
ARMA-Based Segmentation of Human Limb Motion Sequences

Abstract
:1. Introduction
- Motion sequence downsampling is performed to compress the data given the observation that most of the motions are low frequency compared with the sampling rate.
- Limb bone partition angle based body structural representation is performed by calculating the angles between the limb bones partition to the central spine partition for more semantic description of motion state changes.
- ARMA modeling of separated limbs is performed based on the limb-bone partition angle representation and individual parameterization of each limb’s ARMA model.
- Determination of segmentation point is performed with a goodness-of-fit algorithm to find the point with large deviation between the fitting sequences and the measurement sequence of the ARMA model.
- Ensemble median filtering of segmentation result of each limb was performed to obtain the final segmentation results.
- Segment the motion sequence of a single motion type from the complex motion sequence.
- When there are redundant unknown motion sequences in the target motion sequence of a single action type, the unknown motion sequence can be separated from the target motion sequence to realize the cleaning of the motion sequence.
- Further subdivide the motion sequence of a single motion type, realize the fragmentation of a single motion type.
Innovation and Contribution
- We propose an autoregressive moving average (ARMA)-model-based segmentation method with a limb-bone partition angle based human body structural representation model. The ARMA-model-based segmentation algorithm is capable of analyzing and segmenting motion sequences without a large number of training data, neither does it depend on the type of motion sequences. The algorithm is then considered as robust to unknown motion sequences, which largely improves the segmentation efficiency and reduces time consumption of the algorithm tuning.
- We combine two algorithms for limb-bone partition angle characterization and the ARMA model fitting. Given that the ARMA model is suitable for short-term prediction of motion sequence, we determine that the deviation between the predicted value and the actual value of the limb motion sequence inflection point after the ARMA model fitting becomes larger via the fitness algorithm, and this is used to calculate the segmentation points.
- To design and evaluate the proposed segmentation algorithm, MoCap data [3] are measured on four subjects, including one female (165 cm) and three males (170∼180 cm). The MoCap data are collected by an IMU MoCap equipment of model Perception Neuron Pro by the Noitom Inc. Block A, Putian Desheng, No. 28, Xinjiekou outer street, Xicheng District, Beijing.
2. Related Work
3. Model of Skeleton and Acquisition of Limb-Bone Partition Angle Sequences
3.1. Structural Representation of Human Body
3.2. Data Availability Statement
3.3. Data Structure of BVH Files and Data Decomposition
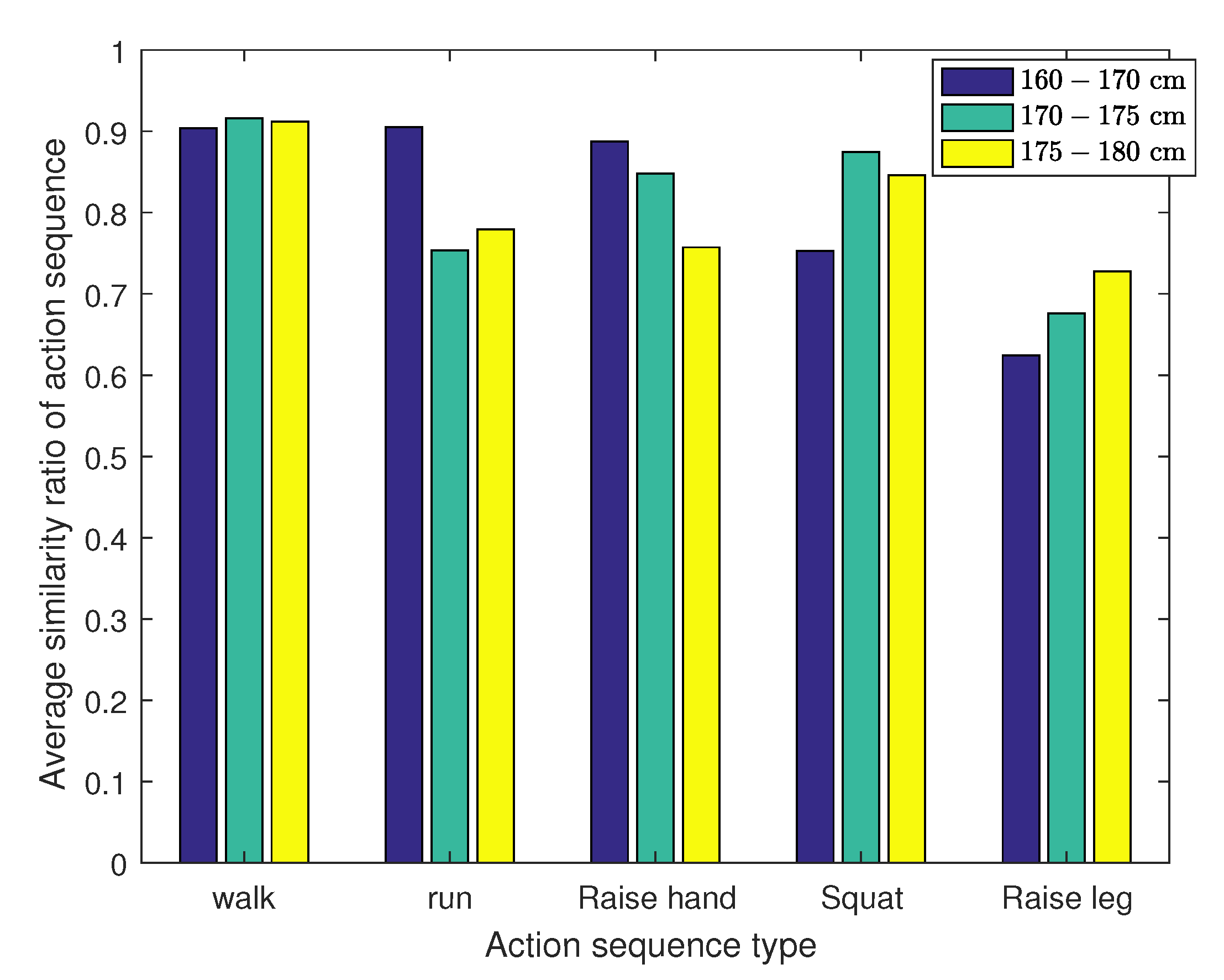
3.4. Statistical Analysis of Data
4. ARMA Modeling of Limb-Bone Partition Angle Motion Sequence
4.1. Transformation between ARMA Model and Motion Feature Model
4.2. Stationarity Test of Characteristic Sequence of Angle between Limb-Bone Partition Segments
4.3. Analysis of ARMA Modeling on Limb-Bone Partition Angle Sequences
4.4. Parameter Estimation of ARMA Model with Angle Feature of Each Limb-Bone Partition
4.5. Residual Sequence Test for ARMA Model of Limb-Bones Partition Angle
4.6. ARMA Model Order Selection of Limb-Bones Partition Angle Based on Particle Swarm Optimization Algorithm
5. Construction of Segmentation Function for ARMA Model of Limb-Bone Partition Angle Sequence
5.1. Motion Sequence Data Type Selection
5.2. Selection of Segmentation Windows
5.3. Finding Segmentation Points of ARMA Model Based on Angle Feature of Limbs Bone Partition
5.4. Convergence Demonstration
6. Experimental Results and Analysis
6.1. Data Downsampling
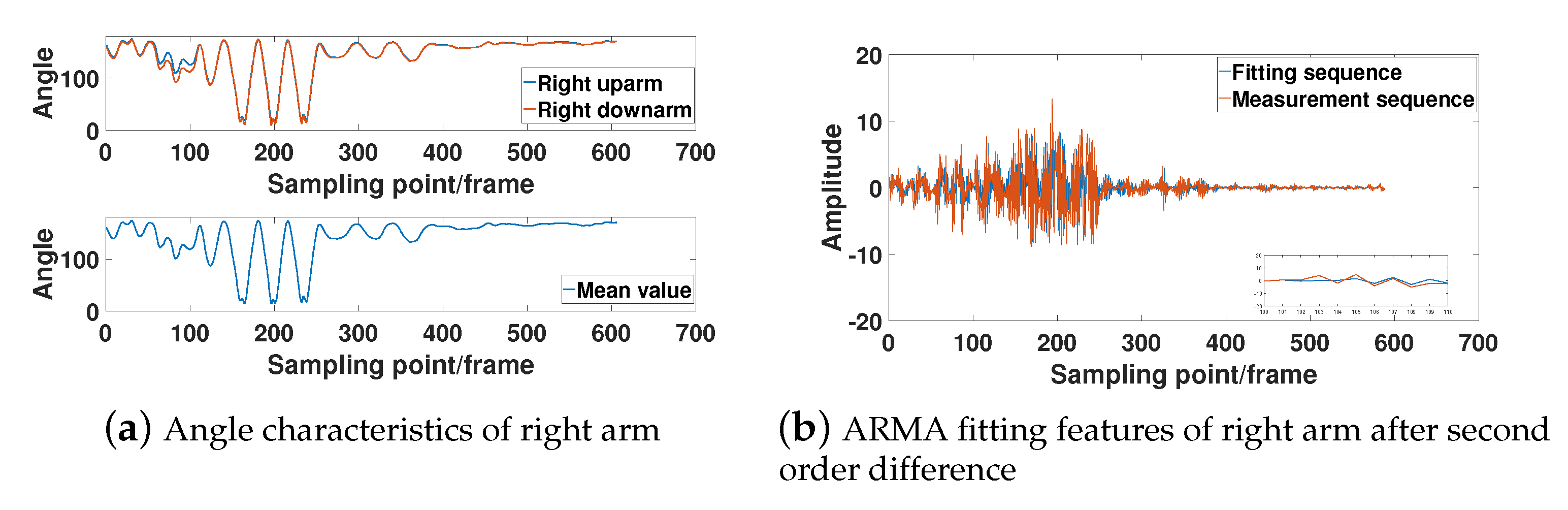
6.2. Analysis of Angle Characteristics of Limb Segments Fitted by ARMA Model
6.3. Segmentation Determination
6.4. Analysis of Average Segmentation Accuracy and Average Calculation Time
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shiratori, T.; Nakazawa, A.; Ikeuchi, K. Rhythmic motion analysis using motion capture and musical information. In Proceedings of the IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems, MFI2003, Tokyo, Japan, 1 August 2003; pp. 89–94. [Google Scholar] [CrossRef] [Green Version]
- Barbic, J.; Safonova, A.; Pan, J.Y.; Faloutsos, C.; Hodgins, J.; Pollard, N. Segmenting Motion Capture Data into Distinct Behaviors. In Proceedings of the Graphics Interface, London, ON, Canada, 17–19 May 2004; Volume 2004, pp. 185–194. [Google Scholar]
- Liu, L.; Mei, F.; Hu, Q.; Yang, C. ARMA Based Segmentation of Human Limb Motion Sequences. 2021. Available online: https://github.com/meifeng3/Mocap-data-collected-from-4-subjects (accessed on 13 August 2021).
- Endres, D.; Christensen, A.; Omlor, L.; Giese, M. Emulating Human Observers with Bayesian Binning: Segmentation of Action Streams. TAP 2011, 8, 16. [Google Scholar] [CrossRef]
- Wang, Y.; Lin, X.; Wu, L.; Zhang, W. Robust Subspace Clustering for Multi-view Data by Exploiting Correlation Consensus. IEEE Trans. Image Process. 2015. accepted to appear. [Google Scholar] [CrossRef] [PubMed]
- Zhou, F.; De la Torre, F.; Hodgins, J. Aligned Cluster Analysis for Temporal Segmentation of Human Motion. In Proceedings of the 2008 8th IEEE International Conference on Automatic Face & Gesture Recognition, Amsterdam, The Netherlands, 17–19 September 2008; pp. 1–7. [Google Scholar] [CrossRef]
- Zhou, F.; De la Torre, F.; Hodgins, J.K. Hierarchical Aligned Cluster Analysis for Temporal Clustering of Human Motion. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 582–596. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Peng, S. Motion Segmentation Using Central Distance Features and Low-Pass Filter. In Proceedings of the 2010 International Conference on Computational Intelligence and Security, Nanning, China, 11–14 December 2010; pp. 223–226. [Google Scholar] [CrossRef]
- Devanne, M.; Wannous, H.; Pala, P.; Berretti, S.; Daoudi, M.; Del Bimbo, A. Combined shape analysis of human poses and motion units for action segmentation and recognition. In Proceedings of the 2015 11th IEEE International Conference and Workshops on Automatic Face and Gesture Recognition (FG), Ljubljana, Slovenia, 4–8 May 2015; Volume 7, pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Devanne, M.; Berretti, S.; Pala, P.; Wannous, H.; Daoudi, M.; Del Bimbo, A. Motion Segment Decomposition of RGB-D Sequences for Human Behavior Understanding. Pattern Recognit. 2016, 61, 222–233. [Google Scholar] [CrossRef] [Green Version]
- Gong, D.; Medioni, G.; Zhao, X. Structured Time Series Analysis for Human Action Segmentation and Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 1414–1427. [Google Scholar] [CrossRef] [PubMed]
- Bouchard, D.; Badler, N. Semantic Segmentation of Motion Capture Using Laban Movement Analysis. In Intelligent Virtual Agents; Springer: Berlin/Heidelberg, Germany, 2007; Volume 4722, pp. 37–44. [Google Scholar] [CrossRef] [Green Version]
- Pradhan, G.; Li, C.; Prabhakaran, B. Hierarchical Indexing Structure for 3D Human Motions. In Advances in Multimedia Modeling; Springer: Berlin/Heidelberg, Germany, 2007; Volume 4351, pp. 386–396. [Google Scholar] [CrossRef]
- Xia, G.; Sun, H.; Feng, L.; Zhang, G.; Liu, Y. Human Motion Segmentation via Robust Kernel Sparse Subspace Clustering. IEEE Trans. Image Process. 2018, 27, 135–150. [Google Scholar] [CrossRef] [PubMed]
- Kruger, B.; Vogele, A.; Willig, T.; Yao, A.; Klein, R.; Weber, A. Efficient Unsupervised Temporal Segmentation of Motion Data. IEEE Trans. Multimed. 2017, 19, 797–812. [Google Scholar] [CrossRef] [Green Version]
- Yu, X.; Liu, W.; Xing, W. Behavioral segmentation for human motion capture data based on graph cut method. J. Vis. Lang. Comput. 2017, 43, 50–59. [Google Scholar] [CrossRef]
- Zan, X.; Liu, W.; Xing, W. A Framework for Human Motion Segmentation Based on Multiple Information of Motion Data. KSII Trans. Internet Inf. Syst. 2019, 13, 4624–4644. [Google Scholar]
- Al-Azzawi, N.A. Human Action Recognition based on Hybrid Deep Learning Model and Shearlet Transform. In Proceedings of the 2020 12th International Conference on Information Technology and Electrical Engineering (ICITEE), Yogyakarta, Indonesia, 6–8 October 2020; pp. 152–155. [Google Scholar] [CrossRef]
- Yi, L.; Huang, H.; Liu, D.; Kalogerakis, E.; Su, H.; Guibas, L. Deep Part Induction from Articulated Object Pairs. ACM Trans. Graph. 2018, 37, 209. [Google Scholar] [CrossRef] [Green Version]
- Tzirakis, P.; Nicolaou, M.A.; Schuller, B.; Zafeiriou, S. Time-series Clustering with Jointly Learning Deep Representations, Clusters and Temporal Boundaries. In Proceedings of the 2019 14th IEEE International Conference on Automatic Face Gesture Recognition (FG 2019), Lille, France, 14–18 May 2019; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Ruan, R.; Liu, X.; Wu, X. Action Recognition Method for Multi-joint Industrial Robots Based on End-arm Vibration and BP Neural Network. In Proceedings of the 2021 6th International Conference on Control and Robotics Engineering (ICCRE), Beijing, China, 16–18 April 2021; pp. 13–17. [Google Scholar] [CrossRef]
- Ebeweuter, N. Dance movement: A focus on the technology. IEEE Comput. Graph. Appl. 2005, 25, 80–83. [Google Scholar] [CrossRef] [PubMed]
- Lu, J.c.; Zhang, X.; Sun, W. A Real-time Adaptive Forecasting Algorithm for Electric Power Load. In Proceedings of the 2005 IEEE/PES Transmission & Distribution Conference & Exposition: Asia and Pacific, Dalian, China, 18 August 2005; Volume 2005, pp. 1–5. [Google Scholar] [CrossRef]
- Choi, W.; Cho, J.; Lee, S.; Jung, Y. Fast Constrained Dynamic Time Warping for Similarity Measure of Time Series Data. IEEE Access 2020, 8, 222841–222858. [Google Scholar] [CrossRef]
- Tran, N. Automatic ARIMA Time Series Modeling and Forecasting for Adaptive Input/Output Prefetching; University of Illinois at Urbana-Champaign: Champaign, IL, USA, 2002. [Google Scholar]
- Kalpakis, K.; Gada, D.; Puttagunta, V. Distance measures for effective clustering of ARIMA time-series. In Proceedings of the 2001 IEEE International Conference on Data Mining, San Jose, CA, USA, 29 November–2 December 2001; pp. 273–280. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Liang, J.; Che, J.; Sun, D. ARMA Model identification using Particle Swarm Optimization Algorithm. In Proceedings of the 2008 International Conference on Computer Science and Information Technology, Singapore, 29 August–2 September 2008; pp. 223–227. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Segmentation Algorithm | References | Strengths | Weaknesses |
|---|---|---|---|
| Statistical characteristics | [4,5,6,7] | 1. It can make full use of the data contained in the sequence. 2. The segmented sequence has strong semantics. | 1. A large sample of data is needed to describe it. 2. Relying too much on statistical results. |
| Geometric characteristics | [8,9,10] | 1. The algorithm structure is relatively simple and easy to extend. | 1. The segmented sequence may lack action semantics. |
| Deep learning and machine learning | [11,12,13,14,15,16,17,18,19,20,21] | 1. These methods can be trained to extract motion segments with high precision and speed. 2. By enhancing the quality of training samples, the semantic features of segmentation results can be improved. | 1. A large number of training samples are required. 2. Such algorithms usually require a training step. The training phase highly affects the performance of these methods. |
| Low Limbs | Upper Limbs |
|---|---|
| : RHI to RK → Central | : RUA to RDA → Central |
| : RK to RA → Central | : RDA to RH → Central |
| : LHI to LK → Central | : LUA to LDA → Central |
| : LK to LA → Central | : LDA to LH → Central |
| Central bone: R → S |
| Low Limbs | Upper Limbs |
|---|---|
| : Right leg → Central | : Right arm → Central |
| : Left leg → Central | : Right arm → Central |
| Central spine: R → S |
| Height (cm) | Number of Frames | Sequence Time Length (s) |
|---|---|---|
| 165 | 2446∼2774 | 24.5∼27.7 |
| 170 | 2888∼3256 | 28.8∼32.6 |
| 175 | 2740∼2880 | 27.4∼28.8 |
| 180 | 2860∼3044 | 28.6∼30.4 |
| Bone Direction Vector | Limb-Bone Partition Angle Sequences |
|---|---|
| Algorithm Type | Time (s) |
|---|---|
| ARMA-PSO | |
| ARMA | |
| BP-net | |
| PCA | |
| K-means |
| Height (cm) | ARMA | BP-Net | PCA | K-Means |
|---|---|---|---|---|
| 165 | ||||
| 170 | ||||
| 175 | ||||
| 180 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mei, F.; Hu, Q.; Yang, C.; Liu, L. ARMA-Based Segmentation of Human Limb Motion Sequences. Sensors 2021, 21, 5577. https://doi.org/10.3390/s21165577
Mei F, Hu Q, Yang C, Liu L. ARMA-Based Segmentation of Human Limb Motion Sequences. Sensors. 2021; 21(16):5577. https://doi.org/10.3390/s21165577
Chicago/Turabian StyleMei, Feng, Qian Hu, Changxuan Yang, and Lingfeng Liu. 2021. "ARMA-Based Segmentation of Human Limb Motion Sequences" Sensors 21, no. 16: 5577. https://doi.org/10.3390/s21165577
APA StyleMei, F., Hu, Q., Yang, C., & Liu, L. (2021). ARMA-Based Segmentation of Human Limb Motion Sequences. Sensors, 21(16), 5577. https://doi.org/10.3390/s21165577