
Wireless Geophone Networks for Land Seismic Data Acquisition: A Survey, Tutorial and Performance Evaluation


Abstract
:1. Introduction
2. Overview of Land Seismic Survey
2.1. Survey Equipments
2.1.1. Energy Source
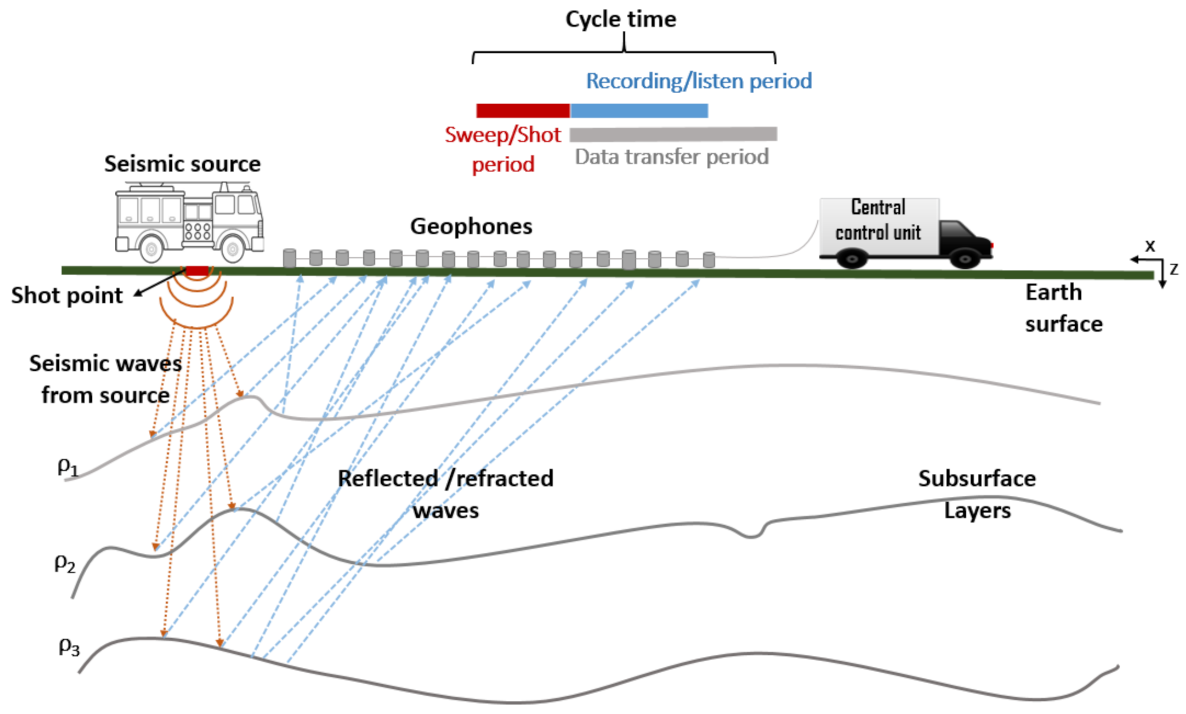
- Impulsive: Explosives such as dynamite or ammonium nitrate are stuffed at the bottom of drilled holes on the survey field prior to the commencement of the data acquisition. The instrument operator starts a sequence of events that causes the explosives to detonate. Energy produced by the explosive is transmitted as a seismic wave signal that radiates outward in all directions via the earth subsurface, and reflections are recorded at the receivers on the surface [17].
- Vibratory: Vibrators (vibroseis) are the most commonly used sources in land seismic exploration [18] due to some advantages it has over impulsive sources, such as limited frequency band, low-power source, longer energy emission time [19], less safety concerns, as well as better control of sweep repetition. A vibrator is a vehicle-mounted energy source that converts an electrical signal into high-pressure hydraulic flow to vibrate and control a heavy base plate held in contact with the ground by the weight of the vibrator vehicle and isolated by an air-bag suspension [19]. A reference sweep signal encoded in the vibrator electronics is sent into the ground through the vibrator plates for a given period of time known as the “sweep or shot time”. Geophones at the surface records the data or seismic reflections for a duration called the listen time [20]. The period from the completion of the sweep to the end of recording is the listen time. The vibrator truck lifts the plates and then moves to the next shot point in the survey area. The procedure is repeated throughout the survey area. Vibrators have a typical signal frequency range of 5–511 and a sweep length of up to 31 [17]. One major drawback of vibrators is that they cannot be used in complex terrains, such as mountainous or marshy areas, or in jungles.
2.1.2. Seismic Sensor
2.2. Real Time vs. Blind Data Acquisition
3. Wireless Seismic Data Acquisition (WSDA)
3.1. Network Coverage/Deployment
3.2. Network Throughput
3.3. Latency, Localization, and Synchronization
3.4. Channel Access
4. WSDA: State of the Art
- Blind recorders are often an autonomous, battery-powered with no or extremely limited radio connectivity acquisition unit which has no means of collecting data during acquisition. Data are obtained days after the survey begins by transporting the units to the CCU and downloading their data. Timing synchronization is achieved via GPS in such units.
- Quality control capable wireless systems enable the collection of QC data and some seismic data by survey crew during data acquisition wirelessly. In such systems, no communication channel to the CCU is present for neither seismic data nor QC data, as such requires survey personnel to travel across the spread to collect data manually.
- Remote quality control wireless systems provide means of transferring operation QC data only in near real-time via a low-speed radio channel from the geophones to the CCU in the form of dynamic autonomous mesh network. Survey crews moving across the survey field can collect seismic data. Units in such systems monitor and transmit QC data as well as ambient field noise level as soon as it is detected to be out of the tolerance condition. The data rate for QC data commonly ranges from 1 to 10 B/min [9], which is of significantly lower magnitude as compared to the seismic data.
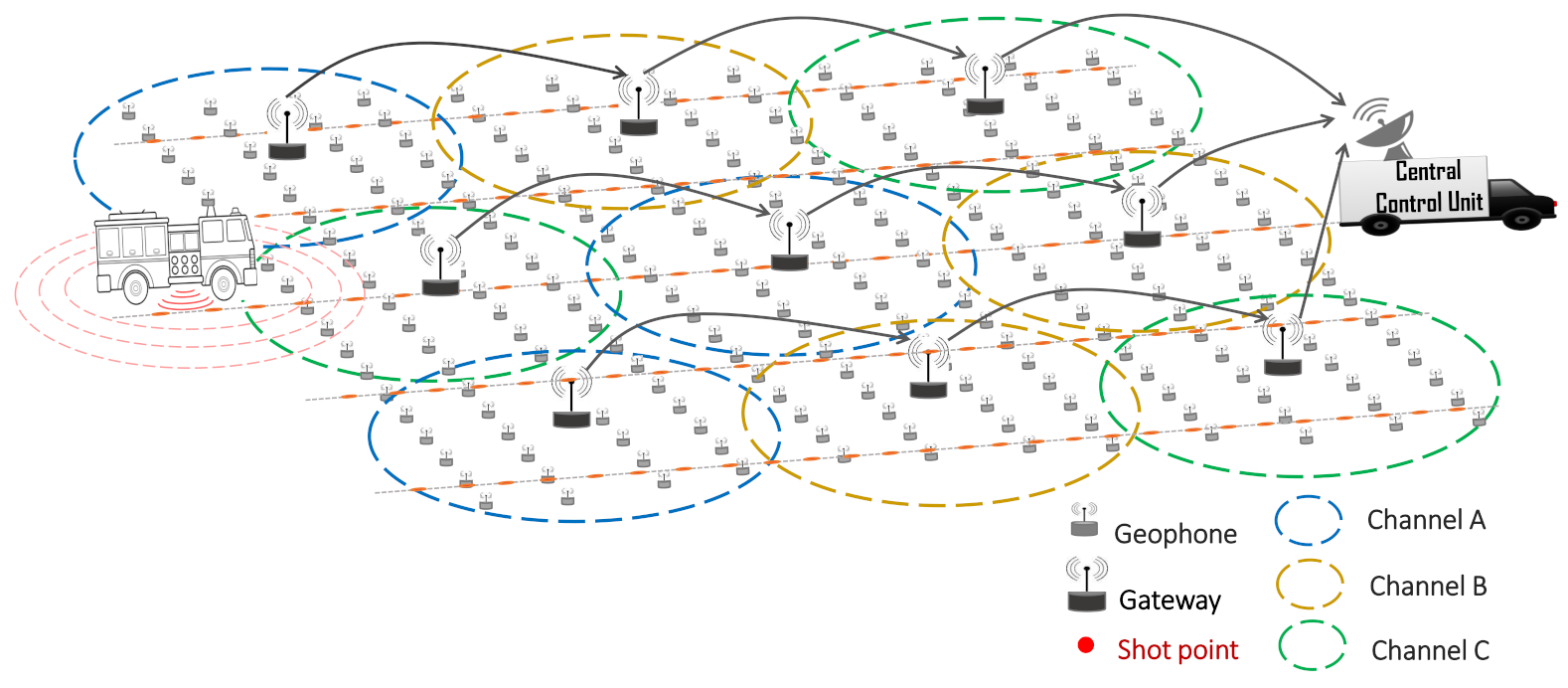
- Real-time nodal units transmit both seismic and QC data to the CCU directly in real-time or with minimal latency during operation. This enables contractors to monitor the quality of data acquired for a particular shooting phase before moving to the next. Such systems are similar to cable-based systems in operation and use dedicated radio links and infrastructure in their operation. Such systems use a predefine carefully planned network architecture or topology to relay a huge amount of acquired seismic data and QC data via some form of multi-hops between nodes to the CCU.
4.1. Review of Recent Advancement in Wireless Seismic Data Acquisition
4.2. Technologies for Wireless Geophone Networks
4.3. Network Architecture
5. Proposed Network Architecture/Acquisition Technique
5.1. Scenario
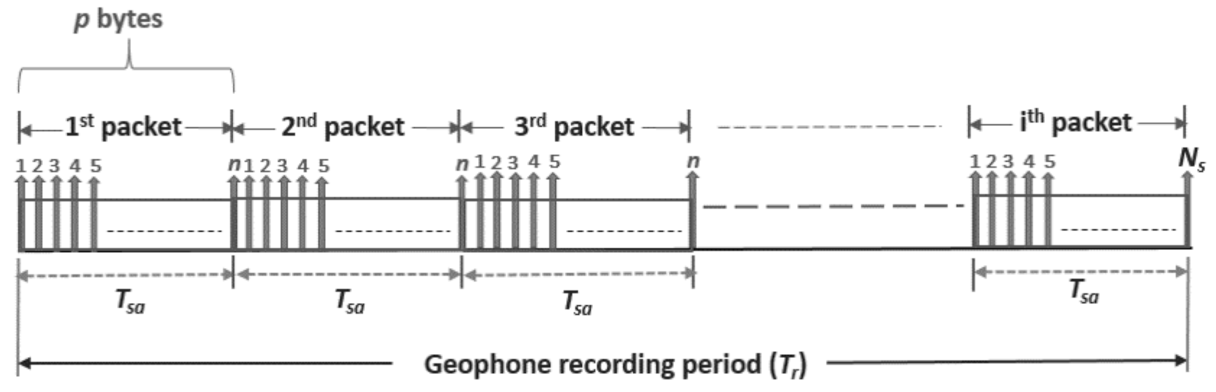
5.2. Geophone Data Traffic Generation
5.3. Wireless Technology
6. Performance Analysis
6.1. Performance Metrics
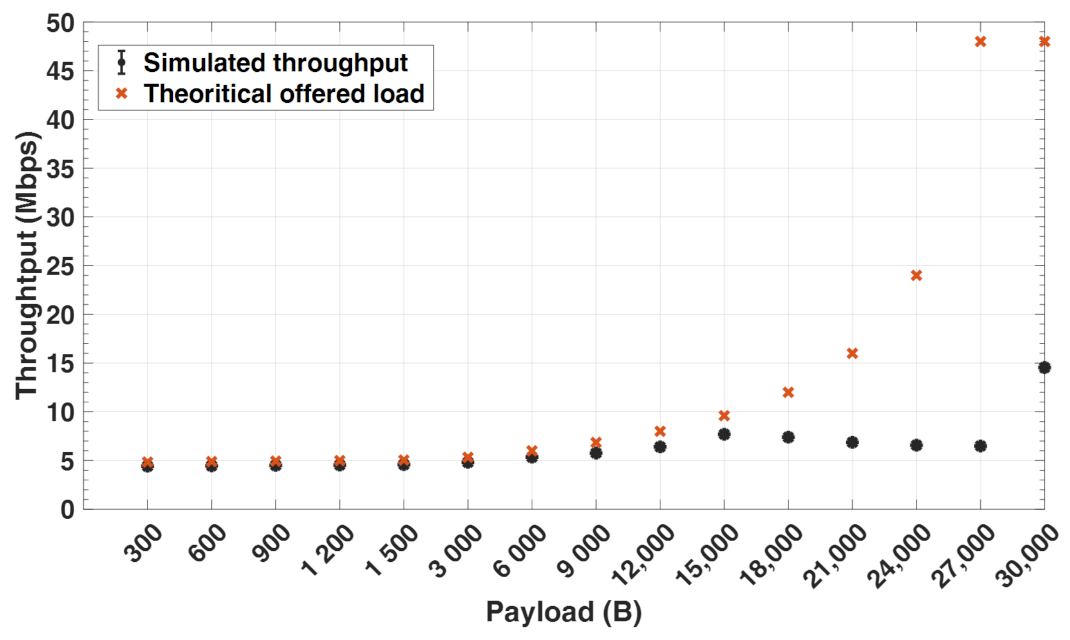
6.1.1. Throughput
6.1.2. Average End-to-End Delay
6.1.3. Packet Loss Due to Retransmission Failure Ratio
6.1.4. Retransmission Ratio
6.2. Simulation
6.3. Simulation Results
7. Discussions
8. Conclusions
Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CCU | Central Control Unit |
| WSDA | Wireless Seismic Data Acquisition |
| WGN | Wireless Geophone Network |
| ADC | Analogue to Digital Converter |
| MTU | Maximum Transmission Unit |
References
- Droznin, D.; Shapiro, N.; Droznina, S.Y.; Senyukov, S.; Chebrov, V.; Gordeev, E. Detecting and locating volcanic tremors on the Klyuchevskoy group of volcanoes (Kamchatka) based on correlations of continuous seismic records. Geophys. J. Int 2015, 203, 1001–1010. [Google Scholar] [CrossRef]
- Hiroo, K. Earthquake Early Warning Systems. In Earthquake Early Warning Systems; Gasparini, P., Manfredi, G., Zschau, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 1–7. [Google Scholar]
- Fleming, K.; Picozzi, M.; Milkereit, C.; Kühnlenz, F.; Lichtblau, B.; Fischer, J.; Zulfikar, C.; Özel, O.; The SAFER and EDIM working groups. The Self-organizing Seismic Early Warning Information Network (SOSEWIN). Seismol. Res. Lett. 2009, 80, 755–771. [Google Scholar] [CrossRef]
- Farquharson, C.; Lelievre, P.; Hurich, C. Joint Inversion of Seismic Traveltimes and Gravity Data on 3D Unstructured Grids for Mineral Exploration. In Proceedings of the American Geophysical Union (AGU) Fall Meeting, San Francisco, CA, USA, 13–17 December 2010. NS43A-05. [Google Scholar]
- Anandakrishnan, S.; Bilen, S.; Urbina, J.; Burkett, P. GeoPebbles: A Network of Wireless Seismic and GPS Nodes Designed for Polar Deployment. Presented at the 2013 SEG Annual Meeting, Houston, TX, USA, 22 September 2013; Society of Exploration Geophysicists: Tulsa, OK, USA, 2013; pp. 4547–4549. [Google Scholar]
- Voigt, D.E.; Peters, L.E.; Anandakrishnan, S. ‘Georods’: The development of a four-element geophone for improved seismic imaging of glaciers and ice sheets. Ann. Glaciol. 2013, 54, 142–148. [Google Scholar] [CrossRef]
- Kooper, S.; Elder, K. Wireless Data Acquisition System and Method Using Self-Initializing Wireless Modules. U.S. Patent 9,140,811, 22 September 2015. [Google Scholar]
- Zhong, W.; Dong, E.; Cao, X.; Zhang, D.; Huang, Z.; Xu, J.; Li, G.; Xu, C. Research on the development of heterogeneous network transmission system for seismic exploration wireless data acquisition. In Proceedings of the 2017 International Conference on Information Networking (ICOIN), Da Nang, Vietnam, 11–13 January 2017; pp. 532–536. [Google Scholar] [CrossRef]
- Savazzi, S.; Spagnolini, U.; Goratti, L.; Molteni, D.; Latva-aho, M.; Nicoli, M. Ultra-wide band sensor networks in oil and gas explorations. IEEE Commun. Mag. 2013, 51, 150–160. [Google Scholar] [CrossRef]
- Freed, D. Cable-Free land seismic data acquisition. Geoscience Technology Report. Available online: http://www.nodalseismic.com/uploads/media_items/2_cable-freeseismicdataacquisitionsept2011.original.pdf (accessed on 15 September 2019).
- Freed, D. ‘Cable-Free’ New Mantra In Acquisition. Am. Oil Gas Rep. 2008. Available online: http://nodalseismic.com/uploads/media_items/11_ao-gcablefreejuly2008-pdf.original.pdf (accessed on 21 September 2019).
- Savazzi, S.; Spagnolini, U. Wireless geophone networks for high-density land acquisition: Technologies and future potential. Lead. Edge 2008, 27, 882–886. [Google Scholar] [CrossRef]
- Kirsch, R. (Ed.) Groundwater Geophysics: A Tool for Hydrogeology; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar] [CrossRef]
- Helga, W. Seismic Methods. Available online: https://www.liag-hannover.de/fileadmin/userupload/dokumente/Grundwassersysteme/BURVAL/buch/033-050.pdf (accessed on 9 May 2020).
- Lelièvre, P.G.; Farquharson, C.G.; Hurich, C.A. Joint inversion of seismic traveltimes and gravity data on unstructured grids with application to mineral exploration. Geophysics 2012, 77, K1–K15. [Google Scholar] [CrossRef]
- Evans, B.J. A Handbook for Seismic Data Acquisition in Exploration; Society of Exploration Geophysicists: Tulsa, OK, USA, 1997. [Google Scholar] [CrossRef]
- Gadallah, M.R.; Fisher, R.L. Exploration Geophysics; Springer: Berlin/Heidelberg, Germany, 2009; ISBN 978-3-540-85159-2. [Google Scholar]
- Wei, Z.; Phillips, T.; Hall, M. Fundamental discussions on seismic vibrators. Geophysics 2010, 75, W13–W25. [Google Scholar] [CrossRef]
- Hoover, G.M.; Gallagher, J.G.; Rigdon, H.K. Vibrator signals. Proc. IEEE 1984, 72, 1290–1301. [Google Scholar] [CrossRef]
- Reddy, V.A.; Stuber, G.L.; Al-Dharrab, S.; Mesbah, W.; Muqaibel, A.H. A Wireless Geophone Network Architecture using IEEE 802.11af with Power Saving Schemes. IEEE Trans. Wirel. Commun. 2019, 18, 5967–5982. [Google Scholar] [CrossRef]
- Cooper, H.W.; Cook, R.E. Seismic data gathering. Proc. IEEE 1984, 72, 1266–1275. [Google Scholar] [CrossRef]
- Brodic, B. Three-Component Digital-Based Seismic Landstreamer: Methodologies for Infrastructure Planning Applications. Ph.D. Thesis, Uppsala University Sweden, Uppsala, Sweden, 2018. [Google Scholar] [CrossRef]
- Kunnath, A.T.; Ramesh, M.V. Wireless Geophone Network for remote monitoring and detection of landslides. In Proceedings of the 2011 International Conference on Communications and Signal Processing, Kerala, India, 10–12 February 2011; pp. 122–125. [Google Scholar] [CrossRef]
- Sheltami, T.; Musaddiq, M.; Shakshuki, E. Data Compression Techniques in Wireless Sensor Networks. Future Gener. Comput. Syst. 2016, 64, 151–162. [Google Scholar] [CrossRef] [Green Version]
- Wilcox, S.; Tellier, N. QC Practices in Wireless Land Seismic Acquisition. In Proceedings of the 79th EAGE Conference and Exhibition, Paris, France, 12–15 June 2017; Volume 2017, pp. 1–5. [Google Scholar] [CrossRef]
- Tellier, N.; Wilcox, S. Confidence in data recorded with land seismic recorders. First Break 2018, 36, 53–59. [Google Scholar] [CrossRef]
- Payani, A.; Abdi, A.; Tian, X.; Fekri, F.; Mohandes, M. Advances in Seismic Data Compression via Learning from Data: Compression for Seismic Data Acquisition. IEEE Signal Process. Mag. 2018, 35, 51–61. [Google Scholar] [CrossRef]
- Dean, T.; Tulett, J.; Barnwell, R. Nodal land seismic acquisition: The next generation. First Break 2018, 36, 47–52. [Google Scholar] [CrossRef]
- Savazzi, S.; Spagnolin, U. Synchronous ultra-wide band wireless sensors networks for oil and gas exploration. In Proceedings of the 2009 IEEE Symposium on Computers and Communications, Sousse, Tunisia, 5–8 July 2009; pp. 907–912. [Google Scholar] [CrossRef]
- Reddy, V.A.; Stueber, G.L.; Al-Dharrab, S.I. Energy Efficient Network Architecture for Seismic Data Acquisition via Wireless Geophones. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Vermeer, G.J.O. 3-D Seismic Survey Design; Geophysical References Series; Society of Exploration Geophysicists: Tulsa, OK, USA, 2002; ISBN 1-56080-113-1. [Google Scholar] [CrossRef]
- Onajite, E. Chapter 3—Understanding Seismic Exploration. In Seismic Data Analysis Techniques in Hydrocarbon Exploration; Onajite, E., Ed.; Elsevier: Oxford, UK, 2014; pp. 33–62. [Google Scholar] [CrossRef]
- Anhar, A.; Nilavalan, R.; Ujang, F. A Survey on Medium Access Control (MAC) for Clustering Wireless Sensor Network. In Proceedings of the 2018 2nd International Conference on Electrical Engineering and Informatics (ICon EEI), Batam, Indonesia, 16–17 October 2018; pp. 125–129. [Google Scholar] [CrossRef] [Green Version]
- Shen, H.; Bai, G. Routing in wireless multimedia sensor networks: A survey and challenges ahead. J. Netw. Comput. Appl. 2016, 71, 30–49. [Google Scholar] [CrossRef]
- Zhao, Y.Z.; Miao, C.; Ma, M.; Zhang, J.B.; Leung, C. A survey and projection on medium access control protocols for wireless sensor networks. ACM Comput. Surv. 2012, 45, 7:1–7:37. [Google Scholar] [CrossRef]
- Tavli, B.; Heinzelman, W. (Eds.) Medium access control. In Mobile Ad Hoc Networks; Springer: Dordrecht, The Netherlands, 2006; pp. 31–46. [Google Scholar]
- Savazzi, S.; Goratti, L.; Spagnolini, U.; Latva-aho, M. Short-Range Wireless Sensor Networks for High Density Seismic Monitoring. Available online: https://www.semanticscholar.org/paper/Short-range-wireless-sensor-networks-for-high-Savazzi-Goratti/00ca7e20a8f216b9078950d66d6fa4137dd528fe (accessed on 1 June 2021).
- Tims, H.A.; Cahill, D.R. OPSEIS Seismic Recording System. Available online: https://archives.datapages.com/data/ipa/data/012/012001/345_ipa012a0345.htm (accessed on 1 June 2021).
- Ellis, R. Current cabled and cable-free seismic acquisition systems each have their own advantages and disadvantages—Is it possible to combine the two? First Break 2014, 32, 91–96. [Google Scholar] [CrossRef]
- Lansley, M. Cabled versus cable-less acquisition: Making the best of both worlds in difficult operational environments. First Break 2012, 30, 97–102. [Google Scholar]
- Crice, D. Seismic Surveys without Cables. GEO ExPro. 2011. Available online: https://www.geoexpro.com/articles/2011/10/seismic-surveys-without-cables (accessed on 10 October 2019).
- Reddy, V.A.; Stuber, G.L.; Al-Dharrab, S.I. High-Speed Seismic Data Acquisition Over mm-Wave Channels. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Wireless Seismic, Inc. Launches RT3-Ultra-High Channel Count Seismic Recording System Featuring Next Generation Radio Technology. 2017. Available online: https://wirelessseismic.com/wireless-seismic-inc-launches-rt3-ultra-high-channel-count-seismic-recording-system-featuring-next-generation-radio-technology-2/ (accessed on 10 February 2020).
- Gao, P.; Li, Z.; Li, F.; Li, H.; Yang, Z.; Zhou, W. Design of Distributed Three Component Seismic Data Acquisition System Based on LoRa Wireless Communication Technology. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 10285–10288. [Google Scholar] [CrossRef]
- Jamali-Rad, H.; Campman, X. Internet of Things-based wireless networking for seismic applications: IoT-based wireless networking. Geophys. Prospect. 2018, 66, 833–853. [Google Scholar] [CrossRef]
- DeLisle, J.J. What’s the Difference between IEEE 802.11af and 802.11ah? Microwaves RF 2015, 54, 69–72. [Google Scholar]
- Tian, R.; Wang, L.; Zhou, X.; Xu, H.; Lin, J.; Zhang, L. An Integrated Energy-Efficient Wireless Sensor Node for the Microtremor Survey Method. Sensors 2019, 19, 544. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yin, Z.; Zhou, Y.; Li, Y. Seismic Exploration Wireless Sensor System Based on Wi-Fi and LTE. Sensors 2020, 20, 1018. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Crice, D.B. Systems and Methods for Seismic Data Acquisition. U.S. Patent 9,291,732, 22 March 2016. [Google Scholar]
- IEEE Standard for Information Technology—Telecommunications and Information Exchange Between Systems—Local and Metropolitan Area Networks—Specific Requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications. Available online: https://ieeexplore.ieee.org/document/424837850 (accessed on 1 June 2021).
- OMNeT++ Discrete Event Simulator. Available online: https://omnetpp.org/ (accessed on 22 September 2020).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Operating Mode | Battery Operating Life Time | Storage/Technology Employed | Sampling Interval/ADC Resolution | Manufacturer/Website |
|---|---|---|---|---|---|
| Innoseis Tremornet | Blind | 50 days continuous | Low energy bluetooth | 1, 2, 4 / 24 bit | Innoseis/www.innoseis.com |
| GCL Connectorless recorder | Blind | 60 days @ 24 h/day | 16 or 32 GB storage | 0.25, 0.5, 1, 2, 4 / 24 bit | Geospace Technologies/www.geospace.com |
| DTCC smart solo | Blind | 25 days @ 24 h/day | 8 GB memory | 1, 2, 4 / 24 bit | SmartSolo/www.smartsolo.com |
| GTI NRU 1C | Blind | 23 days @ 24 h/day | 8 GB memory | 0.5, 1, 2, 4 / 24 bit | Geophysical Technology/www.geophysicaltechnology.com |
| Sercel WTU 508 | Real-time QC | 30 days @ 24 h/day | WLAN (a, b, g, n),XT-Pathfinder | 0.5, 1, 2, 4 / 24 bit | Sercel/www.sercel.com |
| RT2 system | Real-time | 25 days @ 12 h/day | WiFi 2.4 GHz ISM band | 0.5, 1, 2, 4 / 24 bit | WirelessSeismic/www.wirelessseismic.com |
| RT3 system | Real-time | 27 days/battery charge | WiFi 2.4 GHz ISM band | 0.5, 1, 2, 4 / 24 bit | WirelessSeismic/www.wirelessseismic.com |
| Technology | Comm. Range (m)/Type | Data Rate (Mbit/s) | Power Consumption mJ/MB |
|---|---|---|---|
| ZigBee | 50/Short Range (SR) | 0.25 | 8–32 |
| MB-OFDM | 10/SR 30/SR | 200 53 | 12–16 8 |
| UWB-Impulse Radio (UWB-IR) | 50/SR | 1–5 | 8 |
| GSM (EDGE) | 1000–2000/Long Range (LR) | 0.384 | 300 / |
| 3G (UMTS) | 1000–2000/LR | 2 | 80 / |
| 4G (LTE) | >1000/LR | 100–1000 | 80 / |
| 5G | ∼250/SR | >1000 | 80 / |
| IEEE 802.11g | 160/SR 70/SR | 6 54 | 120–160 |
| IEEE 802.11n IEEE 802.11af IEEE 802.11ah | 750/LR 1000–2000/LR 1000/LR | 125 26.7 40 | 8 / 8 / 8 / |
| Parameter | Value |
|---|---|
| Operating Frequency | |
| Recording Period Tr | 5 |
| Simulation Area | 625 × 600 |
| Simulation Time | 15 |
| WLAN MTU | 1500 |
| Physical Environment | Flat ground |
| Propagation Model | Free space path loss |
| Background Noise | Isotropic scalar |
| Node Max. Transmit Power | 20 dBm |
| Bandwidth | 20 |
| Traffic Type | Periodic (UDP based) |
| PHY Bit Rate | 54 Mbit/s |
| Packet retransmission limit | 7 |
| Beacon Interval | 100 |
| SIFS | 10 μs |
| slotTime | 20 μs |
| DIFS | 50 μs |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Makama, A.; Kuladinithi, K.; Timm-Giel, A. Wireless Geophone Networks for Land Seismic Data Acquisition: A Survey, Tutorial and Performance Evaluation. Sensors 2021, 21, 5171. https://doi.org/10.3390/s21155171
Makama A, Kuladinithi K, Timm-Giel A. Wireless Geophone Networks for Land Seismic Data Acquisition: A Survey, Tutorial and Performance Evaluation. Sensors. 2021; 21(15):5171. https://doi.org/10.3390/s21155171
Chicago/Turabian StyleMakama, Aliyu, Koojana Kuladinithi, and Andreas Timm-Giel. 2021. "Wireless Geophone Networks for Land Seismic Data Acquisition: A Survey, Tutorial and Performance Evaluation" Sensors 21, no. 15: 5171. https://doi.org/10.3390/s21155171
APA StyleMakama, A., Kuladinithi, K., & Timm-Giel, A. (2021). Wireless Geophone Networks for Land Seismic Data Acquisition: A Survey, Tutorial and Performance Evaluation. Sensors, 21(15), 5171. https://doi.org/10.3390/s21155171