
DoA Estimation for FMCW Radar by 3D-CNN

 ,
, 
 ,
,
Abstract
:1. Introduction
2. Materials and Methods
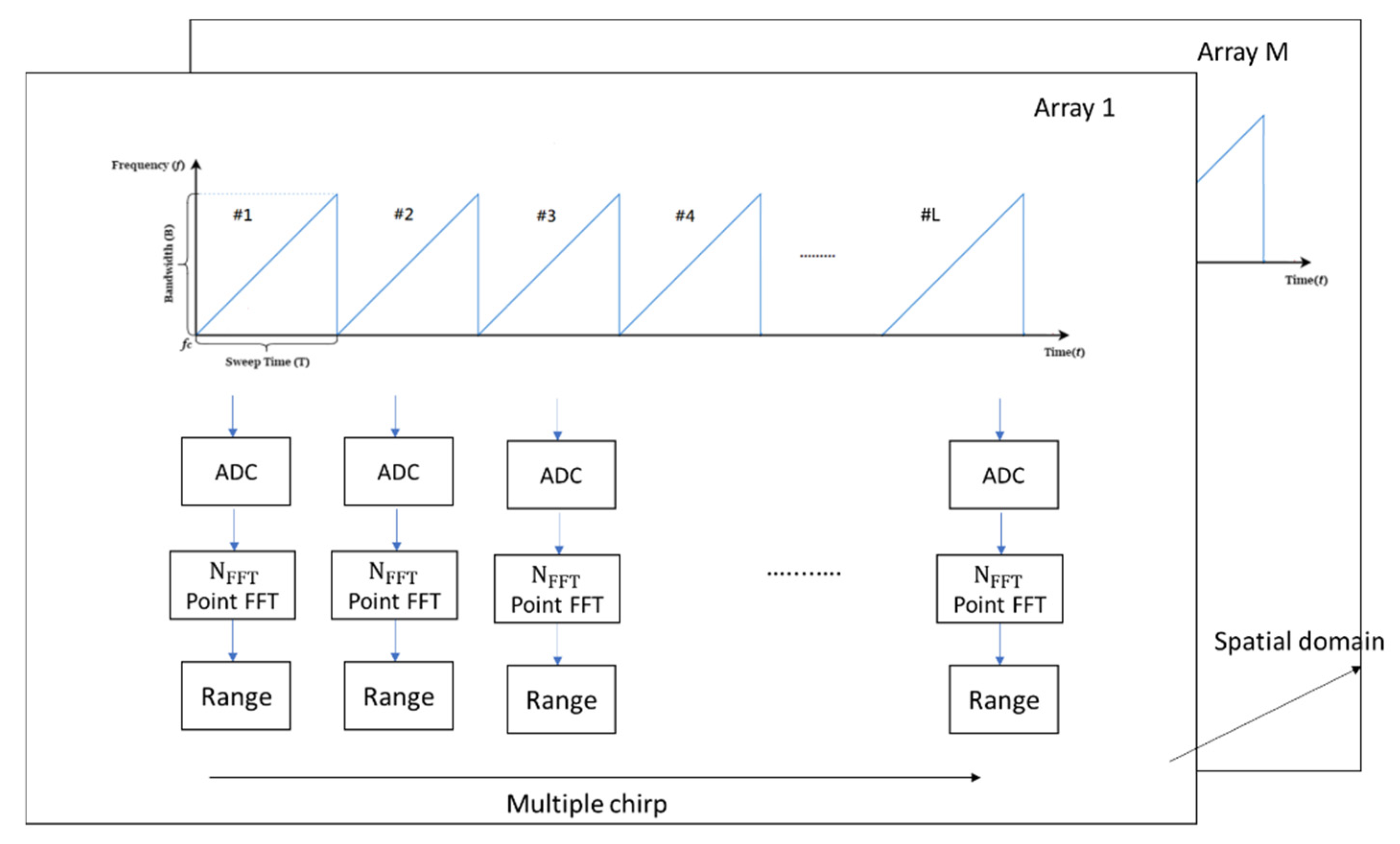
2.1. Signal Model and Signal Preprocessing
2.2. DoA Estimation by CNN
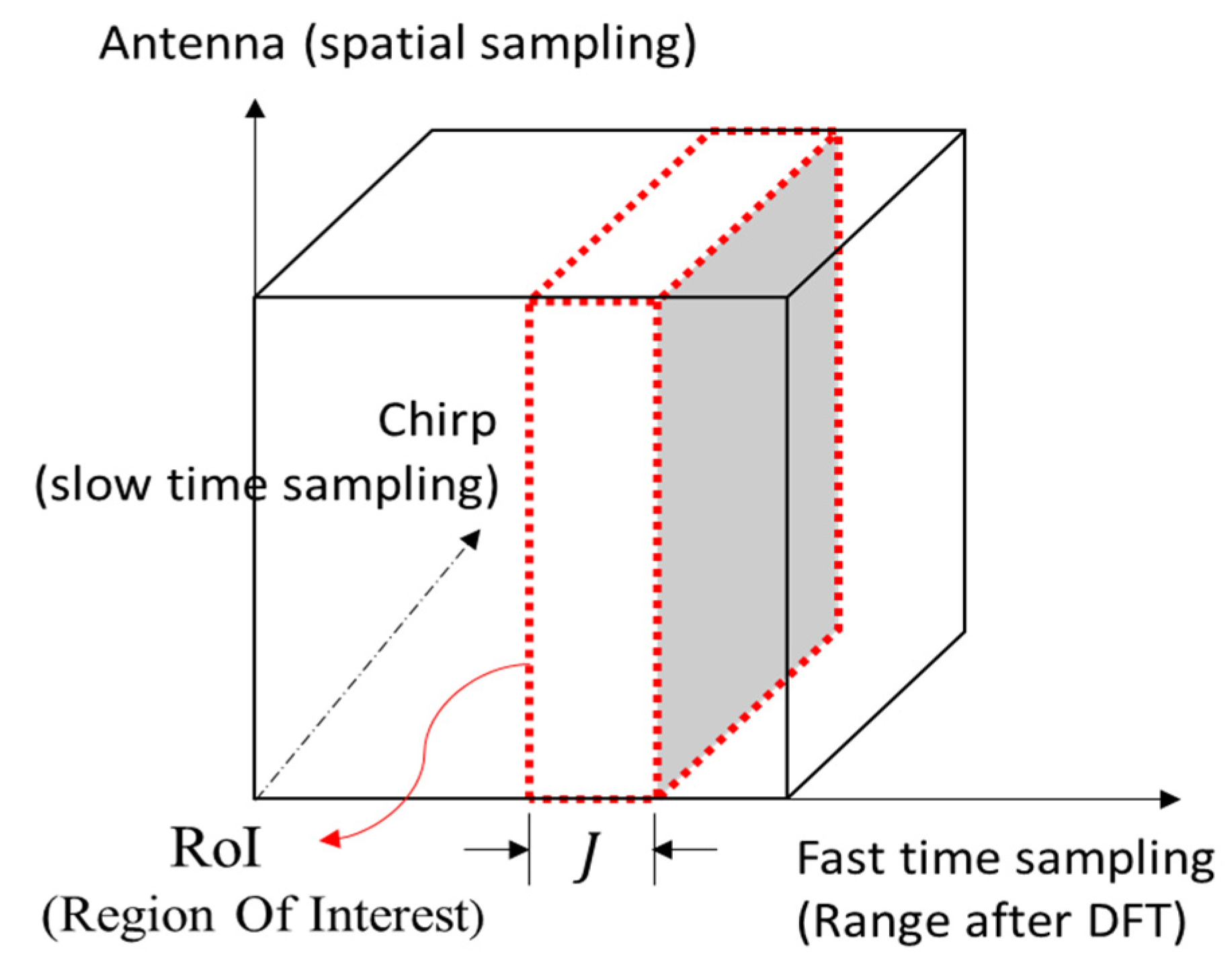
- Signal preprocessing and the selection of RoI have been described in the previous subsection.
- An independent small-size fully connected NN is used to estimate the number of targets. The signal’s statistical average is found to be more robust to provide coarse information, such as the number of targets; while the data cube contains subtle information without being averaged out so that it enables high-resolution DoA estimation. The input of the simple fully-connected NN to estimate the number of targets is an covariance matrix (in our case, ), and the covariance matrix is obtained by (8). The estimated number (0, 1, or 2) will then be used to choose the one-target or two-target 3D-CNN for estimating the DoAs.
- The 3D-CNN does DoA estimation by treating it as a classification task [32]. There are 21 classes (corresponding to DoAs in the RoI) to be classified. The angular resolution is set to for two reasons. First, is commonly regarded as a minimum requirement for applications in ADAS [1]. Second, higher angular resolution will lead to a larger 3D-CNN and increase the risk of facing more difficulties in training. In Figure 4, the highlighted RoI is the input to the 3D-CNN and it is a tensor (in our case, , , , which stand for number of fast-time samples, of antennas, and of chirps respectively). The 3 is the number of data formats that include the absolute value, the real part, and imaginary part; using the arrangement it is shown to yield better performance than only using the real and imaginary parts [27]. The first convolutional layer in the 3-D CNN (Conv1) uses 30 5 3 kernels with the stride step of 1 1 1, and the number of channels is 256. The same number of channels are passed to the second convolutional layer (Conv2), which uses 2 2 2 kernels, and a max pooling (MP) layer follows. The output of feature extraction is then flattened and connected into the form of a matrix, and a four-layer fully connected layer is used for its classification. The loss function used for the classification task is binary cross entropy in the Pytorch environment [33].
- The parameters for the fully-connected NN and 3D-CNN are listed in Table 1 and Table 2. The term FC stands for fully connected and BN for batch normalization [34]. In the training of this fully-connect NN and the 3D-CNN, the popular optimization tool ADAM and the drop-out technique are used [35,36].
2.3. Data Generation and Data Augmentation
3. Results
3.1. Simulation Results
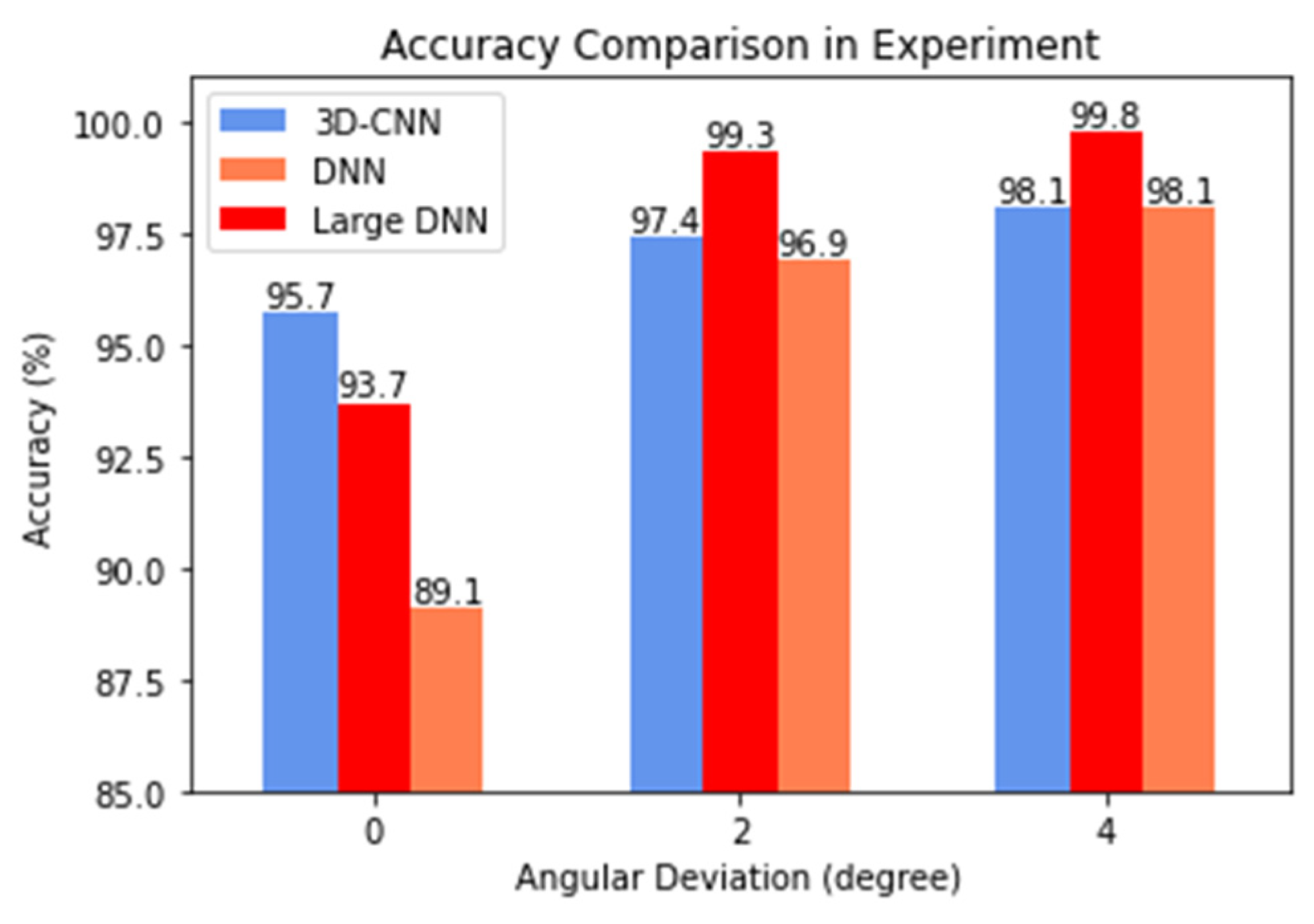
3.2. Experimental Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wenger, J. Automotive radar—Status and perspectives. In Proceedings of the IEEE Compound Semiconductor Integrated Circuit Symposium (CSIC ‘05), Palm Springs, CA, USA, 30 October–2 November 2005; pp. 21–24. [Google Scholar]
- Hasch, J.; Topak, E.; Schnabel, R.; Zwick, T.; Weigel, R.; Waldschmidt, C. Millimeter-Wave Technology for Automotive Radar Sensors in the 77 GHz Frequency Band. IEEE Trans. Microw. Theory Tech. 2012, 60, 845–860. [Google Scholar] [CrossRef]
- Sang, T.-H.; Tsaiv, S.; Yu, T. Mitigating Effects of Uniform Fog on SPAD Lidars. IEEE Sens. Lett. 2020, 4, 1–4. [Google Scholar] [CrossRef]
- Kukkala, V.K.; Tunnell, J.; Pasricha, S.; Bradley, T. Advanced Driver Assistance Systems: A Path Toward Autonomous Vehicles. IEEE Consum. Electron. Mag. 2015, 7, 18–25. [Google Scholar] [CrossRef]
- Rohling, H. Milestones in radar and the success story of automotive radar systems. In Proceedings of the 11-th International Radar Symposium, Vilnius, Lithuania, 16–18 June 2010. [Google Scholar]
- Capon, J. High-resolution frequency-wavenumber spectrum analysis. Proc. IEEE 1969, 57, 1408–1418. [Google Scholar] [CrossRef] [Green Version]
- Barabell, A. Improving the resolution performance of eigenstructure-based direction-finding algorithms. In Proceedings of the ICASSP ‘83. IEEE International Conference on Acoustics, Speech, and Signal Processing, Boston, MA, USA, 14–16 April 1983; Volume 8, pp. 336–339. [Google Scholar]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef] [Green Version]
- Friedlander, B.; Weiss, A.J. Direction finding in the presence of mutual coupling. IEEE Trans. Antennas Propag. 1991, 39, 273–284. [Google Scholar] [CrossRef]
- Krim, H.; Viberg, M. Two decades of array signal processing research: The parametric approach. IEEE Signal Process. Mag. 1996, 13, 6794. [Google Scholar] [CrossRef]
- Chen, P.; Wu, T.-J.; Yang, J. A comparative study of model selection criteria for the number of signals. IET Radar Sonar Navig. 2008, 2, 180–188. [Google Scholar] [CrossRef]
- Elbir, A.M. Deepmusic: Multiple Signal Classification via Deep Learning. IEEE Sens. Lett. 2020, 4, 1–4. [Google Scholar] [CrossRef] [Green Version]
- Kase, Y.; Nishimura, T.; Ohgane, T.; Ogawa, Y.; Kitayama, D.; Kishiyama, Y. Doa estimation of two targets with deep learning. In Proceedings of the 2018 15th Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 25–26 October 2018; pp. 1–5. [Google Scholar]
- Tang, G.; Gao, X.; Chen, Z.; Zhang, Y.; Zhong, H.; Li, M. Deep Neural Network Based Multiple Targets DOA Estimation for Millimeter-Wave Radar. In Proceedings of the 2019 IEEE SmartWorld, Ubiquitous Intelligence & Computing, Advanced & Trusted Computing, Scalable Computing & Communications, Cloud & Big Data Computing, Internet of People and Smart City Innovation (SmartWorld/SCALCOM/UIC/ATC/CBDCom/IOP/SCI), Leicester, UK, 19–23 August 2019; pp. 433–438. [Google Scholar]
- Chakrabarty, S.; Habets, E.A.P. Multi-Speaker DOA Estimation Using Deep Convolutional Networks Trained with Noise Signals. IEEE J. Sel. Top. Signal Process. 2019, 13, 8–21. [Google Scholar] [CrossRef] [Green Version]
- Ling, Y.; Gao, H.; Zhou, S.; Yang, L.; Ren, F. Robust Sparse Bayesian Learning-Based Off-Grid DOA Estimation Method for Vehicle Localization. Sensors 2020, 20, 302. [Google Scholar] [CrossRef] [Green Version]
- Gall, M.; Gardill, M.; Fuchs, J.; Horn, T. Learning Representations for Neural Networks Applied to Spectrum-Based Direction-of-Arrival Estimation for Automotive Radar. In Proceedings of the 2020 IEEE/MTT-S International Microwave Symposium (IMS), Los Angeles, CA, USA, 4–6 August 2020; pp. 1031–1034. [Google Scholar]
- Chen, M.; Gong, Y.; Mao, X. Deep Neural Network for Estimation of Direction of Arrival with Antenna Array. IEEE Access 2020, 8, 140688–140698. [Google Scholar] [CrossRef]
- Cong, J.; Wang, X.; Huang, M.; Wan, L. Robust DOA Estimation Method for MIMO Radar via Deep Neural Networks. IEEE Sens. J. 2021, 21, 7498–7507. [Google Scholar] [CrossRef]
- Stoica, P.; Moses, R.L. Introduction to Spectral Analysis, 1st ed.; Prentice-Hall: Hoboken, NJ, USA, 1997; pp. 221–247. [Google Scholar]
- Rao, S.; Ahmad, A.; Roh, J.C.; Bharadwaj, S. 77GHz single chip radar sensor enables automotive body and chassis applications. Tex. Instrum. 2017. [Google Scholar]
- Patole, S.M.; Torlak, M.; Wang, D.; Ali, M. Automotive radars: A review of signal processing techniques. IEEE Signal Process. Mag. 2017, 34, 22–35. [Google Scholar] [CrossRef]
- Rohling, H. Radar CFAR Thresholding in Clutter and Multiple Target Situations. IEEE Trans. Aerosp. Electron. Syst. 1983, AES-19, 608–621. [Google Scholar] [CrossRef]
- Rohling, H.; Mende, R. OS CFAR performance in a 77 GHz radar sensor for car application. Proc. Int. Radar Conf. 1996, 109–114. [Google Scholar]
- Rohling, H. Ordered statistic CFAR technique—An overview. In Proceedings of the 2011 12th International Radar Symposium (IRS), Leipzig, Germany, 7–9 September 2011; pp. 631–638. [Google Scholar]
- Elbir, A.M.; Mishra, K.V. Joint Antenna Selection and Hybrid Beamformer Design Using Unquantized and Quantized Deep Learning Networks. IEEE Trans. Wirel. Commun. 2020, 19, 1677–1688. [Google Scholar] [CrossRef] [Green Version]
- Haykin, S. Neural Networks and Learning Machines, 3rd ed.; Prentice Hall: New York, NY, USA, 2009. [Google Scholar]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning representations by back-propagating errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Ji, S.; Xu, W.; Yang, M.; Yu, K. 3D Convolutional Neural Networks for Human Action Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 221–231. [Google Scholar] [CrossRef] [Green Version]
- Sang, T.-H.; Xu, Y.-C. Clipping noise compensation with neural networks in OFDM systems. Signals 2020, 1, 100–109. [Google Scholar] [CrossRef]
- El Zooghby, A.H.; Christodoulou, C.G.; Georgiopoulos, M. A neural network-based smart antenna for multiple source tracking. IEEE Trans. Antennas Propag. 2000, 48, 768–776. [Google Scholar] [CrossRef]
- Binary Cross Entropy Documentation. Available online: https://pytorch.org/docs/master/generated/torch.nn.functional.binary_cross_entropy.html#torch-nn-functional-binary-cross-entropy (accessed on 23 May 2021).
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. Proc. Mach. Learn. 2015, 37, 448–456. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:preprint/1412.6980. [Google Scholar]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Stoica, P.; Nehorai, A. MUSIC, maximum likelihood, and Cramer-Rao bound. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 720–741. [Google Scholar] [CrossRef]
- MATLAB Phased Array System Toolbox Documentation. Available online: https://www.mathworks.com/help/phased (accessed on 7 April 2021).
- AWR1843 Single-Chip 77- to 79-GHz FMCW Radar Sensor. Available online: https://www.ti.com/lit/ds/symlink/awr1843.pdf?ts=1594818635366&ref_url=https%253A%252F%252Fwww.google.com%252F (accessed on 7 April 2021).
- Short Range Radar Reference Design Using AWR1642. Available online: https://www.ti.com/lit/ug/tidud36b/tidud36b.pdf?ts=1597060222338&ref_url=ht (accessed on 6 August 2021).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer | No. of Filter | Activation | Layer | No. of Filter | Activation |
|---|---|---|---|---|---|
| Input | 56 | FC3 + BN | 1024 | ReLu | |
| FC1 + BN | 1024 | ReLu | FC4 + BN | 1024 | ReLu |
| FC2 + BN | 1024 | ReLu | FC5 + BN | 3 | Sigmoid |
| Layer | Filter | No. of Filter | Activation | Output |
|---|---|---|---|---|
| RoI spectrum | 65 × 8 × 4 × 3 | |||
| Conv1 | (30, 5, 3) | 256 | ReLu | |
| Conv2 | (2, 2, 2) | 256 | ReLu | |
| MaxPool 1 | (2, 2, 2) | |||
| FC | ReLu | 500 | ||
| FC | ReLu | 200 | ||
| FC | ReLu | 100 | ||
| FC | Sigmoid | 21 |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Transmit signal | FMCW | Target Number | 0, 1 or 2 |
| Carrier Frequency | 77 GHz | Target Range | 70 m to 90 m |
| Frequency Slope | 3.476 THz/s | Target Angle | −10 to 10 |
| Bandwidth | 0.15 GHz | Samples per chirp | 256 |
| Tx/Rx Antenna | 1/8 | SNR | −10 dB to 15 dB |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Transmit signal | FMCW | Target Number | 0, 1 or 2 |
| Carrier Frequency | 77 GHz | Target Range | 10 m |
| Frequency Slope | 4.2 THz/s | Range Augmentation | 9.7 m to 10.3 m |
| Bandwidth | 3.5 GHz | Target Angle | −10 to 10 |
| Tx/Rx Antenna | 2/4 | Samples per chirp | 512 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sang, T.-H.; Chien, F.-T.; Chang, C.-C.; Tseng, K.-Y.; Wang, B.-S.; Guo, J.-I. DoA Estimation for FMCW Radar by 3D-CNN. Sensors 2021, 21, 5319. https://doi.org/10.3390/s21165319
Sang T-H, Chien F-T, Chang C-C, Tseng K-Y, Wang B-S, Guo J-I. DoA Estimation for FMCW Radar by 3D-CNN. Sensors. 2021; 21(16):5319. https://doi.org/10.3390/s21165319
Chicago/Turabian StyleSang, Tzu-Hsien, Feng-Tsun Chien, Chia-Chih Chang, Kuan-Yu Tseng, Bo-Sheng Wang, and Jiun-In Guo. 2021. "DoA Estimation for FMCW Radar by 3D-CNN" Sensors 21, no. 16: 5319. https://doi.org/10.3390/s21165319
APA StyleSang, T.-H., Chien, F.-T., Chang, C.-C., Tseng, K.-Y., Wang, B.-S., & Guo, J.-I. (2021). DoA Estimation for FMCW Radar by 3D-CNN. Sensors, 21(16), 5319. https://doi.org/10.3390/s21165319