
FORESAM—FOG Paradigm-Based Resource Allocation Mechanism for Vehicular Clouds

 ,
,  , and
, and 
Abstract
:1. Introduction
- (i)
- The development of a FOG-based mechanism for the allocation and aggregation of vehicular cloud resources;
- (ii)
- The development and evaluation of a decision-making policy for the allocation of resources based on the resources required for the proper execution of the requested service; and
- (iii)
- FORESAM validation through real mobility trades, aiming to bring more realistic results.
2. Related Works
3. FORESAM—FOG Paradigm-Based Resource Allocation Mechanism for Vehicular Clouds
3.1. Communication Protocol
| Algorithm 1: Communication FOG and Vehicles |
1:
2:
3:
4: if () then 5:
6:
7: end if 8:
|
| Algorithm 2:Communication Among FOGs |
1:
2: if () then 3:
4: end if 5: if () then 6:
7: end if |
3.2. Resource Allocation and Management
4. Performance Analysis
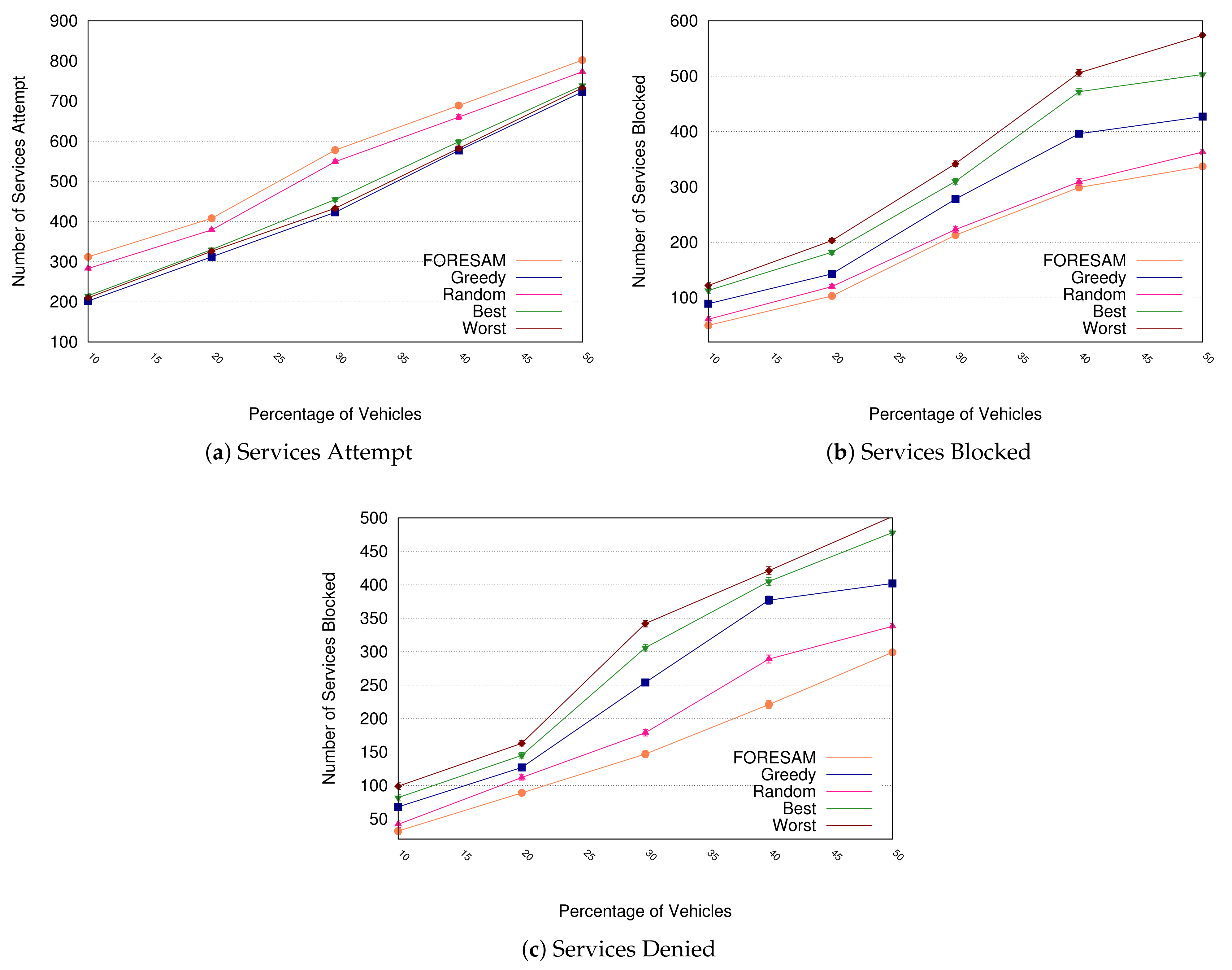
4.1. Evaluation of Allocation Mechanism of Resource Allocation in the Vehicular Cloud
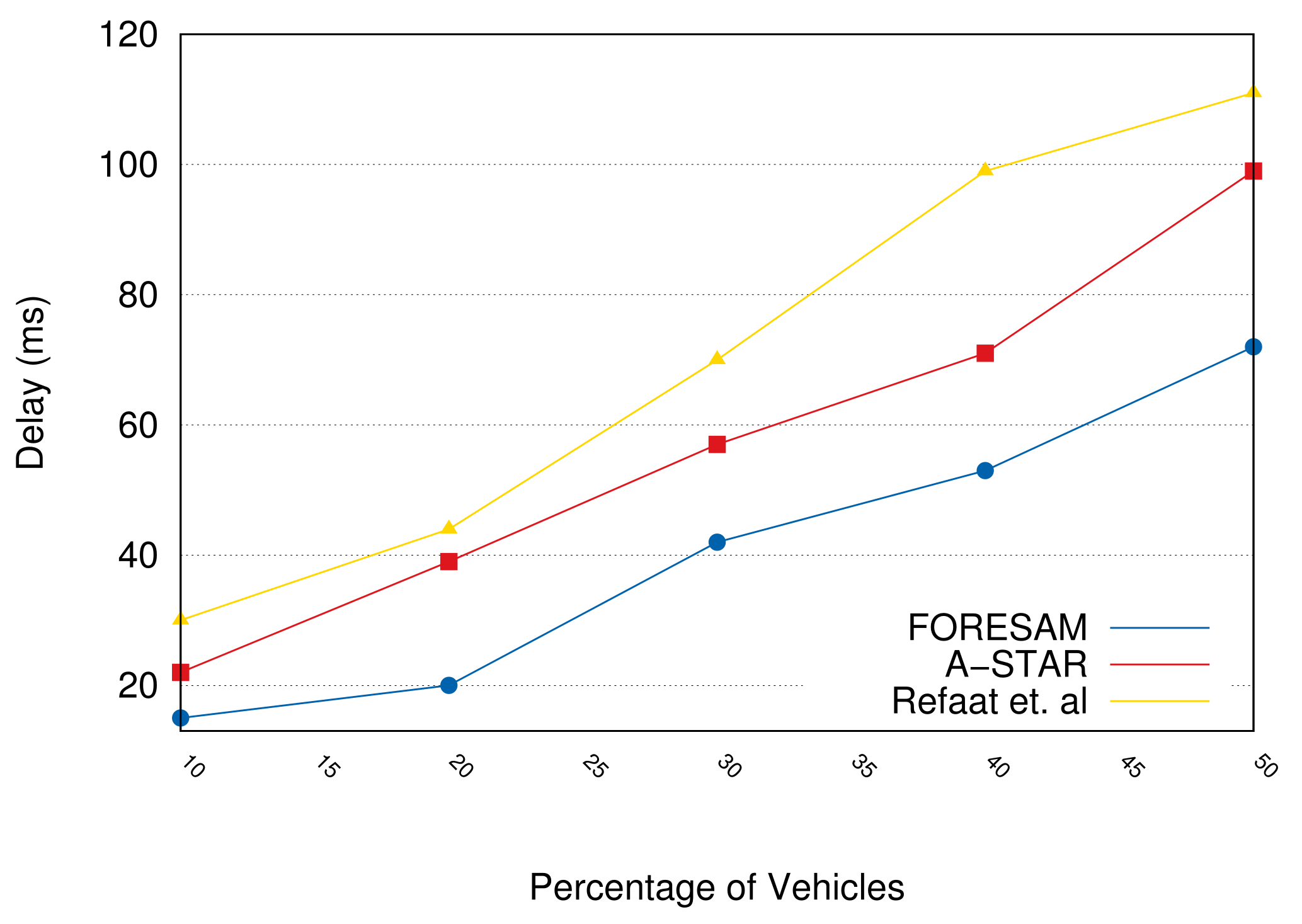
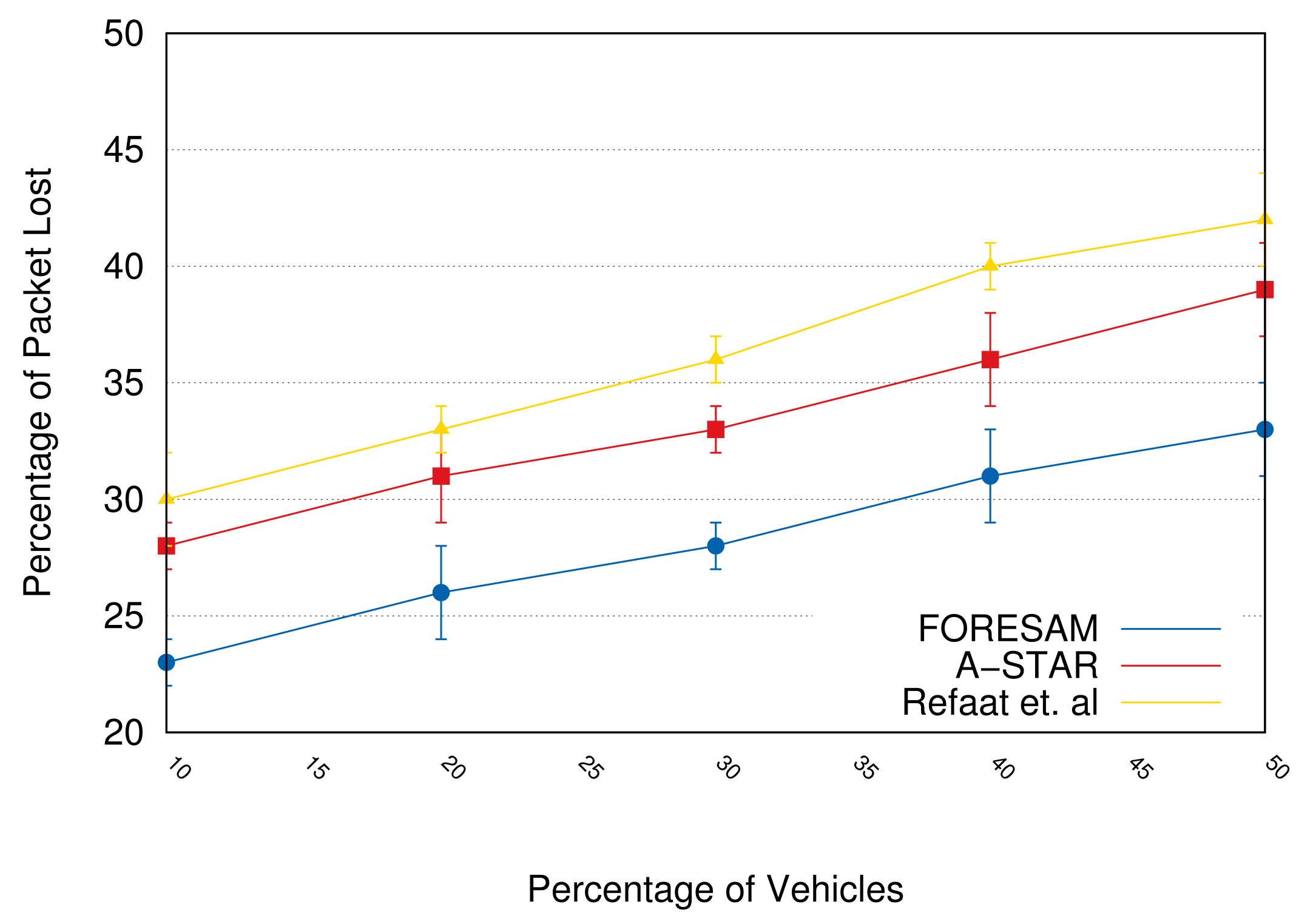
4.2. Evaluation of Communication among Elements of FORESAM
5. Conclusion and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Boukerche, A.; Meneguette, R.I. Vehicular Cloud network: A new challenge for resource management based systems. In Proceedings of the 2017 13th International Wireless Communications and Mobile Computing Conference (IWCMC), Valencia, Spain, 26–30 June 2017; pp. 159–164. [Google Scholar] [CrossRef]
- Pappalardo, G.; Cafiso, S.; Di Graziano, A.; Severino, A. Decision tree method to analyze the performance of lane support systems. Sustainability 2021, 13, 846. [Google Scholar] [CrossRef]
- Trivedi, H.; Tanwar, S.; Thakkar, P. Software Defined Network-Based Vehicular Adhoc Networks for Intelligent Transportation System: Recent Advances and Future Challenges. In Futuristic Trends in Network and Communication Technologies; Singh, P.K., Paprzycki, M., Bhargava, B., Chhabra, J.K., Kaushal, N.C., Kumar, Y., Eds.; Springer: Singapore, 2019; pp. 325–337. [Google Scholar]
- Benevolo, C.; Dameri, R.P.; D’auria, B. Smart mobility in smart city. In Empowering Organizations; Springer: Berlin/Heidelberg, Germany, 2016; pp. 13–28. [Google Scholar]
- Trubia, S.; Severino, A.; Curto, S.; Arena, F.; Pau, G. Smart roads: An overview of what future mobility will look like. Infrastructures 2020, 5, 107. [Google Scholar] [CrossRef]
- Meneguette, R.I.; Boukerche, A. Peer-to-Peer Protocol for Allocated Resources in Vehicular Cloud Based on V2V Communication. In Proceedings of the 2017 IEEE Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, 19–22 March 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Meneguette, R.; Fillho, G.; Bittencourt, L.; Ueyama, J.; Villas, L. A Solution for Detection and Control For Congested Roads Using Vehicular Networks. IEEE Lat. Am. Trans. 2016, 14, 1849–1855. [Google Scholar] [CrossRef]
- Javed, M.A.; Zeadally, S.; Hamida, E.B. Data analytics for Cooperative Intelligent Transport Systems. Veh. Commun. 2019, 15, 63–72. [Google Scholar] [CrossRef]
- Dalarmelina, N.d.V.; Teixeira, M.A.; Meneguette, R.I. A Real-Time Automatic Plate Recognition System Based on Optical Character Recognition and Wireless Sensor Networks for ITS. Sensors 2020, 20, 55. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Meneguette, R.I.; Boukerche, A. Vehicular Clouds Leveraging Mobile Urban Computing Through Resource Discovery. IEEE Trans. Intell. Transp. Syst. 2019, 1–8. [Google Scholar] [CrossRef]
- Lyons, G. Getting smart about urban mobility–aligning the paradigms of smart and sustainable. Transp. Res. Part A Policy Pract. 2018, 115, 4–14. [Google Scholar] [CrossRef]
- Silva, B.N.; Khan, M.; Han, K. Towards sustainable smart cities: A review of trends, architectures, components, and open challenges in smart cities. Sustain. Cities Soc. 2018, 38, 697–713. [Google Scholar] [CrossRef]
- Khan, A.A.; Abolhasan, M.; Ni, W. 5G next generation VANETs using SDN and fog computing framework. In Proceedings of the 2018 15th IEEE Annual Consumer Communications Networking Conference (CCNC), Las Vegas, NV, USA, 12–15 January 2018; pp. 1–6. [Google Scholar]
- Bureau of Transportation Statistics. Transportation Statistics Annual Report; Bureau of Transportation Statistics, US Department of Transportation: Washington, DC, USA, 2016. [Google Scholar]
- Wasicek, A.; Lee, E.A.; Kim, H.; Greenberg, L.; Iwai, A.; Akkaya, I. System simulation from operational data. In Proceedings of the 2015 52nd ACM/EDAC/IEEE Design Automation Conference (DAC), San Francisco, CA, USA, 8–12 June 2015; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Meneguette, R.I.; Boukerche, A. SERVitES: An efficient search and allocation resource protocol based on V2V communication for vehicular cloud. Comput. Netw. 2017, 123, 104–118. [Google Scholar] [CrossRef]
- Darwish, T.S.J.; Abu Bakar, K. Fog Based Intelligent Transportation Big Data Analytics in The Internet of Vehicles Environment: Motivations, Architecture, Challenges, and Critical Issues. IEEE Access 2018, 6, 15679–15701. [Google Scholar] [CrossRef]
- Gai, K.; Qiu, M.; Zhao, H.; Tao, L.; Zong, Z. Dynamic energy-aware cloudlet-based mobile cloud computing model for green computing. J. Netw. Comput. Appl. 2016, 59, 46–54. [Google Scholar] [CrossRef]
- Liu, J.; Li, J.; Zhang, L.; Dai, F.; Zhang, Y.; Meng, X.; Shen, J. Secure intelligent traffic light control using fog computing. Future Gener. Comput. Syst. 2018, 78, 817–824. [Google Scholar] [CrossRef]
- Wu, Q.; Shen, J.; Yong, B.; Wu, J.; Li, F.; Wang, J.; Zhou, Q. Smart fog based workflow for traffic control networks. Future Gener. Comput. Syst. 2019, 97, 825–835. [Google Scholar] [CrossRef]
- Yu, R.; Zhang, Y.; Gjessing, S.; Xia, W.; Yang, K. Toward cloud-based vehicular networks with efficient resource management. IEEE Netw. 2013, 27, 48–55. [Google Scholar] [CrossRef] [Green Version]
- Pereira, R.S.; Lieira, D.D.; da Silva, M.A.; Pimenta, A.H.; da Costa, J.B.; Rosário, D.; Villas, L.; Meneguette, R.I. RELIABLE: Resource Allocation Mechanism for 5G Network using Mobile Edge Computing. Sensors 2020, 20, 5449. [Google Scholar] [CrossRef] [PubMed]
- Meneguette, R.; Boukerche, A.; Pimenta, A.; Meneguette, M. A Resource Allocation scheme based on Semi-Markov Decision Process for Dynamic Vehicular Clouds. In Proceedings of the IEEE ICC 2017 Mobile and Wireless Networking, Paris, France, 21–25 May 2017. [Google Scholar]
- Tao, J.; Zhang, Z.; Feng, F.; He, J.; Xu, Y. Non-cooperative Resource Allocation Scheme for Data Access in VANET Cloud Environment. In Proceedings of the 2015 Third International Conference on Advanced Cloud and Big Data, Yangzhou, China, 30 October–1 November 2015; pp. 190–196. [Google Scholar]
- Zheng, K.; Meng, H.; Chatzimisios, P.; Lei, L.; Shen, X. An SMDP-Based Resource Allocation in Vehicular Cloud Computing Systems. IEEE Trans. Ind. Electron. 2015, 62, 7920–7928. [Google Scholar] [CrossRef]
- Meng, H.; Zheng, K.; Chatzimisios, P.; Zhao, H.; Ma, L. A utility-based resource allocation scheme in cloud-assisted vehicular network architecture. In Proceedings of the 2015 IEEE International Conference on Communication Workshop (ICCW), London, UK, 8–12 June 2015; pp. 1833–1838. [Google Scholar] [CrossRef]
- Arkian, H.R.; Atani, R.E.; Diyanat, A.; Pourkhalili, A. A cluster-based vehicular cloud architecture with learning-based resource management. J. Supercomput. 2015, 71, 1401–1426. [Google Scholar] [CrossRef]
- Dai, P.; Liu, K.; Sha, E.; Zhuge, Q.; Lee, V.; Son, S.H. Vehicle Assisted Data Update for Temporal Information Service in Vehicular Networks. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Las Palmas de Gran Canaria, Spain, 15–18 September 2015; pp. 2545–2550. [Google Scholar]
- Yu, R.; Huang, X.; Kang, J.; Ding, J.; Maharjan, S.; Gjessing, S.; Zhang, Y. Cooperative Resource Management in Cloud-Enabled Vehicular Networks. IEEE Trans. Ind. Electron. 2015, 62, 7938–7951. [Google Scholar] [CrossRef]
- Pyun, S.Y.; Lee, W.; Cho, D.H. Resource Allocation for Vehicle-to-Infrastructure Communication Using Directional Transmission. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1183–1188. [Google Scholar] [CrossRef]
- Miao, Z.; Li, C.; Zhu, L.; Han, X.; Wang, M.; Cai, X.; Liu, Z.; Xiong, L. On Resource Management in Vehicular Ad Hoc Networks: A Fuzzy Optimization Scheme. In Proceedings of the 2016 IEEE 83rd Vehicular Technology Conference (VTC Spring), Nanjing, China, 15–18 May 2016; pp. 1–5. [Google Scholar]
- Pereira, R.S.; Lieira, D.D.; da Silva, M.A.C.; Pimenta, A.H.M.; da Costa, J.B.D.; Rosário, D.; Meneguette, R.I. A novel fog-based resource allocation policy for vehicular clouds in the highway environment. In Proceedings of the 2019 IEEE Latin-American Conference on Communications (LATINCOM), Hotel Mercure, Salvador, 1–13 November 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Refaat, T.K.; Kantarci, B.; Mouftah, H.T. Virtual machine migration and management for vehicular clouds. Veh. Commun. 2016, 4, 47–56. [Google Scholar] [CrossRef]
- Kumar, N.; Zeadally, S.; Chilamkurti, N.; Vinel, A. Performance analysis of Bayesian coalition game-based energy-aware virtual machine migration in vehicular mobile cloud. IEEE Netw. 2015, 29, 62–69. [Google Scholar] [CrossRef]
- Yu, R.; Zhang, Y.; Wu, H.; Chatzimisios, P.; Xie, S. Virtual machine live migration for pervasive services in cloud-assisted vehicular networks. In Proceedings of the 2013 8th International Conference on Communications and Networking in China (CHINACOM), Guilin, China, 14–16 August 2013; pp. 540–545. [Google Scholar]
- Da Costa, J.B.D.; Meneguette, R.I.; Rosário, D.; Villas, L.A. Combinatorial Optimization-based Task Allocation Mechanism for Vehicular Clouds. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Hattab, G.; Ucar, S.; Higuchi, T.; Altintas, O.; Dressler, F.; Cabric, D. Optimized Assignment of Computational Tasks in Vehicular Micro Clouds. In Proceedings of the 2nd International Workshop on Edge Systems, Analytics and Networking (EdgeSys 2019), Dresden, Germany, NY, USA, 25 March 2019; ACM: New York; pp. 1–6. [Google Scholar]
- Tang, C.; Zhu, C.; Wei, X.; Wu, H.; Li, Q.; Rodrigues, J.J. Intelligent Resource Allocation for Utility Optimization in RSU-Empowered Vehicular Network. IEEE Access 2020, 8, 94453–94462. [Google Scholar] [CrossRef]
- Garg, A.; Pandey, K.; Singh, B. Hierarchical map-based location service for VANETs in urban environments. In Proceedings of the 2014 Seventh International Conference on Contemporary Computing (IC3), Noida, India, 7–9 August 2014; pp. 199–205. [Google Scholar] [CrossRef]
- Ashok, D.M.; Pai, M.M.M.; Mouzna, J. Efficient map based location service for VANETs. In Proceedings of the 2011 11th International Conference on ITS Telecommunications (ITST), St. Petersburg, Russia, 23–25 August 2011; pp. 387–392. [Google Scholar] [CrossRef]
- Fulcher, J. Computational intelligence: An introduction. In Computational Intelligence: A Compendium; Springer: Berlin/Heidelberg, Germany, 2008; pp. 3–78. [Google Scholar]
- Jaiswal, N.K. The Analytic Hierarchy Process. In Military Operations Research: Quantitative Decision Making; Springer: Boston, MA, USA, 1997; pp. 209–232. [Google Scholar] [CrossRef]
- Henderson, T.R.; Lacage, M.; Riley, G.F.; Dowell, C.; Kopena, J. Network simulations with the ns-3 simulator. SIGCOMM Demonstr. 2008, 14, 527. [Google Scholar]
- SUMO. SUMO—Simulation of Urban MObility. Available online: http://sumo.sourceforge.net/ (accessed on 6 June 2021).
- Sommer, C.; Joerer, S.; Dressler, F. On the Applicability of Two-Ray Path Loss Models for Vehicular Network Simulation. In Proceedings of the IEEE Vehicular Networking Conference (VNC), Seoul, Korea, 14–16 November 2012; pp. 64–69. [Google Scholar]
- Seet, B.C.; Liu, G.; Lee, B.S.; Foh, C.H.; Wong, K.J.; Lee, K.K. A-STAR: A Mobile Ad Hoc Routing Strategy for Metropolis Vehicular Communications. In Networking 2004; Mitrou, N., Kontovasilis, K., Rouskas, G.N., Iliadis, I., Merakos, L., Eds.; Springer: Berlin/Heidelberg, Germany, 2004; pp. 989–999. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Works | Res. Allocation | Service | Mode | Elements | Allocation Method | |
|---|---|---|---|---|---|---|
| Roadside | Vehicle | Dif. Service | ||||
| Garg et al. [39] | X | Decentralized | Vehicles | Optimization | ||
| Meneguette et al. [23] | X | Decentralized | Vehicles | SMDP | ||
| Hattab et al. [37] | X | Centralized | Vehicles | Querry | ||
| Da Costa et al. [36] | X | Centralized | Vehicles | Heuristic | ||
| Tao et al. [24] | X | Centralized | RSU | Optimization | ||
| Yu et al. [21] | X | Centralized | RSU | Optimization | ||
| Tang et al. [38] | X | Centralized | RSU | Heuristic | ||
| FORESAM | X | X | X | Hibridy | FOGs and Vehicles | AHP |
| Factor | Service Time | Storage | Processing |
|---|---|---|---|
| Service Time | 1 | 2 | 3 |
| Storage | 1/2 | 1 | 3 |
| Processing | 1/3 | 1/3 | 1 |
| Parameter | Value |
|---|---|
| Communication RSU | 5G |
| Transmission power | 2.2 mW |
| Transmission range | 300 m |
| Bit rate | 18 Mbit/s |
| Beacons time | 0. 5 s |
| Runs | 35 |
| Confidence Interval | 95% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pereira, R.; Boukerche, A.; da Silva, M.A.C.; Nakamura, L.H.V.; Freitas, H.; Rocha Filho, G.; Meneguette, R.I. FORESAM—FOG Paradigm-Based Resource Allocation Mechanism for Vehicular Clouds. Sensors 2021, 21, 5028. https://doi.org/10.3390/s21155028
Pereira R, Boukerche A, da Silva MAC, Nakamura LHV, Freitas H, Rocha Filho G, Meneguette RI. FORESAM—FOG Paradigm-Based Resource Allocation Mechanism for Vehicular Clouds. Sensors. 2021; 21(15):5028. https://doi.org/10.3390/s21155028
Chicago/Turabian StylePereira, Rickson, Azzedine Boukerche, Marco A. C. da Silva, Luis H. V. Nakamura, Heitor Freitas, Geraldo P. Rocha Filho, and Rodolfo I. Meneguette. 2021. "FORESAM—FOG Paradigm-Based Resource Allocation Mechanism for Vehicular Clouds" Sensors 21, no. 15: 5028. https://doi.org/10.3390/s21155028
APA StylePereira, R., Boukerche, A., da Silva, M. A. C., Nakamura, L. H. V., Freitas, H., Rocha Filho, G., & Meneguette, R. I. (2021). FORESAM—FOG Paradigm-Based Resource Allocation Mechanism for Vehicular Clouds. Sensors, 21(15), 5028. https://doi.org/10.3390/s21155028