
A Novel Crowdsourcing Model for Micro-Mobility Ride-Sharing Systems


 ,
,  ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Literature Review
3. Novel Crowdsourcing Model
- suppliers (i.e., people offering their private e-scooters/e-bikes (Throughout this paper, we occasionally use only the term “e-scooter(s)” to refer to all other micro-mobility vehicles because e-scooters are the main vehicles used in the tested dataset in this study.) for hire);
- customers (i.e., people creating the hiring demand); and
- a management party (i.e., responsible for receiving hiring booking demands and matching them with the offered resources).
3.1. Proposed Agent-Based Modelling
- e-scooter agent,
- central agent, and
- demand generator agent.
- The first rule chooses an e-scooter agent randomly from a subset of e-scooter agents submitted to the EOI.
- The second rule chooses the e-scooter agent that submitted the EOI and has the largest remaining charge in its battery.
- The third rule randomly chooses an e-scooter agent from a subset of e-scooter agents, which submitted the EOI, whose destination of the demand (i.e., trip) is the home location of the e-scooter agent.
- The fourth rule chooses the e-scooter agent, which submitted the EOI, whose destination of the demand (i.e., trip) is the home location of the e-scooter agent and has the largest remaining charge in its battery.
- The fifth rule drops the demand if there is no EOI.
3.2. Data Analysis and Statistical Methodology
3.2.1. Austin Dataset
3.2.2. Chicago Dataset
4. Experimental Results
4.1. Austin Dataset
4.2. Chicago Dataset
5. Discussion and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tuncer, S.; Brown, B. E-scooters on the Ground: Lessons for Redesigning Urban Micro-Mobility. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; pp. 1–14. [Google Scholar]
- Eccarius, T.; Lu, C.-C. Adoption intentions for micro-mobility—Insights from electric scooter sharing in Taiwan. Transp. Res. Part D Transp. Environ. 2020, 84, 102327. [Google Scholar] [CrossRef]
- Tuncer, S.; Laurier, E.; Brown, B.; Licoppe, C. Notes on the practices and appearances of e-scooter users in public space. J. Transp. Geogr. 2020, 85, 102702. [Google Scholar] [CrossRef]
- Jiang, Z.; Lei, C.; Ouyang, Y. Optimal investment and management of shared bikes in a competitive market. Transp. Res. Part B Methodol. 2020, 135, 143–155. [Google Scholar] [CrossRef]
- Nieuwenhuijsen, M.J.; Khreis, H. Car free cities: Pathway to healthy urban living. Environ. Int. 2016, 94, 251–262. [Google Scholar] [CrossRef]
- Nieuwenhuijsen, M.J. Urban and transport planning, environmental exposures and health-new concepts, methods and tools to improve health in cities. Environ. Health 2016, 15 (Suppl. S1), 38. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- McKenzie, G. Spatiotemporal comparative analysis of scooter-share and bike-share usage patterns in Washington, D.C. J. Transp. Geogr. 2019, 78, 19–28. [Google Scholar] [CrossRef]
- Shen, Y.; Zhang, H.; Zhao, J. Integrating shared autonomous vehicle in public transportation system: A supply-side simulation of the first-mile service in Singapore. Transp. Res. Part A Policy Pract. 2018, 113, 125–136. [Google Scholar] [CrossRef]
- Wen, J.; Chen, Y.X.; Nassir, N.; Zhao, J. Transit-oriented autonomous vehicle operation with integrated demand-supply interaction. Transp. Res. Part C Emerg. Technol. 2018, 97, 216–234. [Google Scholar] [CrossRef]
- Parkes, S.D.; Marsden, G.; Shaheen, S.A.; Cohen, A.P. Understanding the diffusion of public bikesharing systems: Evidence from Europe and North America. J. Transp. Geogr. 2013, 31, 94–103. [Google Scholar] [CrossRef]
- Shaheen, S.A.; Cohen, A.P.; Martin, E.W. Public Bikesharing in North America: Early Operator Understanding and Emerging Trends. Transp. Res. Rec. 2013, 2387, 83–92. [Google Scholar] [CrossRef]
- Ashqar, H.I. Strategic Design of Smart Bike-Sharing Systems for Smart Cities. Ph.D. Thesis, Virginia Tech, Blacksburg, VA, USA, 2018. [Google Scholar]
- Chen, Z.; van Lierop, D.; Ettema, D. Dockless bike-sharing systems: What are the implications? Transp. Rev. 2020, 40, 333–353. [Google Scholar] [CrossRef]
- Loidl, M.; Witzmann-Müller, U.; Zagel, B. A spatial framework for Planning station-based bike sharing systems. Eur. Transp. Res. Rev. 2019, 11, 9. [Google Scholar] [CrossRef]
- Shen, Y.; Zhang, X.; Zhao, J. Understanding the usage of dockless bike sharing in Singapore. Int. J. Sustain. Transp. 2018, 12, 686–700. [Google Scholar] [CrossRef]
- Zhu, R.; Zhang, X.; Kondor, D.; Santi, P.; Ratti, C. Understanding spatio-temporal heterogeneity of bike-sharing and scooter-sharing mobility. Comput. Environ. Urban Syst. 2020, 81, 101483. [Google Scholar] [CrossRef]
- Beauvoir, V.; Moylan, E. Unreliability of Delay Caused by Bike Unavailability in Bike Share Systems. Transp. Res. Rec. 2020. [Google Scholar] [CrossRef]
- Ma, Y.; Lan, J.; Thornton, T.; Mangalagiu, D.; Zhu, D. Challenges of collaborative governance in the sharing economy: The case of free-floating bike sharing in Shanghai. J. Clean. Prod. 2018, 197, 356–365. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, D.; Zhang, X.; Tu, W.; Chen, Y.; Shen, Y.; Ratti, C. Unravel the landscape and pulses of cycling activities from a dockless bike-sharing system. Comput. Environ. Urban Syst. 2019, 75, 184–203. [Google Scholar] [CrossRef]
- Howe, E.B. Global Scootersharing Market Report 2018; InnoZ-Innovation Centre for Mobility and Societal Change (InnoZ) GmbH: Berlin, Germany, 2018. [Google Scholar]
- Nelson, S. E-Scooter Companies Find Success Despite Business Model Difficulties. The Brussels Times, 7 December 2019. [Google Scholar]
- DeMaio, P.; Gifford, J. Smart Bikes: Public Transportation for the 21st Century. Transp. Q. 2003, 57, 9. [Google Scholar]
- DeMaio, P.; Gifford, J. Will Smart Bikes Succeed as Public Transportation in the United States? J. Public Transp. 2004, 7, 1–15. [Google Scholar] [CrossRef] [Green Version]
- DeMaio, P. Bike-sharing: History, impacts, models of provision, and future. J. Public Transp. 2009, 14, 41–56. [Google Scholar] [CrossRef]
- Ashqar, H.I.; Almannaa, M.H.; Elhenawy, M.; Rakha, H.A.; House, L. Smartphone Transportation Mode Recognition Using a Hierarchical Machine Learning Classifier and Pooled Features From Time and Frequency Domains. IEEE Trans. Intell. Transp. Syst. 2019, 20, 244–252. [Google Scholar] [CrossRef] [Green Version]
- Fishman, E. Bikeshare: A Review of Recent Literature. Transp. Rev. 2016, 36, 92–113. [Google Scholar] [CrossRef]
- Wang, I.; Wang, C. Analyzing Bike Repositioning Strategies Based on Simulations for Public Bike Sharing Systems: Simulating Bike Repositioning Strategies for Bike Sharing Systems. In Proceedings of the 2013 Second IIAI International Conference on Advanced Applied Informatics, Los Alamitos, CA, USA, 31 August–4 September 2013; pp. 306–311. [Google Scholar]
- Ashqar, H.I.; Elhenawy, M.; Almannaa, M.H.; Ghanem, A.; Rakha, H.A.; House, L. Modeling bike availability in a bike-sharing system using machine learning. In Proceedings of the 2017 5th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Napoli, Italy, 26–28 June 2017; pp. 374–378. [Google Scholar]
- Almannaa, M.H.; Elhenawy, M.; Ghanem, A.; Ashqar, H.I.; Rakha, H.A. Network-wide bike availability clustering using the college admission algorithm: A case study of San Francisco Bay area. In Proceedings of the 2017 5th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Napoli, Italy, 26–28 June 2017; pp. 580–585. [Google Scholar]
- Ghanem, A.; Elhenawy, M.; Almannaa, M.; Ashqar, H.I.; Rakha, H.A. Bike share travel time modeling: San Francisco bay area case study. In Proceedings of the 2017 5th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Napoli, Italy, 26–28 June 2017; pp. 586–591. [Google Scholar]
- Xu, H.; Ying, J. An Improved GRASP for the Bike-Sharing Rebalancing Problem. In Proceedings of the 2017 International Conference on Smart Grid and Electrical Automation (ICSGEA), Changsha, China, 27–28 May 2017; pp. 324–328. [Google Scholar]
- Ashqar, H.I.; Elhenawy, M.; Rakha, H.A.; Almannaa, M.; House, L. Network and Station-Level Bike-Sharing System Prediction: A San Francisco Bay Area Case Study. arXiv 2020, arXiv:2009.09367. [Google Scholar]
- Ruffieux, S.; Mugellini, E.; Khaled, O.A. Bike Usage Forecasting for Optimal Rebalancing Operations in Bike-Sharing Systems. In Proceedings of the 2018 IEEE 30th International Conference on Tools with Artificial Intelligence (ICTAI), Volos, Greece, 5–7 November 2018; pp. 854–858. [Google Scholar]
- Wu, S.J.; Lun, L.W.; Chan, J.; Yang, L.; Wan, I.; Lin, H. Using Mobile Phones to Crowd-source User Flow Data for Assessing Bike Sharing Site Suitability. In Proceedings of the 2018 IEEE Vehicular Networking Conference (VNC), Taipei, Taiwan, 5–7 December 2018; pp. 1–2. [Google Scholar]
- Gimon, D. Bike commuters contribution to balance shared bike systems during peak load. In Proceedings of the 2018 IEEE International Smart Cities Conference (ISC2), Kansas City, MI, USA, 16–19 September 2018; pp. 1–2. [Google Scholar]
- Rakha, H.A.; Almannaa, M.; Ashqar, H.; Elhenawy, M.; Ghanem, A. Traffic State Prediction: A Traveler Equity and Multi-Modal Perspective. 2019. Available online: https://rosap.ntl.bts.gov/view/dot/55598 (accessed on 6 July 2021).
- Rakha, H.A.; Elhenawy, M.; Ashqar, H.I.; Almannaa, M.H.; Ghanem, A. Smart Bike-Sharing Systems for Smart Cities. In Data Analytics for Smart Cities; Amir, A., Buttlar, W.G., Eds.; CRC Press: Boca Raton, FL, USA, 2018; pp. 125–156. [Google Scholar]
- Ashqar, H.I.; Elhenawy, M.; Ghanem, A.; Almannaa, M.H.; Rakha, H.A. Quantifying the effect of various features on the modeling of bike counts in a bike-sharing system. In Proceedings of the Transportation Research Board 97th Annual Meeting Transportation Research Board, Washington, DC, USA, 7–11 January 2018. [Google Scholar]
- Ji, Y.; Jin, X.; Ma, X.; Zhang, S. How Does Dockless Bike-Sharing System Behave by Incentivizing Users to Participate in Rebalancing? IEEE Access 2020, 8, 58889–58897. [Google Scholar] [CrossRef]
- Zou, Z.; Younes, H.; Erdoğan, S.; Wu, J. Exploratory Analysis of Real-Time E-Scooter Trip Data in Washington, D.C. Transp. Res. Rec. 2020. [Google Scholar] [CrossRef]
- Ashqar, H.I.; Elhenawy, M.; Rakha, H.; House, L. Predicting Station Locations in Bike-Sharing Systems Using a Proposed Quality-of-Service Measurement: Methodology and Case Study. In Proceedings of the Transportation Research Board 98th Annual Meeting Transportation Research Board, Washington, DC, USA, 13–17 January 2019. [Google Scholar]
- Rabassa, M.J.; Conte Grand, M.; García-Witulski, C.M. Heat warnings and avoidance behavior: Evidence from a bike-sharing system. Environ. Econ. Policy Stud. 2020. [Google Scholar] [CrossRef]
- Ashqar, H.I.; Elhenawy, M.; Rakha, H.A. Modeling bike counts in a bike-sharing system considering the effect of weather conditions. Case Stud. Transp. Policy 2019, 7, 261–268. [Google Scholar] [CrossRef]
- Buck, D.; Buehler, R. Bike Lanes and Other Determinants of Capital Bikeshare Trips. In Proceedings of the Transportation Research Board 91st Annual Meeting, Washington, DC, USA, 22–26 January 2012. [Google Scholar]
- Almannaa, M.H.; Ashqar, H.I.; Elhenawy, M.; Masoud, M.; Rakotonirainy, A.; Rakha, H. A Comparative Analysis of E-Scooter and E-Bike Usage Patterns: Findings from the City of Austin, TX. arXiv 2020, arXiv:2006.04033. [Google Scholar]
- Rahim Taleqani, A.; Hough, J.; Nygard, K.E. Public Opinion on Dockless Bike Sharing: A Machine Learning Approach. Transp. Res. Rec. 2019, 2673, 195–204. [Google Scholar] [CrossRef]
- City of Austin Texas. Dockless Vehicle Trips—Open Data. Available online: https://data.austintexas.gov/Transportation-and-Mobility/Dockless-Vehicle-Trips/7d8e-dm7r (accessed on 2 May 2021).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operator | E-Scooters | E-Bikes |
|---|---|---|
| Bird | 4500 | 0 |
| JUMP | 2500 | 2000 |
| Lime | 5000 | 0 |
| Lyft | 2000 | 0 |
| OjO | 100 | 0 |
| Skip | 500 | 0 |
| Spin | 500 | 0 |
| VeoRide | 300 | 50 |
| Total | 15,400 | 2050 |
| Scenarios | Rules | X1 | X2 | X3 |
|---|---|---|---|---|
| Scenario 1 | Rules 1 and 5 | 0 | 0 | 0 |
| Scenario 2 | Rules 2 and 5 | 1 | 0 | 0 |
| Scenario 3 | Rules 3 and 5 | 0 | 1 | 0 |
| Scenario 4 | Rules 4 and 5 | 0 | 0 | 1 |
| E-Scooter Number and Battery Ranges | X1 | X2 | X3 |
|---|---|---|---|
| 50 E-scooters of 35 km range | 0.67111 | <0.0001 | <0.0001 |
| 50 E-scooters of 45 km range | 0.70196 | <0.0001 | <0.0001 |
| 50 E-scooters of 60 km range | 0.64689 | <0.0001 | <0.0001 |
| 100 E-scooters of 35 km range | 0.00899 | <0.0001 | <0.0001 |
| 100 E-scooters of 45 km range | 0.00255 | <0.0001 | <0.0001 |
| 100 E-scooters of 60 km range | 0.00304 | <0.0001 | <0.0001 |
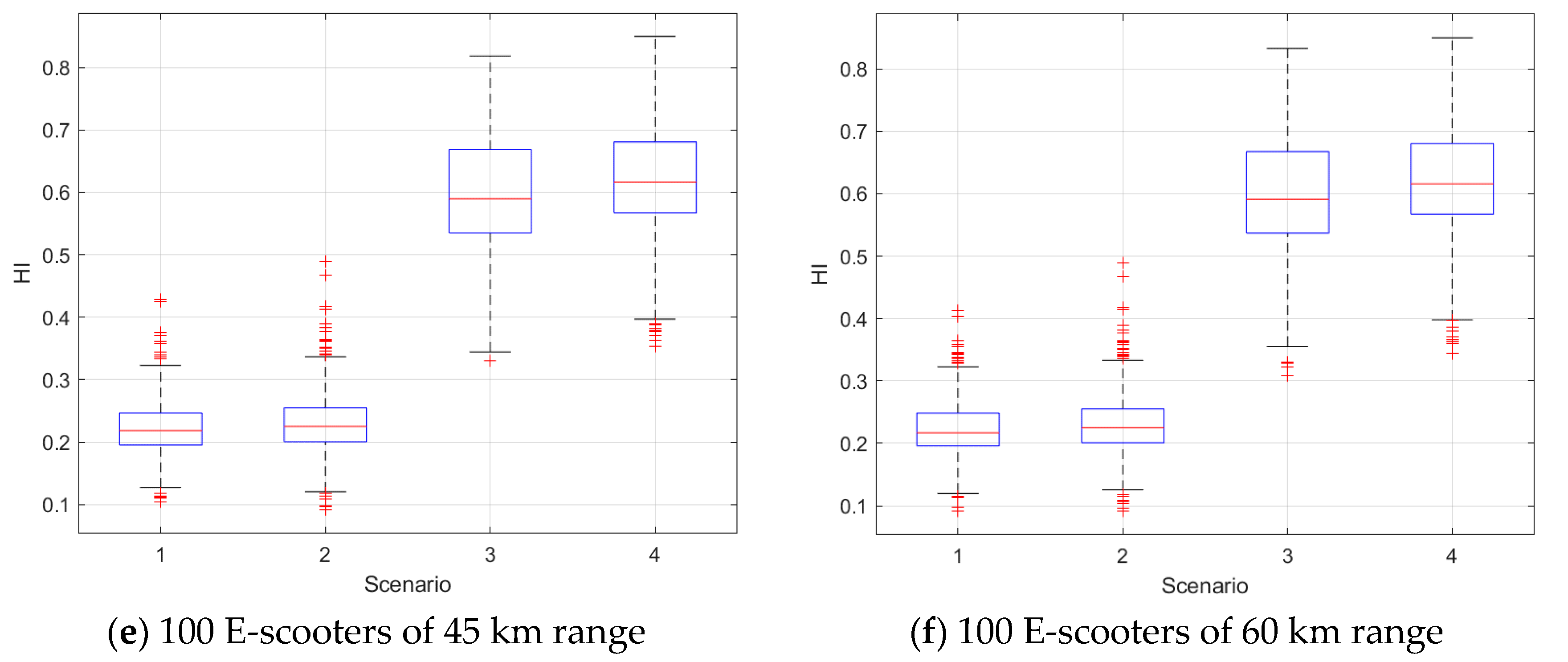
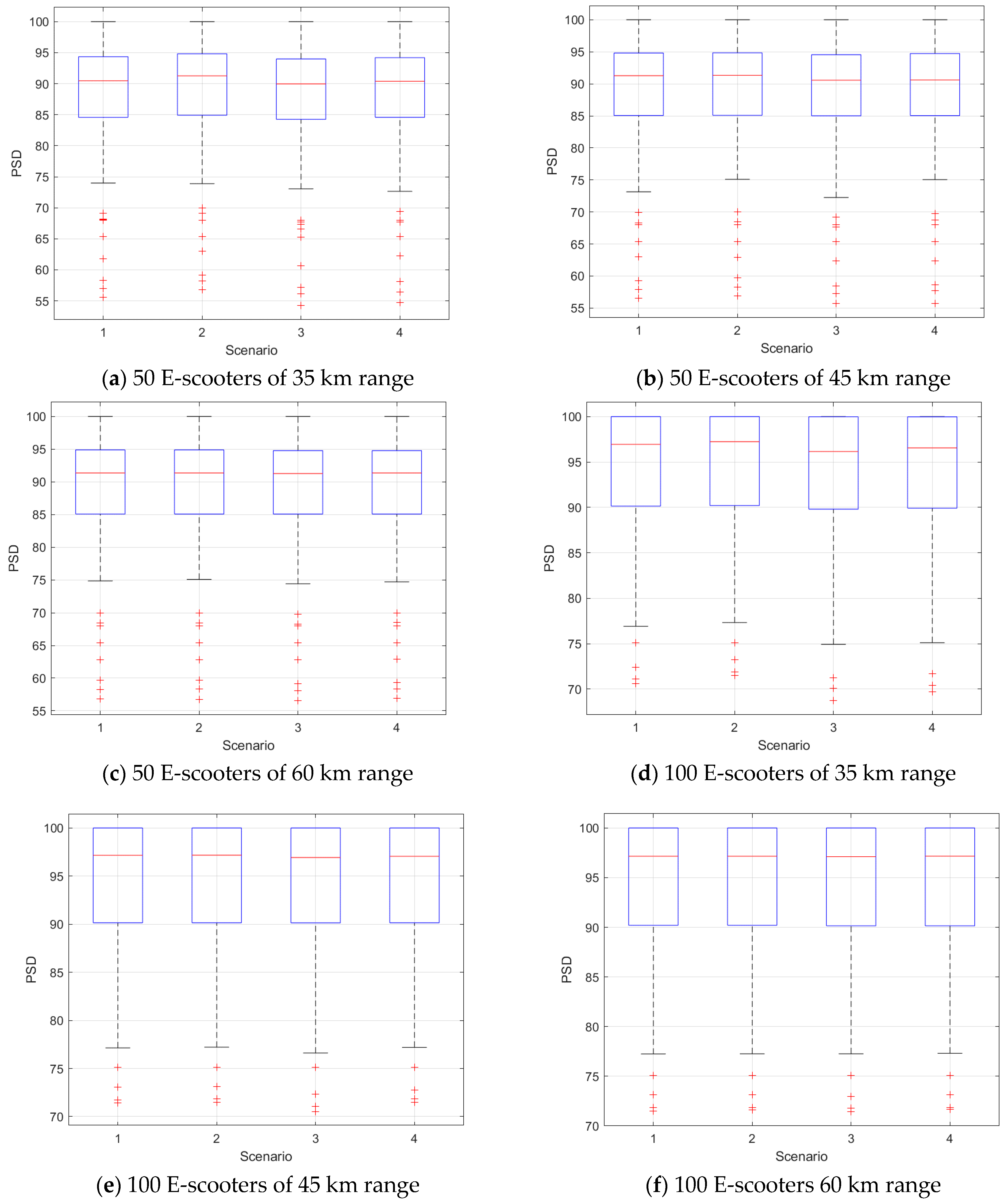
| E-Scooter Number and Battery Ranges | X1 | X2 | X3 |
|---|---|---|---|
| 50 E-scooters of 35 km range | <0.0001 | <0.0001 | 0.3976 |
| 50 E-scooters of 45 km range | 0.0064019 | <0.0001 | <0.0001 |
| 50 E-scooters of 60 km range | 0.1667 | <0.0001 | 0.051345 |
| 100 E-scooters of 35 km range | 0.0027793 | <0.0001 | <0.0001 |
| 100 E-scooters of 45 km range | 0.34828 | <0.0001 | 0.206 |
| 100 E-scooters of 60 km range | 0.55138 | 0.0026561 | 0.26083 |
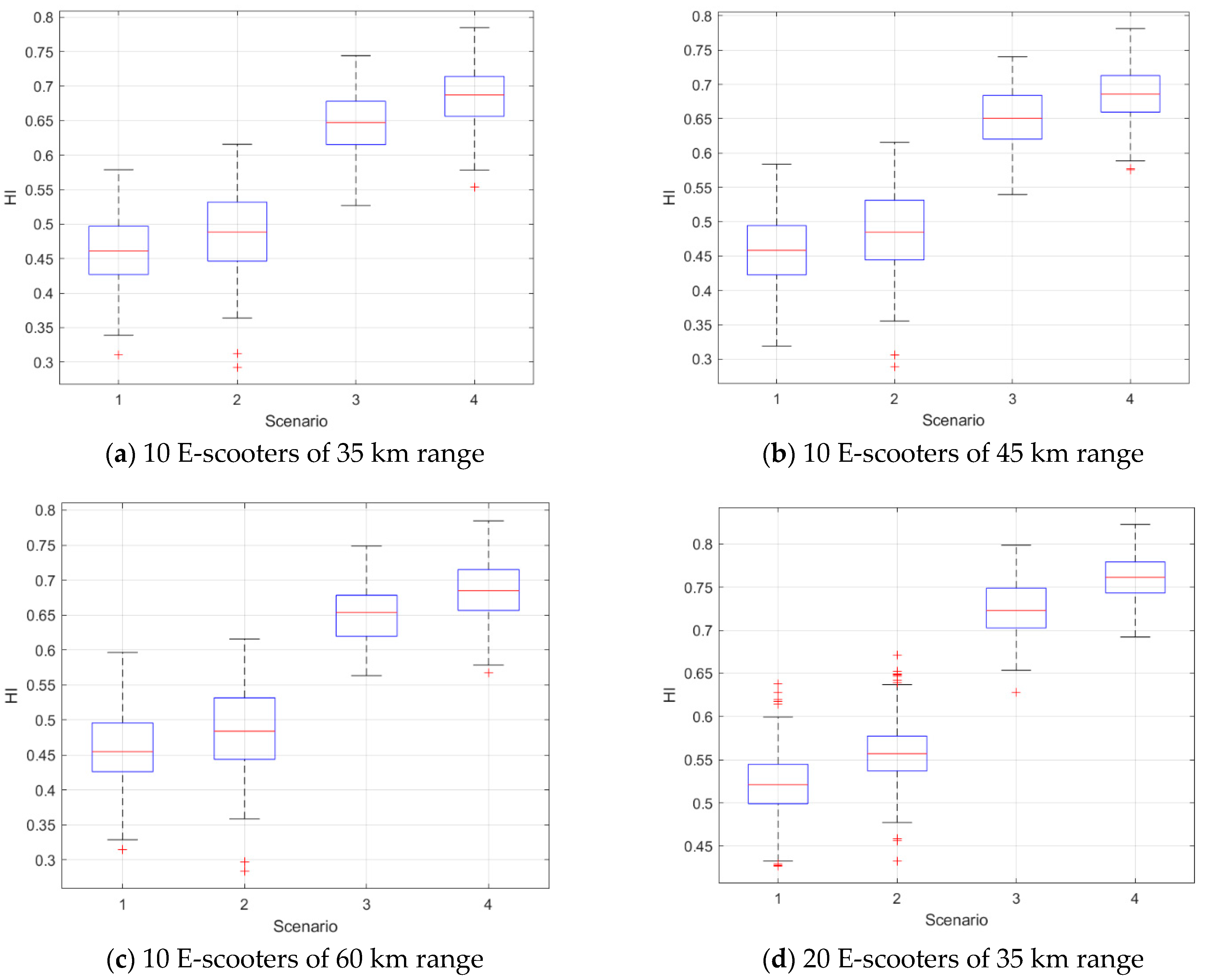
| E-Scooter Number and Battery Ranges | X1 | X2 | X3 |
|---|---|---|---|
| 10 E-scooters of 35 km range | <0.0001 | <0.0001 | <0.0001 |
| 10 E-scooters of 45 km range | <0.0001 | <0.0001 | <0.0001 |
| 10 E-scooters of 60 km range | <0.0001 | <0.0001 | <0.0001 |
| 20 E-scooters of 35 km range | <0.0001 | <0.0001 | <0.0001 |
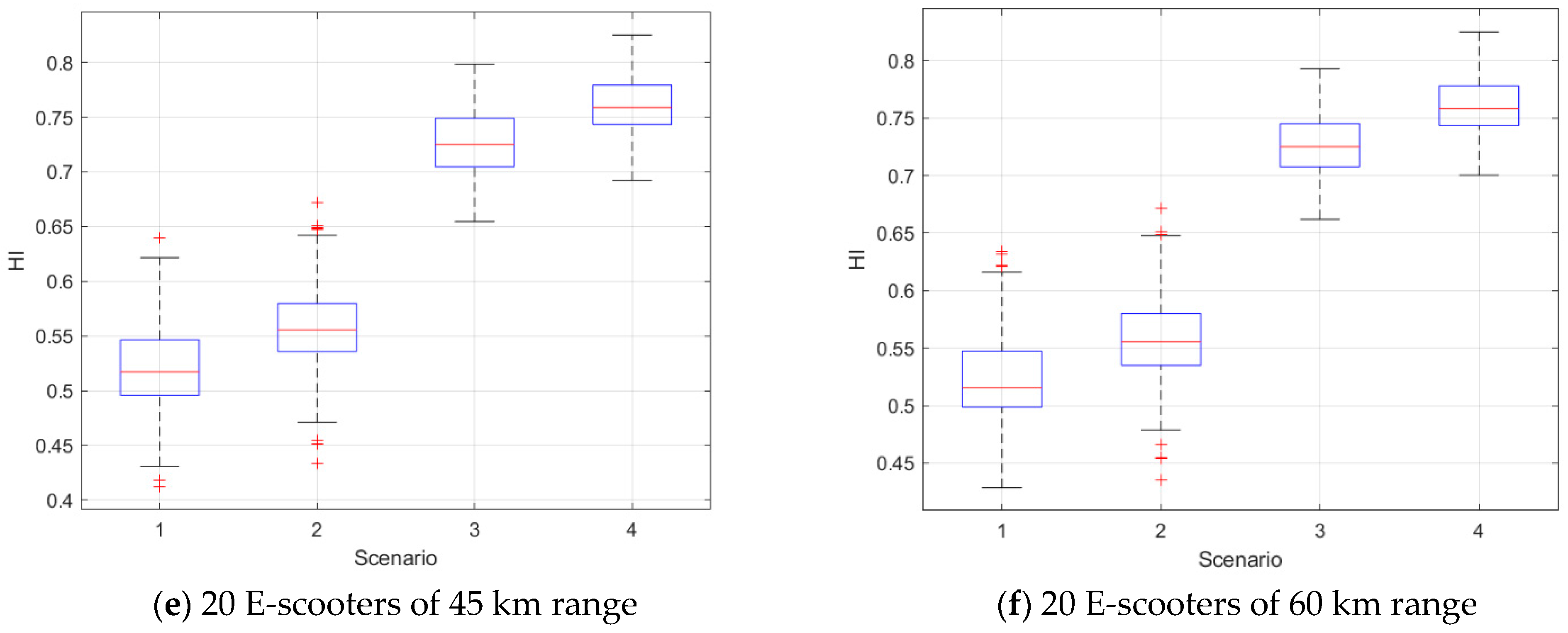
| 20 E-scooters of 45 km range | <0.0001 | <0.0001 | <0.0001 |
| 20 E-scooters of 60 km range | <0.0001 | <0.0001 | <0.0001 |
| E-Scooter Number and Battery Ranges | X1 | X2 | X3 |
|---|---|---|---|
| 10 E-scooters of 35 km range | <0.0001 | <0.0001 | 0.68926 |
| 10 E-scooters of 45 km range | <0.0001 | <0.0001 | 0.40153 |
| 10 E-scooters of 60 km range | <0.0001 | <0.0001 | 0.082923 |
| 20 E-scooters of 35 km range | <0.0001 | <0.0001 | 0.91115 |
| 20 E-scooters of 45 km range | <0.0001 | <0.0001 | 0.8515 |
| 20 E-scooters of 60 km range | 0.0059286 | <0.0001 | 0.55803 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elhenawy, M.; Komol, M.R.; Masoud, M.; Liu, S.Q.; Ashqar, H.I.; Almannaa, M.H.; Rakha, H.A.; Rakotonirainy, A. A Novel Crowdsourcing Model for Micro-Mobility Ride-Sharing Systems. Sensors 2021, 21, 4636. https://doi.org/10.3390/s21144636
Elhenawy M, Komol MR, Masoud M, Liu SQ, Ashqar HI, Almannaa MH, Rakha HA, Rakotonirainy A. A Novel Crowdsourcing Model for Micro-Mobility Ride-Sharing Systems. Sensors. 2021; 21(14):4636. https://doi.org/10.3390/s21144636
Chicago/Turabian StyleElhenawy, Mohammed, Mostafizur R. Komol, Mahmoud Masoud, Shi Qiang Liu, Huthaifa I. Ashqar, Mohammed Hamad Almannaa, Hesham A. Rakha, and Andry Rakotonirainy. 2021. "A Novel Crowdsourcing Model for Micro-Mobility Ride-Sharing Systems" Sensors 21, no. 14: 4636. https://doi.org/10.3390/s21144636
APA StyleElhenawy, M., Komol, M. R., Masoud, M., Liu, S. Q., Ashqar, H. I., Almannaa, M. H., Rakha, H. A., & Rakotonirainy, A. (2021). A Novel Crowdsourcing Model for Micro-Mobility Ride-Sharing Systems. Sensors, 21(14), 4636. https://doi.org/10.3390/s21144636