
Prototype Design and Experimental Evaluation of Autonomous Collaborative Communication System for Emerging Maritime Use Cases

 , , , ,
, , , ,  , ,
, ,  and
and 
Abstract
:1. Introduction
2. State-of-the-Art and Related Work
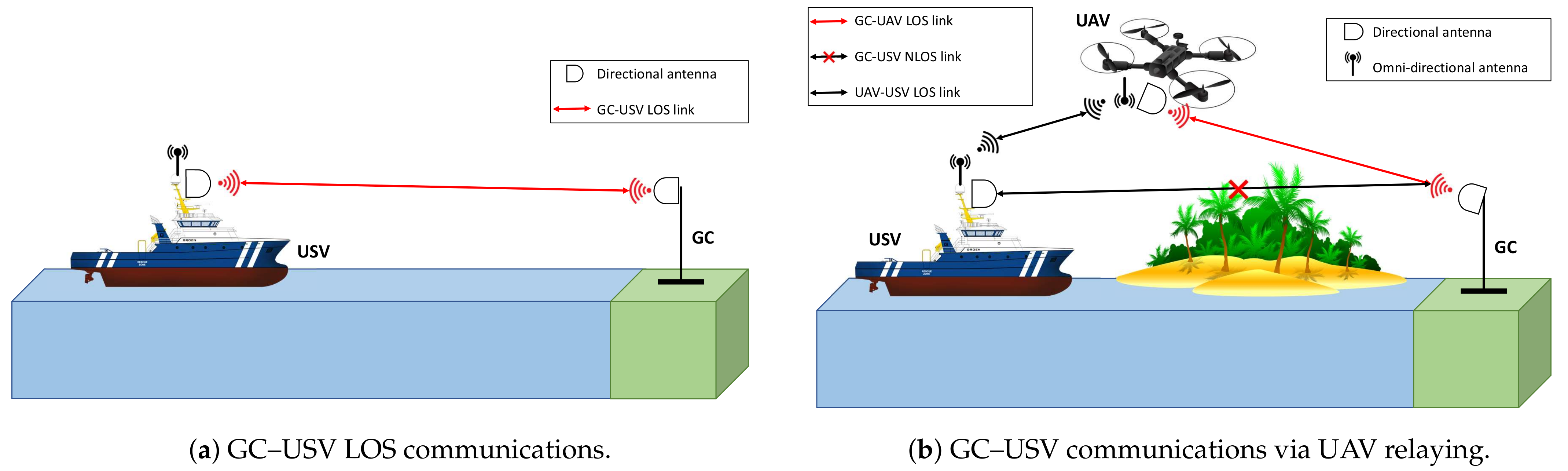
3. Proposed Communication Modes and Solution Components
3.1. Location-Based Beam-Steering Algorithm
3.2. Radio Propagation Models
3.2.1. FSPL Model
- —free space path loss (dB);
- —carrier frequency (MHz);
- d—distance between transmitter and receiver (km).
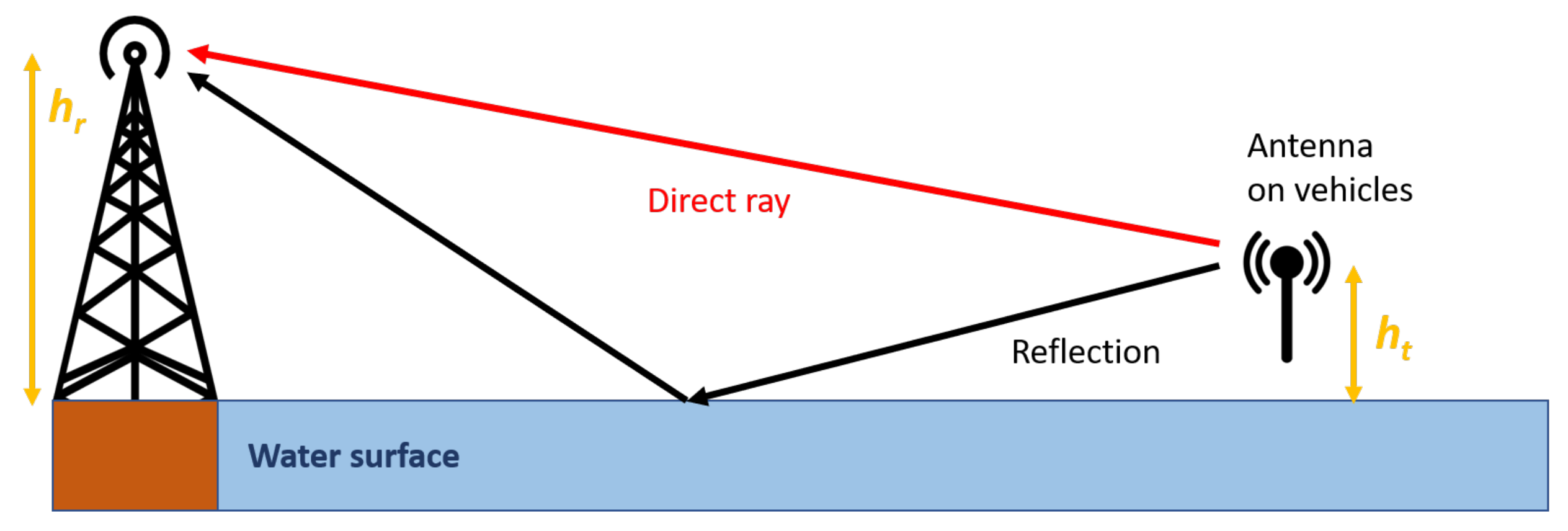
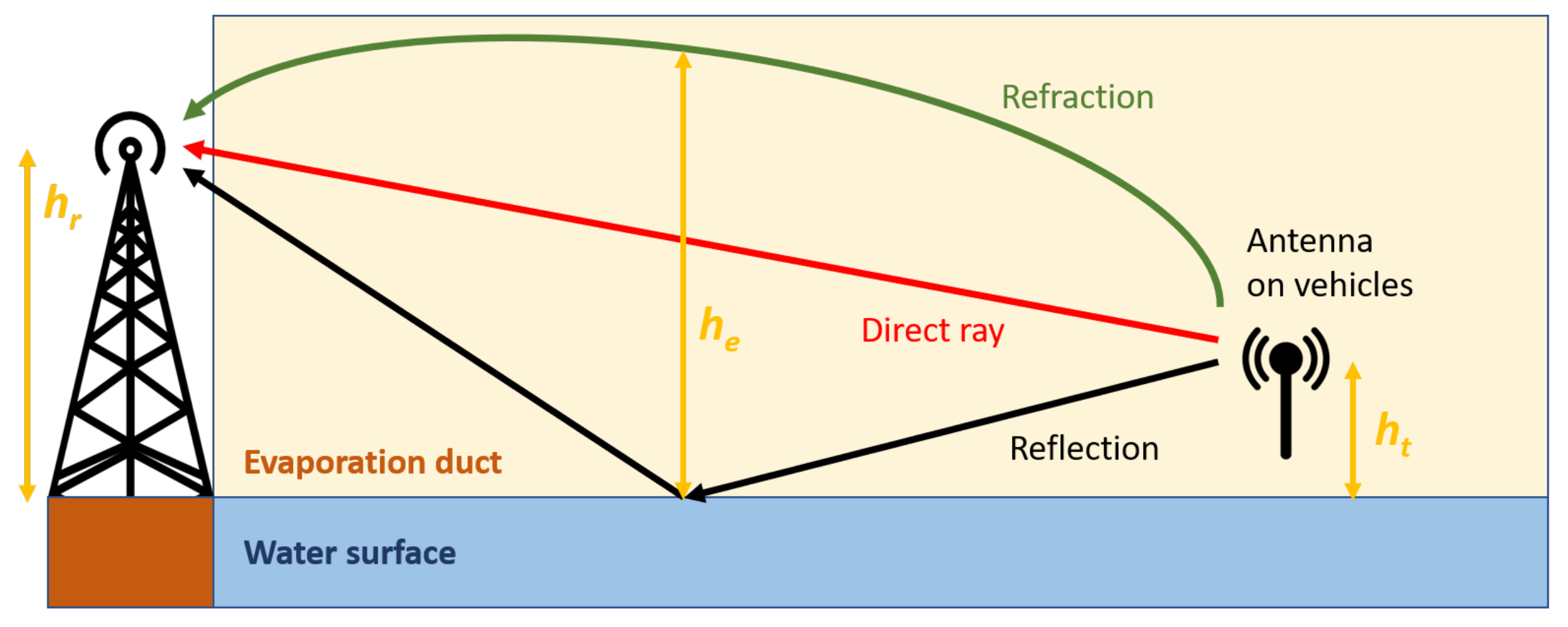
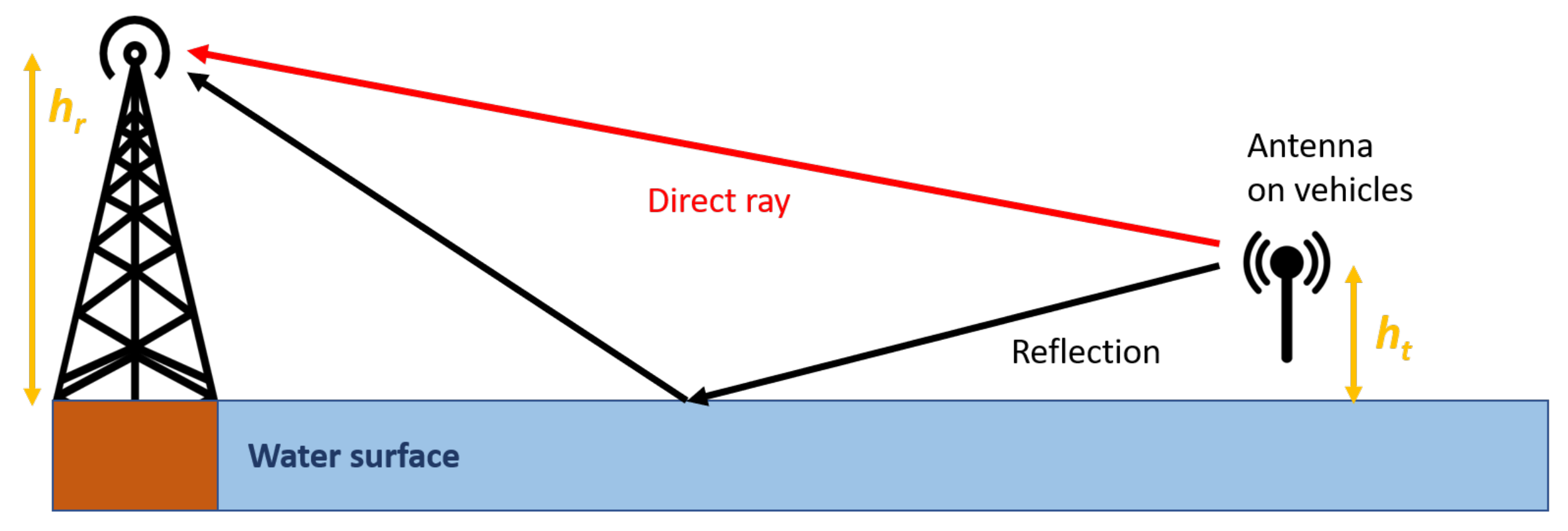
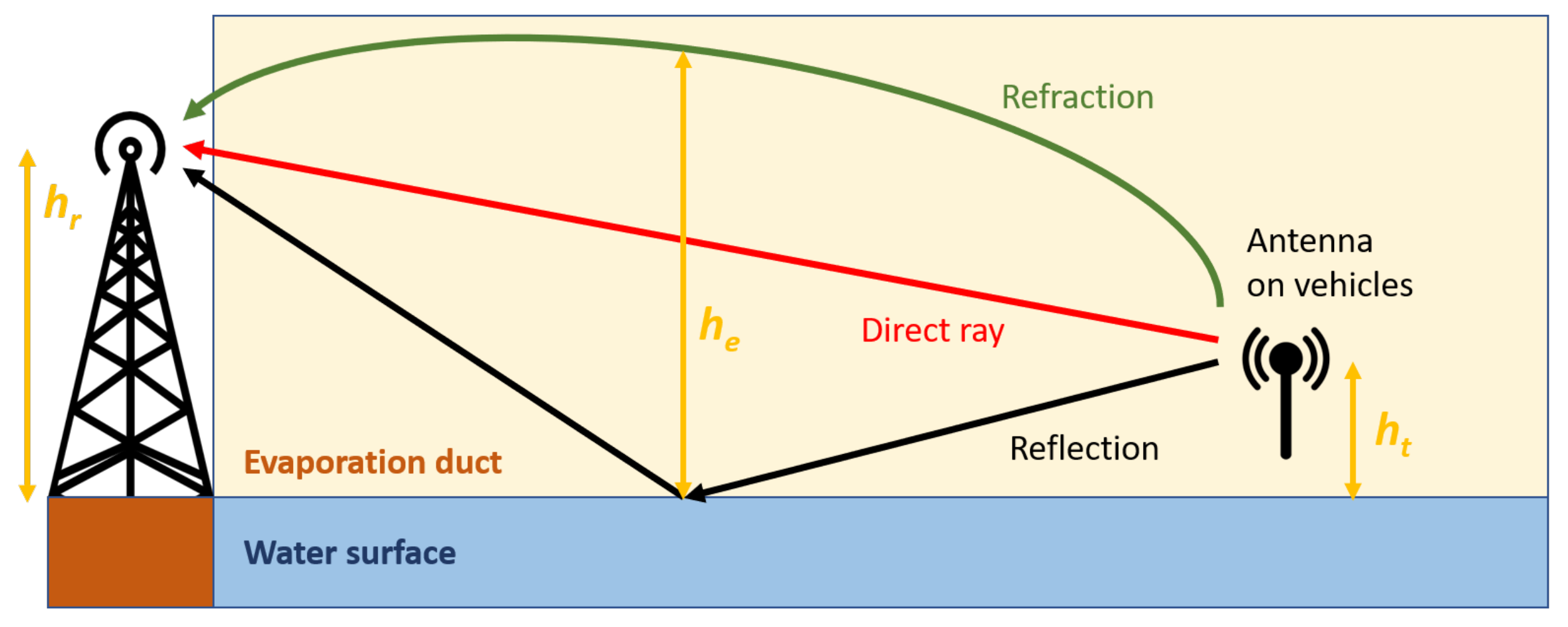
3.2.2. Near Sea-Surface Propagation Models
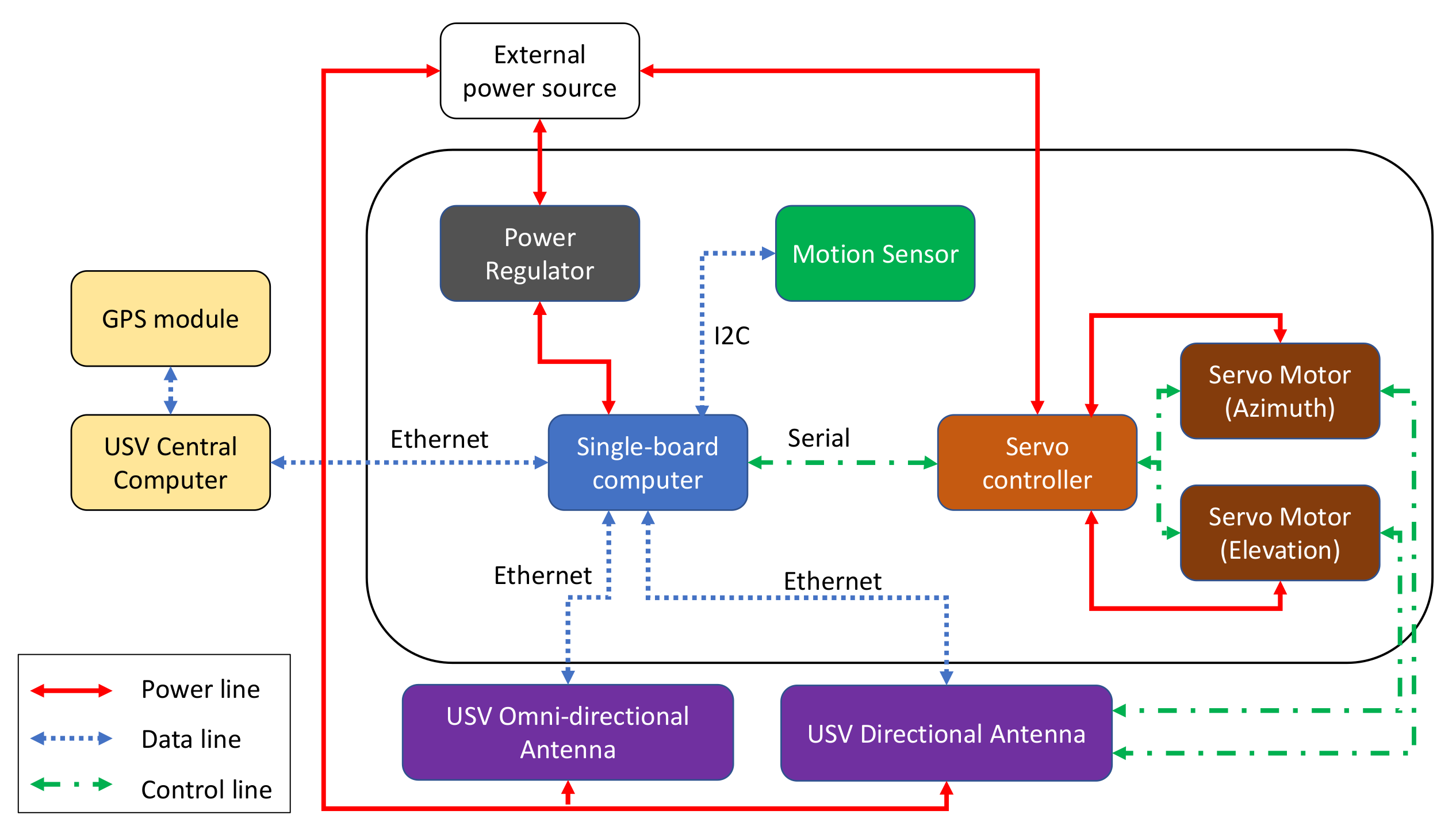
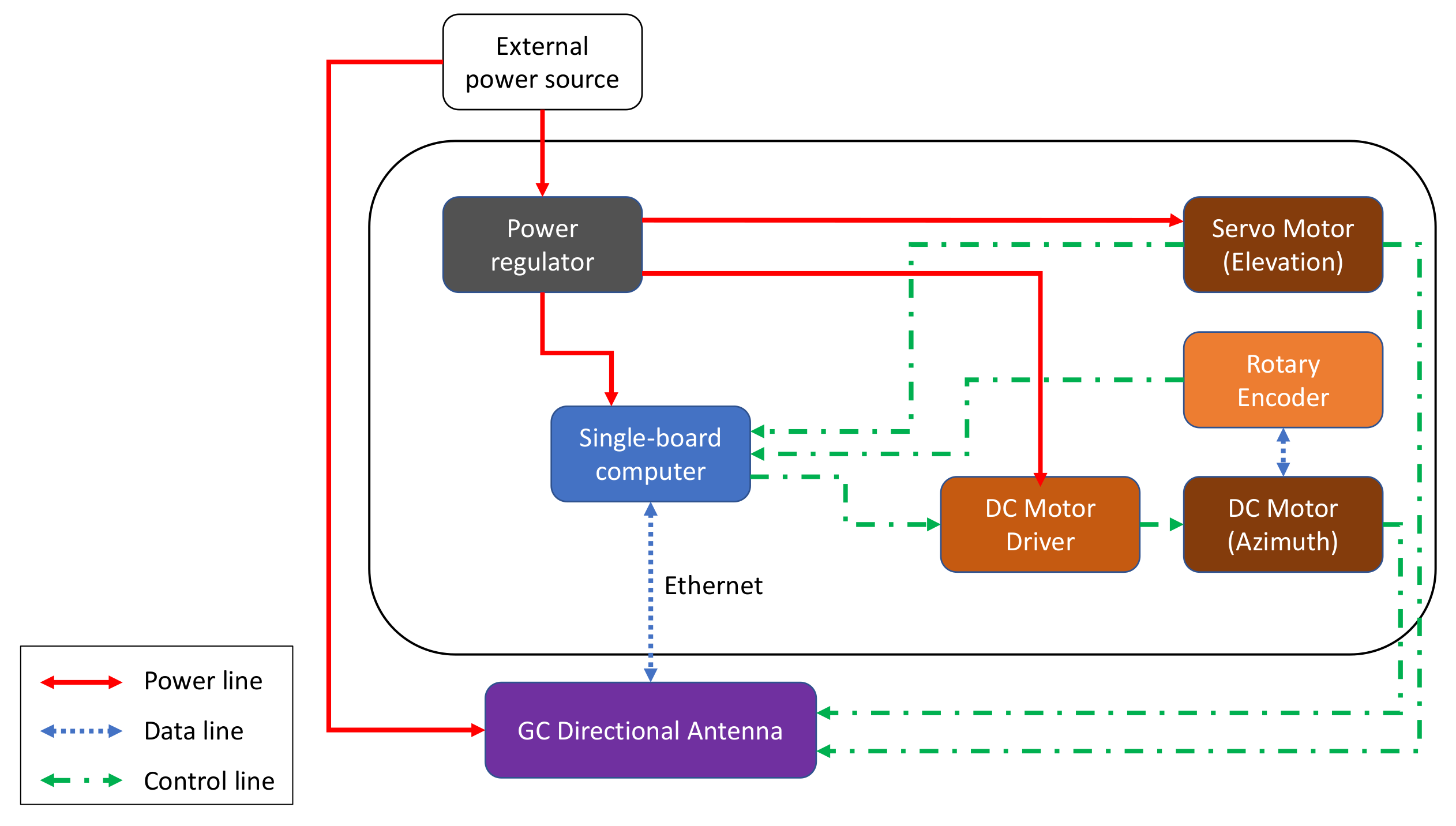
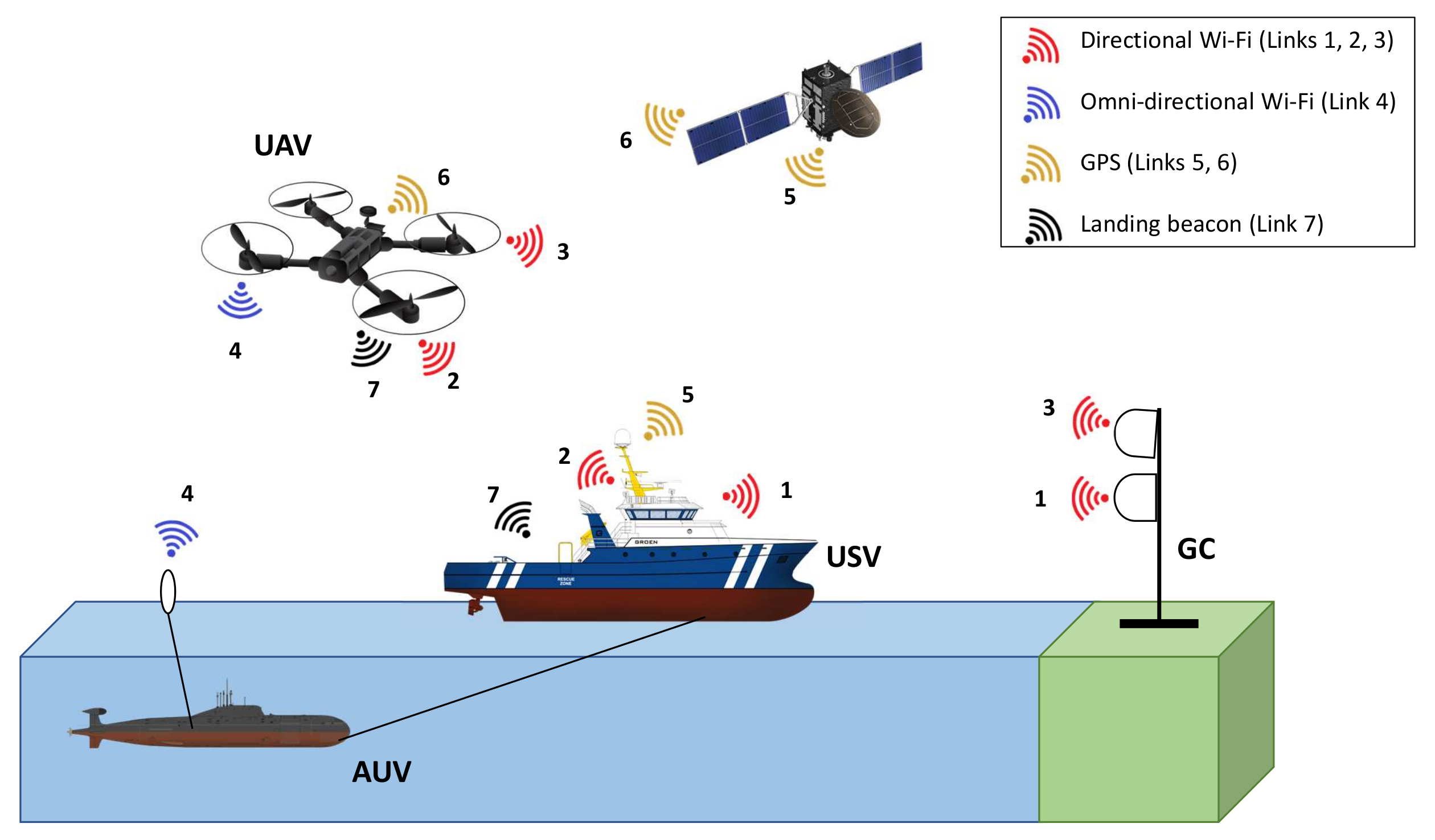
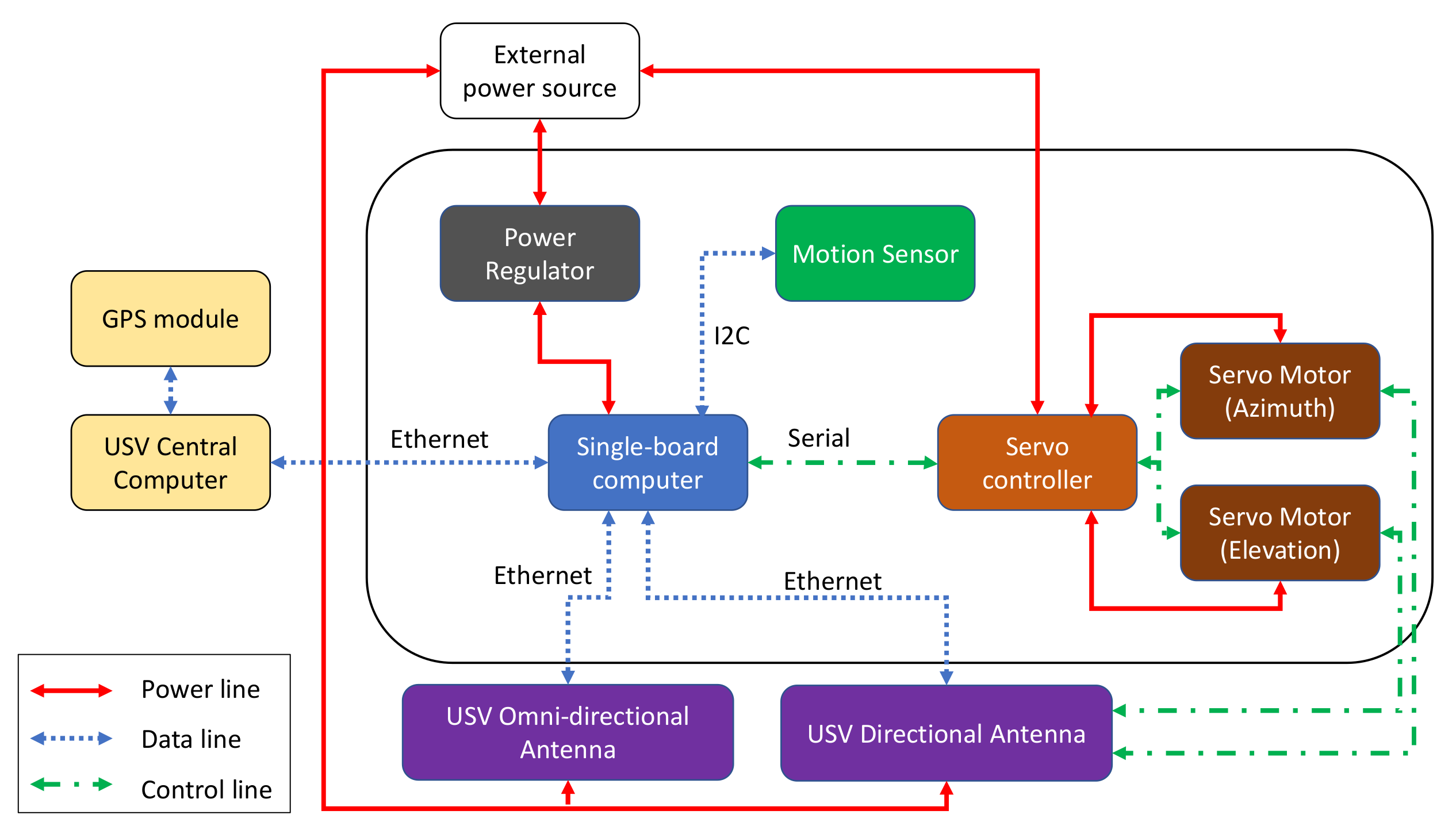
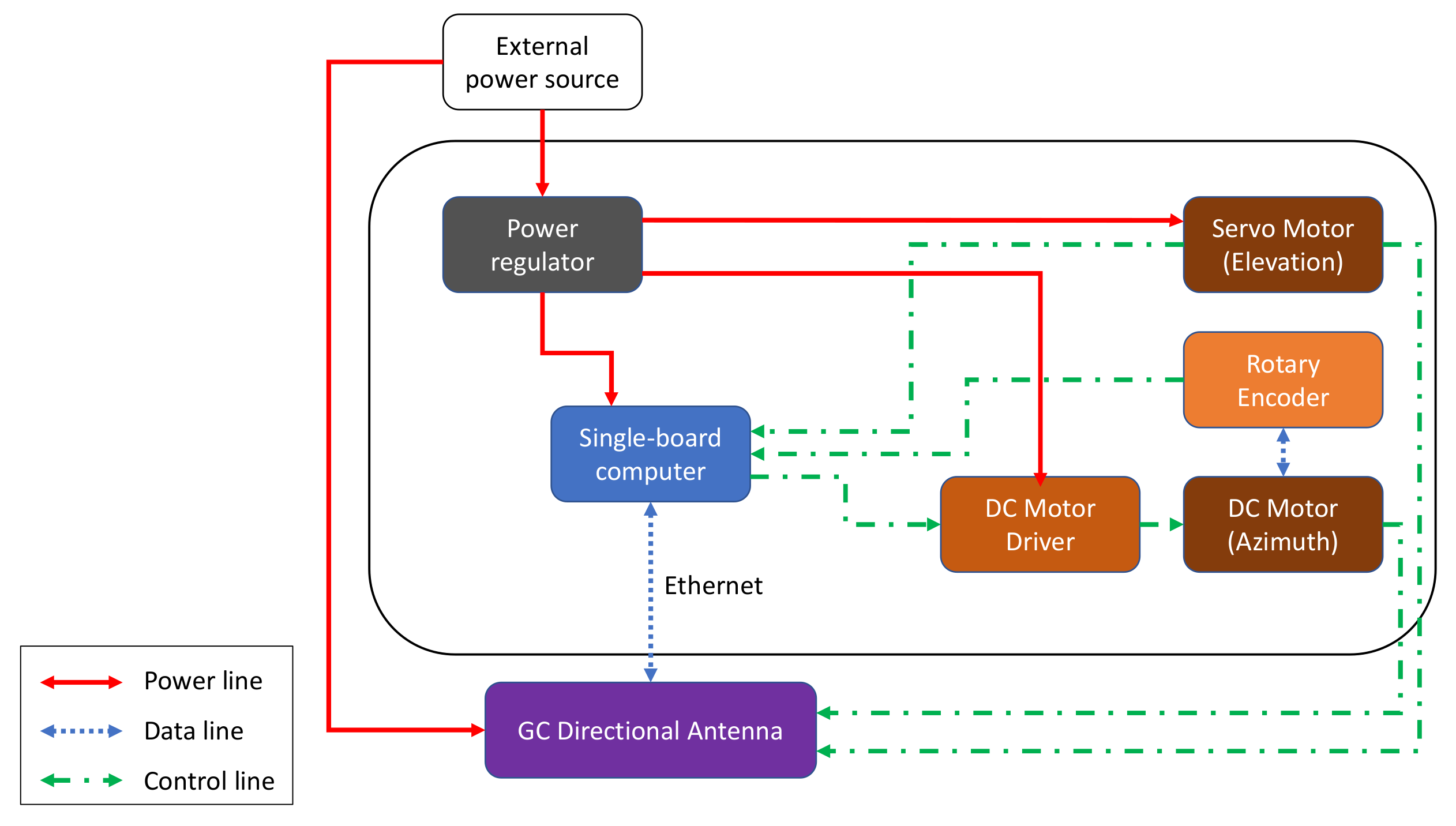
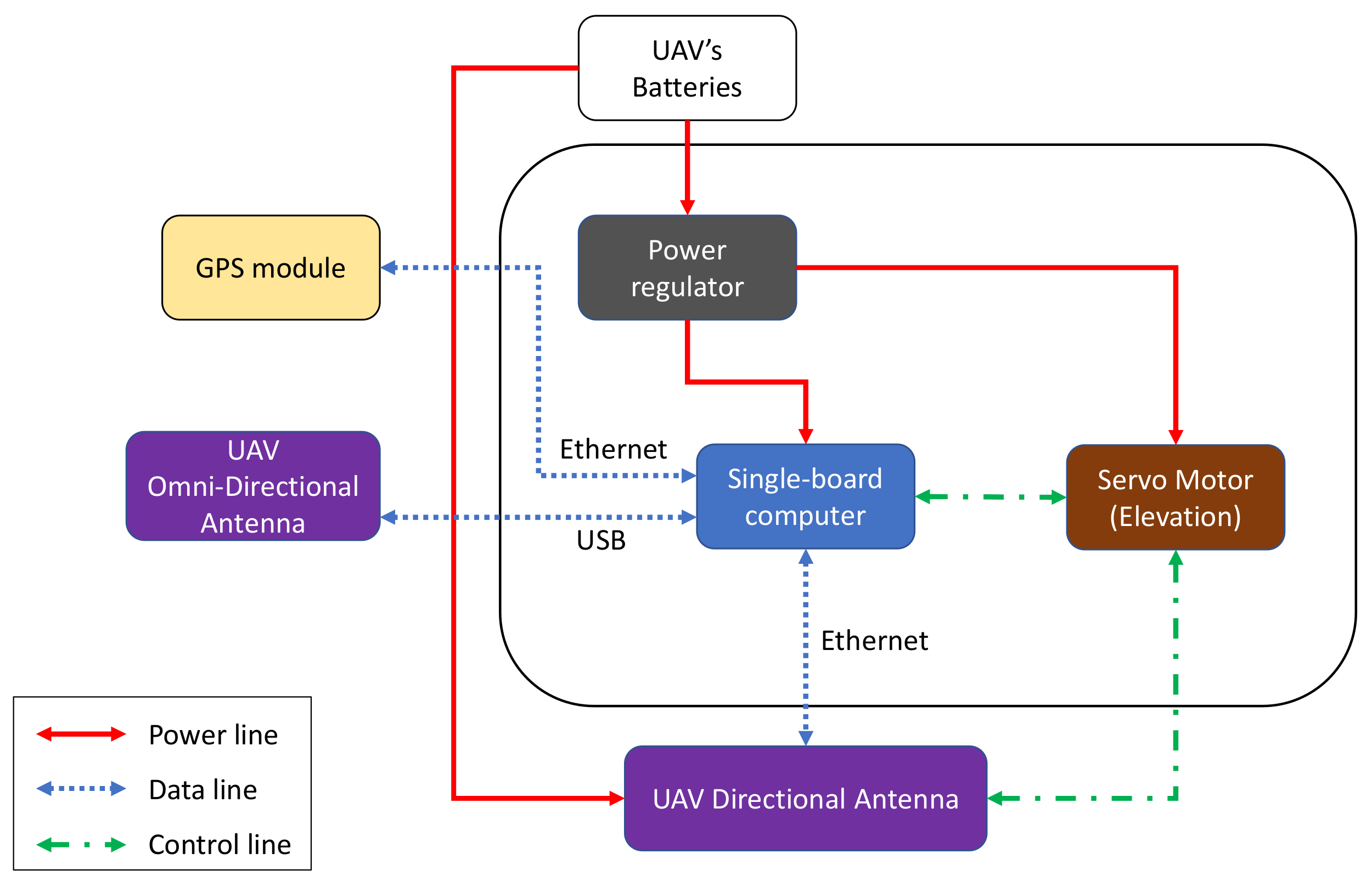
4. System Prototype Architecture
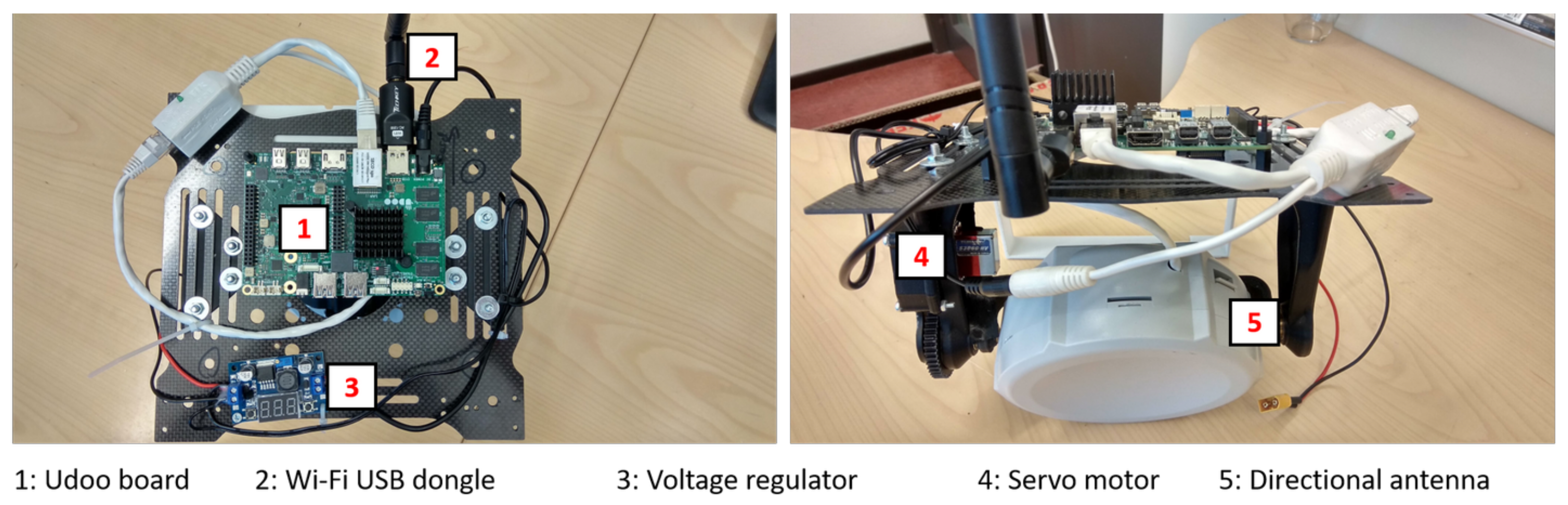
5. System Prototype Implementation
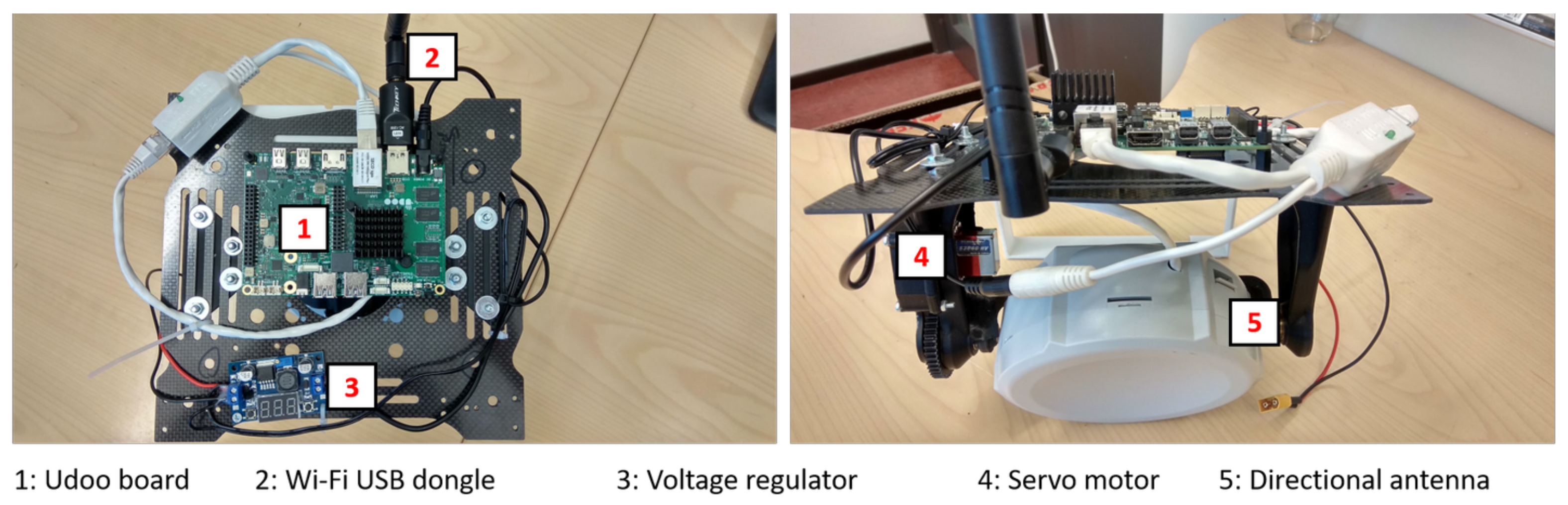
5.1. Single-Board Computers and Microcontrollers
5.2. Power Management
5.3. Networking Implementation
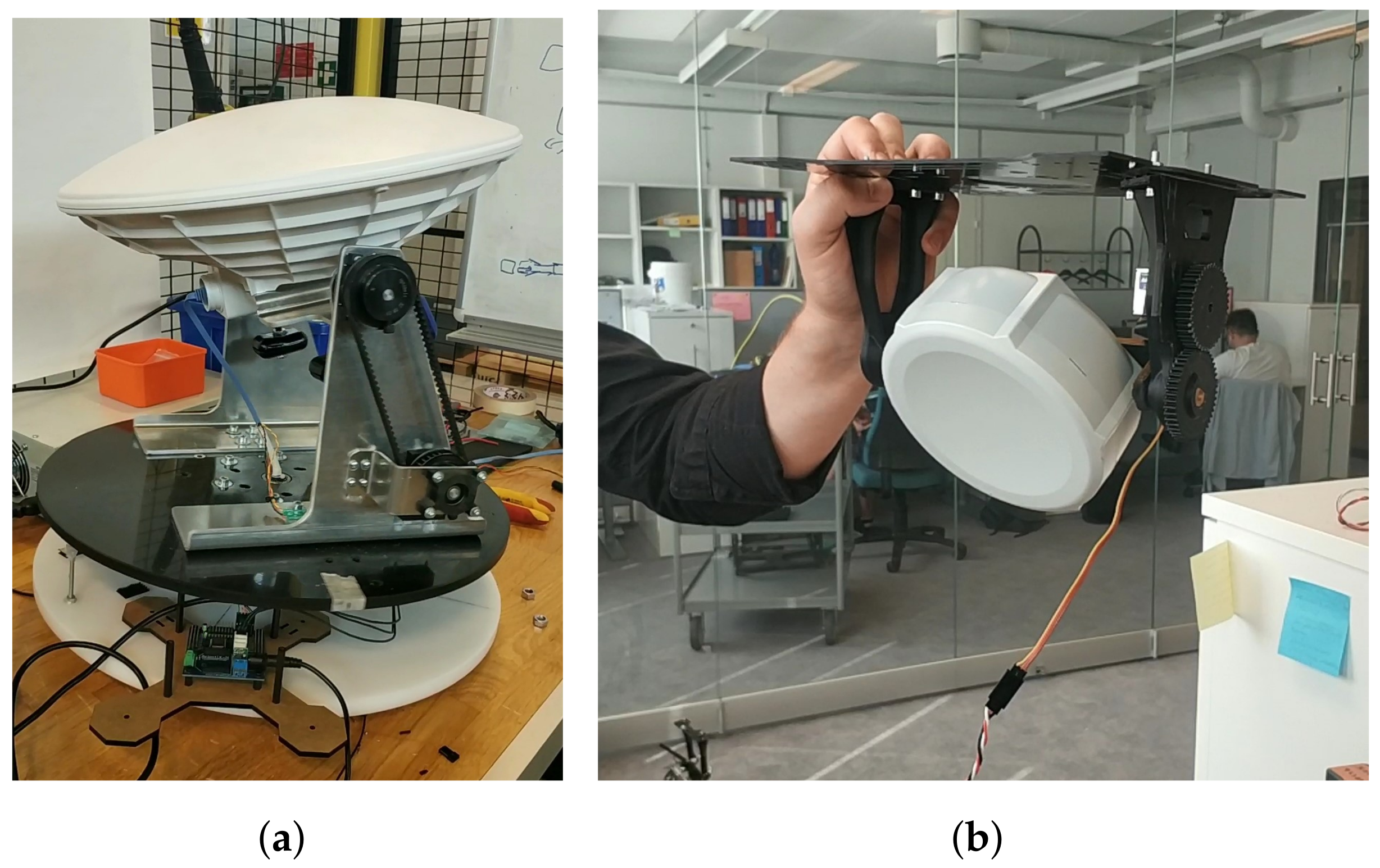
5.4. Method for Tilt Compensation of the USV Antenna
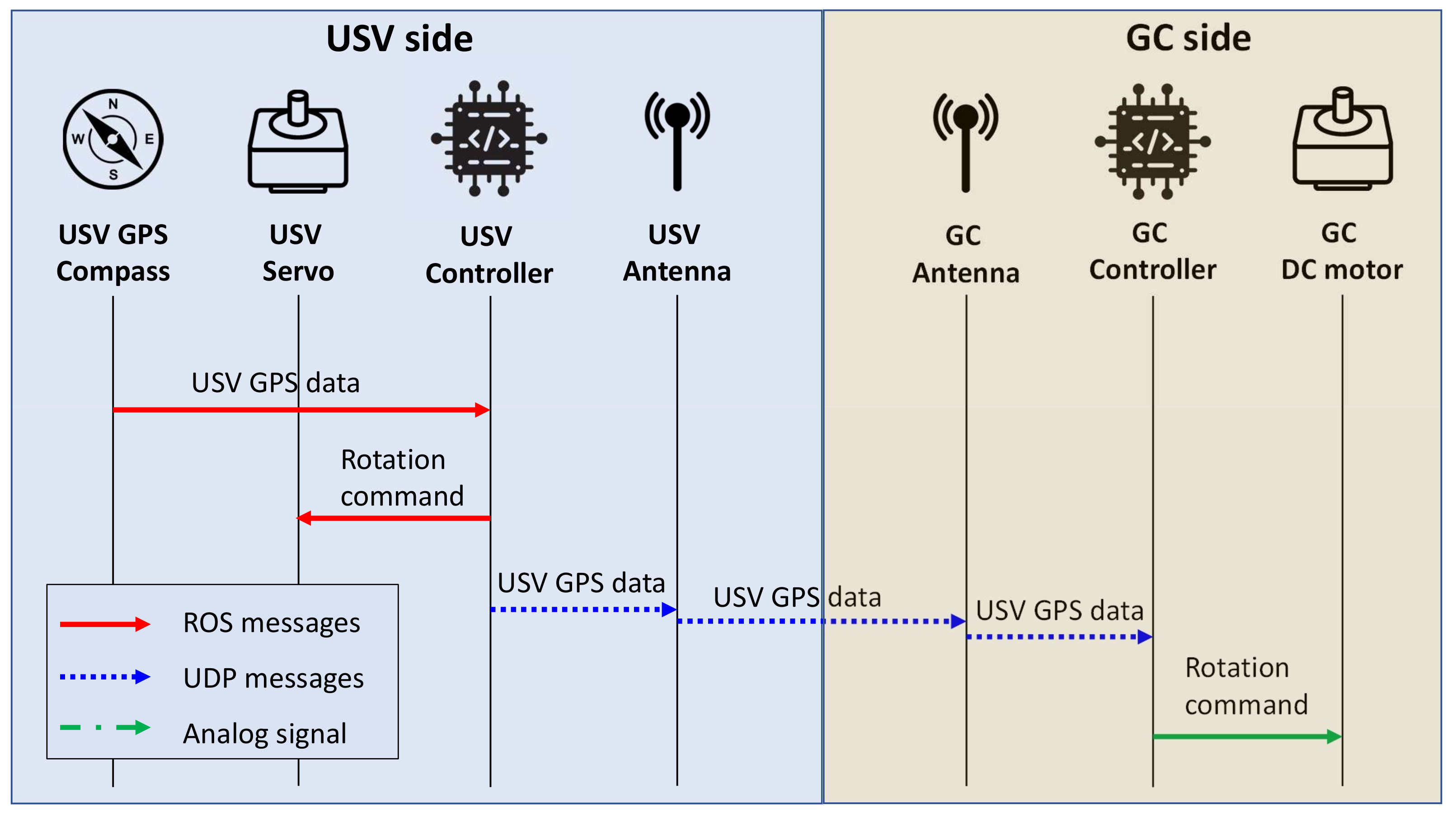
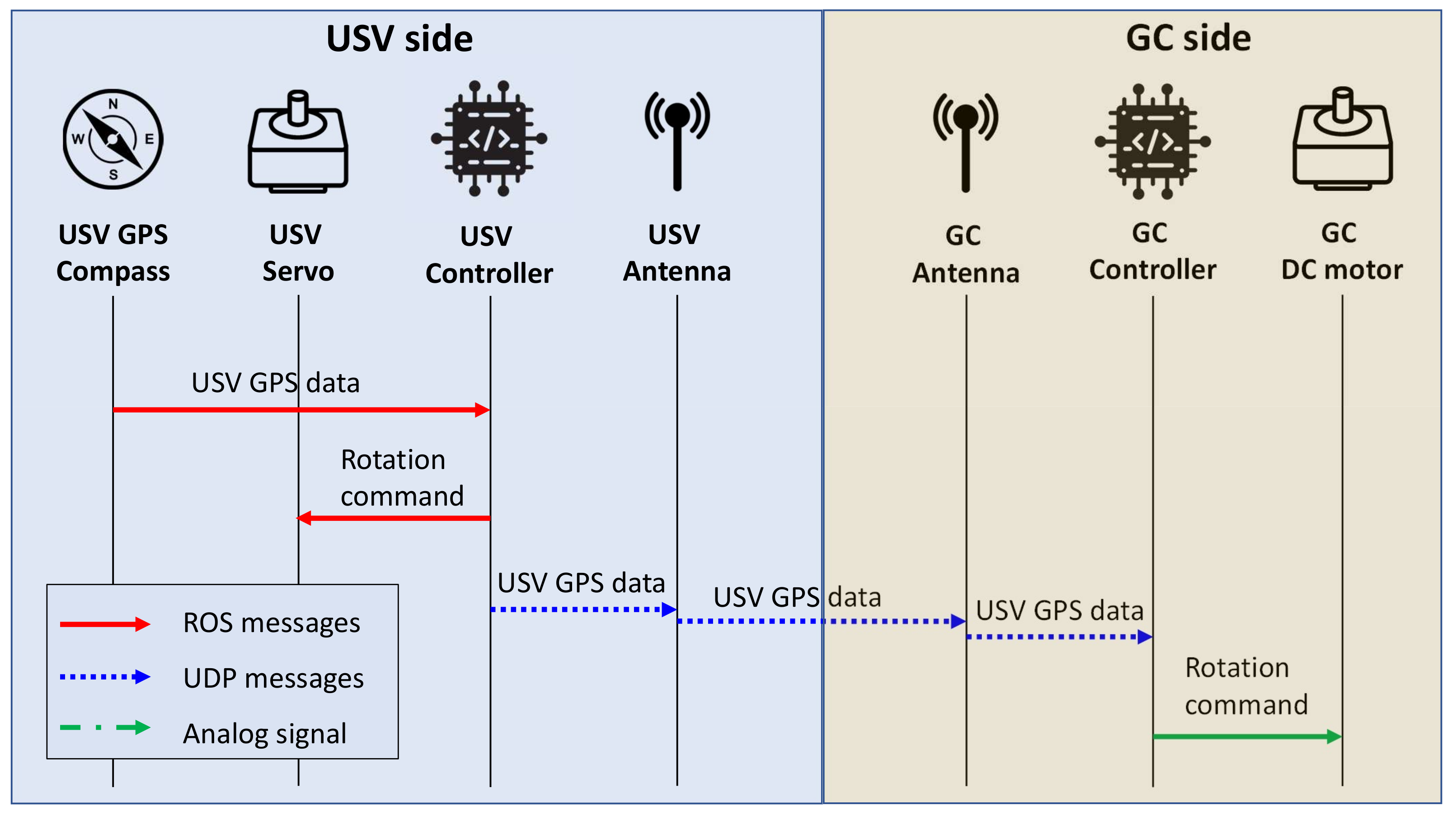
5.5. GPS and Control Message Exchange Methods
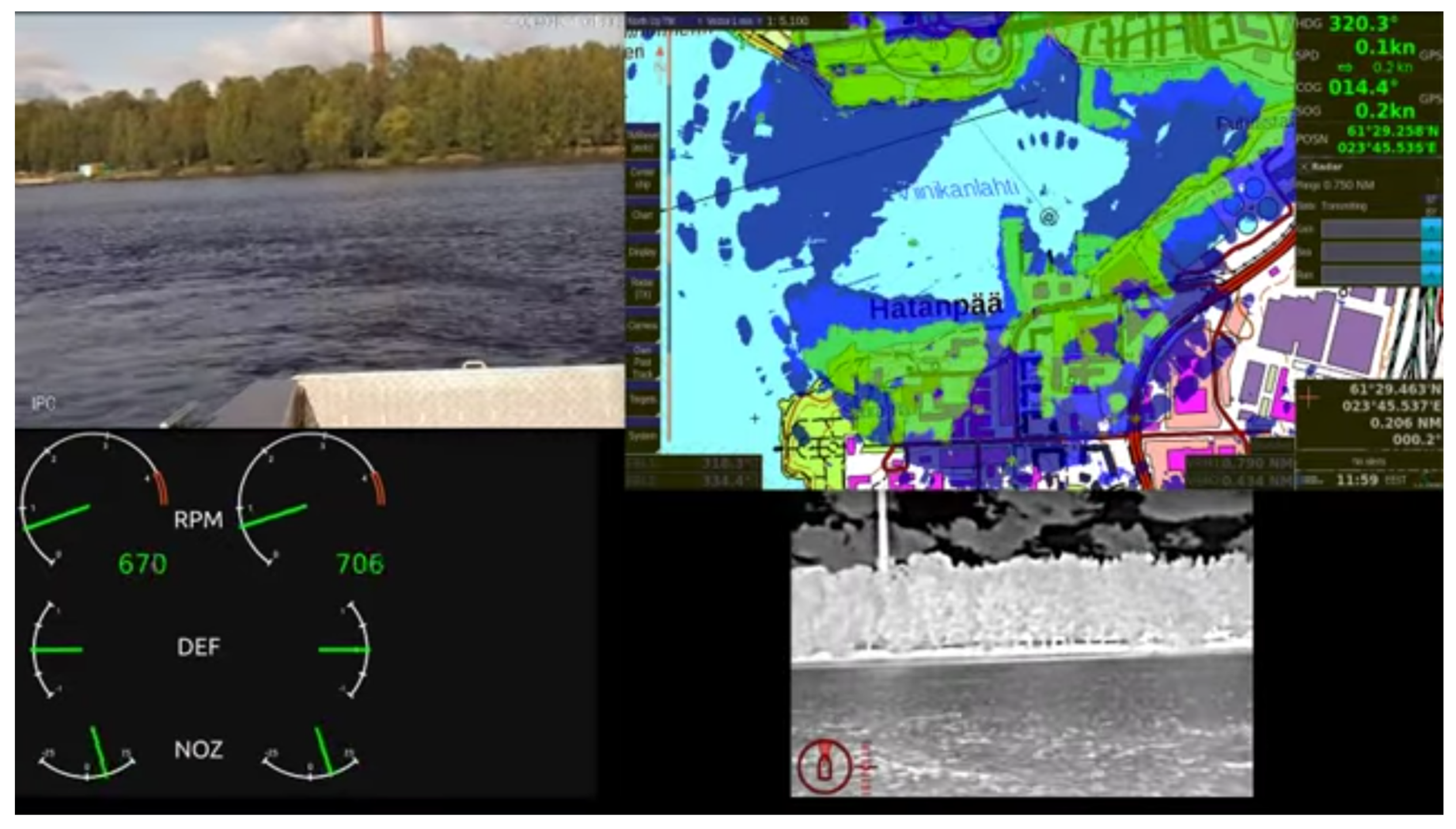
6. Experimental Results and Performance Evaluation
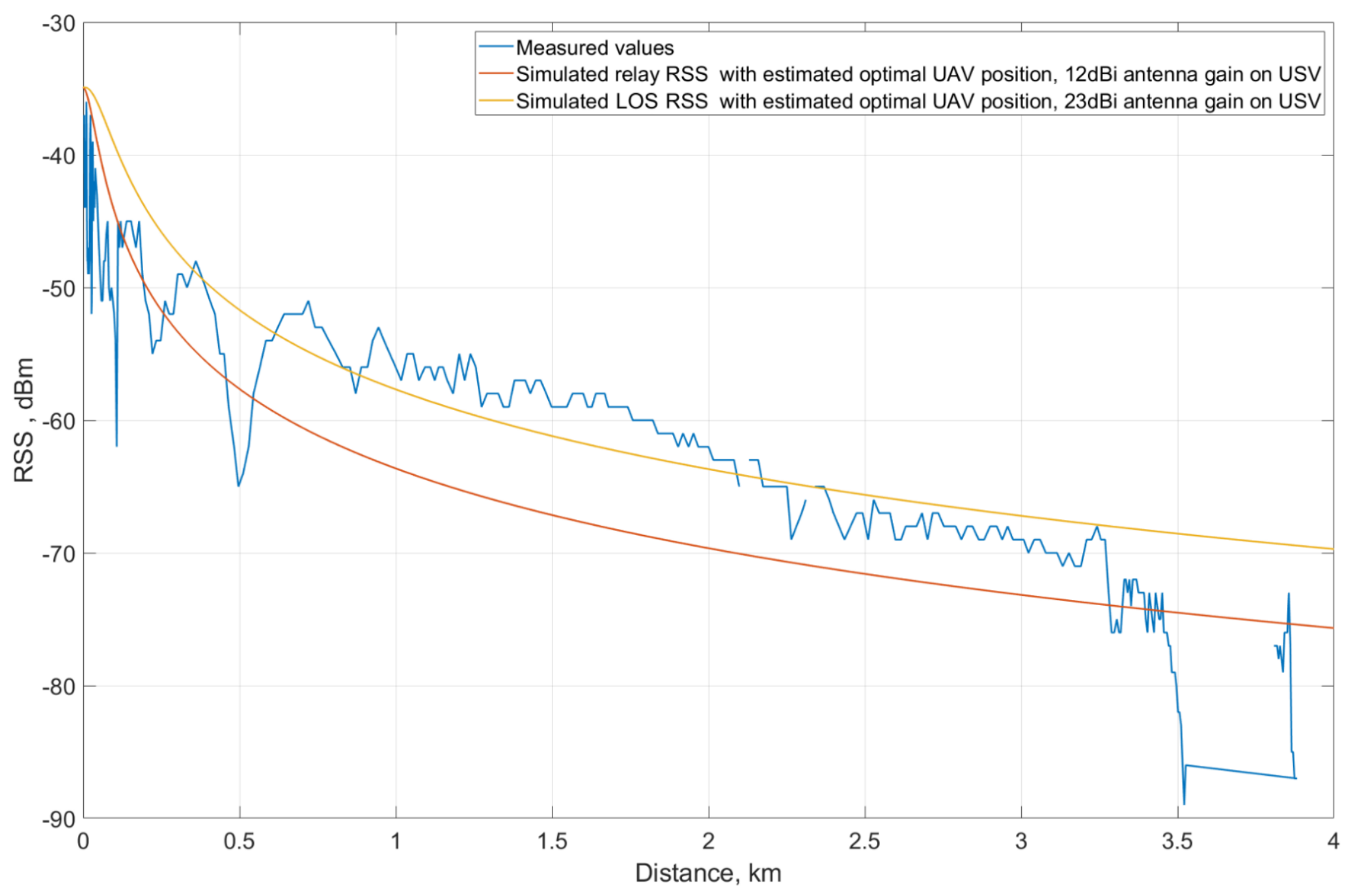
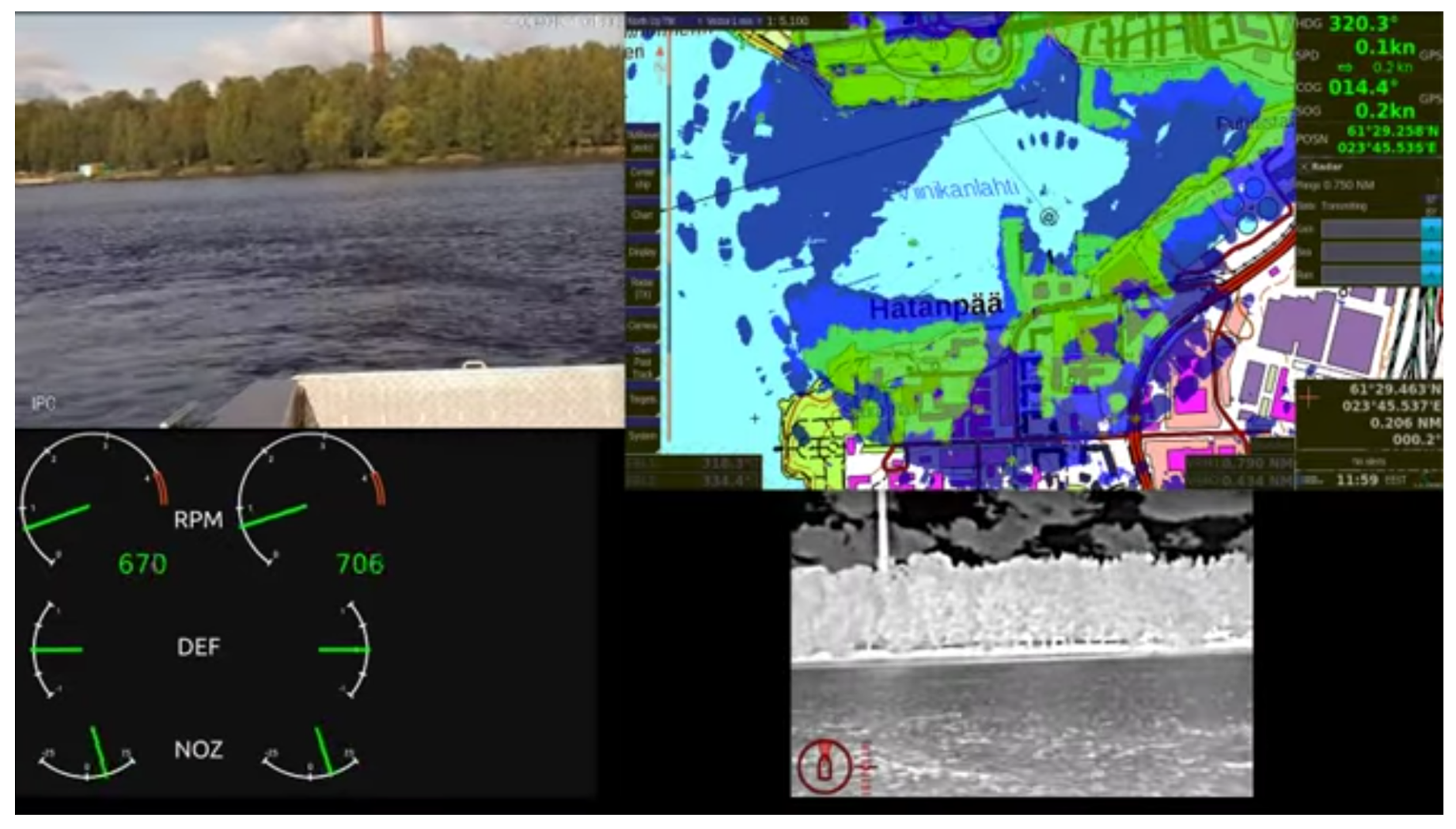
6.1. LOS Communication Mode
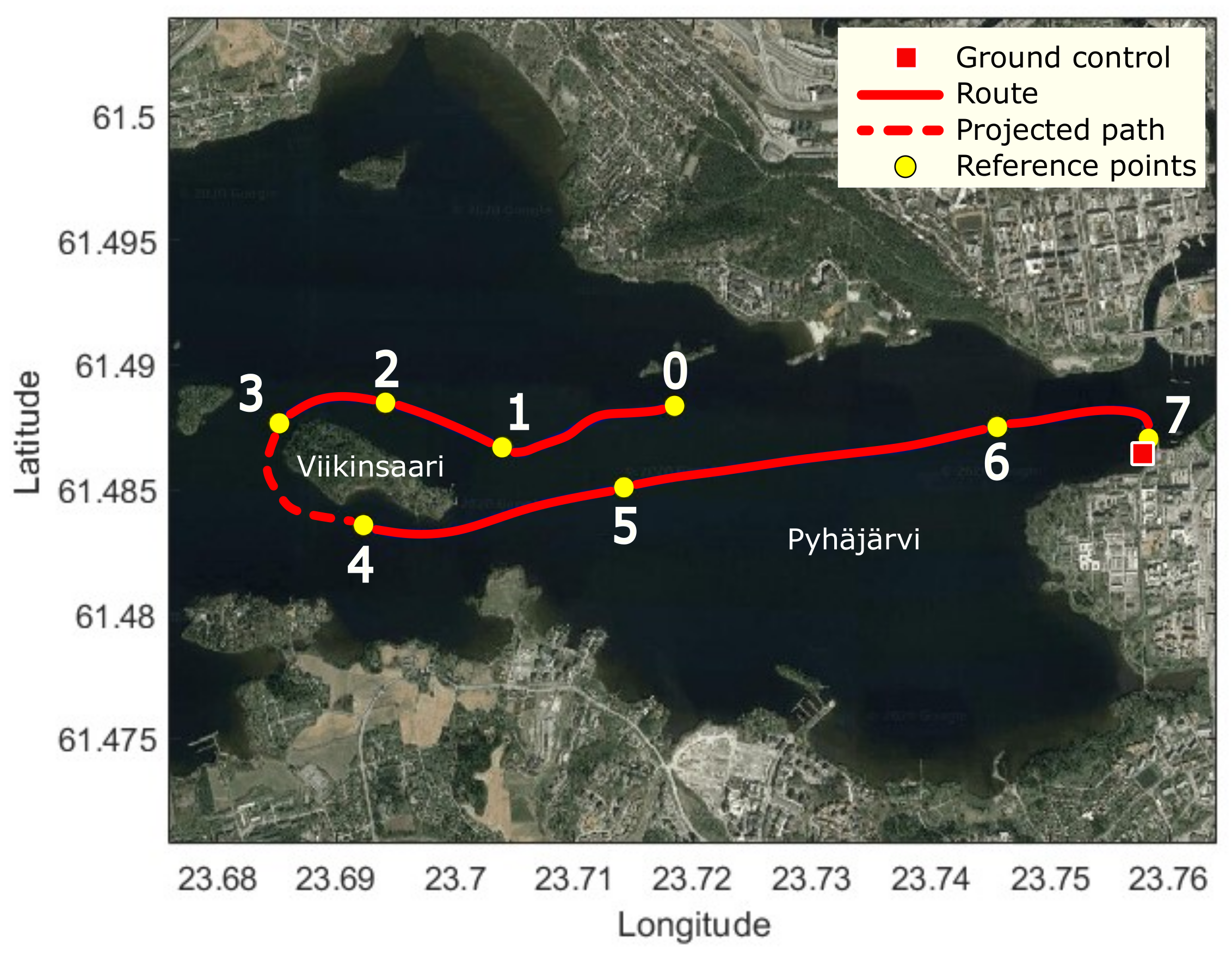
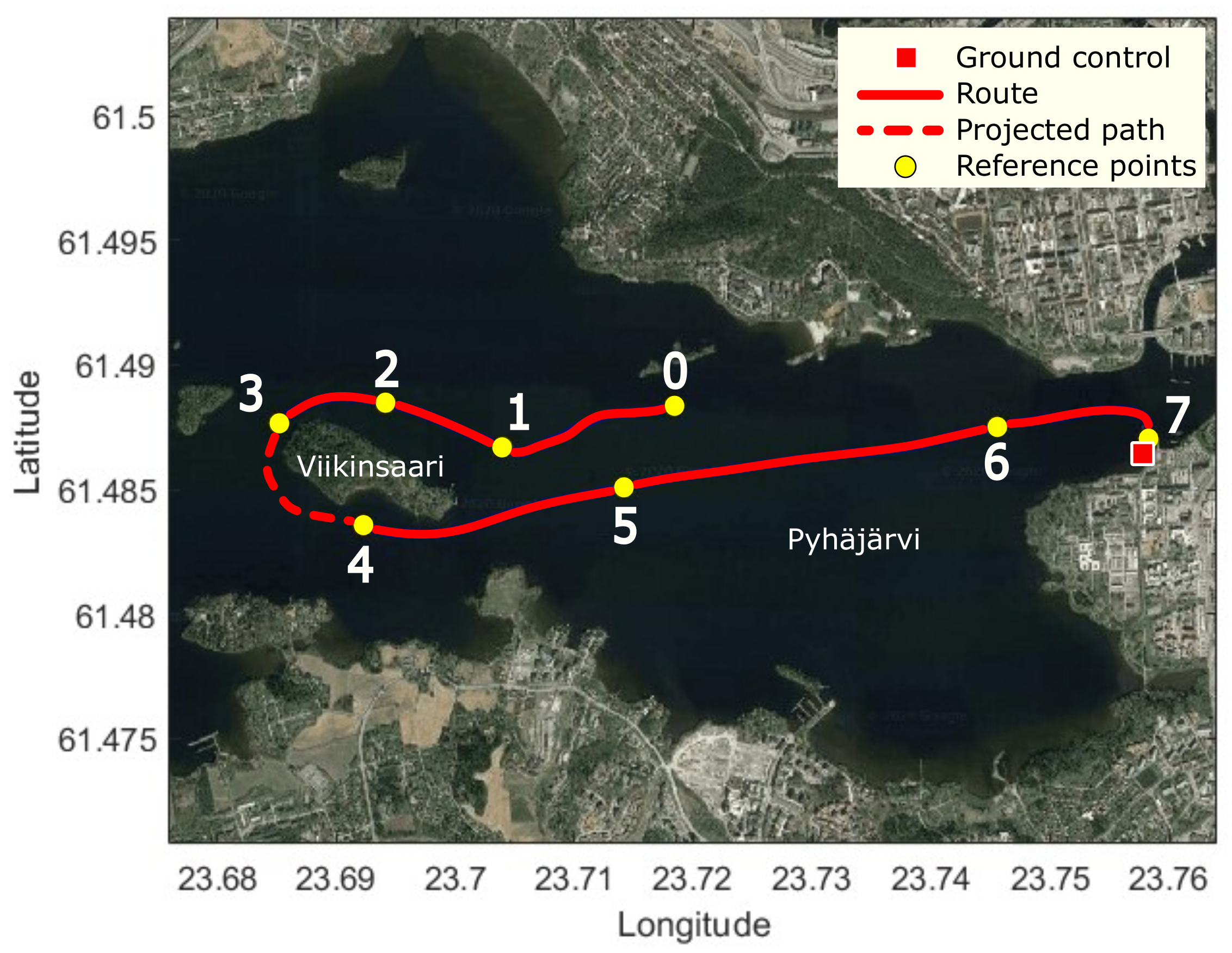
6.1.1. Measurement Scenario
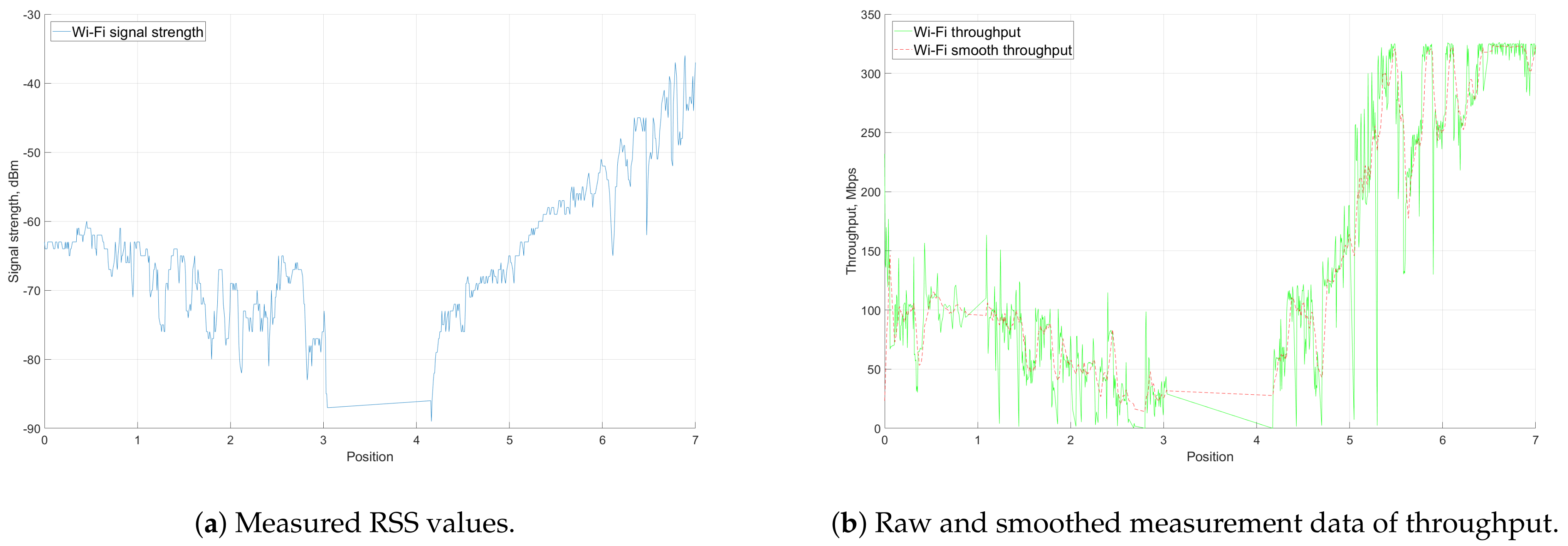
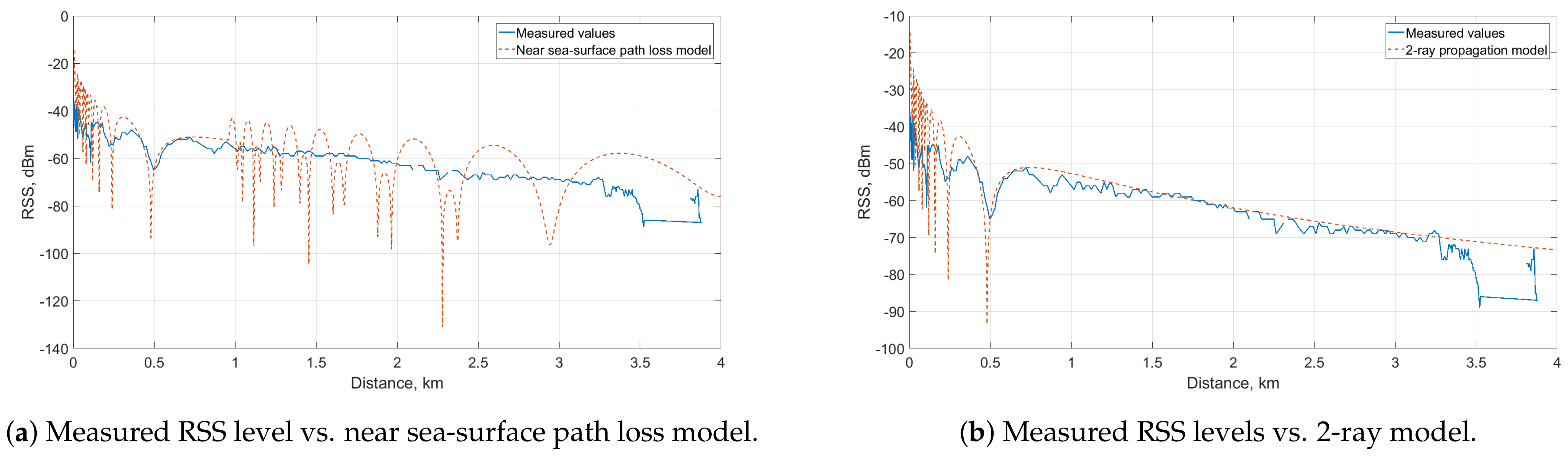
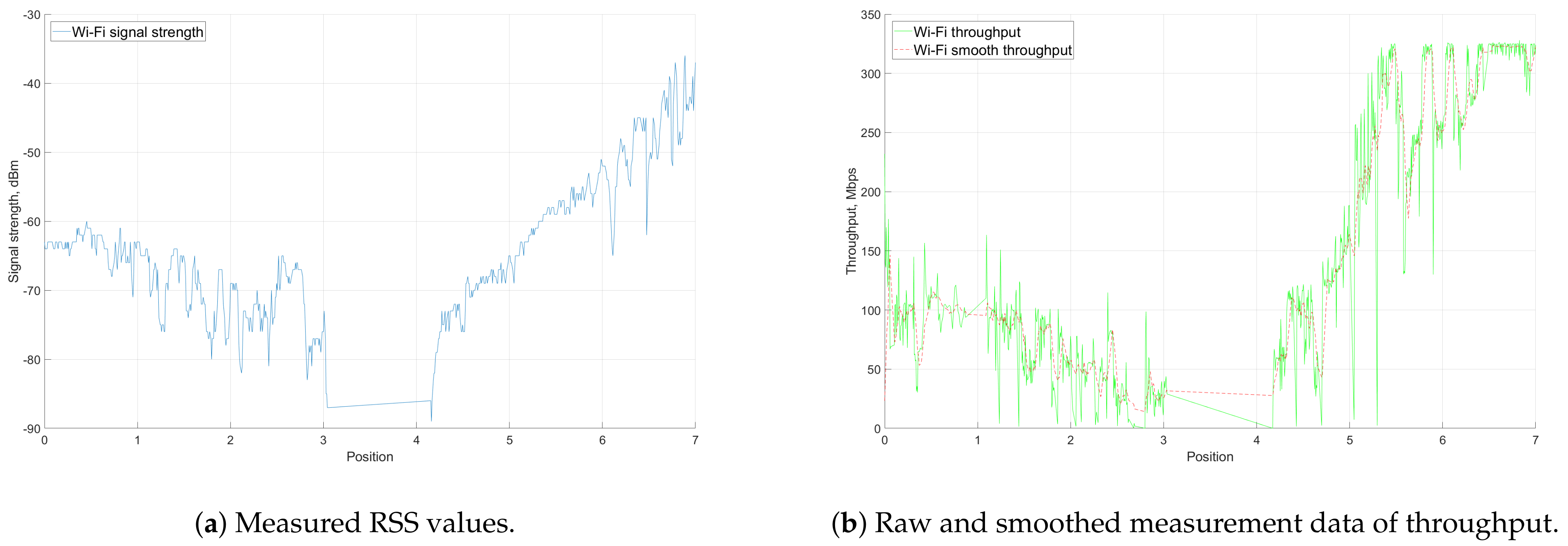
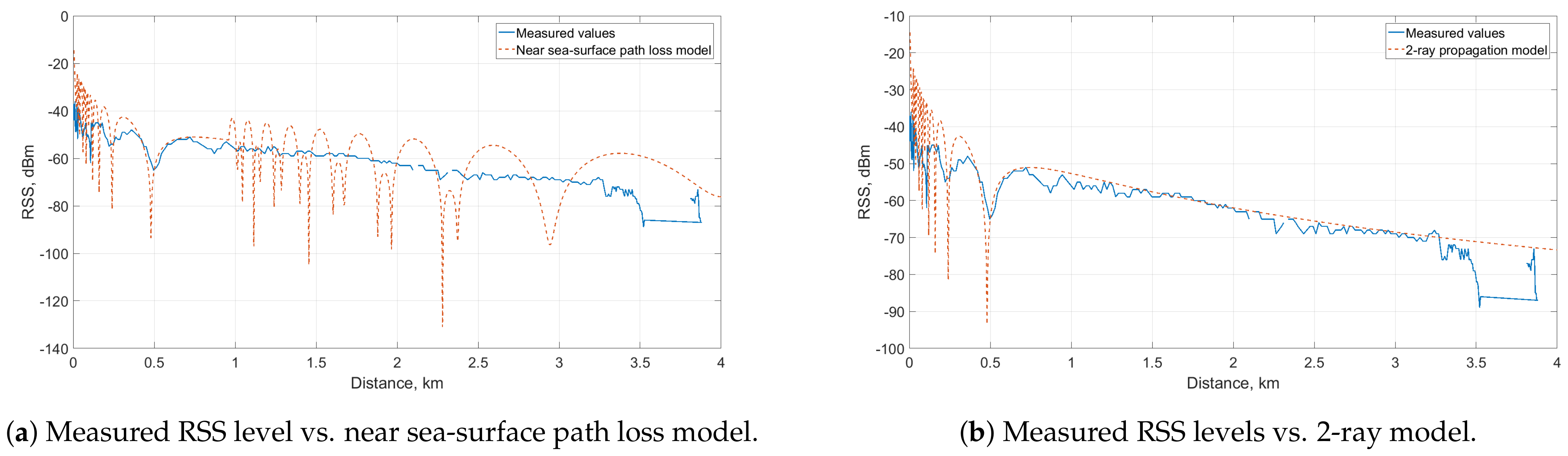
6.1.2. Measurement Results
6.1.3. Simulations and Evaluation
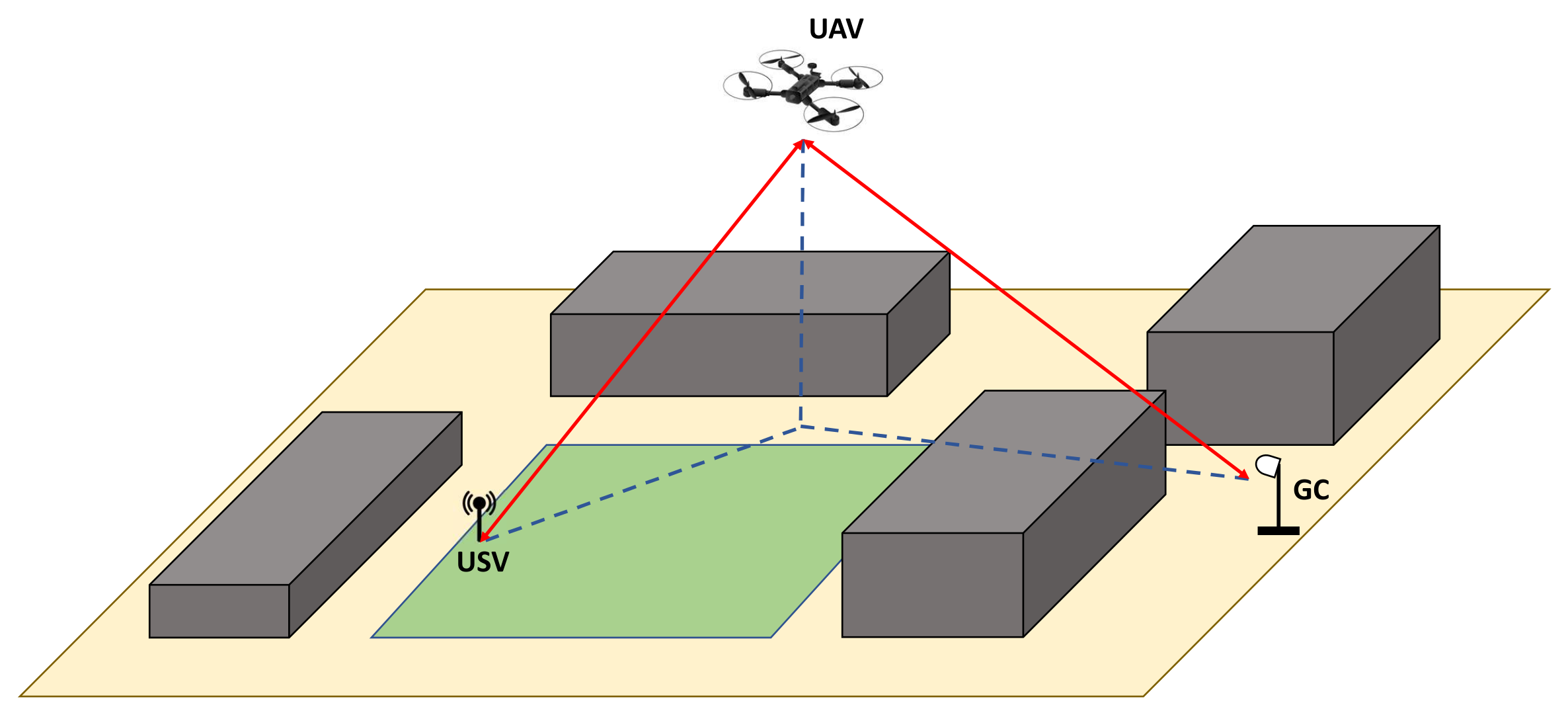
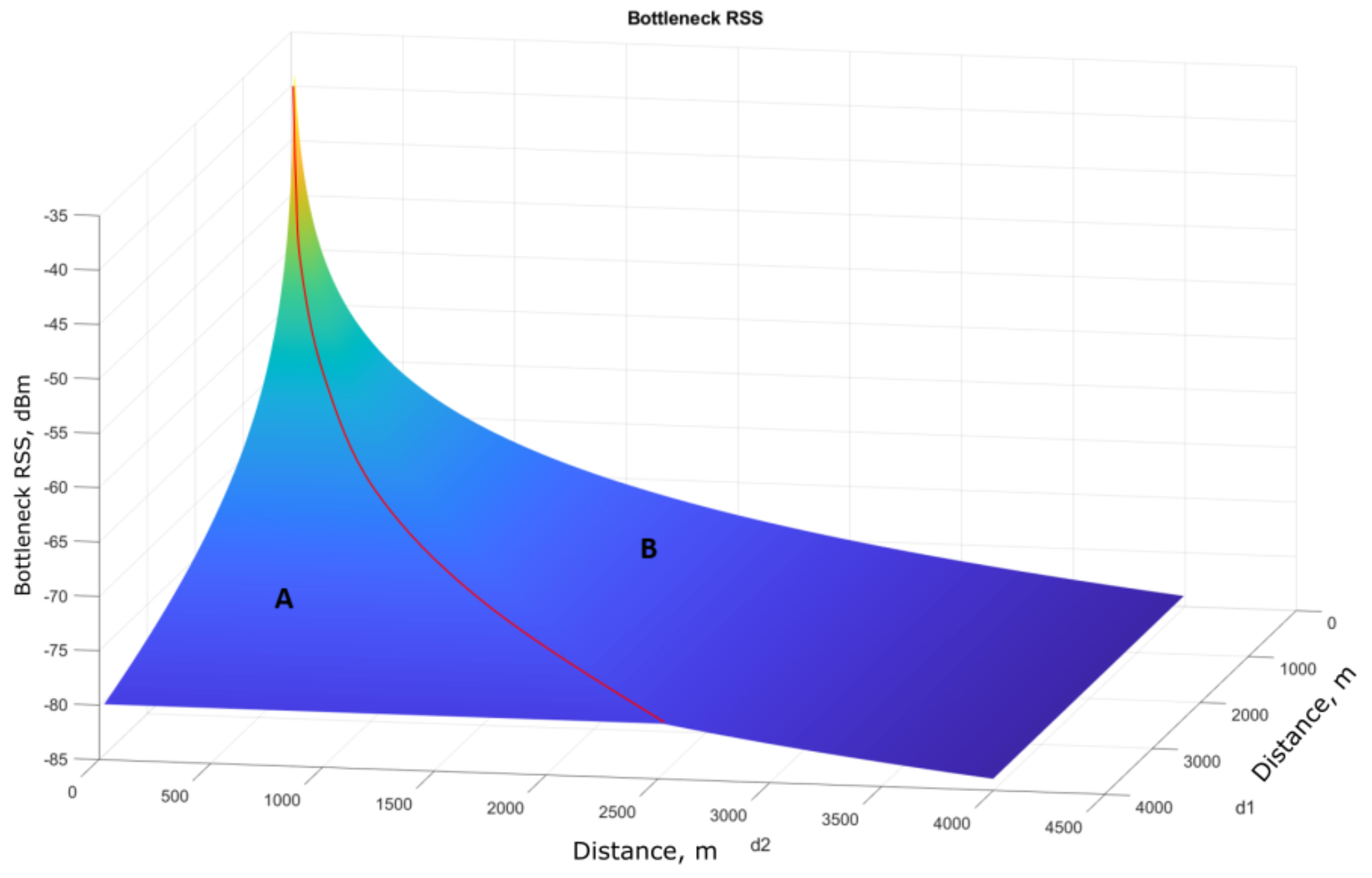
6.2. Relay Communication Mode
6.2.1. Measurement Scenario
6.2.2. Measurement Results
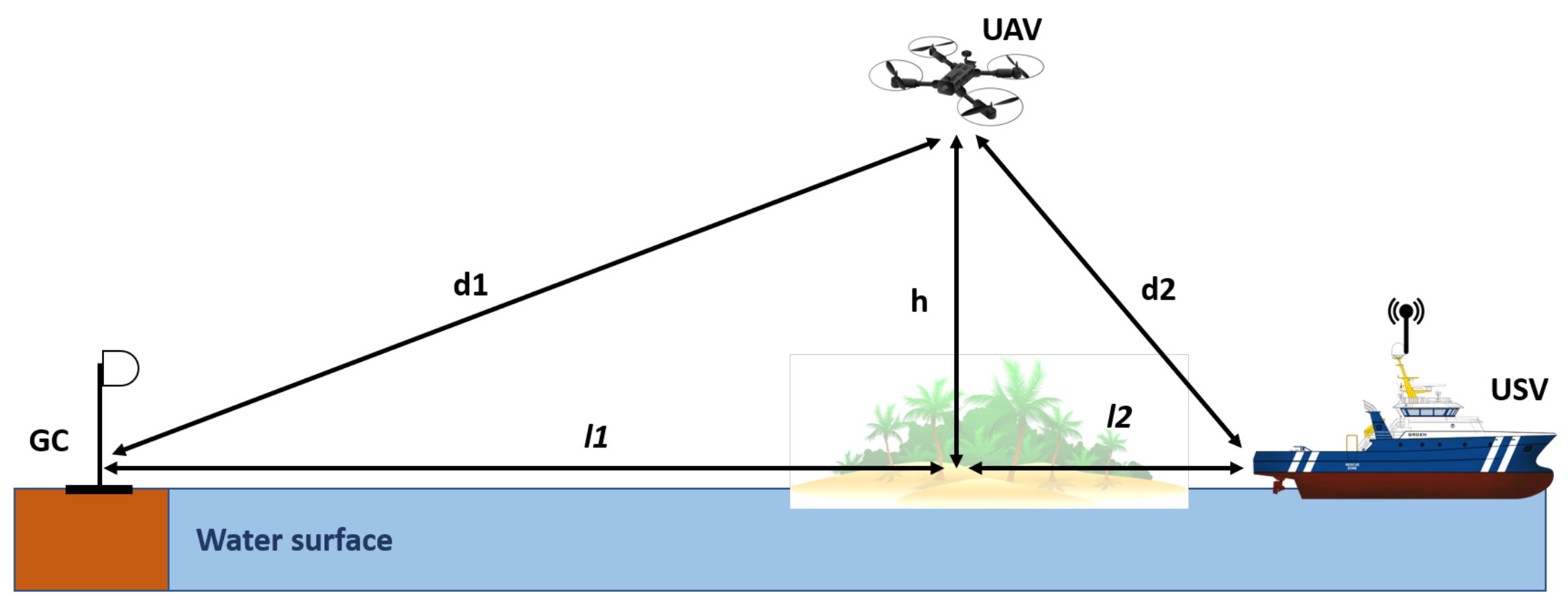
6.2.3. UAV Positioning Analysis
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sullivan, B.P.; Arias Nava, E.; Desai, S.; Sole, J.; Rossi, M.; Ramundo, L.; Terzi, S. Defining Maritime 4.0: Reconciling principles, elements and characteristics to support maritime vessel digitalisation. IET Collab. Intell. Manuf. 2021. [Google Scholar] [CrossRef]
- Sanchez-Gonzalez, P.L.; Díaz-Gutiérrez, D.; Leo, T.J.; Núñez-Rivas, L.R. Toward digitalization of maritime transport? Sensors 2019, 19, 926. [Google Scholar] [CrossRef] [Green Version]
- Zolich, A.; Palma, D.; Kansanen, K.; Fjørtoft, K.; Sousa, J.; Johansson, K.H.; Jiang, Y.; Dong, H.; Johansen, T.A. Survey on communication and networks for autonomous marine systems. J. Intell. Robot. Syst. 2019, 95, 789–813. [Google Scholar] [CrossRef] [Green Version]
- Khosravi, Z.; Gerasimenko, M.; Urama, J.; Pyattaev, A.; Escusol, J.V.; Hosek, J.; Andreev, S.; Koucheryavy, Y. Designing high-speed directional communication capabilities for unmanned surface vehicles. In Proceedings of the 2019 16th International Symposium on Wireless Communication Systems (ISWCS), Oulu, Finland, 27–30 August 2019; pp. 651–655. [Google Scholar]
- Ma, K. Implementation and Evaluation of Communication System for Autonomous Offshore Vehicles. Master’s Thesis, Tampere University, Tampere, Finland, 2020. [Google Scholar]
- Valavanis, K.P.; Vachtsevanos, G.J. Handbook of Unmanned Aerial Vehicles; Springer: Berlin, Germany, 2015; Volume 1. [Google Scholar]
- Salhaoui, M.; Guerrero-González, A.; Arioua, M.; Ortiz, F.J.; El Oualkadi, A.; Torregrosa, C.L. Smart industrial IoT monitoring and control system based on UAV and cloud computing applied to a concrete plant. Sensors 2019, 19, 3316. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Delavarpour, N.; Koparan, C.; Nowatzki, J.; Bajwa, S.; Sun, X. A Technical Study on UAV Characteristics for Precision Agriculture Applications and Associated Practical Challenges. Remote Sens. 2021, 13, 1204. [Google Scholar] [CrossRef]
- Mehallegue, N.; Djellab, M.; Loukhaoukha, K. Efficient Use of UAVs for Public Safety in Disaster and Crisis Management. Wirel. Pers. Commun. 2021, 116, 369–380. [Google Scholar] [CrossRef]
- Global Commercial Drone Market Size in 2018 and 2024. Available online: https://www.statista.com/statistics/878018/global-commercial-drone-market-size/ (accessed on 28 May 2021).
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef] [Green Version]
- Carrillo, D.; Mikhaylov, K.; Nardelli, P.J.; Andreev, S.; da Costa, D.B. Understanding UAV-Based WPCN-Aided Capabilities for Offshore Monitoring Applications. IEEE Wirel. Commun. 2021. [Google Scholar] [CrossRef]
- Alzenad, M.; El-Keyi, A.; Lagum, F.; Yanikomeroglu, H. 3-D placement of an unmanned aerial vehicle base station (UAV-BS) for energy-efficient maximal coverage. IEEE Wirel. Commun. Lett. 2017, 6, 434–437. [Google Scholar] [CrossRef] [Green Version]
- Lai, C.C.; Chen, C.T.; Wang, L.C. On-demand density-aware uav base station 3d placement for arbitrarily distributed users with guaranteed data rates. IEEE Wirel. Commun. Lett. 2019, 8, 913–916. [Google Scholar] [CrossRef] [Green Version]
- Li, M.; Yu, F.R.; Si, P.; Yang, R.; Wang, Z.; Zhang, Y. UAV-Assisted Data Transmission in Blockchain-Enabled M2M Communications with Mobile Edge Computing. IEEE Netw. 2020, 34, 242–249. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef] [Green Version]
- Khawaja, W.; Guvenc, I.; Matolak, D.W.; Fiebig, U.C.; Schneckenburger, N. A survey of air-to-ground propagation channel modeling for unmanned aerial vehicles. IEEE Commun. Surv. Tutor. 2019, 21, 2361–2391. [Google Scholar] [CrossRef] [Green Version]
- Sánchez-García, J.; Reina, D.; Toral, S. A distributed PSO-based exploration algorithm for a UAV network assisting a disaster scenario. Future Gener. Comput. Syst. 2019, 90, 129–148. [Google Scholar] [CrossRef]
- Magán-Carrión, R.; Camacho, J.; García-Teodoro, P.; Flushing, E.F.; Di Caro, G.A. A Dynamical Relay node placement solution for MANETs. Comput. Commun. 2017, 114, 36–50. [Google Scholar] [CrossRef]
- Zhan, C.; Zeng, Y.; Zhang, R. Energy-efficient data collection in UAV enabled wireless sensor network. IEEE Wirel. Commun. Lett. 2017, 7, 328–331. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.; Zeng, Y.; Zhang, R. UAV-enabled wireless power transfer: Trajectory design and energy optimization. IEEE Trans. Wirel. Commun. 2018, 17, 5092–5106. [Google Scholar] [CrossRef] [Green Version]
- E Silva, T.D.; de Melo, C.F.E.; Cumino, P.; Rosário, D.; Cerqueira, E.; De Freitas, E.P. STFANET: SDN-based topology management for flying ad hoc network. IEEE Access 2019, 7, 173499–173514. [Google Scholar] [CrossRef]
- Zhao, Z.; Cumino, P.; Souza, A.; Rosario, D.; Braun, T.; Cerqueira, E.; Gerla, M. Software-defined unmanned aerial vehicles networking for video dissemination services. Ad Hoc Netw. 2019, 83, 68–77. [Google Scholar] [CrossRef]
- How To Calculate Distances, Azimuths and Elevation Angles Of Peaks. Available online: http://tchester.org/sgm/analysis/peaks/how_to_get_view_params.html (accessed on 28 May 2021).
- Parsons, J.D. The Mobile Radio Propagation Channel; Wiley: Hoboken, NJ, USA, 2000. [Google Scholar]
- Cui, Z.; Briso, C.; Guan, K.; Matolak, D.W.; Calvo-Ramírez, C.; Ai, B.; Zhong, Z. Low-altitude UAV air-ground propagation channel measurement and analysis in a suburban environment at 3.9 GHz. IET Microw. Antennas Propag. 2019, 13, 1503–1508. [Google Scholar] [CrossRef]
- Yee Hui, L.; Dong, F.; Meng, Y.S. Near sea-surface mobile radiowave propagation at 5 GHz: Measurements and modeling. Radioengineering 2014, 23, 824–830. [Google Scholar]
- Morón Alguacil, C. Design and Analysis of Directional Antenna Structure for Unmanned Surface Vessel. Master’s Thesis, Tampere University, Tampere, Finland, 2019. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Value |
|---|---|
| Processor | AM335x 1 GHz ARMR Cortex-A8 |
| RAM | 512 MB DDR3 |
| On-board storage | 4 GB eMMC |
| Accelerator support | NEON floating-point and 3D graphics accelerator |
| Micro USB | 1, for Powering and data communication |
| USB | 1, for Hosting |
| GPIO | 2 ∗ 46 pin headers |
| Networking | 1 Ethernet port |
| Operating temperature | 0 to 75 °C |
| Feature | Value |
|---|---|
| CPU | Intel Pentium N3710 up to 2.56 GHz |
| GPU | Intel HD Graphics |
| RAM | 8 GB DDR3L Dual Channe |
| Video interfaces | 1∗ HDMI 1.4 (CEC), 2∗ Mini DisplayPort ++ |
| On-board storage | 32 GB eMMC soldered on-board |
| Networking | 1∗ Gigabit Ethernet LAN interface |
| 1∗ M.2 Key E slot for optional Wireless Module | |
| Audio interfaces | HD Audio Codec ALC283CG |
| Microphone + Headphone Combo Connector (TRRS) | |
| Preamplified stereo speaker output, S/PDIF output | |
| USB | 3∗ USB 3.0 type-A sockets |
| Other interfaces | 2∗ HSUART ports, 2∗ I2C interface, 1∗ SDIO interface |
| 1∗ LPC interface | |
| Platform compability | Arduino™ 101-Compatible through standard Arduino™ |
| Pins layout, compatible with Arduino™ shields |
| Category | Item | Model | Quantity | Supply Voltage [V] |
|---|---|---|---|---|
| Mechanical components | GC Servo motor | HS-805BB | 1 | 4.6–6.0 |
| UAV Servo motor | TGY 306G-HV | 1 | 4.8/6.0/7.2 | |
| USV Servo motor | Dynamixel MX-28 | 2 | 12 | |
| Networking components | Directional antenna | MikroTik DynaDish 5 | 2 | 11–60 |
| Compact Directional antenna | MikroTik SXT 5ac | 1 | 15–60 | |
| Omnidirectional antenna | MikroTik GrooveA 52 | 1 | 9–30 | |
| Router | MikroTik hEX PoE | 1 | 12–57 | |
| Electrical components | USV and GC controller | Beaglebone Green | 2 | 5 |
| UAV controller | Udoo X86 | 1 | 12 | |
| Servo controller | Arbotix-M | 1 | 11–12 | |
| DC motor driver | POLOLU-713 | 1 | 2.7–5.5 | |
| Motion sensor | Adafruit LSM9DS0 | 1 | 2.4–3.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pokorny, J.; Ma, K.; Saafi, S.; Frolka, J.; Villa, J.; Gerasimenko, M.; Koucheryavy, Y.; Hosek, J. Prototype Design and Experimental Evaluation of Autonomous Collaborative Communication System for Emerging Maritime Use Cases. Sensors 2021, 21, 3871. https://doi.org/10.3390/s21113871
Pokorny J, Ma K, Saafi S, Frolka J, Villa J, Gerasimenko M, Koucheryavy Y, Hosek J. Prototype Design and Experimental Evaluation of Autonomous Collaborative Communication System for Emerging Maritime Use Cases. Sensors. 2021; 21(11):3871. https://doi.org/10.3390/s21113871
Chicago/Turabian StylePokorny, Jiri, Khanh Ma, Salwa Saafi, Jakub Frolka, Jose Villa, Mikhail Gerasimenko, Yevgeni Koucheryavy, and Jiri Hosek. 2021. "Prototype Design and Experimental Evaluation of Autonomous Collaborative Communication System for Emerging Maritime Use Cases" Sensors 21, no. 11: 3871. https://doi.org/10.3390/s21113871
APA StylePokorny, J., Ma, K., Saafi, S., Frolka, J., Villa, J., Gerasimenko, M., Koucheryavy, Y., & Hosek, J. (2021). Prototype Design and Experimental Evaluation of Autonomous Collaborative Communication System for Emerging Maritime Use Cases. Sensors, 21(11), 3871. https://doi.org/10.3390/s21113871