
Characterizing the Impact of Doppler Effects on Body-Centric LoRa Links with SDR




Abstract
:1. Introduction
2. SDR-Based LoRa Modulation
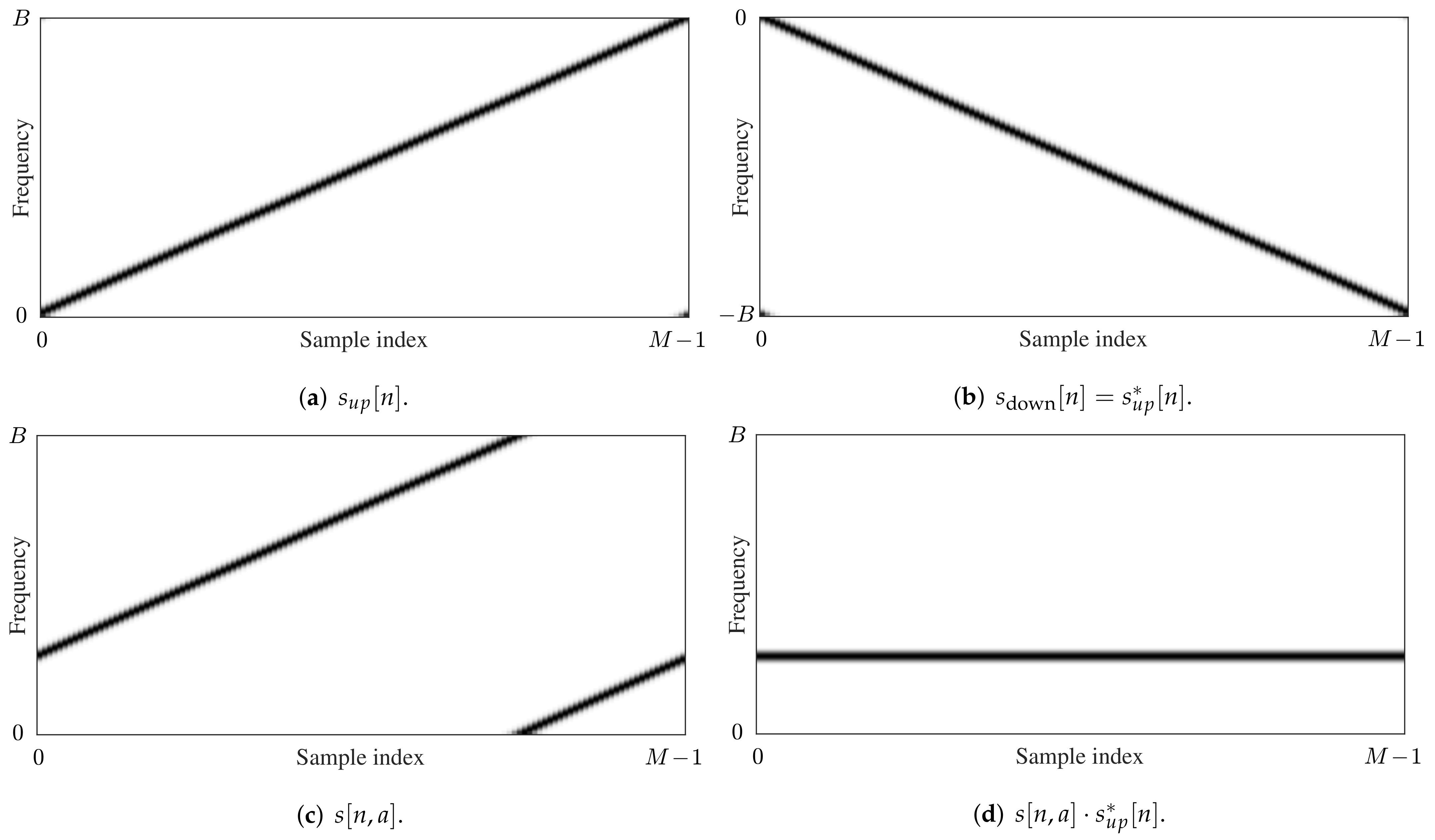
2.1. LoRa Modulation Basics
2.2. Software Implementation
3. Doppler Effects Simulation and Analysis
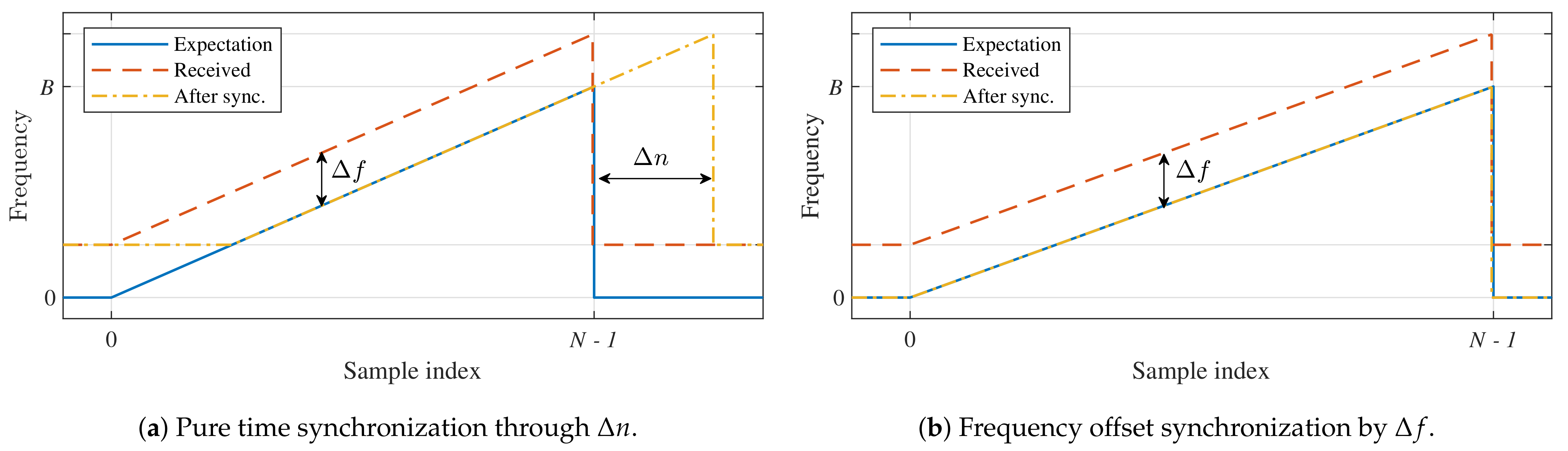
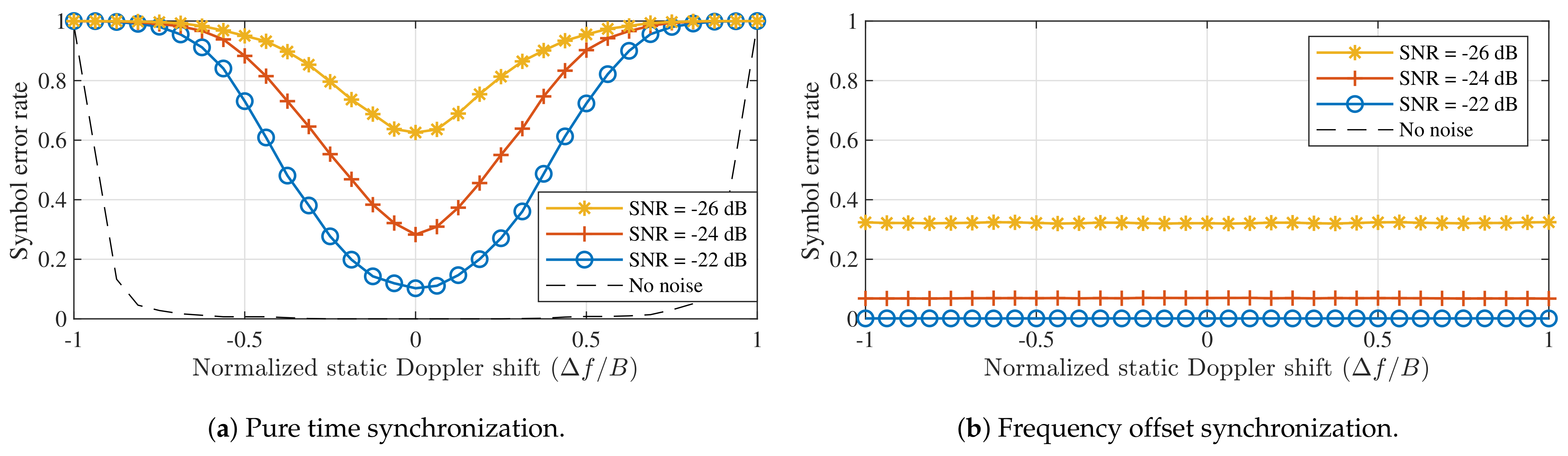
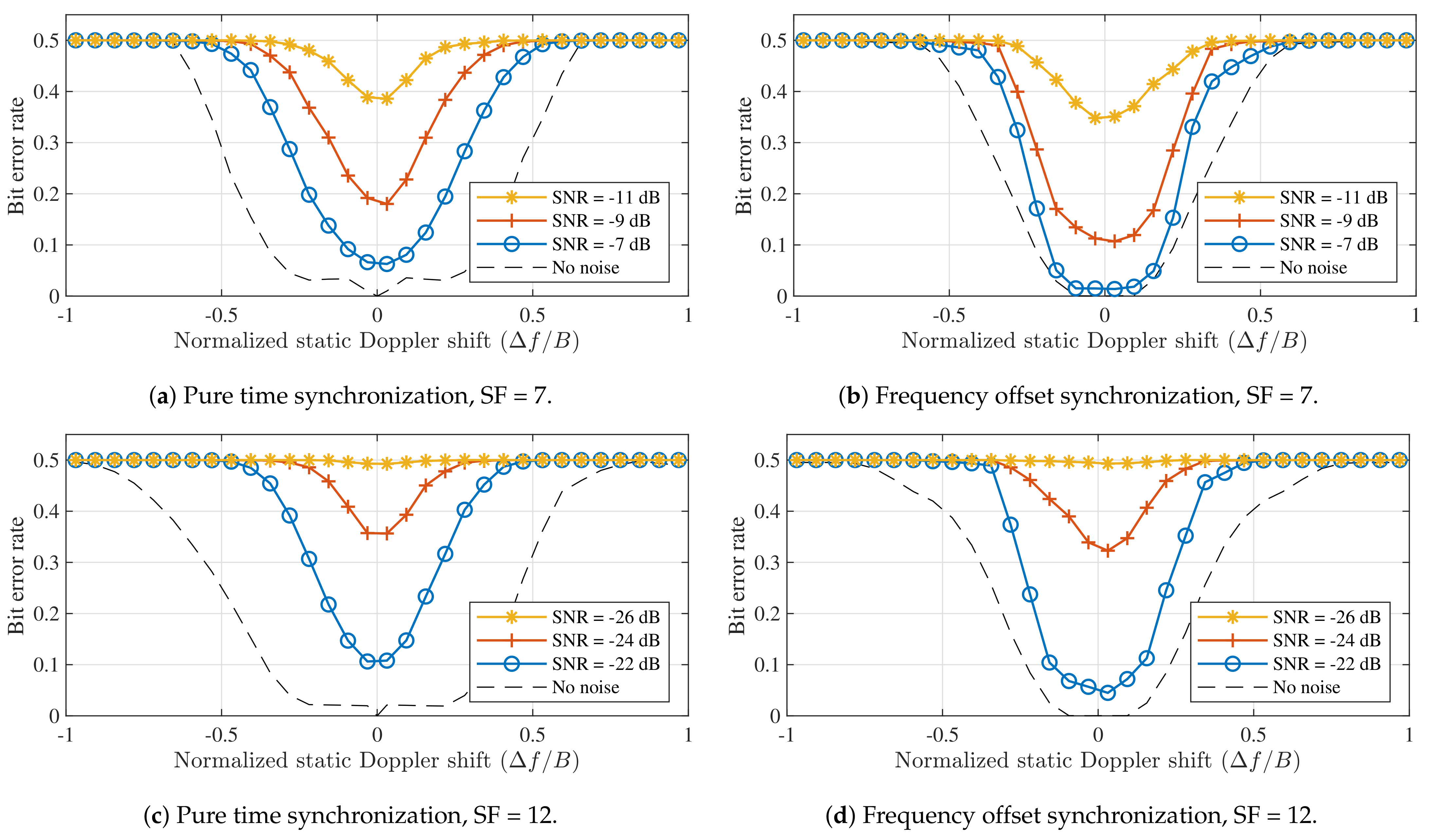
3.1. Static Doppler Shift
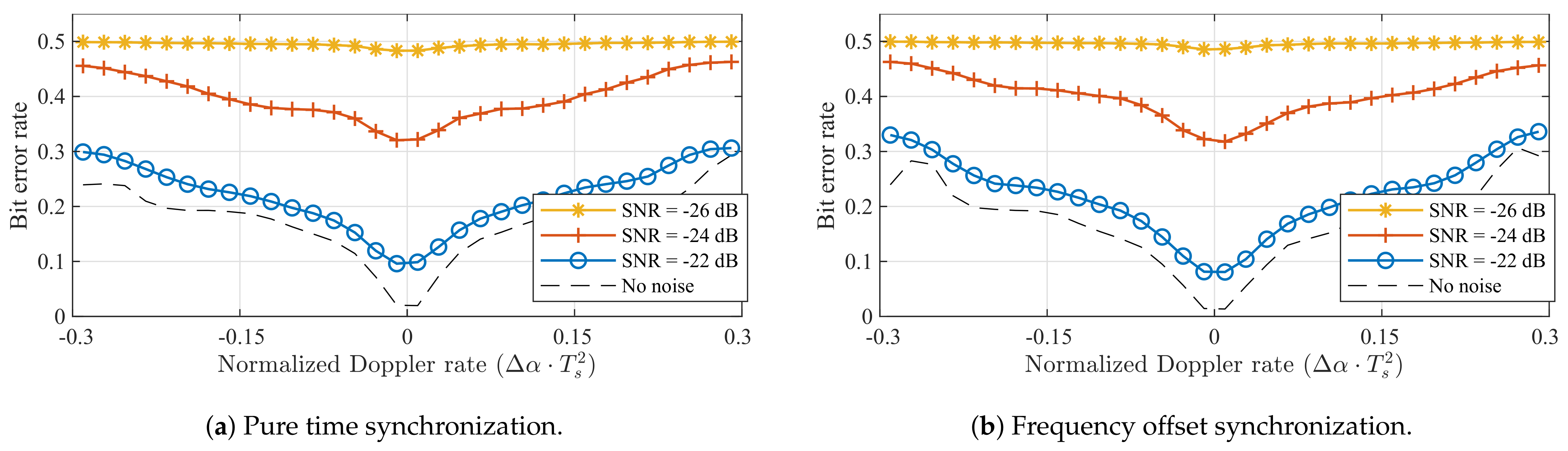
3.2. Dynamic Doppler Shift
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| LPWAN | Low-power wide-area network |
| IoT | Internet of Things |
| SNR | Signal-to-noise ratio |
| ISM | Industrial, scientific and medical |
| SDR | Software-defined radio |
| CSS | Chirp spread spectrum |
| SF | Spreading factor |
| BW | Bandwidth |
| CR | Code rate |
| SFD | Start-of-frame delimiter |
| LoRaWAN | LoRa wide-area network |
| DFT | Discrete Fourier transform |
| AWGN | Additive white Gaussian Noise |
| SER | Symbol error rate |
| BER | Bit error rate |
References
- Sigfox. Available online: https://www.sigfox.com/en (accessed on 5 May 2021).
- GSM Association. NarrowBand—Internet of Things (NB-IoT). Available online: https://www.gsma.com/iot/narrow-band-internet-of-things-nb-iot/ (accessed on 5 May 2021).
- LoRa Alliance. Available online: https://www.lora-alliance.org/ (accessed on 5 May 2021).
- Petäjäjärvi, J.; Mikhaylov, K.; Hämäläinen, M.; Iinatti, J. Evaluation of LoRa LPWAN Technology for Remote Health and Wellbeing Monitoring. In Proceedings of the 2016 10th International Symposium on Medical Information and Communication Technology (ISMICT), Worcester, MA, USA, 20–23 March 2016. [Google Scholar] [CrossRef]
- Petäjäjärvi, J.; Mikhaylov, K.; Yasmin, R.; Hämäläinen, M.; Iinatti, J. Evaluation of LoRa LPWAN Technology for Indoor Remote Health and Wellbeing Monitoring. Int. J. Wirel. Inf. Netw. 2017, 24, 153–165. [Google Scholar] [CrossRef] [Green Version]
- Catherwood, P.A.; McComb, S.; Little, M.; McLaughlin, J.A.D. Channel Characterisation for Wearable LoRaWAN Monitors. In Proceedings of the Loughborough Antennas Propagation Conference (LAPC 2017), Loughborough, UK, 13–14 November 2017; pp. 1–4. [Google Scholar] [CrossRef] [Green Version]
- Ameloot, T.; van Torre, P.; Rogier, H. A Compact Low-Power LoRa IoT Sensor Node with Extended Dynamic Range for Channel Measurements. Sensors 2018, 18, 2137. [Google Scholar] [CrossRef] [Green Version]
- Ameloot, T.; van Torre, P.; Rogier, H. Experimental Parameter Optimization for Adaptive LoRa Modulation in Body-Centric Applications. In Proceedings of the 2020 14th European Conference on Antennas and Propagation (EuCAP), Copenhagen, Denmark, 15–20 March 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Vangelista, L. Frequency Shift Chirp Modulation: The LoRa Modulation. IEEE Signal Process. Lett. 2017, 24, 1818–1821. [Google Scholar] [CrossRef]
- Dias, C.F.; de Lima, E.R.; Fraidenraich, G. Bit Error Rate Closed-Form Expressions for LoRa Systems under Nakagami and Rice Fading Channels. Sensors 2019, 19, 4412. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Elshabrawy, T.; Robert, J. Closed-Form Approximation of LoRa Modulation BER Performance. IEEE Commun. Lett. 2018, 22, 1778–1781. [Google Scholar] [CrossRef]
- Chiani, M.; Elzanaty, A. On the LoRa Modulation for IoT: Waveform Properties and Spectral Analysis. IEEE Internet Things J. 2019, 6, 8463–8470. [Google Scholar] [CrossRef] [Green Version]
- Robyns, P.; Quax, P.; Lamotte, W.; Thenaers, W. A Multi-Channel Software Decoder for the LoRa Modulation Scheme. In Proceedings of the 3rd International Conference on Internet of Things, Big Data and Security—Volume 1: IoTBDS, Funchal, Portugal, 19–21 March 2018; pp. 41–51. [Google Scholar] [CrossRef]
- Edward, P.; Muhammad, A.; Elzeiny, S.; Ashour, M.; Elshabrawy, T.; Robert, J. Enhancing the Capture Capabilities of LoRa Receivers. In Proceedings of the 2019 International Conference on Smart Applications, Communications and Networking (SmartNets), Sharm El Sheik, Egypt, 17–19 December 2019; pp. 1–6. [Google Scholar]
- Elshabrawy, T.; Edward, P.; Ashour, M.; Robert, J. On the Different Mathematical Realizations for the Digital Synthesis of LoRa-Based Modulation. In Proceedings of the European Wireless 2019; 25th European Wireless Conference, Aarhus, Denmark, 2–4 May 2019; pp. 1–6. [Google Scholar]
- Sikken, B. Decoding LoRa. Available online: https://revspace.nl/DecodingLora (accessed on 5 May 2021).
- Blum, J. LoRa SDR Project. Available online: https://github.com/myriadrf/LoRa-SDR (accessed on 5 May 2021).
- RTL-SDRangelove. Github Project Page. Available online: https://github.com/hexameron/rtl-sdrangelove (accessed on 5 May 2021).
- Noreen, U.; Bounceur, A.; Clavier, L. A Study of LoRa Low Power and Wide Area Network Technology. In Proceedings of the 2017 International Conference on Advanced Technologies for Signal and Image Processing (ATSIP), Fez, Morocco, 22–24 May 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Liando, J.C.; Gamage, A.; Tengourtius, A.W.; Li, M. Known and Unknown Facts of LoRa: Experiences from a Large-scale Measurement Study. Acm Trans. Sen. Netw. 2019, 15, 16:1–16:35. [Google Scholar] [CrossRef]
- Petäjäjärvi, J.; Mikhaylov, K.; Pettissalo, M.; Janhunen, J.; Iinatti, J. Performance of a Low-Power Wide-Area Network Based on LoRa Technology: Doppler Robustness, Scalability, and Coverage. Int. J. Distrib. Sens. Netw. 2017, 13. [Google Scholar] [CrossRef] [Green Version]
- Patel, D.; Won, M. Experimental Study on Low Power Wide Area Networks (LPWAN) for Mobile Internet of Things. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Ameloot, T.; van Torre, P.; Rogier, H. LoRa Base-Station-to-Body Communication With SIMO Front-to-Back Diversity. IEEE Trans. Antennas Propag. 2021, 69, 397–405. [Google Scholar] [CrossRef]
- Doroshkin, A.A.; Zadorozhny, A.M.; Kus, O.N.; Prokopyev, V.Y.; Prokopyev, Y.M. Experimental Study of LoRa Modulation Immunity to Doppler Effect in CubeSat Radio Communications. IEEE Access 2019, 7, 75721–75731. [Google Scholar] [CrossRef]
- Ameloot, T.; Rogier, H.; Moeneclaey, M.; van Torre, P. LoRa Signal Synchronization and Detection at Extremely Low Signal-to-Noise Ratios. Submitt. IEEE Internet Things J. 2021. [Google Scholar]
- Springer, A.; Gugler, W.; Huemer, M.; Reindl, L.; Ruppel, C.C.W.; Weigel, R. Spread Spectrum Communications using Chirp Signals. In Proceedings of the IEEE/AFCEA EUROCOMM 2000. Information Systems for Enhanced Public Safety and Security (Cat. No.00EX405), Munich, Germany, 19 May 2000; pp. 166–170. [Google Scholar] [CrossRef]
- Semtech Corporation. 137 MHz to 1020 MHz Low Power Long Range Transceiver; Semtech Corporation: Camarillo, CA, USA, 2016; Rev. 5. [Google Scholar]
- Augustin, A.; Yi, J.; Clausen, T.; Townsley, W.M. A Study of LoRa: Long Range & Low Power Networks for the Internet of Things. Sensors 2016, 16, 1466. [Google Scholar] [CrossRef]
- Fernandez, L.; de Azua Ortega, J.R.; Calveras, A.; Camps, A. Assessing LoRa for Satellite-to-Earth Communications Considering the Impact of Ionospheric Scintillation. IEEE Access 2020, 8, 165570–165582. [Google Scholar] [CrossRef]
- Van Torre, P.; Ameloot, T.; Rogier, H. Long-range body-to-body LoRa link at 868 MHz. In Proceedings of the 2019 13th European Conference on Antennas and Propagation (EuCAP), Krakow, Poland, 31 March–5 April 2019; pp. 1–5. [Google Scholar]
- Vallozzi, L.; Vandendriessche, W.; Rogier, H.; Hertleer, C.; Scarpello, M.L. Wearable Textile GPS Antenna for Integration in Protective Garments. In Proceedings of the Fourth European Conference on Antennas and Propagation, Barcelona, Spain, 12–16 April 2010; p. 4. [Google Scholar]
- Zhang, Y.; Yu, X.M.; Kong, L.Y.; Zhang, L.P.; Qin, H.L. Anti-Multipath Dual-Band GNSS Antenna Design with Peano Fractal EBG Structure. In Proceedings of the 2016 Asia-Pacific International Symposium on Electromagnetic Compatibility (APEMC), Shenzhen, China, 17–21 May 2016; Volume 1, pp. 523–525. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SF | for * (Hz) | (m/s) | (km/h) |
|---|---|---|---|
| 7 | 488.28 | 168.64 | 607.12 |
| 8 | 244.14 | 84.32 | 303.56 |
| 9 | 122.07 | 42.16 | 151.78 |
| 10 | 61.04 | 21.08 | 75.90 |
| 11 | 30.52 | 10.54 | 37.95 |
| 12 | 15.26 | 5.27 | 18.97 |
| Data Payload = 16 Symbols | ||
| SF | (Hz/s) | (m/s2) |
| 7 | 9125 | 3152 |
| 8 | 2735 | 944.6 |
| 9 | 586.3 | 202.5 |
| 10 | 175.8 | 60.72 |
| 11 | 39.13 | 13.51 |
| 12 | 9.50 | 3.28 |
| Data Payload = 32 Symbols | ||
| SF | (Hz/s) | (m/s2) |
| 7 | 5625 | 1943 |
| 8 | 1563 | 539.8 |
| 9 | 391.3 | 135.1 |
| 10 | 97.63 | 33.72 |
| 11 | 23.05 | 7.96 |
| 12 | 5.75 | 1.98 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ameloot, T.; Moeneclaey, M.; Van Torre, P.; Rogier, H. Characterizing the Impact of Doppler Effects on Body-Centric LoRa Links with SDR. Sensors 2021, 21, 4049. https://doi.org/10.3390/s21124049
Ameloot T, Moeneclaey M, Van Torre P, Rogier H. Characterizing the Impact of Doppler Effects on Body-Centric LoRa Links with SDR. Sensors. 2021; 21(12):4049. https://doi.org/10.3390/s21124049
Chicago/Turabian StyleAmeloot, Thomas, Marc Moeneclaey, Patrick Van Torre, and Hendrik Rogier. 2021. "Characterizing the Impact of Doppler Effects on Body-Centric LoRa Links with SDR" Sensors 21, no. 12: 4049. https://doi.org/10.3390/s21124049