
Water Extraction Method Based on Multi-Texture Feature Fusion of Synthetic Aperture Radar Images

Abstract
:1. Introduction
2. Research Preparation
2.1. Research Area
2.2. Dataset
2.3. Data Preprocessing
3. Water Extraction Algorithm
3.1. Extraction of Texture Features
3.2. Feature Fusion Based on IFS
3.3. Target Segmentation
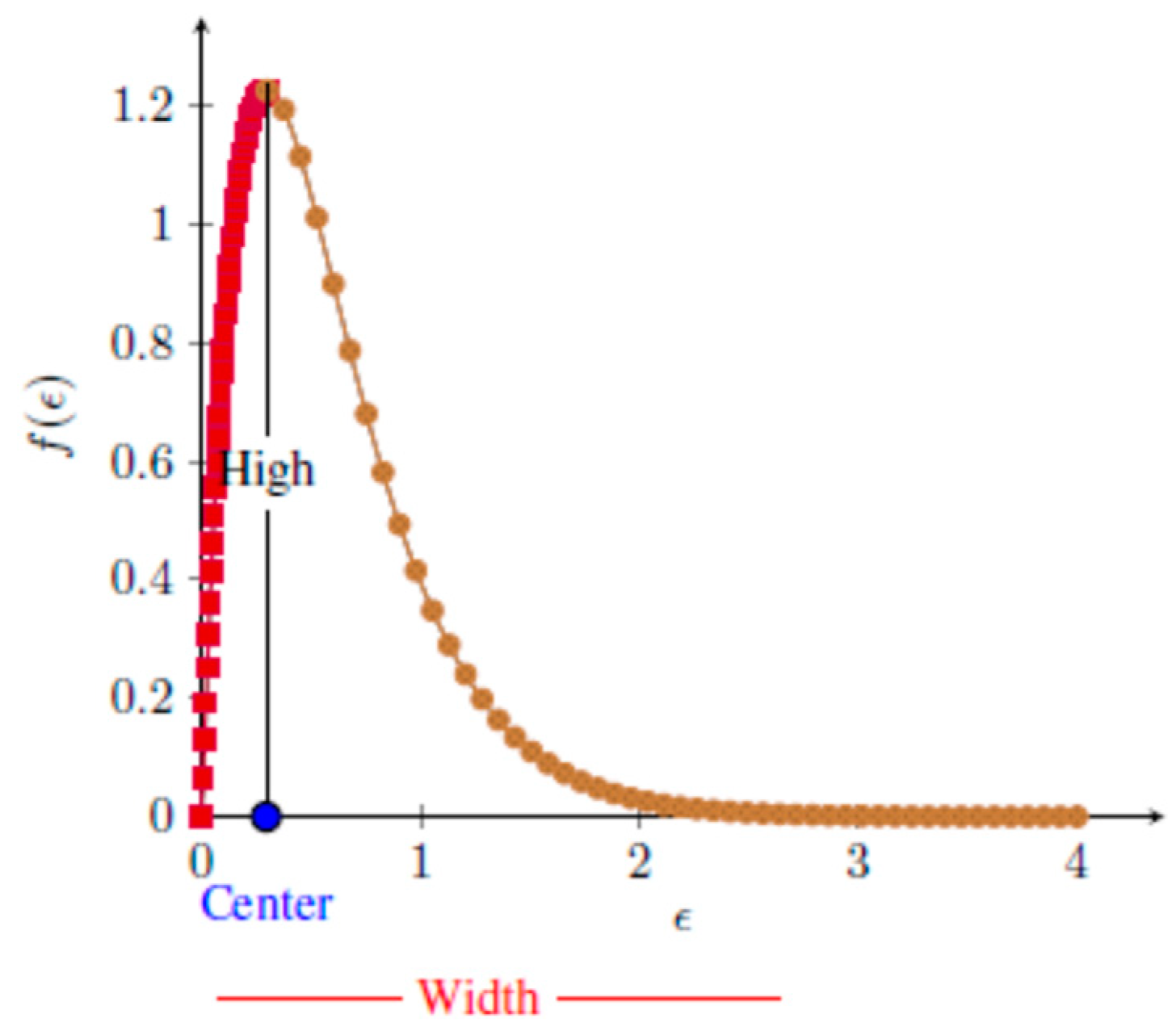
- Calculate the 2D-MFS value f(ϵ) at point I(x,y) according to Equations (16)–(19).
- For each 2D-MFS, its four attributes (maximum, center, width and symmetry) are calculated; each attribute corresponds to an image, and then the four images are squared and added to generate enhanced texture images.
- The K-means method is used for clustering segmentation of the enhanced texture images.
4. Experiment and Discussion
4.1. Algorithm Verification
4.2. Evaluation Metrics
- (1)
- The F1 score is the weighted harmonic mean of precision, and ‘recall’ is used to measure the accuracy of the algorithms. ‘Precision’ is the fraction of the water pixels which are labeled correctly, and ‘recall’ is the fraction of all of the labeled water pixels that are correctly predicted. Thus, the F1 score is given as follows:
- (2)
- False alarm rate (FAR) represents the ratio of dividing a non-water target into a water target. The closer the FAR value is to 0, the better the segmentation results become. A perfect image would give FAR = 0.
- (3)
- Equivalent Number of Looks (ENL) is a parameter of multilook SAR images, and multilooking is performed in order to mitigate speckle noise interference. Therefore, ENL is a measure of the noise intensity of speckle in an image, and its definition is as follows:
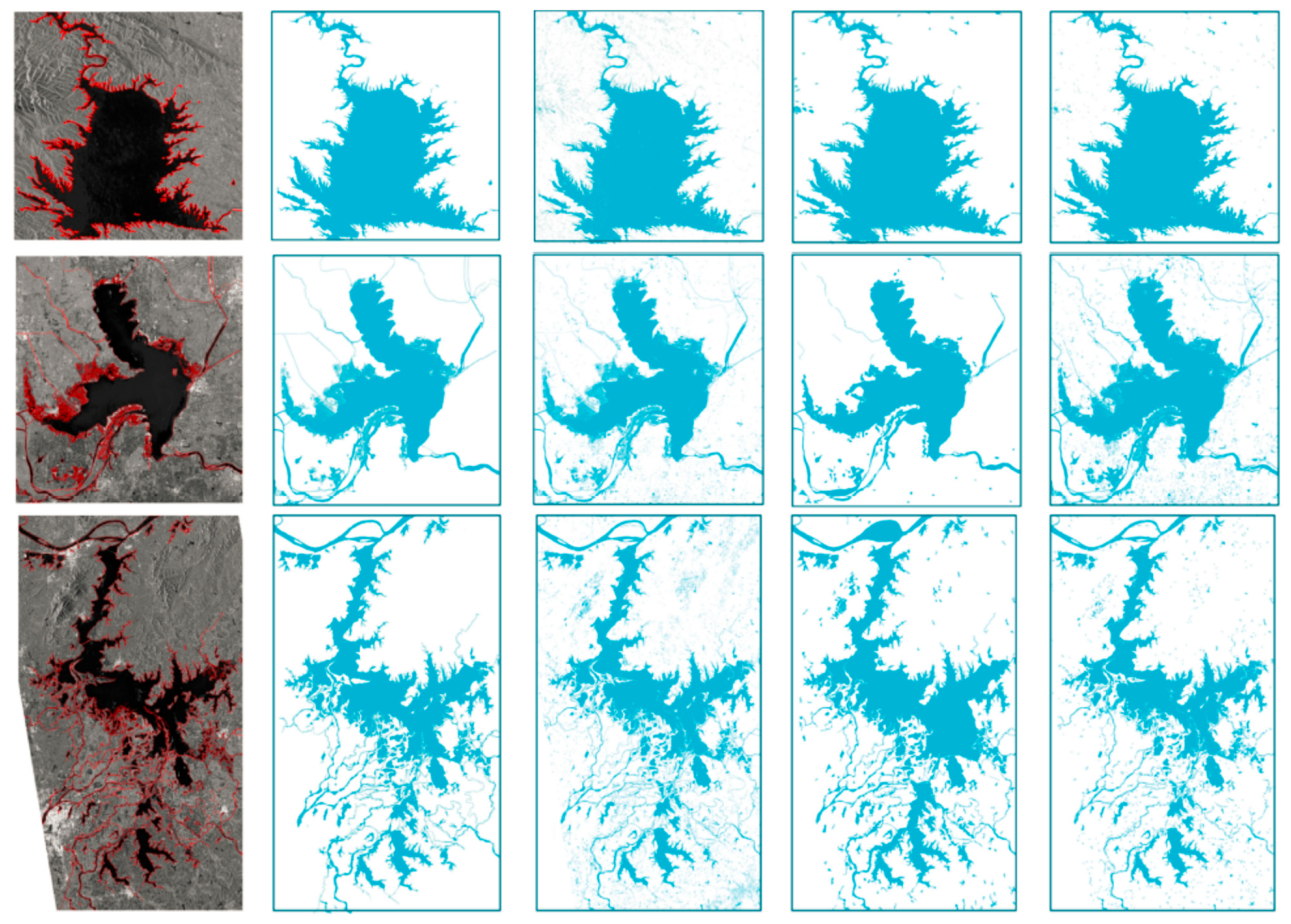
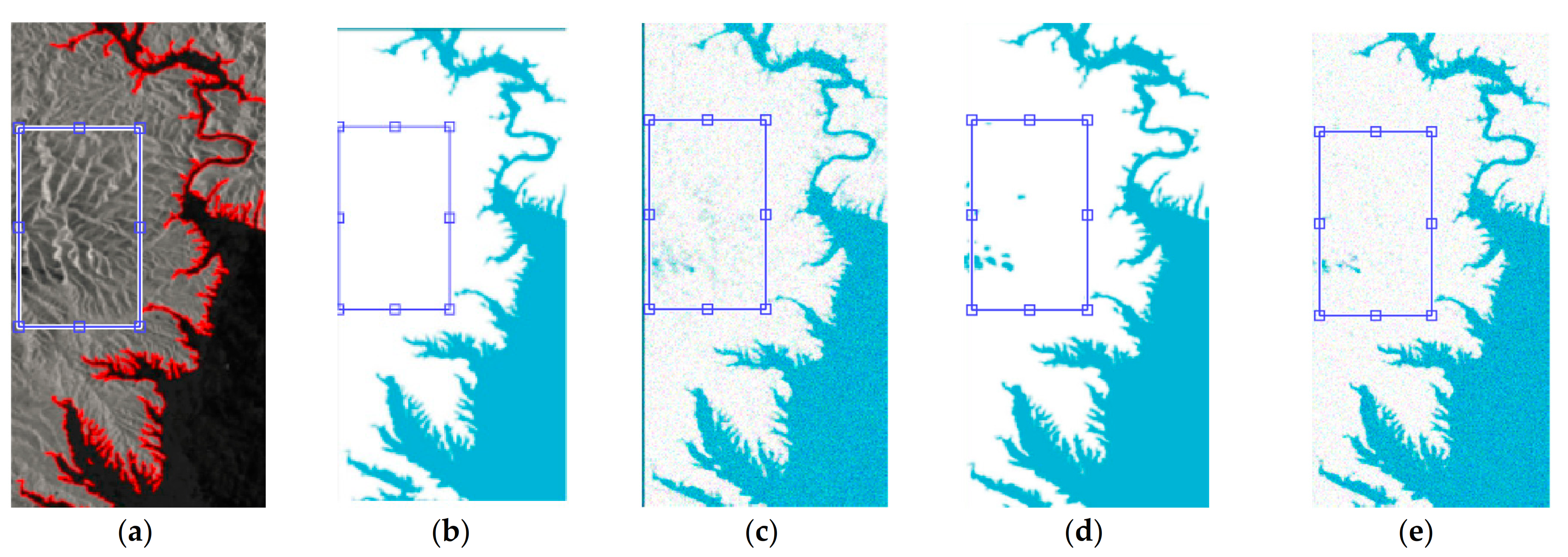
4.3. Comparison and Analysis with Other Algorithms
4.4. Dynamic Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sica, Y.V.; Quintana, R.D.; Radeloff, V.C.; Gavier-Pizarro, G.I. Wetland loss due to land use change in the lower Parana riverdeltaArgentina. Sci. Total Environ. 2016, 15, 967–978. [Google Scholar] [CrossRef] [PubMed]
- Li, N.; Niu, S.; Guo, Z.; Wu, L.; Zhao, J.; Min, L.; Ge, D.; Chen, J. Dynamic waterline mapping of inland great lakes using time-series SAR data from GF-3 and S-1A satellites: A case study of DJK reservoir, China. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 4297–4314. [Google Scholar] [CrossRef]
- Feng, L.; Han, X.; Hu, C.; Chen, X. Four decades of wetland changes of the largest freshwater lake in China: Possible linkage to the three gorges dam? Remote Sens. Environ. 2016, 176, 43–55. [Google Scholar] [CrossRef]
- Wang, H.; Ma, M. A review of monitoring change in lake water areas based on remote sensing. Remote Sens. Technol. Appl. 2009, 24, 674–684. [Google Scholar]
- Hereher, M.E. Environmental monitoring and change assessment of Tosha lakes in southern Egypt using remote sensing. Environ. Earth Sci. 2015, 73, 3623–3632. [Google Scholar] [CrossRef]
- Giardino, C.; Bresciani, M.; Stroppiana, D.; Oggioni, A.; Morabito, G. Optical remote sensing of lakes: An overview on Lake Maggiore. J. Limnol. 2014, 73, 201–214. [Google Scholar] [CrossRef] [Green Version]
- Veettil, B.K.; Bianchini, N.; Andrade, A.M.; Bremer, U.F.; Simoes, J.C.; Souza, E. Glacier changes and related glacial lake expansion in the Bhutan Himalaya, 1990–2010. Reg. Environ. Chang. 2015, 16, 1267–1278. [Google Scholar] [CrossRef]
- Heine, I.; Francke, T.; Rogass, C.; Medeiros, P.H.A.; Bronstert, A.; Foerster, S. Monitoring seasonal changes in the water surface areas of reservoirs using TerraSAR-X time series data in Semiarid Northeastern Brazil. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2014, 7, 3190–3199. [Google Scholar] [CrossRef]
- Bériaux, E.; Waldner, F.; Collienne, F.; Bogaert, P.; Defourny, P. Maize leaf area index retrieval from synthetic quad Pol-SAR time series using the water cloud model. Remote Sens. 2015, 7, 16204–16225. [Google Scholar] [CrossRef] [Green Version]
- Ogilvie, A. Decadal monitoring of the Niger inner delta flood dynamics using MODIS optical data. J. Hydrol. 2015, 523, 368–383. [Google Scholar] [CrossRef] [Green Version]
- Tulbure, M.; Broich, G.M.; Stehman, S.V.; Kommareddy, A. Surface water extent dynamics from three decades of seasonally continuous Landsat time series at subcontinental scale in a semi-arid region. Remote Sens. Environ. 2016, 178, 142–157. [Google Scholar] [CrossRef]
- Wang, Y.; Sun, G.; Liao, M.; Gong, J. Using MODIS images to examine the surface extents and variations derived from the dem and laser altimeter data in the Danjiangkou reservoir, China. Int. J. Remote Sens. 2008, 29, 293–311. [Google Scholar] [CrossRef]
- Li, W.; Qin, Y.; Sun, Y. Estimating the relationship between dam water level and surface water area for the Danjiangkou reservoir using landsat remote sensing images. Remote Sens. Lett. 2016, 7, 121–130. [Google Scholar] [CrossRef]
- Tao, S.L. Rapid loss of lakes on the Mongolian plateau. Proc. Nat. Acad. Sci. USA 2015, 112, 2281–2286. [Google Scholar] [CrossRef] [Green Version]
- Niu, S.L.; Guo, Z.W.; Li, N. Research progress and trend analysis of water extraction by spaceborne SAR. J. Liaocheng Univ. (Nat. Sci. Ed.) 2018, 31, 72–86. [Google Scholar]
- Hui, J.; Yao, L. Analysis and inversion of the nutritional status of China’s Poyang Lake using MODIS data. J. Indian Soc. Remote Sens. 2016, 44, 837–842. [Google Scholar] [CrossRef]
- Tang, X.G. Changing land use and its impact on the habitat suitability for wintering anseriformes in China’s Poyang lake region. Sci. Total Environ. 2016, 108, 296–306. [Google Scholar] [CrossRef]
- Tian, H.; Li, W.; Wu, M.; Huang, N.; Li, G.; Li, X. Dynamic monitoring of the largest freshwater lake in China using a new water index derived from high spatiotemporal resolution sentinel-1a data. Remote Sens. 2017, 9, 521–538. [Google Scholar] [CrossRef] [Green Version]
- Cazals, C. Mapping and characterization of hydrological dynamics in a coastal marsh using high temporal resolution Sentinel-1A images. Remote Sens. 2016, 8, 570–585. [Google Scholar] [CrossRef] [Green Version]
- Tian, Y.; Chen, X.; Luo, P.; Xu, Y. Beijiang water body information extraction based on ENVISAT-ASAR. In Proceedings of the IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, Shanghai, China, 1–6 June 2012; pp. 273–277. [Google Scholar]
- Zhang, L.; Zhang, Y.; Wang, M.; Li, Y. Adaptive river segmentation in SAR images. J. Electron. 2009, 26, 438–442. [Google Scholar] [CrossRef]
- Li, N.; Wang, R.; Deng, Y.; Chen, J.; Liu, Y.; Du, K. Waterline mapping and change detection of Tangjiashan dammed lake after Wenchuan earthquake from multitemporal high-resolution airborne SAR imagery. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2014, 7, 3200–3209. [Google Scholar] [CrossRef]
- Shao, Y.; Wang, S.; Tian, W.; Gong, H.; Zhang, F. Fast extracting and change detection of dammed lakes using high-resolution SAR images: A case study of Tangjiashan dammed lake. In Proceedings of the IEEE IGARSS, Cape Tone, South Africa, 12–17 July 2009; pp. 349–352. [Google Scholar]
- Leng, Y.; Li, N. Improved change detection method for flood monitoring. J. Radars 2017, 6, 204–212. [Google Scholar]
- Cao, S.; Ye, Z.; Xu, D.; Xu, X. A Hadamard product based method for DOA estimation and gain-phase errorcalibration. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1224–1233. [Google Scholar] [CrossRef]
- Leng, Y.; Liu, Z.; Zhang, H.; Yu, W.; Li, N. Improved ACM algorithm for Poyang lake monitoring. J. Electron. Inf. Technol. 2017, 39, 1064–1070. [Google Scholar]
- Sheng, G.; Yang, W.; Deng, X.; He, C.; Cao, Y.; Sun, H. Coastline detection in synthetic aperture radar (SAR) images by integrating watershed transformation and controllable Gradient Vector Flow (GVF) snake model. IEEE J. Ocean. Eng. 2012, 37, 375–383. [Google Scholar] [CrossRef]
- Gan, D.; Soon, Y.T. A multifractal approach for auto-segmentation of SAR images. In Proceedings of the IEEE IGARSS 2020, Sydney, Australia, 9–13 July 2001; pp. 2301–2303. [Google Scholar]
- Relan, D.; Khatter, K. Effectiveness of Multi-fractal Analysis in Differentiating Subgroups of Retinal Images. In Proceedings of the IEEE 17th India Council International Conference, Delhi, India, 11–13 December 2020; pp. 1–7. [Google Scholar]
- Smitha, B.; Joseph, K.P. Analysis of Carotid Plaque Using Multifractal method in Ultrasound Images. In Proceedings of the IEEE Engineering in Medicine and Biology Society, Berlin, Germany, 23–27 July 2019; pp. 943–946. [Google Scholar]
- Aleksandrowicz, S.; Wawrzaszek, A.; Drzewiecki, W.; Krupinski, M.; Jenerowicz, M. Change Detection in Multispectral VHR Images Using Spatialized Hölder Exponent. IEEE Geosci. Remote Sens. Lett. 2021, 1–5. [Google Scholar] [CrossRef]
- Zhu, L.; Xiong, G.; Guo, D.; Yu, W. Ship target detection and segmentation method based on multi-fractal analysis. J. Eng. 2019, 4, 7876–7879. [Google Scholar] [CrossRef]
- Shen, G.; Fu, W. Water Body Extraction using GF-3 Polsar Data—A Case Study in Poyang Lake. In Proceedings of the IEEE IGARSS 2020, Waikoloa, HI, USA, 19–24 July 2020; pp. 4762–4765. [Google Scholar]
- Bi, H.; Xu, L.; Cao, X.; Xue, Y.; Xu, Z. Polarimetric SAR Image Semantic Segmentation With 3D Discrete Wavelet Transform and Markov Random Field. IEEE Trans. Image Process. 2020, 29, 6601–6614. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SAR Image | Area | Image Size (Pixel) | Polar | Date |
|---|---|---|---|---|
| A | Poyang | 6152 × 6182 | HH | 6 May 2017 |
| B | Dongting | 5000 × 5373 | VV | 27 June 2017 |
| C | Taihu | 5000 × 8618 | HH | 17 July 2017 |
| SAR Image | Method | F1 Score | FAR (%) | ENL |
|---|---|---|---|---|
| A | Proposed | 0.9923 | 0.31 | 4.28 |
| FCM | 0.8847 | 6.86 | 2.82 | |
| GAC | 0.9010 | 1.97 | 2.75 | |
| MRF | 0.8655 | 4.59 | 2.52 | |
| B | Proposed | 0.9912 | 1.01 | 4.55 |
| FCM | 0.8825 | 13.87 | 3.37 | |
| GAC | 0.8513 | 16.32 | 2.50 | |
| MRF | 0.8463 | 15.09 | 2.26 | |
| C | Proposed | 0.9854 | 2.87 | 8.05 |
| FCM | 0.8068 | 19.97 | 5.38 | |
| GAC | 0.7865 | 19.61 | 4.06 | |
| MRF | 0.51 | 29.99 | 4.97 |
| Date | Perimeter/km | Perimeter Change Rate/% | Area/km2 | Area Change Rate/% | Coastline Coefficient |
|---|---|---|---|---|---|
| 11 May 2017 | 1219.4 | 0.0 | 1599.7 | 0.0 | 8.6 |
| 30 July 2017 | 911.7 | −25.2 | 1692.5 | 5.8 | 6.3 |
| 1 August 2017 | 1068.3 | −12.4 | 1588.4 | −0.7 | 7.6 |
| 12 September 2017 | 1004.0 | −17.7 | 1690.9 | 5.7 | 6.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, W.; Dai, Z.; Gu, H.; Zhu, X. Water Extraction Method Based on Multi-Texture Feature Fusion of Synthetic Aperture Radar Images. Sensors 2021, 21, 4945. https://doi.org/10.3390/s21144945
Zhu W, Dai Z, Gu H, Zhu X. Water Extraction Method Based on Multi-Texture Feature Fusion of Synthetic Aperture Radar Images. Sensors. 2021; 21(14):4945. https://doi.org/10.3390/s21144945
Chicago/Turabian StyleZhu, Wenbin, Zheng Dai, Hong Gu, and Xiaochun Zhu. 2021. "Water Extraction Method Based on Multi-Texture Feature Fusion of Synthetic Aperture Radar Images" Sensors 21, no. 14: 4945. https://doi.org/10.3390/s21144945
APA StyleZhu, W., Dai, Z., Gu, H., & Zhu, X. (2021). Water Extraction Method Based on Multi-Texture Feature Fusion of Synthetic Aperture Radar Images. Sensors, 21(14), 4945. https://doi.org/10.3390/s21144945