
Spatially Resolved Experimental Modal Analysis on High-Speed Composite Rotors Using a Non-Contact, Non-Rotating Sensor

 , ,
, ,  , , and
, , and
Abstract
:1. Introduction
2. Theory
2.1. Rotating Frame Measurement (RFM)
2.2. Stationary Frame Measurement (SFM)
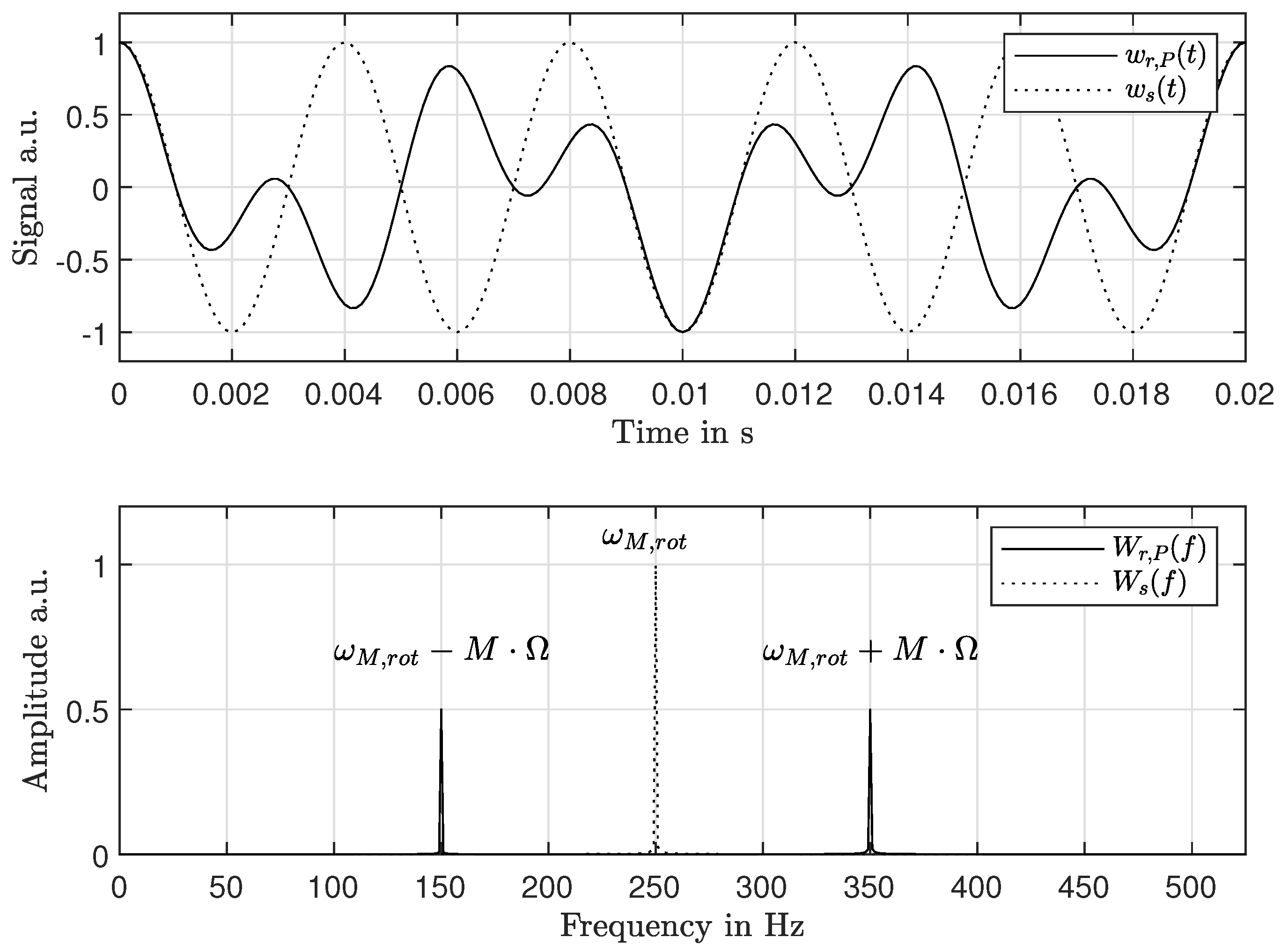
2.3. Rotating Frame Measurement from the Stationary Frame (RSFM)
3. Verification of RSFM
4. Experimental Results
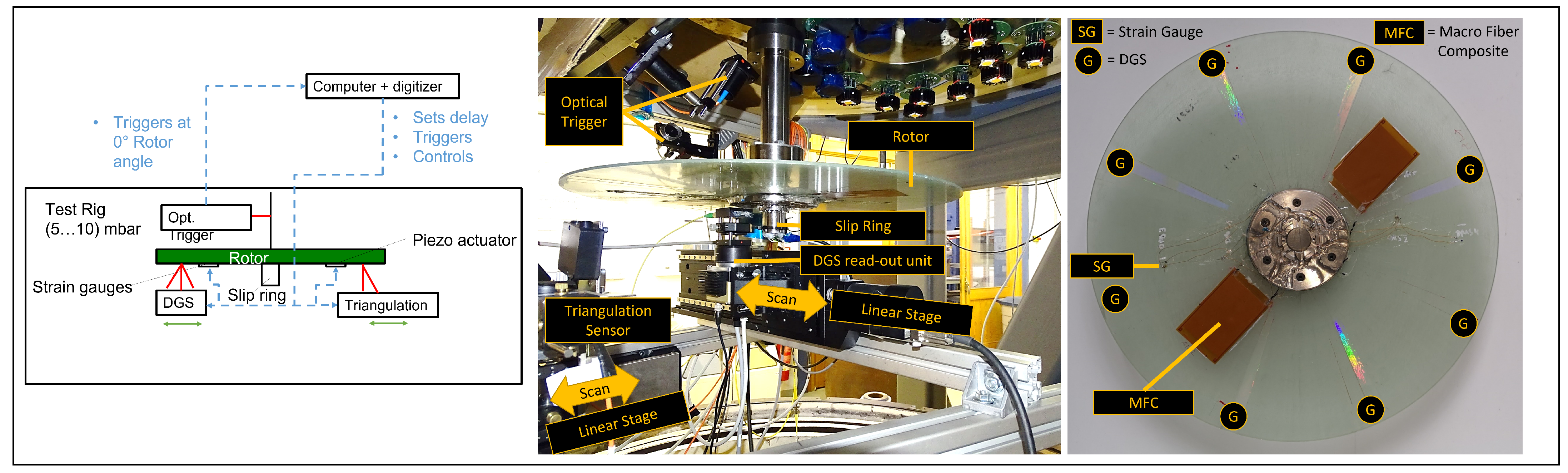
4.1. Setup and Measurement Procedure
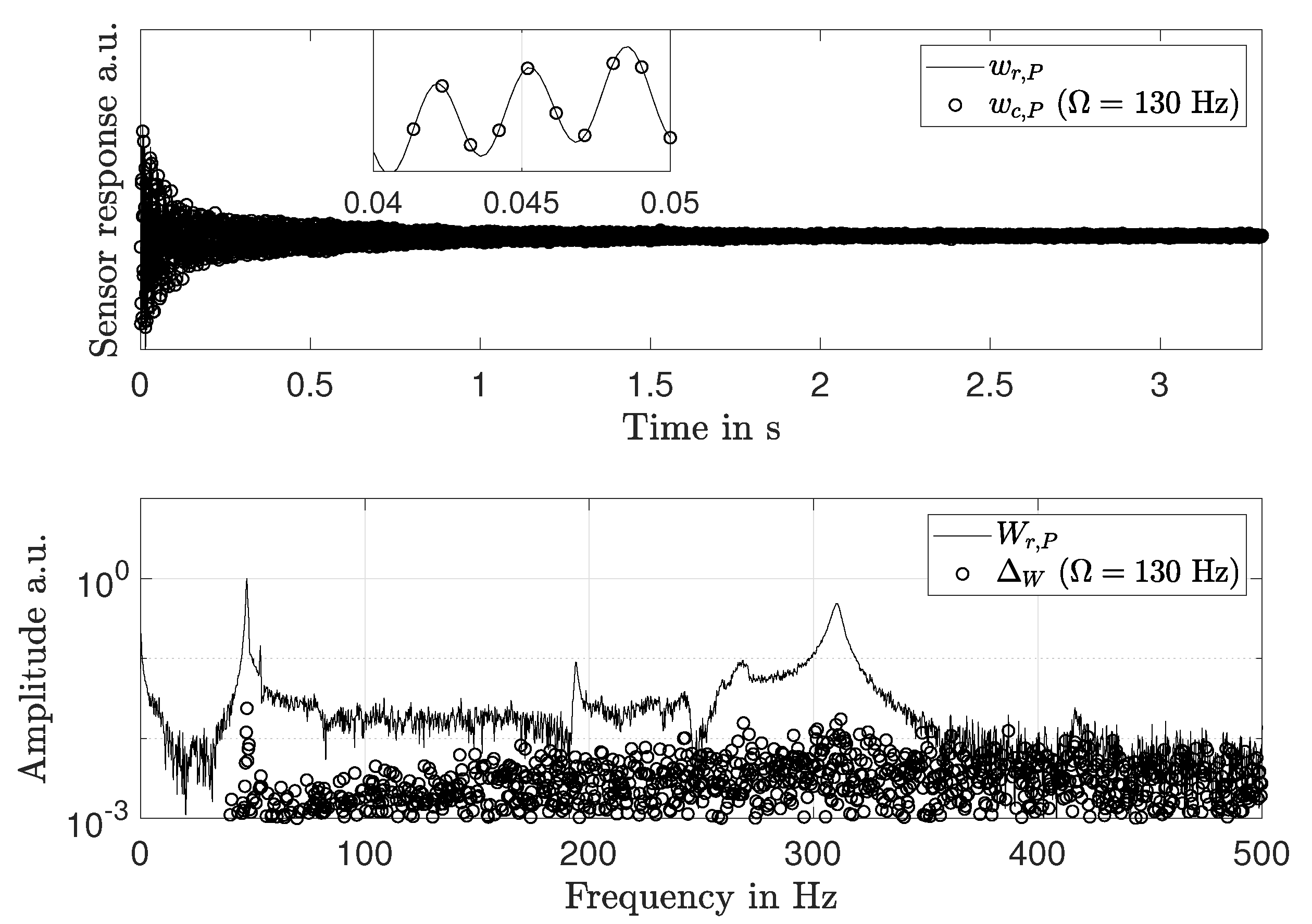
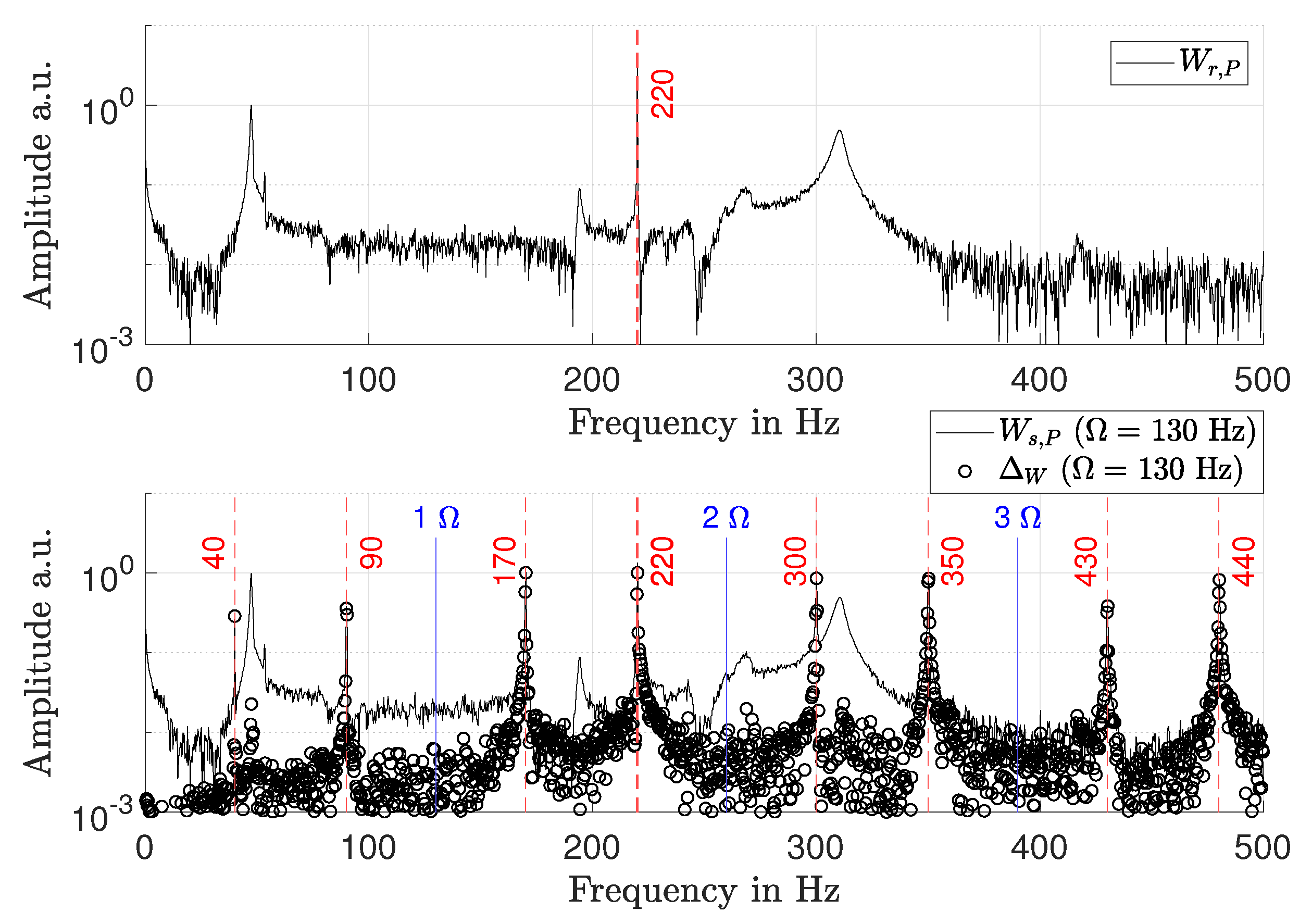
4.2. Response Spectra and Mode Shapes
4.3. Measurement Uncertainty
4.4. Comparison between SFM and RSFM on a Disk-Like Structure
5. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Scavuzzo, R.W.; Richards, T.R.; Charek, L. Tire vibration modes and effects on vehicle ride quality. Tire Sci. Technol. 1993, 21, 23–39. [Google Scholar] [CrossRef]
- Wollmann, T.; Modler, N.; Dannemann, M.; Langkamp, A.; Nitschke, S.; Filippatos, A. Design and testing of composite compressor blades with focus on the vibration behaviour. Compos. Part A Appl. Sci. Manuf. 2017, 92, 183–189. [Google Scholar] [CrossRef]
- Brøndsted, P.; Lilholt, H.; Lystrup, A. Composite materials for wind power turbine blades. Annu. Rev. Mater. Res. 2005, 35, 505–538. [Google Scholar] [CrossRef]
- Jalali, M.H.; Ghayour, M.; Ziaei-Rad, S.; Shahriari, B. Dynamic analysis of a high speed rotor-bearing system. Measurement 2014, 53, 1–9. [Google Scholar] [CrossRef]
- Fu, Z.F.; He, J. Modal Analysis; Elsevier: Amsterdam, The Netherlands, 2001. [Google Scholar]
- Dudek, K. New type of rotation of chiral mechanical metamaterials. Smart Mater. Struct. 2020, 29, 115027. [Google Scholar] [CrossRef]
- Presas, A.; Egusquiza, E.; Valero, C.; Valentin, D.; Seidel, U. Feasibility of using PZT actuators to study the dynamic behavior of a rotating disk due to rotor-stator interaction. Sensors 2014, 14, 11919–11942. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Valentín, D.; Presas, A.; Bossio, M.; Egusquiza, M.; Egusquiza, E.; Valero, C. Feasibility of detecting natural frequencies of hydraulic turbines while in operation, using strain gauges. Sensors 2018, 18, 174. [Google Scholar] [CrossRef] [Green Version]
- Presas, A.; Valentin, D.; Egusquiza, E.; Valero, C.; Egusquiza, M.; Bossio, M. Accurate determination of the frequency response function of submerged and confined structures by using PZT-patches. Sensors 2017, 17, 660. [Google Scholar] [CrossRef] [Green Version]
- Gude, M.; Filippatos, A.; Langkamp, A.; Hufenbach, W.; Kuschmierz, R.; Fischer, A.; Czarske, J. Model assessment of a composite mock-up bladed rotor based on its vibration response and radial expansion. Compos. Struct. 2015, 124, 394–401. [Google Scholar] [CrossRef]
- Peng, G.D. Handbook of Optical Fibers; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Beauseroy, P.; Lengellé, R. Nonintrusive turbomachine blade vibration measurement system. Mech. Syst. Signal Process. 2007, 21, 1717–1738. [Google Scholar] [CrossRef]
- Baqersad, J.; Poozesh, P.; Niezrecki, C.; Avitabile, P. Photogrammetry and optical methods in structural dynamics–A review. Mech. Syst. Signal Process. 2017, 86, 17–34. [Google Scholar] [CrossRef]
- Kuschmierz, R.; Filippatos, A.; Günther, P.; Langkamp, A.; Hufenbach, W.; Czarske, J.; Fischer, A. In-process, non-destructive, dynamic testing of high-speed polymer composite rotors. Mech. Syst. Signal Process. 2015, 54, 325–335. [Google Scholar] [CrossRef]
- Zhang, H.; Anders, D.; Löser, M.; Ihlenfeldt, S.; Czarske, J.; Kuschmierz, R. Non-contact, bi-directional tool tip vibration measurement in CNC milling machines with a single optical sensor. Mech. Syst. Signal Process. 2020, 139, 106647. [Google Scholar] [CrossRef]
- Stanbridge, A.; Ewins, D. Modal testing using a scanning laser Doppler vibrometer. Mech. Syst. Signal Process. 1999, 13, 255–270. [Google Scholar] [CrossRef]
- Rothberg, S.; Allen, M.; Castellini, P.; Di Maio, D.; Dirckx, J.; Ewins, D.; Halkon, B.J.; Muyshondt, P.; Paone, N.; Ryan, T.; et al. An international review of laser Doppler vibrometry: Making light work of vibration measurement. Opt. Lasers Eng. 2017, 99, 11–22. [Google Scholar] [CrossRef] [Green Version]
- Di Maio, D.; Castellini, P.; Martarelli, M.; Rothberg, S.; Allen, M.; Zhu, W.; Ewins, D. Continuous Scanning Laser Vibrometry: A raison d’être and applications to vibration measurements. Mech. Syst. Signal Process. 2021, 156, 107573. [Google Scholar] [CrossRef]
- Heller, D.; Sever, I.; Schwingshackl, C. A method for multi-harmonic vibration analysis of turbomachinery blades using Blade Tip-Timing and clearance sensor waveforms and optimization techniques. Mech. Syst. Signal Process. 2020, 142, 106741. [Google Scholar] [CrossRef]
- Subramani, D.; Ramamurti, V.; Sridhara, K. Numerical analysis and experimental verification of the radial growth of a turbocharger centrifugal compressor impeller. J. Strain Anal. Eng. Des. 1997, 32, 119–128. [Google Scholar] [CrossRef]
- Hashimoto, M.; Marui, E.; Kato, S. Experimental research on cutting force variation during regenerative chatter vibration in a plain milling operation. Int. J. Mach. Tools Manuf. 1996, 36, 1073–1092. [Google Scholar] [CrossRef]
- Lich, J.; Wollmann, T.; Filippatos, A.; Gude, M.; Czarske, J.; Kuschmierz, R. Diffraction-grating-based in situ displacement, tilt, and strain measurements on high-speed composite rotors. Appl. Opt. 2019, 58, 8021–8030. [Google Scholar] [CrossRef] [PubMed]
- Filippatos, A.; Wollmann, T.; Nguyen, M.; Kostka, P.; Dannemann, M.; Langkamp, A.; Salles, L.; Gude, M. Design and testing of a co-rotating vibration excitation system. Sensors 2019, 19, 92. [Google Scholar] [CrossRef] [Green Version]
- Bucher, I.; Ewins, D. Modal analysis and testing of rotating structures. Philos. Trans. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 2001, 359, 61–96. [Google Scholar] [CrossRef]
- Presas, A.; Valentin, D.; Egusquiza, E.; Valero, C.; Seidel, U. On the detection of natural frequencies and mode shapes of submerged rotating disk-like structures from the casing. Mech. Syst. Signal Process. 2015, 60, 547–570. [Google Scholar] [CrossRef] [Green Version]
- Presas, A.; Valentin, D.; Valero, C.; Egusquiza, M.; Egusquiza, E. Experimental measurements of the natural frequencies and mode shapes of rotating disk-blades-disk assemblies from the stationary frame. Appl. Sci. 2019, 9, 3864. [Google Scholar] [CrossRef] [Green Version]
- Warren, C.; Niezrecki, C.; Avitabile, P. Optical non-contacting vibration measurement of rotating turbine blades II. In Structural Dynamics and Renewable Energy, Volume 1; Springer: Berlin/Heidelberg, Germany, 2011; pp. 39–44. [Google Scholar]
- Pan, B.; Qian, K.; Xie, H.; Asundi, A. Two-dimensional digital image correlation for in-plane displacement and strain measurement: A review. Meas. Sci. Technol. 2009, 20, 062001. [Google Scholar] [CrossRef]
- Gwashavanhu, B.; Oberholster, A.J.; Heyns, P.S. Rotating blade vibration analysis using photogrammetry and tracking laser Doppler vibrometry. Mech. Syst. Signal Process. 2016, 76, 174–186. [Google Scholar] [CrossRef] [Green Version]
- Halkon, B.J.; Rothberg, S. Vibration measurements using continuous scanning laser vibrometry: Advanced aspects in rotor applications. Mech. Syst. Signal Process. 2006, 20, 1286–1299. [Google Scholar] [CrossRef]
- Wollmann, T.; Koch, E.; Lich, J.; Vater, M.; Kuschmierz, R.; Schnabel, C.; Czarske, J.; Filippatos, A.; Gude, M. Motion blur suppression by using an optical derotator for deformation measurement of rotating components. In Nondestructive Characterization and Monitoring of Advanced Materials, Aerospace, Civil Infrastructure, and Transportation IX; International Society for Optics and Photonics: Bellingham, WA, USA, 2020; Volume 11380, p. 1138016. [Google Scholar]
- Wollmann, T.; Dannemann, M.; Langkamp, A.; Modler, N.; Gude, M.; Salles, L.; Hoffmann, N.; Filippatos, A. Combined experimental-numerical approach for the 3D vibration analysis of rotating composite compressor blades: An introduction. In Proceeding of the 18th European Conference on Composite Materials (ECCM 2018), Athens, Greece, 25–28 June 2018. [Google Scholar]
- Gasparoni, A.; Allen, M.S.; Yang, S.; Sracic, M.W.; Castellini, P.; Tomasini, E.P. Experimental Modal Analysis on a Rotating Fan Using Tracking-CSLDV. In Proceedings of the AIP Conference Proceedings; American Institute of Physics: College Park, MD, USA, 2010; Volume 1253, pp. 3–16. [Google Scholar]
- Shannon, C.E. Communication in the presence of noise. Proc. IRE 1949, 37, 10–21. [Google Scholar] [CrossRef]
- Marvasti, F. Nonuniform Sampling: Theory and Practice; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Xu, L.; Zhang, F.; Tao, R. Randomized nonuniform sampling and reconstruction in fractional Fourier domain. Signal Process. 2016, 120, 311–322. [Google Scholar] [CrossRef] [Green Version]
- Rizo-Patron, S.; Sirohi, J. Operational modal analysis of a helicopter rotor blade using digital image correlation. Exp. Mech. 2017, 57, 367–375. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name, Note | in Hz | in Hz | in Hz | in Hz | in Hz |
|---|---|---|---|---|---|
| M2, | 167.0 | 166.6 | −200 | −33.4 | 33.7 |
| +200 | 366.6 | 366.9 | |||
| M3, | 236.7 | 236.0 | −300 | −64.0 | 64.2 |
| +300 | 536.0 | 536.4 | |||
| M4, | 325.8 | 324.6 | −400 | −75.2 | 75.8 |
| +400 | 724.8 | 725.5 |
| RFM | SFM | RSFM | |
|---|---|---|---|
| Spatial resolution | Low | High | High |
| Excitation function for | arbitrary | Single frequency | Repeatable, |
| unambiguous measurement | (e.g., sweep) | arbitrary | |
| Unknown/out-of-phase | Add up in | Add up | Occur as aliasing |
| excitations | in spectrum | in spectrum | lobes in spectrum |
| Spectral | Peaks at natural | Decomposition | Peaks at natural |
| characteristics | frequencies | necessary | frequencies |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lich, J.; Wollmann, T.; Filippatos, A.; Gude, M.; Czarske, J.; Kuschmierz, R. Spatially Resolved Experimental Modal Analysis on High-Speed Composite Rotors Using a Non-Contact, Non-Rotating Sensor. Sensors 2021, 21, 4705. https://doi.org/10.3390/s21144705
Lich J, Wollmann T, Filippatos A, Gude M, Czarske J, Kuschmierz R. Spatially Resolved Experimental Modal Analysis on High-Speed Composite Rotors Using a Non-Contact, Non-Rotating Sensor. Sensors. 2021; 21(14):4705. https://doi.org/10.3390/s21144705
Chicago/Turabian StyleLich, Julian, Tino Wollmann, Angelos Filippatos, Maik Gude, Juergen Czarske, and Robert Kuschmierz. 2021. "Spatially Resolved Experimental Modal Analysis on High-Speed Composite Rotors Using a Non-Contact, Non-Rotating Sensor" Sensors 21, no. 14: 4705. https://doi.org/10.3390/s21144705