
Defect Width Assessment Based on the Near-Field Magnetic Flux Leakage Method

Abstract
:1. Introduction
2. “Near-Field Effect” in the MFL
2.1. FEM Model
2.2. Numerical Model
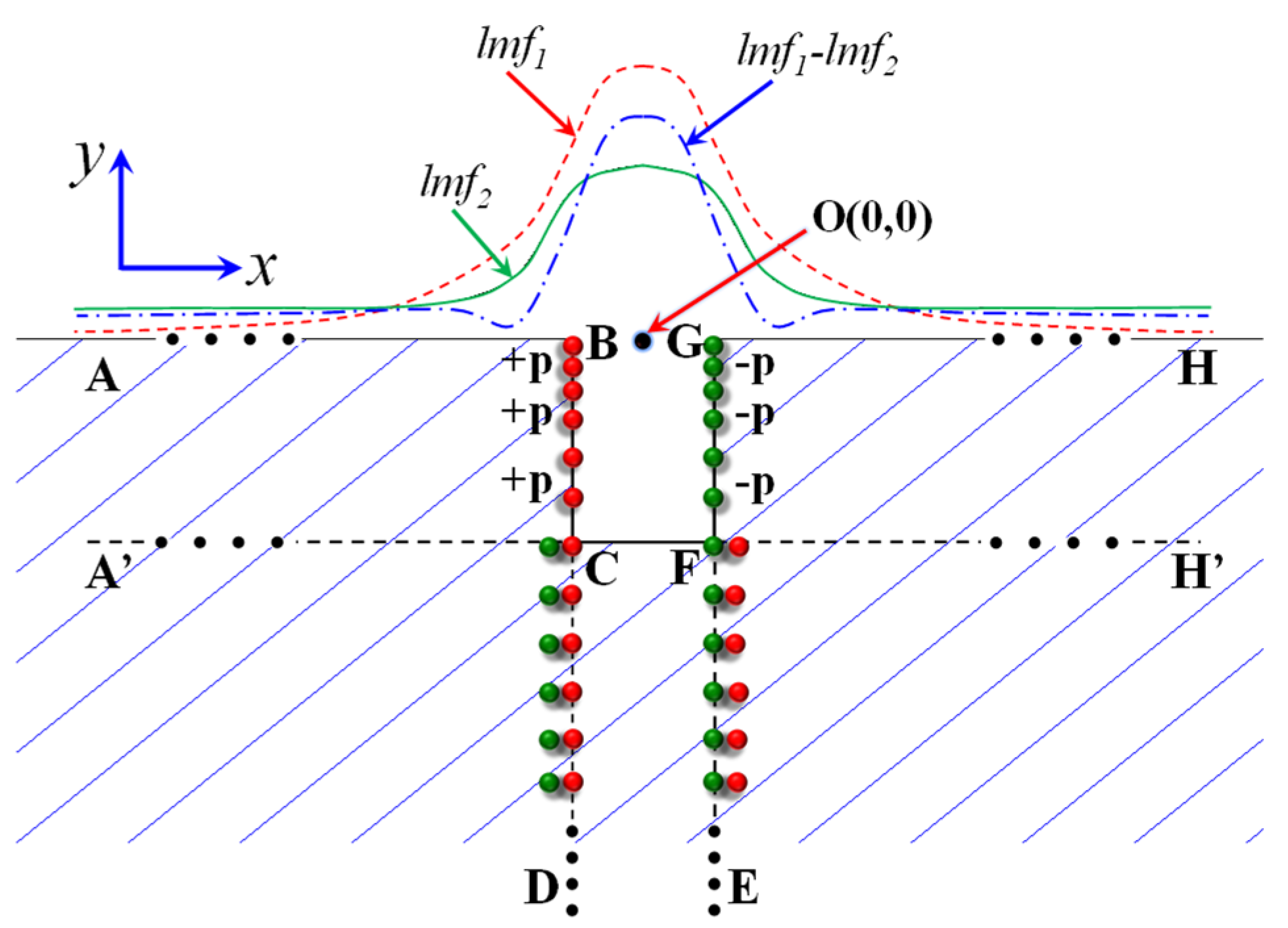
2.3. Analytical Model
2.4. Assessment of Width Values According to the “Near-Field Effect”
3. Experimental Setup
4. Results and Discussion
4.1. Studies of the “Near-Field Effect” in the MFL
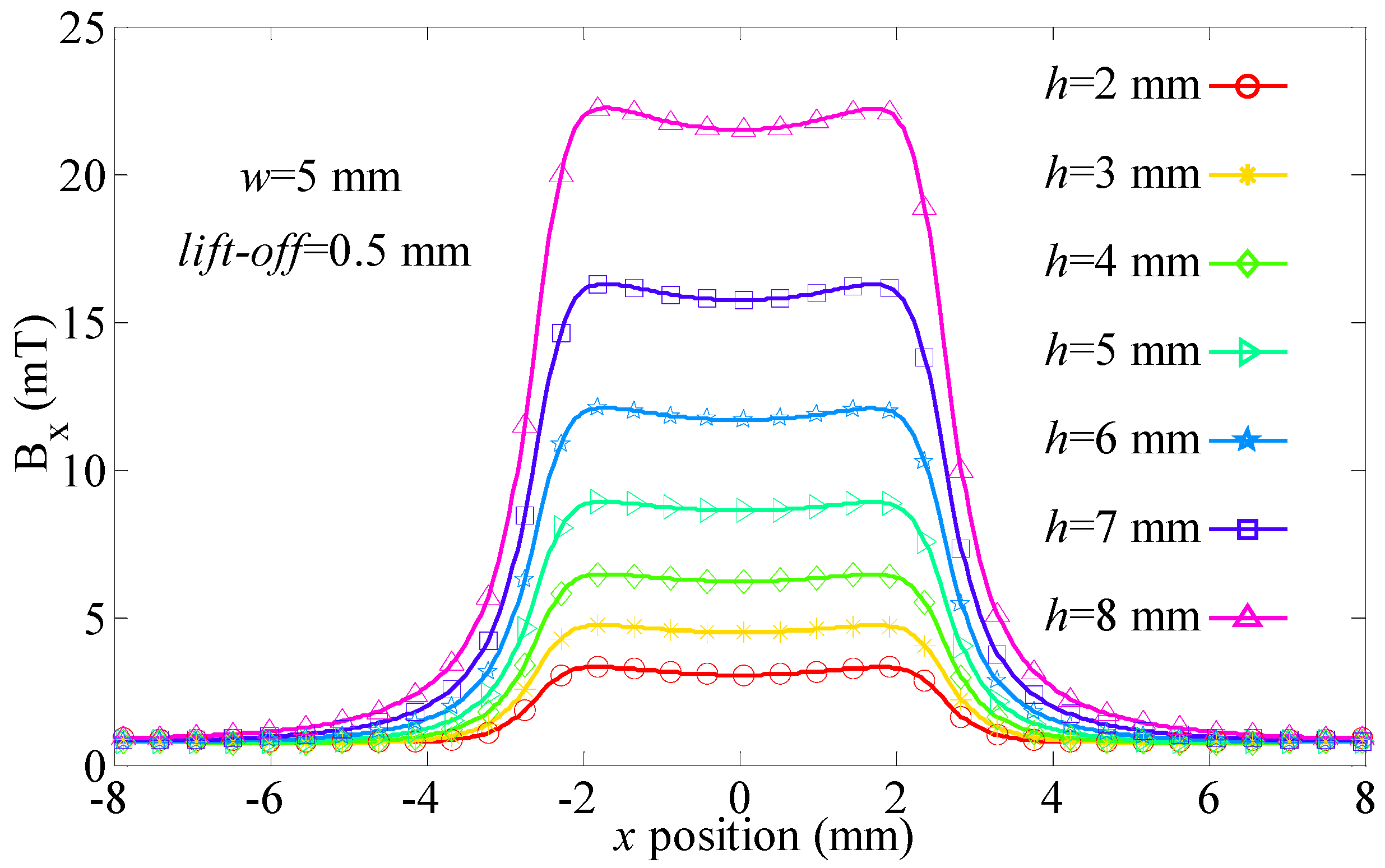
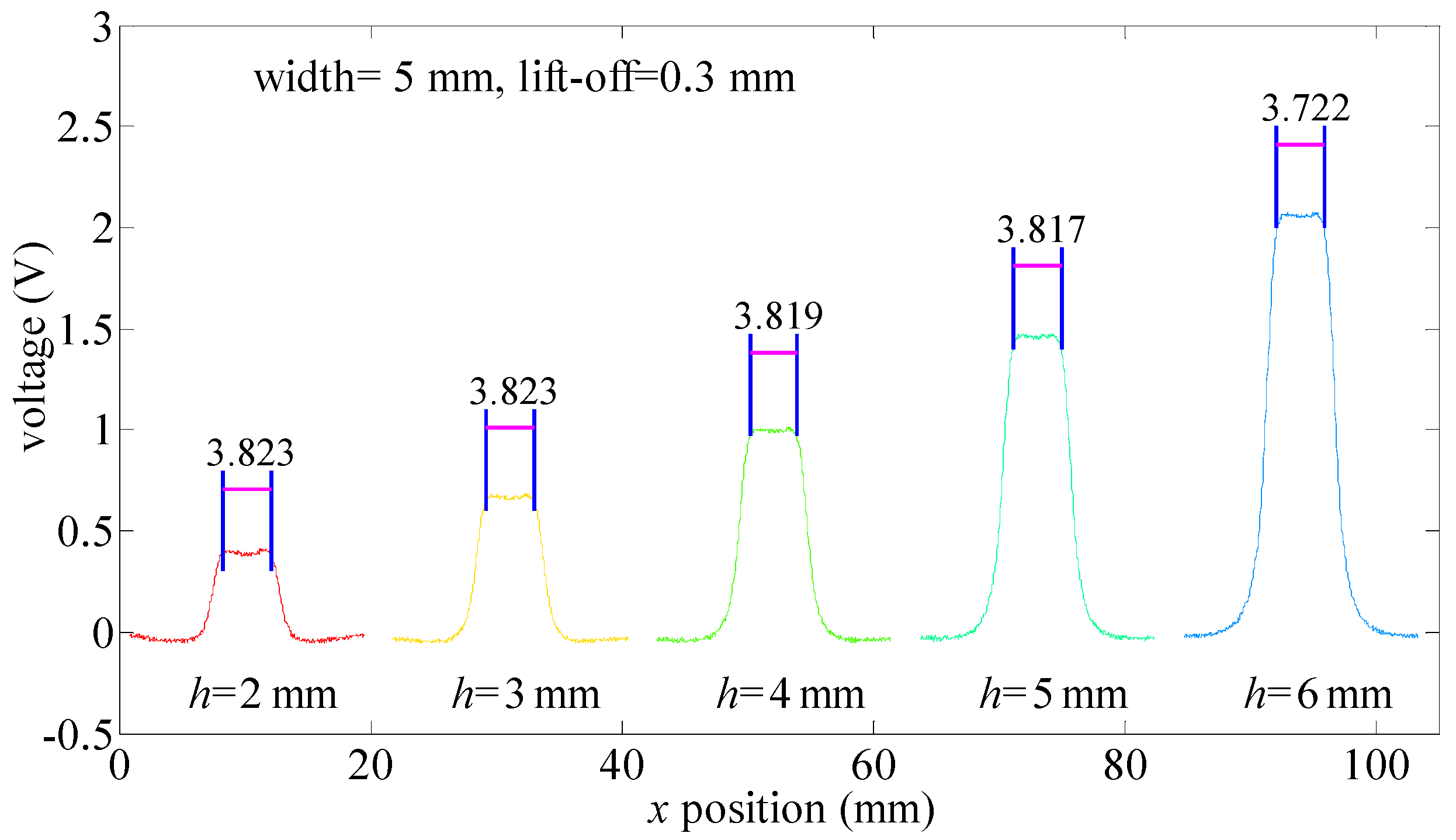
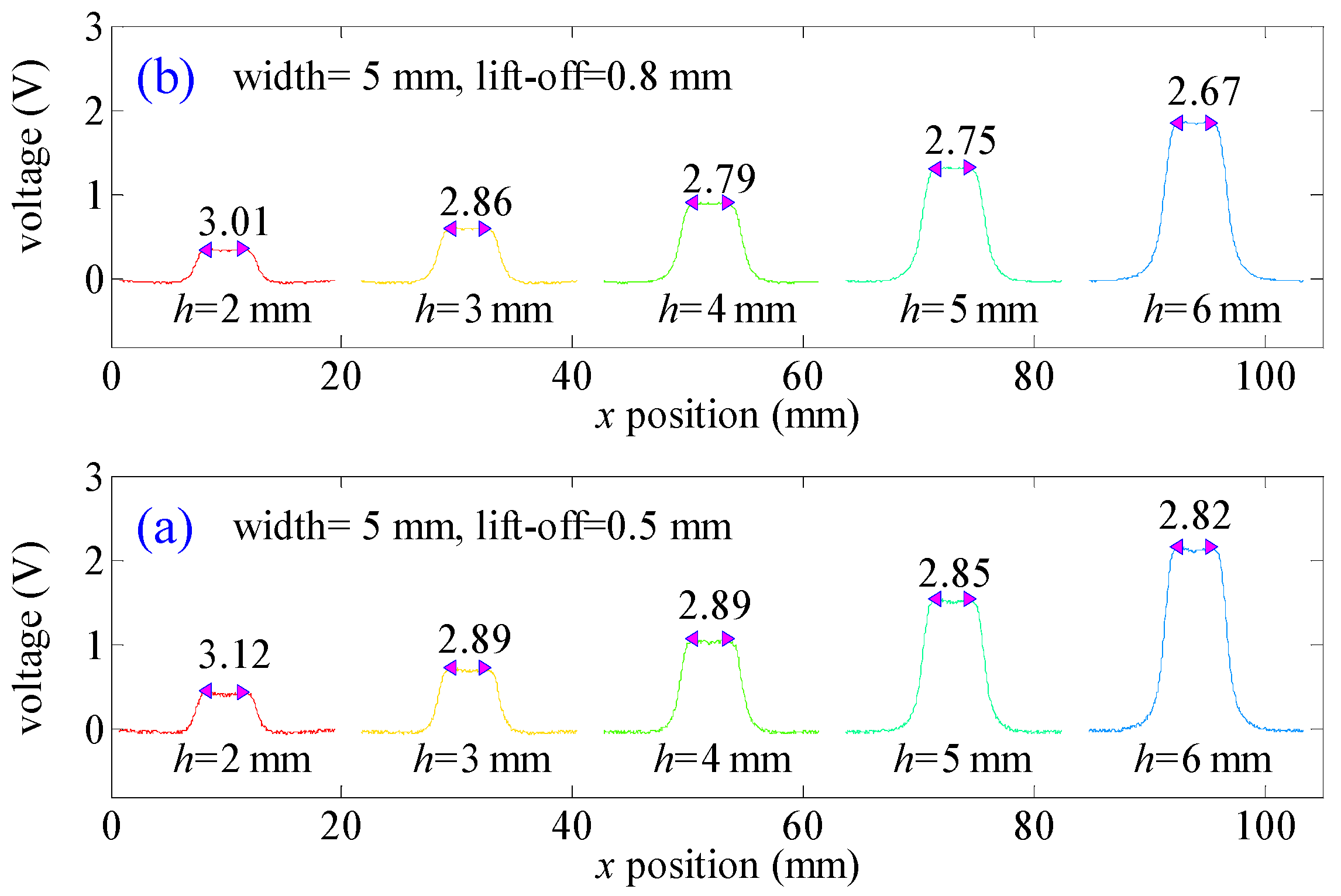
4.2. Relationship between Defect Depth Values and ws
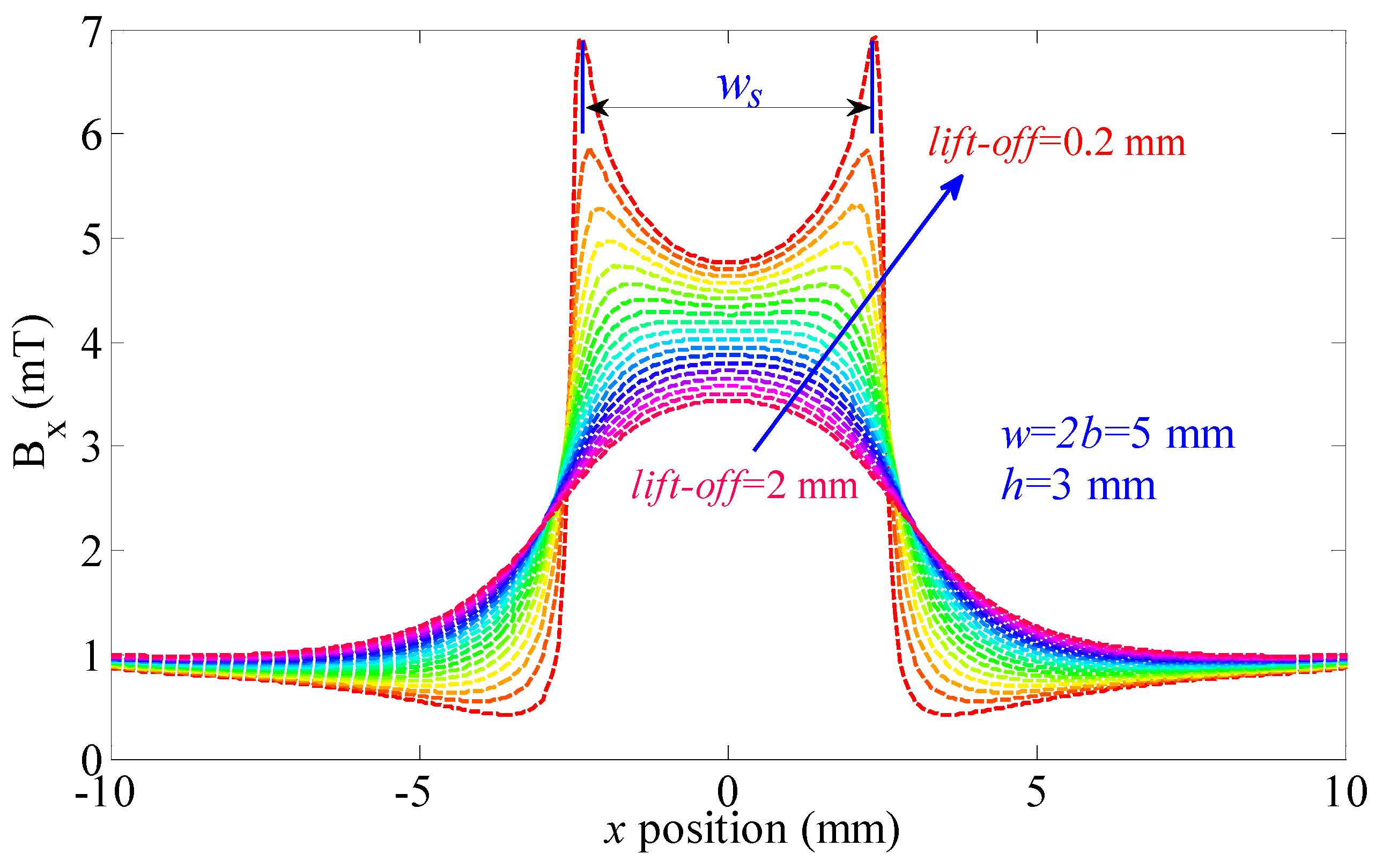
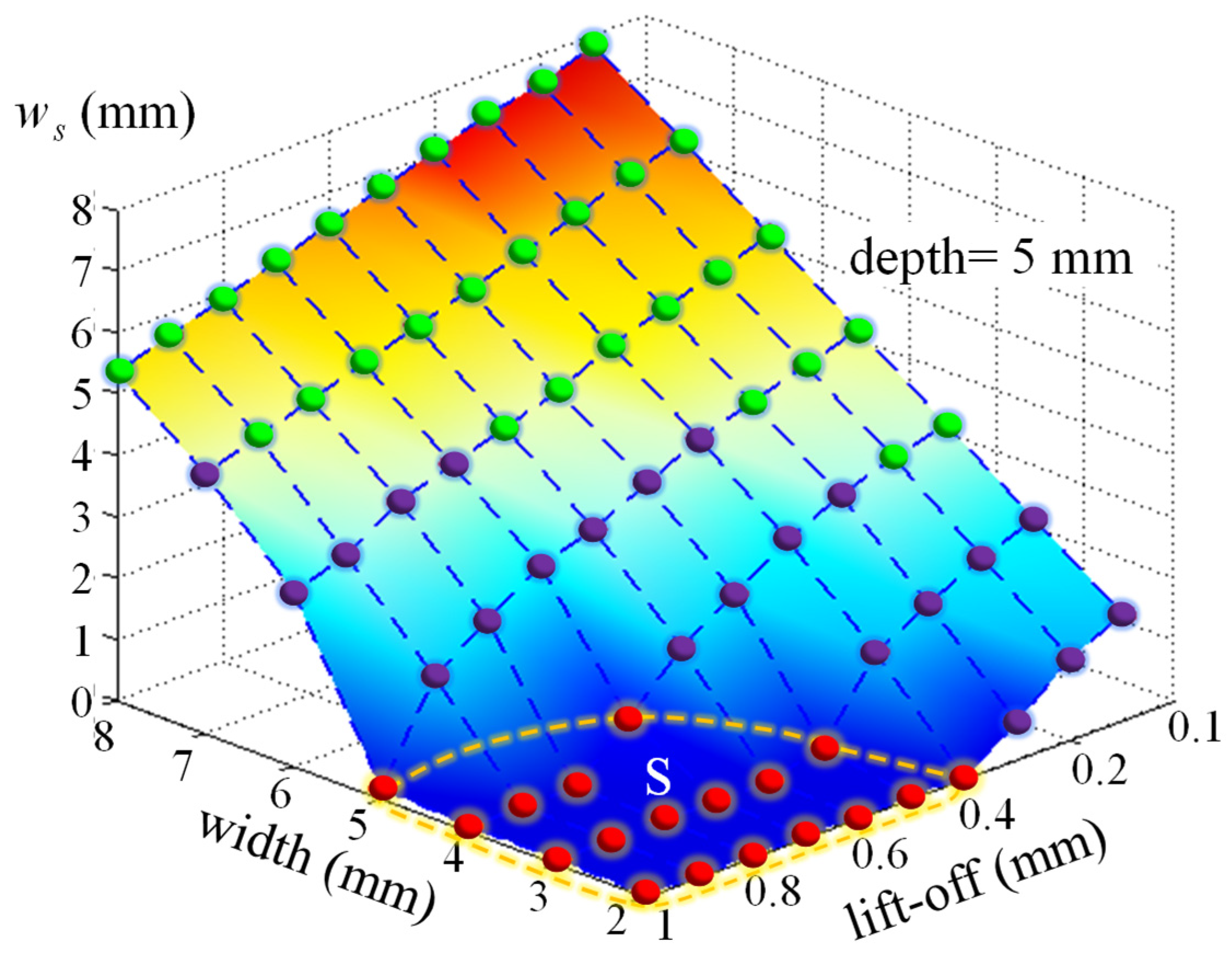
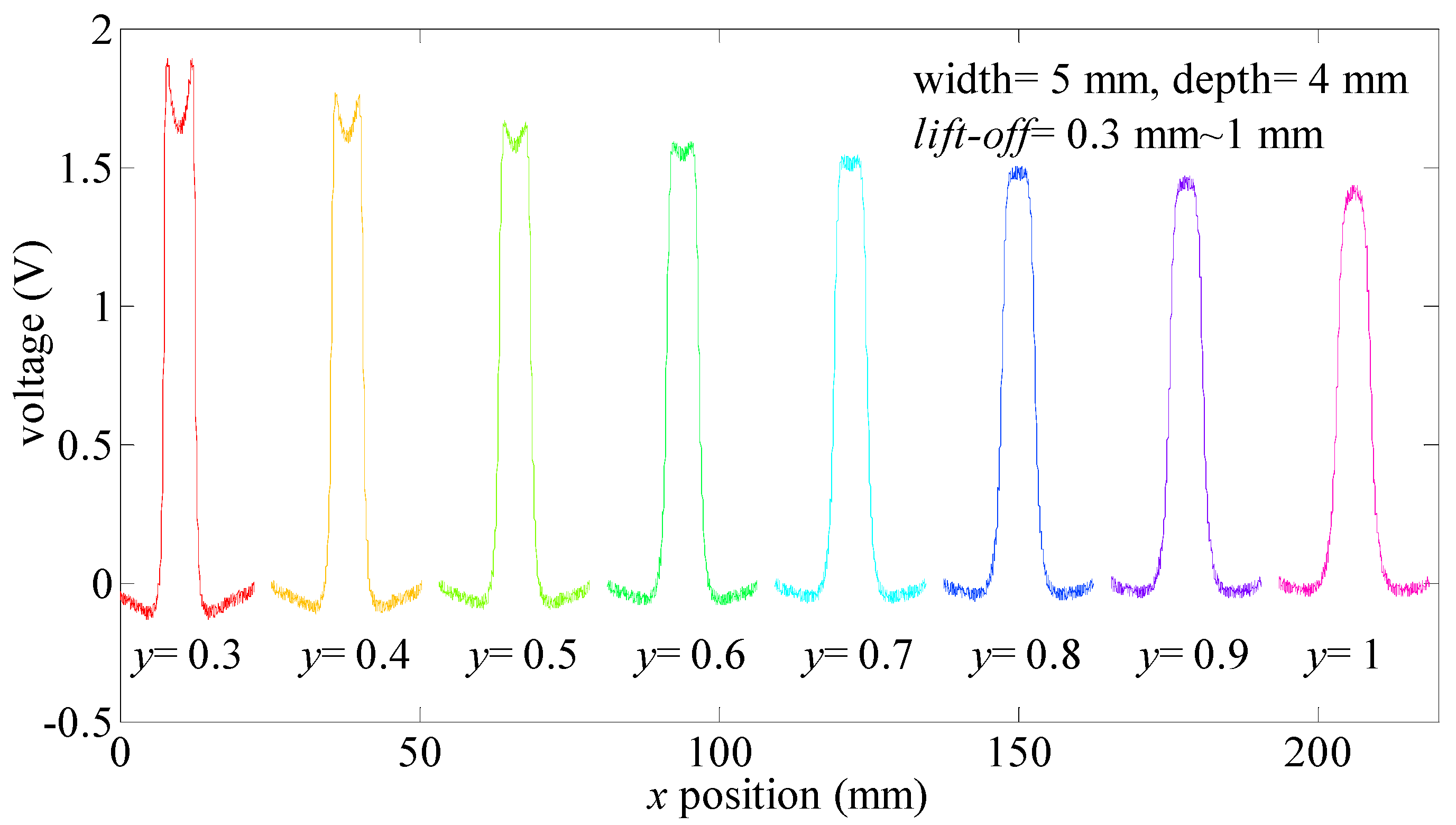
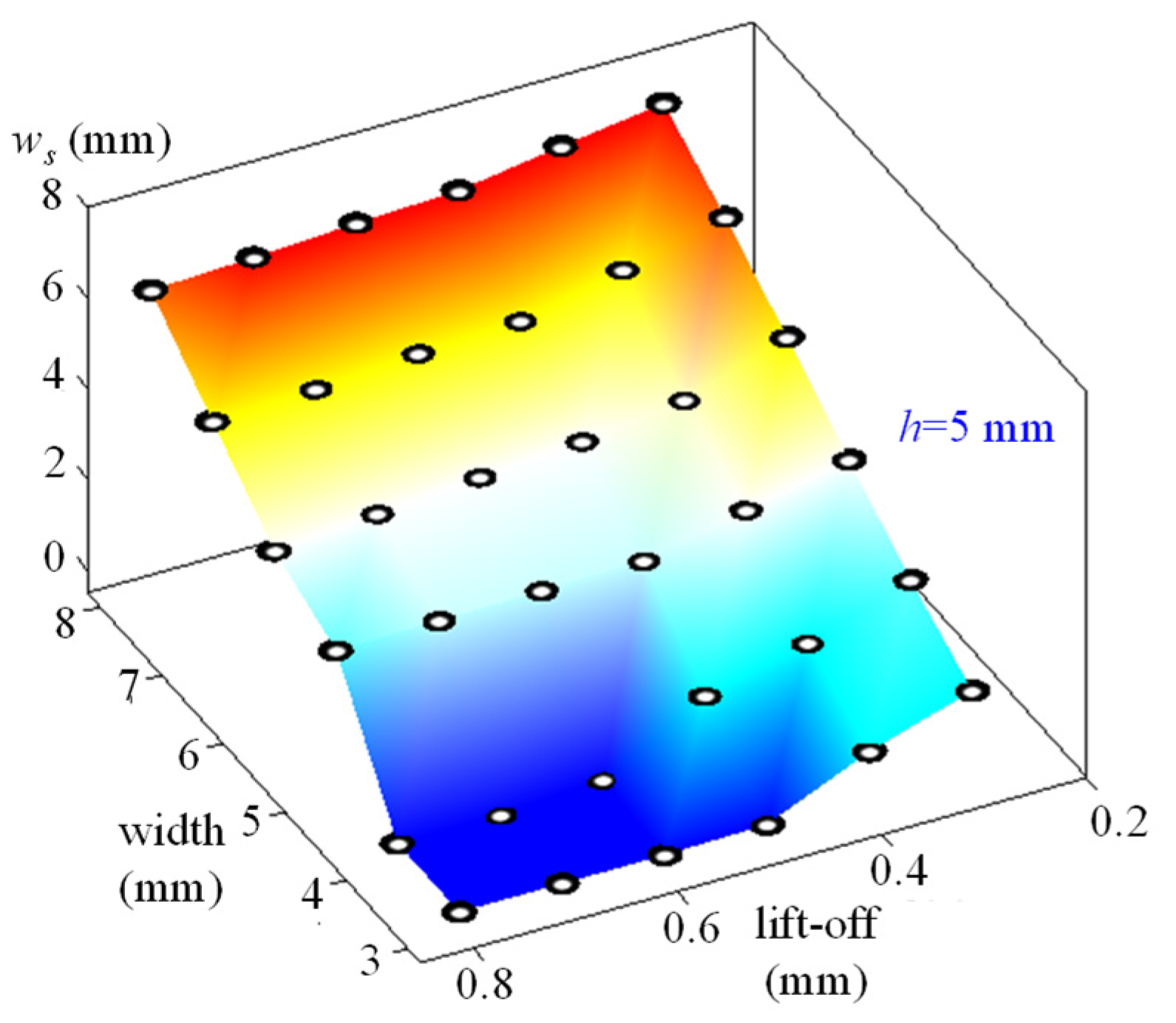
4.3. Relationship between ws, Defect Width, and Lift-off Values
4.4. Advantages and Disadvantages of the Proposed Method
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jin, Z.; Mohd Noor Sam, M.A.I.; Oogane, M.; Ando, Y. Serial MTJ-Based TMR Sensors in Bridge Configuration for Detection of Fractured Steel Bar in Magnetic Flux Leakage Testing. Sensors 2021, 21, 668. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.D.; Gu, Y.; Wang, Y.S. A review of three magnetic ndt technologies. J. Magn. Magn. Mater. 2012, 324, 382–388. [Google Scholar] [CrossRef]
- Li, E.; Wang, J.; Wu, J.; Kang, Y. Spatial Spectrum-Based Measurement of the Surface Roughness of Ferromagnetic Components Using Magnetic Flux Leakage Method. IEEE Trans. Instrum. Meas. 2021, 70, 1–10. [Google Scholar]
- Li, E.; Kang, Y.; Tang, J.; Wu, J. A new micro magnetic bridge probe in magnetic flux leakage for detecting micro-cracks. J. Nondestruct. Eval. 2018, 37, 37–46. [Google Scholar] [CrossRef]
- Usarek, Z.; Warnke, K. Inspection of gas pipelines using magnetic flux leakage technology. Adv. Mater. Sci. 2017, 17, 37–45. [Google Scholar] [CrossRef] [Green Version]
- Sun, Y.; Liu, S.; He, L.; Kang, Y. A new detection sensor for wire rope based on open magnetization method. Mater. Eval. 2017, 75, 501–509. [Google Scholar]
- Pullen, A.L.; Charlton, P.C.; Pearson, N.R.; Whitehead, N.J. Magnetic flux leakage scanning velocities for tank floor inspection. IEEE Trans. Magn. 2018, 54, 1–8. [Google Scholar] [CrossRef]
- Li, E.; Kang, Y.; Tang, J.; Wu, J.; Yan, X. Analysis on Spatial Spectrum of Magnetic Flux Leakage Using Fourier Transform. IEEE Trans. Magn. 2018, 54, 1–10. [Google Scholar] [CrossRef]
- Wu, J.; Sun, Y.; Kang, Y.; Yang, Y. Theoretical Analyses of MFL Signal Affected by Discontinuity Orientation and Sensor-Scanning Direction. IEEE Trans. Magn. 2015, 51, 1–7. [Google Scholar]
- Han, W.; Shen, X.; Xu, J.; Wang, P.; Tian, G.Y.; Wu, Z. Fast estimation of defect profiles from the magnetic flux leakage signal based on a multi-power affine projection algorithm. Sensors 2014, 14, 16454–16466. [Google Scholar] [CrossRef] [Green Version]
- Ma, Q.; Tian, G.; Zeng, Y.; Li, R.; Song, H.; Wang, Z.; Gao, B.; Zeng, K. Pipeline In-Line Inspection Method, Instrumentation and Data Management. Sensors 2021, 21, 3862. [Google Scholar] [CrossRef]
- Du, Z.; Ruan, J.; Peng, Y.; Yu, S.; Zhang, Y.; Gan, Y.; Li, T. 3-D FEM Simulation of Velocity Effects on Magnetic Flux Leakage Testing Signals. IEEE Trans. Magn. 2008, 44, 1642–1645. [Google Scholar]
- Liu, J.; Fu, M.; Liu, F.; Feng, J.; Cui, K. Window Feature-Based Two-Stage Defect Identification Using Magnetic Flux Leakage Measurements. IEEE Trans. Instrum. Meas. 2018, 67, 12–23. [Google Scholar] [CrossRef]
- Feng, J.; Lu, S.; Liu, J.; Li, F. A Sensor Liftoff Modification Method of Magnetic Flux Leakage Signal for Defect Profile Estimation. IEEE Trans. Magn. 2017, 53, 1–13. [Google Scholar] [CrossRef]
- Priewald, R.H.; Magele, C.; Ledger, P.D.; Pearson, N.R.; Mason, J.S.D. Fast Magnetic Flux Leakage Signal Inversion for the Reconstruction of Arbitrary Defect Profiles in Steel Using Finite Elements. IEEE Trans. Magn. 2013, 49, 506–516. [Google Scholar] [CrossRef]
- Li, Y.; Wilson, J.; Tian, G.Y. Experiment and simulation study of 3D magnetic field sensing for magnetic flux leakage defect characterization. NDT&E Int. 2007, 40, 179–184. [Google Scholar]
- Liu, B.; Luo, N.; Feng, G. Quantitative Study on MFL Signal of Pipeline Composite Defect Based on Improved Magnetic Charge Model. Sensors 2021, 21, 3412. [Google Scholar] [CrossRef] [PubMed]
- Joshi, A. Wavelet transform and neural network based 3d defect characterization using magnetic flux leakage. Int. J. Appl. Electrom. 2008, 28, 149–153. [Google Scholar] [CrossRef]
- Li, M.; Lowther, D.A. The Application of Topological Gradients to Defect Identification in Magnetic Flux Leakage-Type NDT. IEEE Trans. Magn. 2010, 46, 3221–3224. [Google Scholar] [CrossRef]
- Mukherjee, D.; Saha, S.; Mukhopadhyay, S. Inverse mapping of magnetic flux leakage signal for defect characterization. NDT&E Int. 2013, 54, 198–208. [Google Scholar]
- Xu, C.; Wang, C.; Ji, F.; Yuan, X. Finite-Element Neural Network-Based Solving 3-D Differential Equations in MFL. IEEE Trans. Magn. 2012, 48, 4747–4756. [Google Scholar] [CrossRef]
- Christen, R.; Bergamini, A. Automatic flaw detection in NDE signals using a panel of neural networks. NDT&E Int. 2006, 39, 547–553. [Google Scholar]
- Joshi, A.; Udpa, L.; Udpa, S.; Tamburrino, A. Adaptive Wavelets for Characterizing Magnetic Flux Leakage Signals From Pipeline Inspection. IEEE Trans. Magn. 2006, 42, 3168–3170. [Google Scholar] [CrossRef]
- Ravan, M.; Amineh, R.K.; Koziel, S.; Nikolova, N.K.; Reilly, J.P. Sizing of 3-D Arbitrary Defects Using Magnetic Flux Leakage Measurements. IEEE Trans. Magn. 2010, 46, 1024–1033. [Google Scholar] [CrossRef]
- Minkov, D.; Takeda, Y.; Shoji, T.; Lee, J. Estimating the sizes of surface cracks based on Hall element measurements of the leakage magnetic field and a dipole model of a crack. Appl. Phys. A 2001, 74, 169–176. [Google Scholar] [CrossRef]
- Zhang, Y.; Sekine, K.; Watanabe, S. Magnetic leakage field due to sub-surface defects in ferromagnetic specimens. NDT&E Int. 1995, 28, 67–71. [Google Scholar]
- Philip, J.; Rao, C.B.; Jayakumar, T.; Raj, B. A new optical technique for detection of defects in ferromagnetic materials and components. NDT&E Int. 2000, 33, 289–295. [Google Scholar]
- Hosseingholizadeh, S.; Filleter, T.; Sinclair, A.N. Evaluation of a Magnetic Dipole Model in a DC Magnetic Flux Leakage System. IEEE Trans. Magn. 2019, 55, 1–7. [Google Scholar] [CrossRef]
- Edwards, C.; Palmer, S.B. The magnetic leakage field of surface-breaking cracks. J. Phys. D Appl. Phys. 1986, 19, 657–673. [Google Scholar] [CrossRef]
- Minkov, D.; Lee, J.; Shoji, T. Study of crack inversions utilizing dipole model of a crack and hall element measurements. J. Magn. Magn. Mater. 2000, 217, 207–215. [Google Scholar] [CrossRef]
- Sun, Y.; Liu, S.; Deng, Z.; Gu, M.; Liu, C.; He, L.; Kang, Y. New discoveries on electromagnetic action and signal presentation in magnetic flux leakage testing. J. Nondestruct. Eval. 2019, 38, 1–9. [Google Scholar] [CrossRef]
- Tehranchi, M.M.; Ranjbaran, M.; Eftekhari, H. Double core giant magneto-impedance sensors for the inspection of magnetic flux leakage from metal surface cracks. Sens. Actuat A Phys. 2011, 170, 55–61. [Google Scholar] [CrossRef]
- Li, Y.; Tian, G.Y.; Ward, S. Numerical simulation on magnetic flux leakage evaluation at high speed. NDT&E Int. 2006, 39, 367–373. [Google Scholar]
- Sun, Y.; Liu, S.; Ye, Z.; Chen, S.; Zhou, Q. A defect evaluation methodology based on multiple magnetic flux leakage (mfl) testing signal eigenvalues. Res. Nondestruct. Eval. 2015, 27, 1–25. [Google Scholar] [CrossRef]
- Huang, S.L.; Peng, L.; Wang, S.; Zhao, W. A Basic Signal Analysis Approach for Magnetic Flux Leakage Response. IEEE Trans. Magn. 2018, 54, 1–6. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| h (mm) | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| ws (mm) | 5.05 | 4.98 | 4.92 | 4.92 | 4.92 | 4.92 | 4.92 |
| ws (mm) | |||||||
|---|---|---|---|---|---|---|---|
| Lift-off (mm) | Depth (mm) | δ | |||||
| 2 | 3 | 5 | 6 | 7 | 8 | ||
| 0.1 | 4.77 | 4.77 | 4.77 | 4.77 | 4.77 | 4.77 | - |
| 0.2 | 5.02 | 5.02 | 5.02 | 5.02 | 5.02 | 5.02 | - |
| 0.3 | 5.17 | 5.17 | 5.17 | 5.17 | 5.17 | 5.17 | - |
| 0.4 | 5.17 | 5.17 | 5.15 | 5.15 | 5.15 | 5.15 | 0.39% |
| 0.5 | 5.05 | 4.98 | 4.92 | 4.92 | 4.92 | 4.92 | 2.57% |
| 0.6 | 4.92 | 4.79 | 4.79 | 4.73 | 4.69 | 4.69 | 4.90% |
| 0.7 | 4.79 | 4.67 | 4.54 | 4.41 | 4.41 | 4.41 | 7.93% |
| 0.8 | 4.67 | 4.41 | 4.16 | 4.03 | 4.03 | 4.03 | 13.70% |
| 0.9 | 4.41 | 4.14 | 3.50 | 3.42 | 3.42 | 3.42 | 22.45% |
| 1 | 4.29 | 3.46 | 3.42 | 3.42 | 3.42 | 3.42 | 20.28% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, E.; Chen, Y.; Chen, X.; Wu, J. Defect Width Assessment Based on the Near-Field Magnetic Flux Leakage Method. Sensors 2021, 21, 5424. https://doi.org/10.3390/s21165424
Li E, Chen Y, Chen X, Wu J. Defect Width Assessment Based on the Near-Field Magnetic Flux Leakage Method. Sensors. 2021; 21(16):5424. https://doi.org/10.3390/s21165424
Chicago/Turabian StyleLi, Erlong, Yiming Chen, Xiaotian Chen, and Jianbo Wu. 2021. "Defect Width Assessment Based on the Near-Field Magnetic Flux Leakage Method" Sensors 21, no. 16: 5424. https://doi.org/10.3390/s21165424