
A Test on the Potential of a Low Cost Unmanned Aerial Vehicle RTK/PPK Solution for Precision Positioning

 ,
,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
- 4 DJI self-ventilated 310 rpm and 700 W motors;
- ESC (Electronic Speed Controller) DJI from 40 A to 26 V max (operating frequency of 30 Hz–450 Hz);
- 17 × 6.0 inch closable propellers;
- Flight Control Board DJI N3 model.
- Receiver: LEICA GRX1200PRO;
- Firmware: 7.50;
- Antenna: LEIAT504;
- Radome: SCIT.
- The first featured a Trimble Alloy professional multiband and multi-constellation receiver and a Trimble GNSS Ti-V2 Choke Ring antenna.
- The second configuration envisaged an all-in-one receiver solution of the Emlid Reach RS2 model, again with multi-band and multi-constellation characteristics, but with an integrated antenna.
3. Results
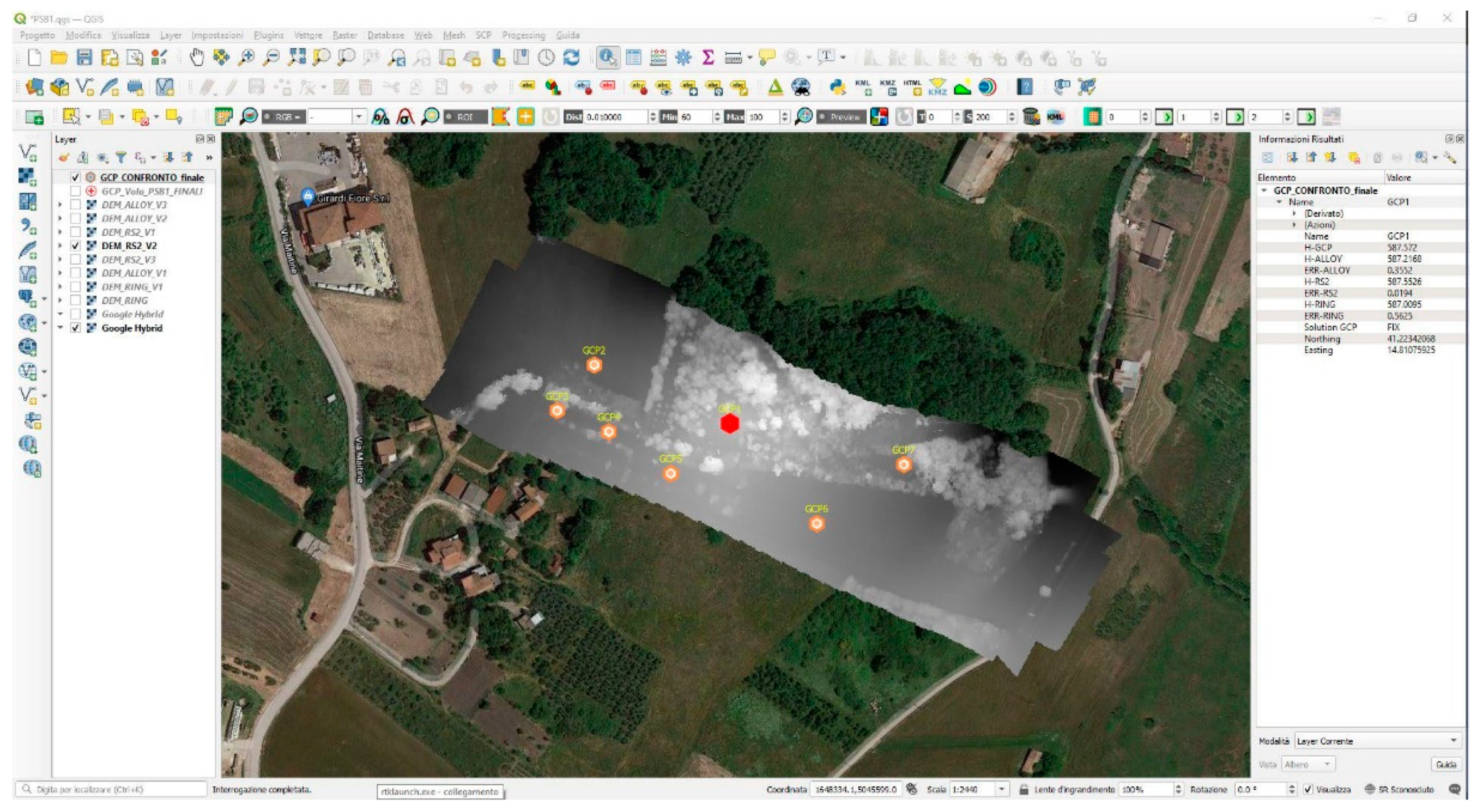
- NAME, label of the measured GCP;
- H GCP, elevation (mt) of the GCP;
- H ALLOY, elevation (mt) deriving from the DEM-ALLOY in the position of the GCP;
- E GCP ALLOY, error deriving from the comparison of the two GCP/ALLOY quotas;
- H RS2, elevation (mt) deriving from DEM-RS2 in the position of the GCP;
- E GCP RS2, error deriving from the comparison of the two GCP/RS2 quotas;
- H RING, elevation (mt) deriving from the DEM-RING in the position of the GCP;
- E GCP RING, error deriving from the comparison of the two GCP/RING quotas;
- S GCP, GNSS solution of the related GCP;
- LAT, latitude of the GCP;
- LON, longitude of the GCP.
4. Discussion
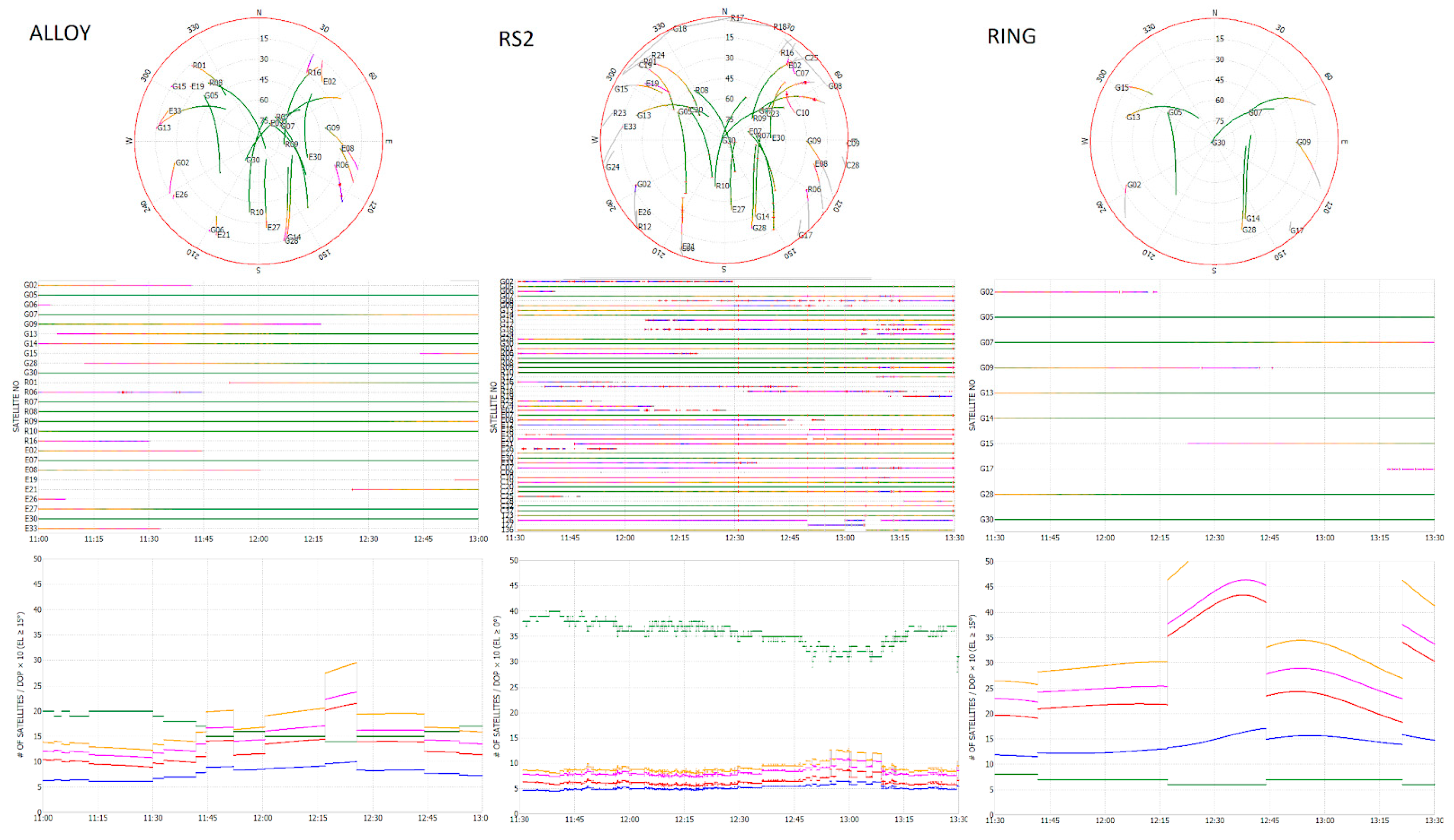
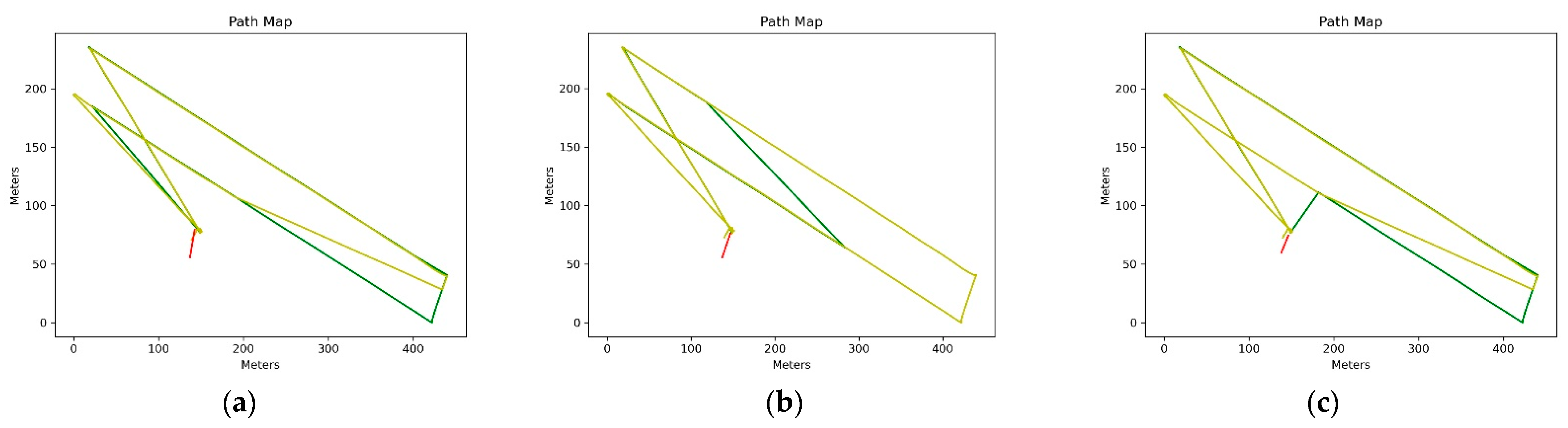
- A top-of-the-range receiver for professional use, called ALLOY, Trimble Alloy model, Multi-frequency and Multi-constellation, connected to a professional and high-performance antenna of the Trimble GNSS Ti-V2 Choke Ring model;
- A low cost All-in-One receiver for professional use, called RS2, model Emlid Reach RS2, Multi-frequency and Multi-constellation, with an internal antenna;
- A receiver of the Italian National GNSS Network of the National Institute of Geophysics and Volcanology, called RING, model Leica GRX1200PRO Dual-frequency (L1-L2) and single-constellation (GPS), connected to a professional and high-performance antenna of the model Leica LEIAT504.
- The height differences between the GCPs and the DEM ALLOY oscillate between the minimum of about 1 cm (for the GCP number 3) and the maximum of about 35 cm (for the GCP number 1);
- The height differences between the GCPs and the DEM RS2 oscillate between the minimum of about 2 cm (for GCP number 1) and the maximum of about 30 cm (for GCP number 7);
- The height differences between the GCPs and the DEM RING oscillate between the minimum of about 5 cm (for the GCP number 3) and the maximum of about 56 cm (for the GCP number 1).
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hong, J.-H.; Tsai, C.-Y. Using 3D Webgis to support the disaster simulation, management and analysis-examples of tsunami and flood. In Proceedings of the 13th GeoInformation for Disaster Management Conference, Sydney, Australia, 30 November–4 December 2020; pp. 43–50. [Google Scholar]
- Qin, R.; Tian, J.; Reinartz, P. 3D change detection-Approaches and applications. ISPRS J. Photogramm. Remote Sens. 2016, 122, 41–56. [Google Scholar] [CrossRef] [Green Version]
- Ajmar, A.; Boccardo, P.; Disabato, F.; Tonolo, F.G. Rapid Mapping: Geomatics role and research opportunities. Rend. Lincei 2015, 26, 63–73. [Google Scholar] [CrossRef] [Green Version]
- Tampubolon, W.; Reinhardt, W. UAV data processing for rapid mapping activities. In Proceedings of the ISPRS Geospatial Week 2015, La Grande Motte, France, 28 September–3 October 2015; pp. 371–377. [Google Scholar]
- Civico, R.; Pucci, S.; Villani, F.; Pizzimenti, L.; De Martini, P.M.; Nappi, R.; the Open EMERGEO Working Group. Surface ruptures following the 30 October 2016 Mw 6.5 Norcia earthquake, central Italy. J. Maps 2018, 14, 151–160. [Google Scholar] [CrossRef] [Green Version]
- Livio, F.A.; Michetti, A.M.; Vittori, E.; Gregory, L.; Wedmore, L.; Piccardi, L.; Tondi, E.; Roberts, G.P.; Blumetti, A.M.; Bonadeo, L.; et al. Surface faulting during the August 24, 2016, Central Italy earthquake (Mw 6.0): Preliminary results. Ann. Geophys. 2016, 59. [Google Scholar] [CrossRef]
- Gori, S.; Falcucci, E.; Galadini, F.; Zimmaro, P.; Pizzi, A.; Kayen, R.E.; Lingwall, B.N.; Moro, M.; Saroli, M.; Fubelli, G.; et al. Surface Faulting Caused by the 2016 Central Italy Seismic Sequence: Field Mapping and LiDAR/UAV Imaging. Earthq. Spectra 2018, 34, 1585–1610. [Google Scholar] [CrossRef]
- Cheloni, D.; De Novellis, V.; Albano, M.; Antonioli, A.; Anzidei, M.; Atzori, S.; Avallone, A.; Bignami, C.; Bonano, M.; Calcaterra, S.; et al. Geodetic model of the 2016 Central Italy earthquake sequence inferred from InSAR and GPS data. Geophys. Res. Lett. 2017, 44, 6778–6787. [Google Scholar] [CrossRef]
- Zhong, C.; Liu, Y.; Gao, P.; Chen, W.; Li, H.; Hou, Y.; Nuremanguli, T.; Ma, H. Landslide mapping with remote sensing: Challenges and opportunities. Int. J. Remote Sens. 2019, 41, 1–27. [Google Scholar] [CrossRef]
- Kereszturi, G.; Schaefer, L.N.; Schleiffarth, W.K.; Procter, J.; Pullanagari, R.R.; Mead, S.; Kennedy, B. Integrating airborne hyperspectral imagery and LiDAR for volcano mapping and monitoring through image classification. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 323–339. [Google Scholar] [CrossRef]
- Carn, S.A. Application of synthetic aperture radar (SAR) imagery to volcano mapping in the humid tropics: A case study in East Java, Indonesia. Bull. Volcanol. 1999, 61, 92–105. [Google Scholar] [CrossRef]
- Nebiker, S.; Eugster, H. UAV-based augmented monitoring-real time georeferencing and integration of video imagery with virtual globes. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 1229–1235. [Google Scholar]
- Remondino, F.; Barazzetti, L.; Nex, F.; Scaioni, M.; Sarazzi, D. UAV photogrammetry for mapping and 3D modeling-current status and future perspectives. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Zurich, Switzerland, 14–16 September 2011. [Google Scholar]
- Kerle, N.; Nex, F.; Gerke, M.; Duarte, D.; Vetrivel, A. UAV-Based Structural Damage Mapping: A Review. ISPRS Int. J. Geo-Inf. 2020, 9, 14. [Google Scholar] [CrossRef] [Green Version]
- Rosnell, T.; Honkavaara, E. Point Cloud Generation from Aerial Image Data Acquired by a Quadrocopter Type Micro Unmanned Aerial Vehicle and a Digital Still Camera. Sensors 2012, 12, 453–480. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gabrlik, P. The Use of Direct Georeferencing in Aerial Photogrammetry with Micro UAV. IFAC-PapersOnLine 2015, 48, 380–385. [Google Scholar] [CrossRef]
- Tarolli, P. High-resolution topography for understanding Earth surface processes: Opportunities and challenges. Geomorphology 2014, 216, 295–312. [Google Scholar] [CrossRef]
- Stempfhuber, W.; Buchholz, M. A precise, low-cost rtk gnss system for uav applications. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Zurich, Switzerland, 14–16 September 2011. [Google Scholar]
- Turner, D.; Lucieer, A.; Watson, C. An Automated Technique for Generating Georectified Mosaics from Ultra-High Resolution Unmanned Aerial Vehicle (UAV) Imagery, Based on Structure from Motion (SfM) Point Clouds. Remote Sens. 2012, 4, 1392–1410. [Google Scholar] [CrossRef] [Green Version]
- Isejima, J.; Takasu, T.; Ebinuma, T.; Yasuda, A. Performance Evaluation of the RTK-GPS Positioning with Communication Delay. J. Jpn. Inst. Navig. 2008, 119, 205–211. [Google Scholar] [CrossRef] [Green Version]
- Eisenbeiß, H. UAV Photogrammetry. Ph.D. Thesis, University of Technology Dresden, Dresden, Germany, 2009. [Google Scholar]
- D’Oleire-Oltmanns, S.; Marzolff, I.; Peter, K.D.; Ries, J.B. Unmanned Aerial Vehicle (UAV) for Monitoring Soil Erosion in Morocco. Remote Sens. 2012, 4, 3390–3416. [Google Scholar] [CrossRef] [Green Version]
- Passalacqua, P.; Belmont, P.; Staley, D.M.; Simley, J.D.; Arrowsmith, J.R.; Bode, C.A.; Crosby, C.; DeLong, S.B.; Glenn, N.F.; Kelly, S.A.; et al. Analyzing high resolution topography for advancing the understanding of mass and energy transfer through landscapes: A review. Earth-Sci. Rev. 2015, 148, 174–193. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Aldana-Jague, E.; Clapuyt, F.; Wilken, F.; Vanacker, V.; Van Oost, K. Evaluating the Potential of PPK Direct Georeferencing for UAV-SfM Photogrammetry and Precise Topographic Mapping. Earth Surf. Dynam. Discuss. 2019, 1–34. [Google Scholar] [CrossRef]
- Nagai, M.; Chen, T.; Shibasaki, R.; Kumagai, H.; Ahmed, A. UAV-Borne 3-D Mapping System by Multisensor Integration. IEEE Trans. Geosci. Remote Sens. 2009, 47, 701–708. [Google Scholar] [CrossRef]
- Dinkov, D.; Kitev, A. Advantages, Disadvantages and Applicability of Gnss Post-Processing Kinematic (Ppk) Method for Direct Georeferencing of Uav Images. In Proceedings of the 8th International Conference on Cartography and GIS, Nessebar, Bulgaria, 15–20 June 2020; Volume 1, pp. 747–759. [Google Scholar]
- Valente, D.S.M.; Momin, A.; Grift, T.; Hansen, A. Accuracy and precision evaluation of two low-cost RTK global navigation satellite systems. Comput. Electron. Agric. 2020, 168, 105142. [Google Scholar] [CrossRef]
- Takasu, T.; Yasuda, A. Evaluation of RTK-GPS Performance with Low-cost Single-frequency GPS Receivers. In Proceedings of the International Symposium on GPS/GNSS, Tokyo, Japan, 11–14 November 2008; pp. 852–861. [Google Scholar]
- Avallone, A.; Selvaggi, G.; D’Anastasio, E.; D’Agostino, N.; Pietrantonio, G.; Riguzzi, F.; Serpelloni, E.; Anzidei, M.; Casula, G.; Cecere, G.; et al. The RING network: Improvement of a GPS velocity field in the central Mediterranean.INGV, Istituto Nazionale di Geofisica e Vulcanologia. Ann. Geophys. 2010, 53, 39–54. [Google Scholar]
- Takasu, T.; Kubo, N.; Yasuda, A. Development, evaluation and application of RTKLIB: A program library for RTK-GPS. GPS/GNSS Symp. 2007, 213–218. [Google Scholar]
- Roegner, G.C.; Coleman, A.M.; Borde, A.B.; Tagestad, J.D.; Erdt, R.; Aga, J.; Zimmerman, S.A.; Cole, C. Quantifying Restoration of Juvenile Salmon Habitat with Hyperspectral Imaging from an Unmanned Aircraft System of Report. September 2019. Available online: https://www.researchgate.net/publication/336042198 (accessed on 3 June 2021).
- Tomaštík, J.; Mokroš, M.; Saloň, Š.; Chudý, F.; Tunák, D. Accuracy of Photogrammetric UAV-Based Point Clouds under Conditions of Partially-Open Forest Canopy. Forests 2017, 8, 151. [Google Scholar] [CrossRef] [Green Version]
- Taddia, Y.; González-García, L.; Zambello, E.; Pellegrinelli, A. Quality Assessment of Photogrammetric Models forFaçade and Building Reconstruction Using DJI Phantom 4 RTK. Remote Sens. 2020, 12, 3144. [Google Scholar] [CrossRef]
- Tomaštík, J.; Mokroš, M.; Surový, P.; Grznárová, A.; Merganič, J. UAV RTK/PPK Method—An Optimal Solution for Mapping Inaccessible Forested Areas? Remote Sens. 2019, 19, 721. [Google Scholar] [CrossRef] [Green Version]
- Turner, D.; Lucieer, A.; Wallace, L. Direct georeferencing of ultrahigh-resolution UAV imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2738–2745. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | ALLOY | RS2 | RING | |||
|---|---|---|---|---|---|---|
| Total | Percentage | Total | Percentage | Total | Percentage | |
| Fix | 880 | 37.2% | 574 | 24.2% | 911 | 38.5% |
| Float | 1485 | 62.7% | 1792 | 75.7% | 1454 | 61.4% |
| Single | 2 | 0.1% | 2 | 0.1% | 2 | 0.1% |
| Sbas | 0 | 0.0% | 0 | 0.0% | 0 | 0.0% |
| Dgps | 0 | 0.0% | 0 | 0.0% | 0 | 0.0% |
| Type | ALLOY | RS2 | RING | |||
|---|---|---|---|---|---|---|
| Total | Percentage | Total | Percentage | Total | Percentage | |
| Fix | 19 | 36.5% | 7 | 13.5% | 23 | 44.2% |
| Float | 33 | 63.5% | 45 | 86.5% | 29 | 55.8% |
| Single | 0 | 0.0% | 0 | 0.0% | 0 | 0.0% |
| Sbas | 0 | 0.0% | 0 | 0.0% | 0 | 0.0% |
| Dgps | 0 | 0.0% | 0 | 0.0% | 0 | 0.0% |
| NAME | H GCP (mt) | H ALLOY (mt) | E GCP ALLOY (mt) | H RS2 (mt) | E GCP RS2 (mt) | H RING (mt) | E GCP RING (mt) | S GCP | LAT | LON |
|---|---|---|---|---|---|---|---|---|---|---|
| GCP1 | 587.5720 | 587.2168 | 0.3552 | 587.5526 | 0.0194 | 587.0095 | 0.5625 | Fix | 41.22342068 | 14.81075925 |
| GCP2 | 576.2580 | 576.1435 | 0.1145 | 576.4395 | −0.1814 | 576.1469 | 0.1111 | Fix | 41.22375641 | 14.80972046 |
| GCP3 | 577.4390 | 577.4275 | 0.1150 | 577.6741 | −0.2351 | 577.5280 | −0.0890 | Float | 41.22349218 | 14.80943705 |
| GCP4 | 579.8300 | 579.6104 | 0.2196 | 579.8850 | −0.0550 | 579.7789 | 0.0511 | Fix | 41.23337290 | 14.80983308 |
| GCP5 | 583.7360 | 583.4110 | 0.3250 | 583.8861 | −0.1501 | 583.6151 | 0.1209 | Fix | 41.22331391 | 14.81030760 |
| GCP6 | 581.2110 | 581.2643 | −0.0533 | 581.3800 | −0.1690 | 581.0762 | 0.1348 | Fix | 41.22284603 | 14.81142498 |
| GCP7 | 578.2830 | 578.3019 | −0.0189 | 578.5892 | −0.3062 | 578.0187 | 0.2643 | Fix | 41.22318432 | 14.81209091 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Famiglietti, N.A.; Cecere, G.; Grasso, C.; Memmolo, A.; Vicari, A. A Test on the Potential of a Low Cost Unmanned Aerial Vehicle RTK/PPK Solution for Precision Positioning. Sensors 2021, 21, 3882. https://doi.org/10.3390/s21113882
Famiglietti NA, Cecere G, Grasso C, Memmolo A, Vicari A. A Test on the Potential of a Low Cost Unmanned Aerial Vehicle RTK/PPK Solution for Precision Positioning. Sensors. 2021; 21(11):3882. https://doi.org/10.3390/s21113882
Chicago/Turabian StyleFamiglietti, Nicola Angelo, Gianpaolo Cecere, Carmine Grasso, Antonino Memmolo, and Annamaria Vicari. 2021. "A Test on the Potential of a Low Cost Unmanned Aerial Vehicle RTK/PPK Solution for Precision Positioning" Sensors 21, no. 11: 3882. https://doi.org/10.3390/s21113882
APA StyleFamiglietti, N. A., Cecere, G., Grasso, C., Memmolo, A., & Vicari, A. (2021). A Test on the Potential of a Low Cost Unmanned Aerial Vehicle RTK/PPK Solution for Precision Positioning. Sensors, 21(11), 3882. https://doi.org/10.3390/s21113882