6.1. Investigation of Crucial Flowmeter Design Parameters by Numerical Simulation
For this set of simulations, a calorimetric constant temperature sensor-heater-sensor (S-H-S) flowmeter configuration was employed. This configuration was chosen as the most promising one, but it is also one of the most demanding approaches for practical implementation [
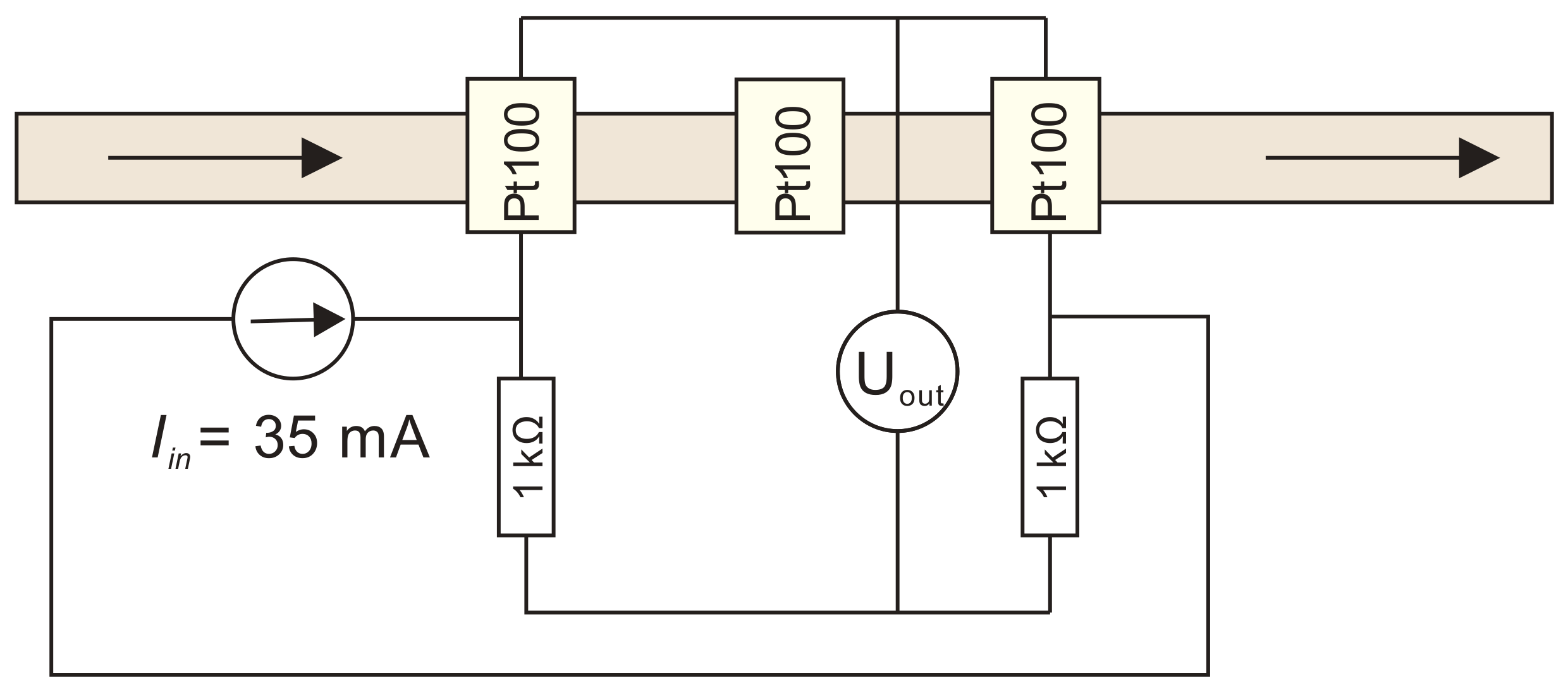
23]. In the S-H-S configuration, the middle Pt100 element was employed as a heater while the first (upstream) and the third (downstream) were employed as temperature sensor elements and were connected in a Wheatstone bridge (
Figure 5). Upstream and downstream sensors are defined relating to the flow direction.
Three geometrical parameters and a heater temperature parameter were varied one at the time through a specified range by using a parametric sweep procedure defined by Comsol.
The default parameter values for the channel width, the distance between adjacent platinum sensors, the channel depth and the heater temperature were set to 2 mm, 2 mm, 20 µm and 50 °C, respectively. For each value of the varied crucial parameters, a Wheatstone bridge output voltage was calculated for the flowrates ranging from 0 to 100 µL·min−1 with a step of 10 µL·min−1. The Wheatstone bridge supply voltage was set to 1 V.
Firstly, a channel width parameter was varied from 0.5 mm to 3 mm, keeping the distance between adjacent Pt100 elements, the channel depth and the heater temperature at the default values as defined in the above paragraph (
Figure 6).
We define the upper limit of the measuring range as the flowrate value at which the flowmeter reaches 95% of its maximal response capability. Taking this in account, the upper limit of the measuring range for 0.5 mm wide measuring channel is 40 µL·min−1. At flowrates larger than 40 µL·min−1, the output voltage becomes saturated to a value of 7.5 mV. By increasing the channel width, the flowmeter upper limit of the measuring range gradually increases and reaches 100 µL·min−1 for 3.0 mm wide measuring channel. However, the widening of the channel affects the flowmeter sensitivity. To make this device comparable with similar devices already reported in the literature, sensitivity will be expressed in °C·µL−1·min units in order to be independent of the RTD nominal values and of the readout electronics. In the lower flowrate range from 0 to 10 µL·min−1, the sensitivity of the sensor decreases from 1.3 °C·µL−1·min to 0.625 °C·µL−1·min for 0.5 mm and 3 mm wide channel, respectively. By widening the channel, we speculate that two mechanisms counteract each other which affects the final flowmeter response. On one hand, by widening of the channel, the thermal transfer from the heater to the fluid and from the fluid to the sensors is promoted due to an increased contact surface area. But on the other hand, the total heat transfer is limited due to a lower fluid velocity in a wider channel. It is assumed that the second mechanism prevails, resulting in the decrease of the flowmeter response when the channel width is increased.
For the rapid prototyped mass flowmeter fabrication, the dedicated markers are crucial for proper manual alignment of Pt100 elements along the microchannel (see
Figure 3a). The final channel width was set to 1.5 mm which enabled us to design the markers of sufficient size for precise manual alignment of Pt100 elements (see
Section 2, Design). According to numerical simulation results (
Figure 6), chosen channel width of 1.5 mm should assure flowmeter sensitivity of 1 °C·µL
−1·min and the upper limit of the measuring range of more than 70 µL·min
−1.
Secondly, the distance between adjacent Pt100 elements was varied from 0.1 mm to 2.5 mm, whereby the channel width was set to 1.5 mm and the channel depth and the heater temperature at default value. Simulated results are shown in
Figure 7. By increasing the distance between adjacent Pt100 elements, the flowmeter upper limit of the measuring range gradually decreases according to the criteria set in
Section 6.1. At the same time, the sensitivity in the lower flowrate range (from 0 to 10 µL·min
−1) increases, from 0.55 °C·µL
−1·min to 1.2 °C·µL
−1·min for spacing distance of 0.1 mm and 2.5 mm, respectively. We observed that increasing of the distance between adjacent Pt100 elements has an analogous effect on the Wheatstone bridge output response as narrowing of the fluidic channel.
By increasing the distance between adjacent Pt100 elements at non-zero flowrate, a temperature difference between upstream and downstream sensing element is increased due to a non-symmetric thermal distribution profile of a flow stream, which is shifted in the direction of the flow, increasing flowmeter sensitivity. However, an increased distance between adjacent elements might affect flowmeter time response at low fluid velocities, since more time is needed to transfer the heat from the heater to the distant placed sensor elements at sudden flowrate changes. Furthermore, by increasing the distance between adjacent elements, the upper limit of the flowmeter measuring range decreases. In this respect, we set the distance between adjacent Pt100 elements to 1.5 mm (a compromise value) for the fabricated prototype.
The symmetrical configuration is not the most efficient configuration in order to obtain the optimal measuring range, since the contribution of each sensing element (upstream and downstream) to the total sensor signal is not the same. For further optimization, the distance of each element should be studied separately and the optimal up/downstream location should be extracted in order to obtain the widest flow range. An excellent work in terms of this approach was undertaken by Petropoulos A. and Kaltsas G. in 2010 [
1]. The authors managed to increase the measuring range of their PCB-MEMS liquid microflow sensor by setting the upstream distance to an optimum value of 0.425 mm and by increasing the downstream distance at the same time. They concluded that no specific combination of the sensing elements distance provides optimal results throughout the entire measuring range, which implies that the flowmeter design should be an application specific.
Thirdly, the channel depth parameter was varied from 10 µm to 1000 µm keeping the channel width and the distance between adjacent Pt100 elements at selected values of 1.5 mm and 1.5 mm, respectively. Heater temperature was set to the default value. Simulated results are shown in
Figure 8.
After increasing the channel depth from 10 µm to 20 µm, no significant alteration in the sensor output characteristic was observed. Both characteristics increase exponentially to a maximum of 7.8 mV. The steep slope in an initial flowrate interval of 0 to 10 µL·min−1 can also be described by a linear function with a slope coefficient of 52 × 10−5 V min·µL−1 (equals 1.3 °C·µL−1·min). At the channel depth of 100 µm, the bridge output voltage increases exponentially to a maximum value of 7.46 mV at 60 µL·min−1 and then gradually decreases to 7.28 mV at 100 µL·min−1. As the channel depth increases further, the bridge response decreases, which affects both the maximum output voltage and the slope coefficients, i.e., the sensitivity. With a channel depth parameter value of 1000 µm, the sensitivity of the flowmeter decreases to 0.7 °C·µL−1·min (46% drop) and the maximum response to 4.342 mV (44% drop) as compared to 10 µm channel depth.
An increase of the channel depth parameter value did not extend the initial measuring range of the device as one might expect due to the presumption that deeper measuring channel allows more fluid flow through the sensor at the same heat transfer from the heater to adjacent sensor elements.
Indeed, when the focus is on the limited flowrate interval from 0 to 20 µL·min
−1 (
Figure 8), the output signal for the same flowrate does decrease with the increasing depth of the channel. From this correlation, one might wrongly assume that the deeper channel sensor characteristic will saturate latter and extend the upper limit of the sensor measuring range. On the contrary, simulation results reveal that the initial upper limit of the measuring range is rather decreased due to inflection points in Wheatstone bridge output characteristics (for channel depth ≥100 µm, as seen in
Figure 8).
The parameter that is actually measured by the device is the flow velocity over the heater/sensor elements and not the volumetric flowrate. However, even when the results are presented as a function of the mean flow velocity for various channel depths (
Appendix A), an implementation of a deeper channel does not extend the measuring range of the mean flow velocity.
In order to study this phenomenon in detail, additional numerical simulations were performed. For two extreme cases of the channel depth i.e., 10 µm and 1000 µm, the temperature vs. flowrate relation for the upstream and the downstream sensor element was studied in simulation environment where the flowrate was varied from 0 to 100 µL·min
−1 for both channel depths (
Figure 9).
In both channels (depth of 10 and 1000 µm), less and less heat is transferred to the upstream element as the flowrate increases, which reflects in the temperature drop of the upstream element (
Figure 9, squares and circles symbols).
It is even more significant to study the temperature of the downstream sensing element. In order to explain the inflection points of sensor characteristics (see
Figure 8) a maximum temperature difference of the medium beneath the heating element and beneath the downstream element was studied in the simulation environment (a vertical temperature profile of the medium beneath the elements). The results of the study follow below:
With a shallow 10 μm channel, the heater heats the medium down to the bottom of the channel regardless of the flowrate (10 to 100 µL·min−1), and the maximum temperature difference of the medium under the heater is only 0.0116 °C and 0.0175 °C for the flowrate of 10 µL·min−1 and 100 µL·min−1, respectively. This is due to the high ratio between the surface of the heater and the depth of the channel.
The temperature under the downstream sensor is also vertically uniform through the depth (<0.002 °C difference for all flowrates) and increases with the flowrate, which means that the higher the flowrate, the more heat is transferred from the heater to the downstream element. This is indicated by the elevated temperature of the downstream element (
Figure 9, triangle symbols). Since the output signal is proportional to the temperature difference of the two sensing elements, the signal follows the increase in flowrate in the range of 0 to 100 µL·min
−1.
For the case of the 1000 µm deep channel, at a flow rate of 10 μL·min
−1 (see
Figure 10a), the heater is sufficiently efficient despite the poor surface vs. depth ratio. This is due to the low medium velocity and the maximum temperature difference of the medium under the heater still does not exceed 2.97 °C. As a result, even under the downstream sensor element, the medium temperature is quite uniform through the depth (<0.11 °C difference) and accounts for 48.44 °C in proximity of the element.
However, when the flowrate parameter is increased (see
Figure 10b), the heater can no longer heat the medium near the bottom of the channel. Therefore, at a flow rate of 100 µL·min
−1, the medium temperature at the bottom of the microchannel is as much as 23 °C lower (
T = 27 °C) as compared to the position right beneath the heater.
The lower cooler layer of the medium cools the warmer upper layer of the medium on its way toward the downstream element due to the vertical heat conduction. As a result, the temperature of the upper layer of the medium on its way to the downstream element already drops sharply (from 48.8 °C beneath the heater to 39 °C beneath the sensor for 100 µL·min
−1). This is reflected in the graph as the cooling of the downstream element by increasing the flowrate (
Figure 9, diamond symbols). Cooling of the upper medium layer due to the cooler bottom medium layer for channels depth ≥100 µm and for flowrates ≥40 µL·min
−1 is reflected in characteristic inflections (
Figure 8) and thus limits the measuring range of the device. To overcome this deficiency, a flowmeter with two heater elements positioned on both sides of the channel might be used which would heat the flow more uniformly.
Similar flowmeter characteristics with inflection points were reported by Lammerink, T.S. et al. [
24]. In the reported work, the authors derived the turn-over flow velocity
(from a fluid convection analytical model) which determines the useful flow range of the device:
where
is a measuring channel depth and
D is a thermal diffusivity. According to their model, by defining a turn over flowrate as
, where
is a channel width, the turn over flowrate
and thus an useful flow range of the device cannot be extended by the channel depth parameter
. However, according to their model, the measuring range of the device can be extended by widening of the channel (
), which again correlate with our simulation results (see
Figure 6).
Based on simulation results, the depth of the channel for the fabricated prototype was set to 10 µm. This parameter value should extend the upper limit of the flowmeter measuring range and simultaneously provide suitable geometric conditions for realization of a single actuator peristaltic micropump [
19] which is integrated on the same chip. However, with such a shallow depth of the microchannel, a relative non-uniformity of the depth along the microchannel is promoted. Non-uniformity of the depth can be caused by fluidic pressure which might deform the channel walls and the 150 µm thick glass membrane, or by stress on embedded Pt100 elements caused by e.g., electrical wiring. Furthermore, heating of the Pt100 elements causes temperature elongations of its ceramic base and surrounding PDMS which might cause further deformation of the channel.
Lastly, the heater temperature was varied from 30 °C to 80 °C keeping the crucial geometrical parameters i.e., the channel width, the distance between adjacent Pt100 elements and the channel depth at selected values of 1.5 mm, 1.5 mm and 10 µm, respectively. Simulated results are shown in
Figure 11.
From simulated characteristics it is evident that increasing of the heater temperature increases flowmeter sensitivity while simultaneously maintaining the measurement range almost unchanged. Simulated sensitivity in the range of 0 to 20 µL·min
−1 increased from 0.145 °C·µL
−1·min to 1.75 °C·µL
−1·min for the heater temperature of 30 °C and 80 °C, respectively. It should be mentioned that sensitivity of thermal mass flowmeter depends also on a medium temperature, since heat transfer from e.g., heater to the medium is driven by a temperature difference between both objects. However, investigation of this parameter is not covered in this work. To assure high sensitivity characteristics for our fabricated prototype in constant temperature S-H-S configuration we set the heater temperature to 80 °C (see
Section 6.2.1). For volatile and low-temperature evaporation chemicals, the temperature of the heater should be set much lower. In this case, the loss of sensitivity could be compensated for by increasing the distance between adjacent Pt100 elements, but on account of a reduced measuring range.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}