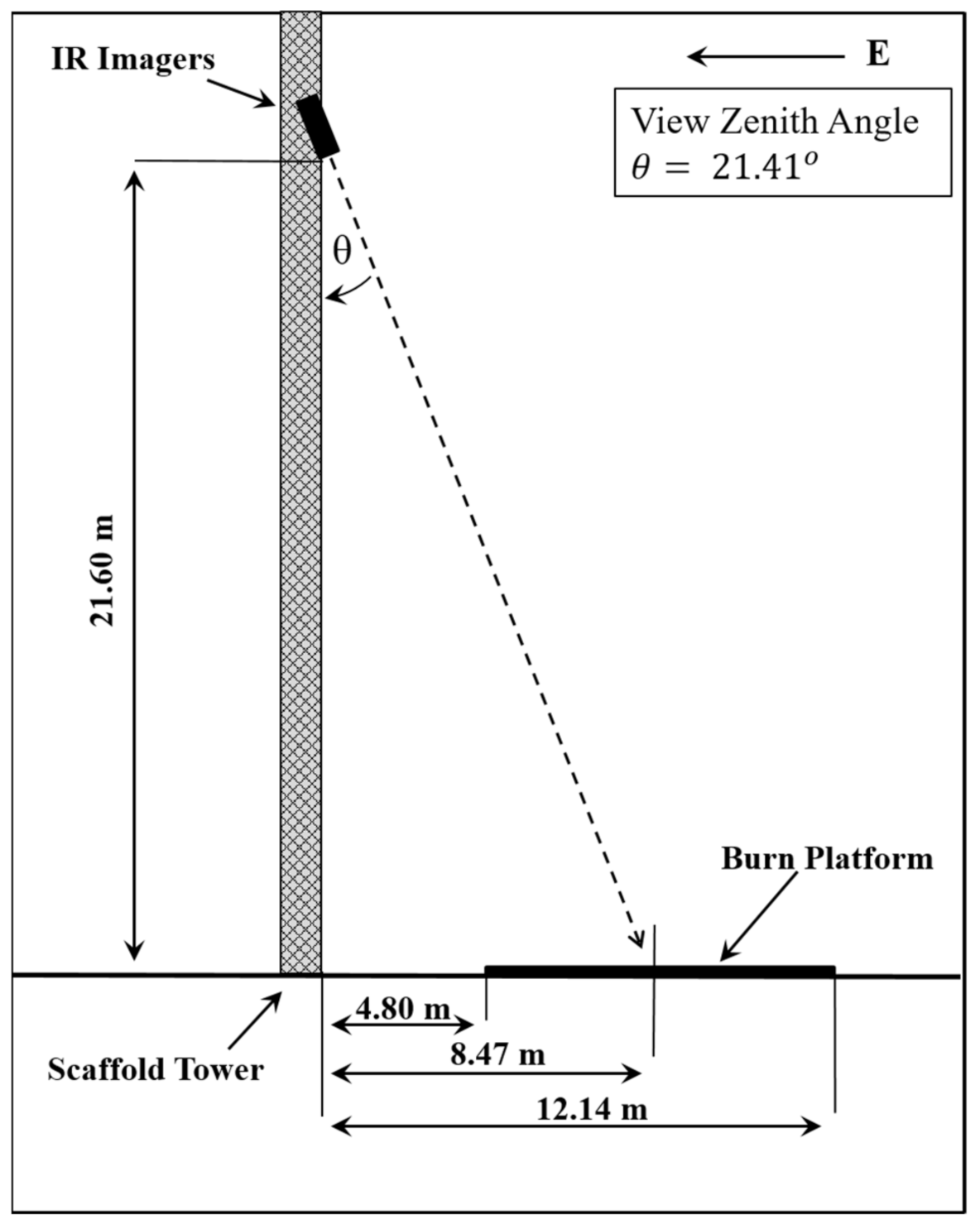
2.2.1. Layout
2.2.2. Reference Imagery
2.2.3. Data Collection Protocol
2.3. Data Processing and Analysis
2.3.1. Temporal and Spatial Characterization
2.3.2. Fire Radiative Power Calculations
2.3.3. Bomberos MWIR—FLIR MWIR Intercomparison
2.3.4. Bomberos MWIR—LWIR Intercomparison
3. Results
3.1. Bomberos MWIR and FLIR MWIR FRP Comparison
3.2. Bomberos MWIR and LWIR FRP Comparison
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Giglio, L.; Boschetti, L.; Roy, D.P.; Humber, M.L.; Justice, C.O. The Collection 6 MODIS burned area mapping algorithm and product. Remote Sens. Environ. 2018, 217, 72–85. [Google Scholar] [CrossRef] [PubMed]
- Bowman, D.M.J.S.; Balch, J.K.; Artaxo, P.; Bond, W.J.; Carlson, J.M.; Cochrane, M.A.; D’Antonio, C.M.; DeFries, R.S.; Doyle, J.C.; Harrison, S.P.; et al. Fire in the Earth System. Science 2009, 324, 481–484. [Google Scholar] [CrossRef] [PubMed]
- Archibald, S.; Staver, A.C.; Levin, S.A. Evolution of human-driven fire regimes in Africa. Proc. Natl. Acad. Sci. USA 2012, 109, 847. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Taylor, A.H.; Trouet, V.; Skinner, C.N.; Stephens, S. Socioecological transitions trigger fire regime shifts and modulate fire–climate interactions in the Sierra Nevada, USA, 1600–2015 CE. Proc. Natl. Acad. Sci. USA 2016, 113, 13684. [Google Scholar] [CrossRef] [Green Version]
- Balch, J.K.; Bradley, B.A.; Abatzoglou, J.T.; Nagy, R.C.; Fusco, E.J.; Mahood, A.L. Human-started wildfires expand the fire niche across the United States. Proc. Natl. Acad. Sci. USA 2017, 114, 2946. [Google Scholar] [CrossRef] [Green Version]
- Flannigan, M.D.; Krawchuk, M.A.; de Groot, W.J.; Wotton, B.M.; Gowman, L.M. Impacts of changing climate for global wildland fire. Int. J. Wildland Fire 2009, 18, 483–507. [Google Scholar] [CrossRef]
- Jolly, W.M.; Cochrane, M.A.; Freeborn, P.H.; Holden, Z.A.; Brown, T.J.; Williamson, G.J.; Bowman, D.M.J.S. Climate-induced variations in global wildfire danger from 1979 to 2013. Nat. Commun. 2015, 6, 7537. [Google Scholar] [CrossRef]
- Theobald, D.M.; Romme, W.H. Expansion of the US wildland–urban interface. Landsc. Urban Plan. 2007, 83, 340–354. [Google Scholar] [CrossRef]
- Johnston, L.M.; Wang, X.; Erni, S.; Taylor, S.W.; McFayden, C.B.; Oliver, J.A.; Stockdale, C.; Christianson, A.; Boulanger, Y.; Gauthier, S.; et al. Wildland fire risk research in Canada. Environ. Rev. 2020, 1–23. [Google Scholar] [CrossRef]
- Allison, R.S.; Johnston, J.M.; Craig, G.; Jennings, S. Airborne optical and thermal remote sensing for wildfire detection and monitoring. Sensors 2016, 16, 1310. [Google Scholar] [CrossRef] [Green Version]
- Larkin, N.K.; O’Neill, S.M.; Solomon, R.; Raffuse, S.; Strand, T.; Sullivan, D.C.; Krull, C.; Rorig, M.; Peterson, J.; Ferguson, S.A. The BlueSky smoke modeling framework. Int. J. Wildland Fire 2009, 18, 906–920. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Anderson, K.; Pavlovic, R.; Moran, M.D.; Englefield, P.; Thompson, D.K.; Munoz-Alpizar, R.; Landry, H. The FireWork v2.0 air quality forecast system with biomass burning emissions from the Canadian Forest Fire Emissions Prediction System v2.03. Geosci. Model Dev. 2019, 12, 3283–3310. [Google Scholar] [CrossRef] [Green Version]
- Kaiser, J.W.; Heil, A.; Andreae, M.O.; Benedetti, A.; Chubarova, N.; Jones, L.; Morcrette, J.-J.; Razinger, M.; Schultz, M.G.; Suttie, M.; et al. Biomass burning emissions estimated with a global fire assimilation system based on observed fire radiative power. Biogeosciences 2012, 9, 527–554. [Google Scholar] [CrossRef] [Green Version]
- Valero, M.M.; Verstockt, S.; Rios, O.; Pastor, E.; Vandecasteele, F.; Planas, E. Flame filtering and perimeter localization of wildfires using aerial thermal imagery. SPIE 10214-Thermosense Therm. Infrared Appl. 2017, 10214, 1–8. [Google Scholar]
- Valero, M.M.; Rios, O.; Pastor, E.; Planas, E. Automated location of active fire perimeters in aerial infrared imaging using unsupervised edge detectors. Int. J. Wildland Fire 2018, 27, 241–256. [Google Scholar] [CrossRef] [Green Version]
- McRae, D.J.; Jin, J.-Z.; Conard, S.G.; Sukhinin, A.I.; Ivanova, G.A.; Blake, T.W. Infrared characterization of fine-scale variability in behaviour of boreal forest fires. Can. J. For. Res. 2005, 35, 2194–2206. [Google Scholar] [CrossRef]
- Pastor, E.; Àgueda, A.; Andrade-Cetto, J.; Muñoz, M.; Pérez, Y.; Planas, E. Computing the rate of spread of linear flame fronts by thermal image processing. Fire Saf. J. 2006, 41, 569–579. [Google Scholar] [CrossRef] [Green Version]
- Paugam, R.; Wooster, M.J.; Roberts, G. Use of Handheld Thermal Imager Data for Airborne Mapping of Fire Radiative Power and Energy and Flame Front Rate of Spread. IEEE Trans. Geosci. Remote Sens. 2013, 99, 1–15. [Google Scholar] [CrossRef]
- Johnston, J.M.; Wheatley, M.J.; Wooster, M.J.; Paugam, R.; Davies, G.M.; DeBoer, K.A. Flame-Front Rate of Spread Estimates for Moderate Scale Experimental Fires Are Strongly Influenced by Measurement Approach. Fire 2018, 1, 16. [Google Scholar] [CrossRef] [Green Version]
- Wooster, M.J.; Roberts, G.; Perry, G.L.W.; Kaufman, Y.J. Retrieval of biomass combustion rates and totals from fire radiative power observations: FRP derivation and calibration relationships between biomass consumption and fire radiative energy release. J. Geophys. Res. 2005, 110, D24311. [Google Scholar] [CrossRef]
- Smith, A.M.S.; Wooster, M.J. Remote classification of head and backfire types from MODIS fire radiative power and smoke plume observations. Int. J. Wildland Fire 2005, 14, 249–254. [Google Scholar] [CrossRef] [Green Version]
- Johnston, J.M.; Wooster, M.J.; Paugam, R.; Wang, X.; Lynham, T.J.; Johnston, L.M. Direct Estimation of Byram’s fire intensity from infrared remote sensing imagery. Int. J. Wildland Fire 2017, 26, 668–684. [Google Scholar] [CrossRef] [Green Version]
- Johnston, J.M.; Jackson, N.; McFayden, C.; Phong, L.N.; Lawrence, B.; Davignon, D.; Wooster, M.J.; van Mierlo, H.; Thompson, D.K.; Cantin, A.S.; et al. Development of the User Requirements for the Canadian WildFireSat Satellite Mission. Sensors 2020, 20, 5081. [Google Scholar] [CrossRef] [PubMed]
- Ngo Phong, L.; Dufour, D.; Johnston, J.; Chevalier, C.; Côté, P.; Fisette, B.; Wang, M.; Châteauneuf, F. A low resource imaging radiometer for nanosatellite based fire diagnosis. In Infrared Remote Sensing and Instrumentation XXVI; Proc. SPIE: San Francisco, CA, USA, 2018; Volume 10765. [Google Scholar]
- Maza, I.; Caballero, F.; Capitán, J.; Martínez-de-Dios, J.R.; Ollero, A. Experimental Results in Multi-UAV Coordination for Disaster Management and Civil Security Applications. J. Intell. Robot. Syst. 2011, 61, 563–585. [Google Scholar] [CrossRef]
- Yuan, C.; Liu, Z.; Zhang, Y. UAV-based forest fire detection and tracking using image processing techniques. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015. [Google Scholar]
- Fraser, R.; van der Sluijs, J.; Hall, R. Calibrating Satellite-Based Indices of Burn Severity from UAV-Derived Metrics of a Burned Boreal Forest in NWT, Canada. Remote Sens. 2017, 9, 279. [Google Scholar] [CrossRef] [Green Version]
- Sherstjuk, V.; Zharikova, M.; Sokol, I. Forest Fire-Fighting Monitoring System Based on UAV Team and Remote Sensing. In Proceedings of the 2018 IEEE 38th International Conference on Electronics and Nanotechnology (ELNANO), Kyiv, Ukraine, 24–26 April 2018. [Google Scholar]
- Marraco, H.; Ngo Phong, L. NIRST: A satellite-based IR instrument for fire and sea surface temperature measurement. In Non-Intrusive Inspection Technologies; Proc. SPIE: San Francisco, CA, USA, 2006; Volume 6213. [Google Scholar]
- Fisette, B.; Tremblay, M.; Oulachgar, H.; Généreux, F.; Béland, D.; Beaupré, P.; Julien, C.; Gay, D.; Deshaies, S.; Tremblay, B.; et al. Novel vacuum packaged 384 × 288 broadband bolometer FPA with enhanced absorption in the 3–14 μm wavelength range. In Infrared Technology and Applications XLIII; Proc. SPIE: San Francisco, CA, USA, 2017; Volume 10177. [Google Scholar]
- Marchese, L.; Terroux, M.; Généreux, F.; Tremblay, B.; Bolduc, M.; Bergeron, A. Review of the characteristics of 384 × 288 pixel THz camera for seethrough imaging. In Millimetre Wave and Terahertz Sensors and Technology VI; Proc. SPIE: San Francisco, CA, USA, 2013; Volume 8900. [Google Scholar]
- Béland, D.; Spisser, H.; Dufour, D.; Le Noc, L.; Picard, F.; Topart, P. Portable LWIR hyperspectral imager based on MEMS Fabry-Perot interferometer and broadband microbolometric detector array. In MOEMS and Miniaturized Systems XVII; Proc. SPIE: San Francisco, CA, USA, 2018; Volume 10545. [Google Scholar]
- Ngo Phong, L.; Pancrati, O.; Marchese, M.; Châteauneuf, F. Spaceborne linear arrays of 512 × 3 microbolometers. In Reliability, Packaging, Testing, and Characterization of MOEMS/MEMS and Nanodevices XII; Proc. SPIE: San Francisco, CA, USA, 2013; Volume 8614, p. 86140N-1. [Google Scholar]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dufour, D.; Le Noc, L.; Tremblay, B.; Tremblay, M.N.; Généreux, F.; Terroux, M.; Vachon, C.; Wheatley, M.J.; Johnston, J.M.; Wotton, M.; et al. A Bi-Spectral Microbolometer Sensor for Wildfire Measurement. Sensors 2021, 21, 3690. https://doi.org/10.3390/s21113690
Dufour D, Le Noc L, Tremblay B, Tremblay MN, Généreux F, Terroux M, Vachon C, Wheatley MJ, Johnston JM, Wotton M, et al. A Bi-Spectral Microbolometer Sensor for Wildfire Measurement. Sensors. 2021; 21(11):3690. https://doi.org/10.3390/s21113690
Chicago/Turabian StyleDufour, Denis, Loïc Le Noc, Bruno Tremblay, Mathieu N. Tremblay, Francis Généreux, Marc Terroux, Carl Vachon, Melanie J. Wheatley, Joshua M. Johnston, Mike Wotton, and et al. 2021. "A Bi-Spectral Microbolometer Sensor for Wildfire Measurement" Sensors 21, no. 11: 3690. https://doi.org/10.3390/s21113690
APA StyleDufour, D., Le Noc, L., Tremblay, B., Tremblay, M. N., Généreux, F., Terroux, M., Vachon, C., Wheatley, M. J., Johnston, J. M., Wotton, M., & Topart, P. (2021). A Bi-Spectral Microbolometer Sensor for Wildfire Measurement. Sensors, 21(11), 3690. https://doi.org/10.3390/s21113690