
Transcending Conventional Biometry Frontiers: Diffusive Dynamics PPG Biometry

 , , and
, , and
Abstract
:1. Introduction
1.1. PPG Biometric System—State of the Art
1.2. PPG Biometric System—Proposal
2. Method
2.1. 0–1 Test
2.2. Classifier
Architecture
- Use of factoring methods to reduce the computational complexity of the convolutions used [63].
- Use of residual connections between the inputs and outputs of the blocks used [64]. These connections prevent the loss of information and improve the stability of the gradients when training.
- Use of batch normalization to immunize the network to some extent against scale changes, reduce training time, and avoid covariance displacement [65].
3. Material and Methodology
3.1. Preprocessing
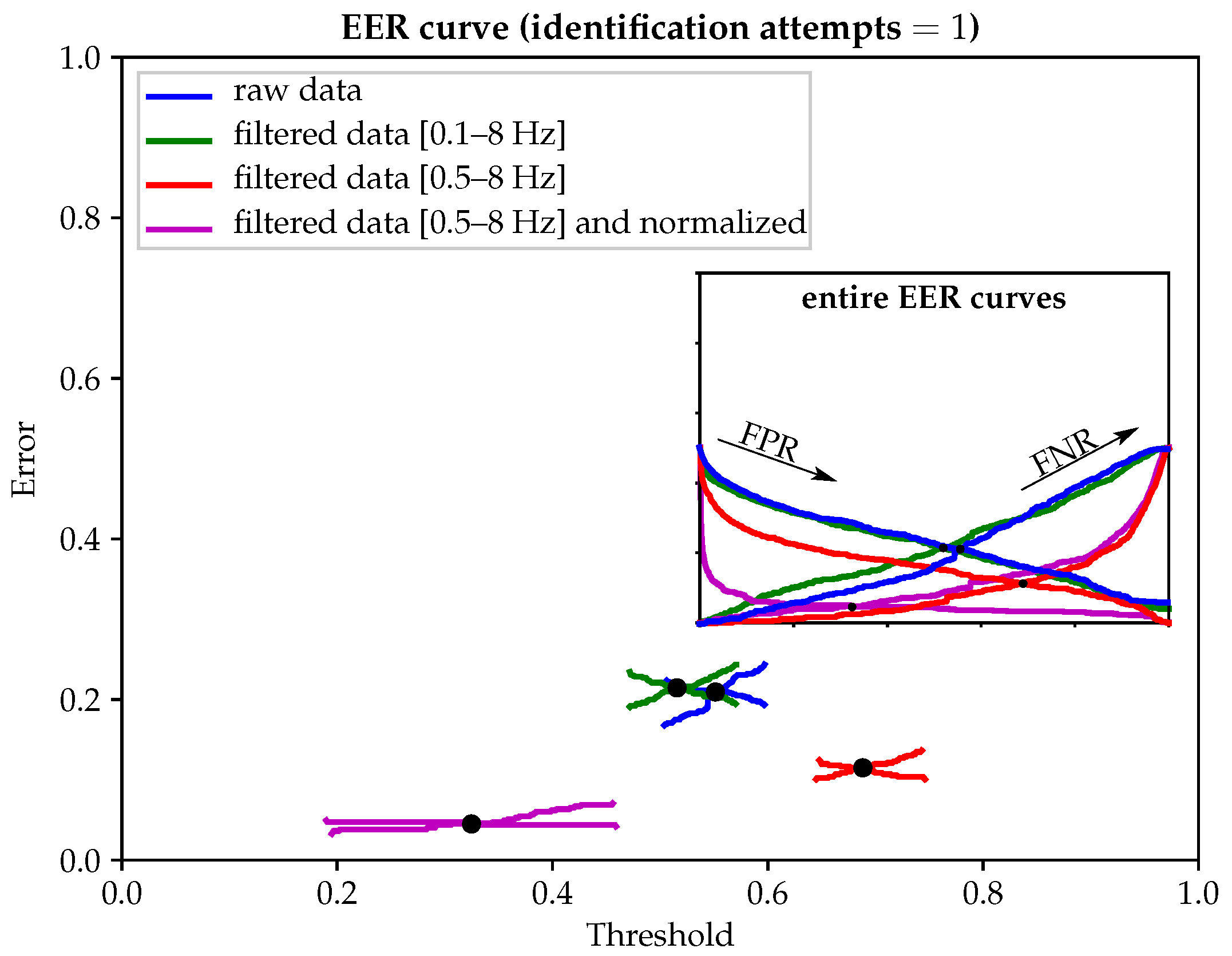
- Raw data: in this first mode, the PPG signals are not preprocessed and transferred directly, as they were acquired, to the 0–1 test preprocessing layer (see Figure 2), where once segmented, they convert to diffusive geometric maps.
- Filtered data [0.1–8 Hz]: in this second mode, the PPG signals, before moving to the 0–1 test preprocessing layer, are filtered with a Butterworth bandpass filter with cutoff frequencies at 0.1 and 8 Hz, and the amplitudes are not normalized.
- Filtered data [0.5–8 Hz]: in this third mode, the PPG signals, before moving to the 0–1 test preprocessing layer, are filtered with a Butterworth bandpass filter with cutoff frequencies at 0.5 and 8 Hz, and the amplitudes are not normalized.
- Filtered data [0.5–8 Hz] and normalized: in the latter mode, the PPG signals, before moving to the 0–1 test preprocessing layer, are filtered with a Butterworth bandpass filter with cutoff frequencies at 0.5 and 8 Hz, and the amplitudes normalized to the interval.
3.2. Training
3.3. Optimizer
3.4. Loss Function
3.5. Metrics
- Precision-Recall curve. The precision-recall curve depicts the precision vs. the sensitivity (recall) for different operating points (matching score or threshold values). The closer the curve is to the upper right corner (the area under the curve is closer to 1), the more precise and sensitive the system behaves. The accuracy evaluates how often the output is correct (positive). An accurate system is very finicky, validating a legitimate user, i.e., in an accurate system, it is unlikely that an intrusive user will be admitted as valid, but it is also possible that legitimate users will be rejected (false negatives). Sensitivity assesses how permissive the system is, i.e., in a highly sensitive system, it is improbable that a valid user will be rejected, but it is also possible that unregistered users will be admitted as valid (false positives).
- ROC (Receiver Operating Characteristic) curve. The ROC curve depicts sensitivity vs. FPR (false positive rate). The closer the curve is to the upper left corner (the area under the curve is closer to 1), the more sensitive the system behaves without increasing FPR. In short, the ROC curve graphically represents TPR (true positive rate) vs. FPR (false positive rate) for different operating points (matching score or threshold values).
- F score–threshold curve. The F score–threshold curve complements the information provided by the precision-recall curve. F score is a joint and overall metric that brings together the precision and recall values in a unique metric (precision and recall harmonic mean) that allows us to estimate the stability of the system’s performance for different threshold values. In a stable and high-performance system, the range of threshold values for which the curve remains almost constant and close to 1 is virtually a flat line over the whole range.
- Equal Error Rate (EER). The equal error rate or crossover error rate (CER) is a metric concerning biometric authentication systems that determines a working threshold where FPR (false positive rate) and FNR (false negative rate) are the same. The point where these decision errors cross defines the working point, and the lower the crossover rate, the higher the system’s accuracy. At the experimental level, EER is used as a metric to compare different biometric authentication techniques.
4. Results and Discussion
4.1. Experimental Conditions
4.1.1. Leaving 40% of Users out of Training
4.1.2. Leaving 40% of Data out of Training
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Velikic, G.S.; Todorovic, B.M.; Kukolj, D. Post COVID-19 Thoughts: Controversies and Merits of the Technology Progress. IEEE Consum. Electron. Mag. 2020, 9, 92–94. [Google Scholar] [CrossRef]
- Dynkin, A.A.; Telegina, E.A. Pandemic Shock and the World after Crisis. World Econ. Int. Relat. 2020, 64, 5–16. [Google Scholar] [CrossRef]
- Wang, B.; Schlagwein, D.; Cecez-Kecmanovic, D.; Cahalane, M.C. Editorial: Beyond the Factory Paradigm: Digital Nomadism and the Digital Future(s) of Knowledge Work Post-COVID-19. J. Assoc. Inf. Syst. 2020, 21. [Google Scholar] [CrossRef]
- Singh, M.; Singh, R.; Ross, A. A comprehensive overview of biometric fusion. Inf. Fusion 2019, 52, 187–205. [Google Scholar] [CrossRef]
- Sancho, J.; Alesanco, Á.; García, J. Biometric Authentication Using the PPG: A Long-Term Feasibility Study. Sensors 2018, 18, 1525. [Google Scholar] [CrossRef] [Green Version]
- Gelb, A.; Clark, J. Identification for Development: The Biometrics Revolution. SSRN Electron. J. 2013. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Wang, Y.; Chen, Y.; Liu, H.; Liu, J. User authentication on mobile devices: Approaches, threats and trends. Comput. Netw. 2020, 170, 107118. [Google Scholar] [CrossRef]
- Sanchez-Reillo, R.; Sanchez-Avila, C.; Gonzalez-Marcos, A. Biometric identification through hand geometry measurements. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1168–1171. [Google Scholar] [CrossRef] [Green Version]
- Sun, Y.; Lo, B. An Artificial Neural Network Framework for Gait-Based Biometrics. IEEE J. Biomed. Health Informat. 2019, 23, 987–998. [Google Scholar] [CrossRef] [Green Version]
- Jiang, X.; Xu, K.; Liu, X.; Dai, C.; Clifton, D.; Clancy, E.A.; Akay, M.; Chen, W. Cancelable HD-sEMG-based Biometrics for Cross-Application Discrepant Personal Identification. IEEE J. Biomed. Health Informat. 2020, 25, 1170–1179. [Google Scholar] [CrossRef]
- Moraes, J.; Rocha, M.; Vasconcelos, G.; Filho, J.V.; de Albuquerque, V.; Alexandria, A. Advances in Photopletysmography Signal Analysis for Biomedical Applications. Sensors 2018, 18, 1894. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Elgendi, M. Standard Terminologies for Photoplethysmogram Signals. Curr. Cardiol. Rev. 2012, 8, 215–219. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hertzman, A.B. Photoelectric Plethysmography of the Fingers and Toes in Man. Exp. Biol. Med. 1937, 37, 529–534. [Google Scholar] [CrossRef]
- Castaneda, D.; Esparza, A.; Ghamari, M.; Soltanpur, C.; Nazeran, H. A review on wearable photoplethysmography sensors and their potential future applications in health care. Int. J. Biosens. Bioelectron. 2018, 4, 195–202. [Google Scholar] [PubMed] [Green Version]
- Peart, D.J.; Balsalobre-Fernández, C.; Shaw, M.P. Use of Mobile Applications to Collect Data in Sport, Health, and Exercise Science: A Narrative Review. J. Strength Cond. Res. 2018, 33, 1167–1177. [Google Scholar] [CrossRef] [PubMed]
- Allen, J. Photoplethysmography and its application in clinical physiological measurement. Physiol. Meas. 2007, 28, R1–R39. [Google Scholar] [CrossRef] [Green Version]
- Elgendi, M. On the Analysis of Fingertip Photoplethysmogram Signals. Curr. Cardiol. Rev. 2012, 8, 14–25. [Google Scholar] [CrossRef]
- Sviridova, N.; Sakai, K. Application of photoplethysmogram for detecting physiological effects of tractor noise. Eng. Agric. Environ. Food 2015, 8, 313–317. [Google Scholar] [CrossRef]
- Yadav, U.; Abbas, S.N.; Hatzinakos, D. Evaluation of PPG Biometrics for Authentication in Different States. In Proceedings of the 2018 International Conference on Biometrics (ICB), Gold Coast, QLD, Australia, 20–23 February 2018. [Google Scholar] [CrossRef] [Green Version]
- Webster, J.G. Design of Pulse Oximeters; Series in Medical Physics and Biomedical Engineering; CRC Press: Boca Raton, FL, USA, 1997. [Google Scholar]
- Dhar, S.; Mukhopadhyay, S.; Pal, S.; Mitra, M. An efficient data compression and encryption technique for PPG signal. Measurement 2018, 116, 533–542. [Google Scholar] [CrossRef]
- Meredith, D.J.; Clifton, D.; Charlton, P.; Brooks, J.; Pugh, C.W.; Tarassenko, L. Photoplethysmographic derivation of respiratory rate: A review of relevant physiology. J. Med. Eng. Technol. 2011, 36, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Paulsen, C.; Byers, R. Glossary of Key Information Security Terms; Technical Report; Computer Security Division, Information Technology Laboratory; National Institute of Standards and Technology (NIST): Gaithersburg, MD, USA, 2019. [CrossRef]
- Liu, H.; Zhu, X.; Lei, Z.; Li, S.Z. AdaptiveFace: Adaptive Margin and Sampling for Face Recognition. 2019. Available online: https://openaccess.thecvf.com/content_CVPR_2019/html/Liu_AdaptiveFace_Adaptive_Margin_and_Sampling_for_Face_Recognition_CVPR_2019_paper.html (accessed on 20 August 2021).
- Yin, X.; Zhu, Y.; Hu, J. 3D Fingerprint Recognition based on Ridge-valley-guided 3D Reconstruction and 3D Topology Polymer Feature Extraction. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 43, 1085–1091. [Google Scholar] [CrossRef]
- Jain, A.; Ross, A.; Prabhakar, S. An Introduction to Biometric Recognition. IEEE Trans. Circuits Syst. Video Technol. 2004, 14, 4–20. [Google Scholar] [CrossRef] [Green Version]
- Teoh, A.B.J.; Leng, L. Special Issue on Advanced Biometrics with Deep Learning. Appl. Sci. 2020, 10, 4453. [Google Scholar] [CrossRef]
- Rajeev, S.; Shreyas, K.K.M.; Panetta, K.; Agaian, S. 3-D palmprint modeling for biometric verification. In Proceedings of the 2017 IEEE International Symposium on Technologies for Homeland Security (HST), Waltham, MA, USA, 25–26 April 2017; pp. 1–6. [Google Scholar]
- Zhang, J.; Yu, W.; Yang, X.; Deng, F. Few-Shot Learning for Ear Recognition. In Proceedings of the 2019 International Conference on Image, Video and Signal Processing, New York, NY, USA, 29–31 October 2019; IVSP 2019. pp. 50–54. [Google Scholar] [CrossRef]
- Wang, K.; Kumar, A. Cross-spectral iris recognition using CNN and supervised discrete hashing. Pattern Recognit. 2019, 86, 85–98. [Google Scholar] [CrossRef]
- Dharwadkar, S.N.; Anant, R.P. Combining eye based features for biometric system. In Proceedings of the 2015 International Conference on Information Processing (ICIP), Pune, India, 16–19 December 2015; pp. 409–413. [Google Scholar]
- Liang, J.; Wang, J.; Quan, Y.; Chen, T.; Liu, J.; Ling, H.; Xu, Y. Recurrent Exposure Generation for Low-Light Face Detection. arXiv 2020, arXiv:2007.10963. [Google Scholar]
- Liu, C.; Ruan, S.; Lai, Y.; Yao, C. Finger-Vein as a Biometric-Based Authentication. IEEE Consum. Electron. Mag. 2019, 8, 29–34. [Google Scholar] [CrossRef]
- Garcia-Martin, R.; Sanchez-Reillo, R. Vein Biometric Recognition on a Smartphone. IEEE Access 2020, 8, 104801–104813. [Google Scholar] [CrossRef]
- Kumar, A.; Kwong, C. Towards Contactless, Low-Cost and Accurate 3D Fingerprint Identification. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013. [Google Scholar] [CrossRef]
- Singh, Y.N.; Singh, S.K.; Ray, A.K. Bioelectrical Signals as Emerging Biometrics: Issues and Challenges. ISRN Signal Process. 2012, 2012, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Pal, A.; Gautam, A.K.; Singh, Y.N. Evaluation of Bioelectric Signals for Human Recognition. Procedia Comput. Sci. 2015, 48, 746–752. [Google Scholar] [CrossRef] [Green Version]
- Blasco, J.; Chen, T.M.; Tapiador, J.; Peris-Lopez, P. A Survey of Wearable Biometric Recognition Systems. ACM Comput. Surv. 2016, 49, 1–35. [Google Scholar] [CrossRef]
- Kim, C.I.; Lee, J.H. The non-contact biometric identified bio signal measurement sensor and algorithms. Technol. Health Care 2018, 26, 215–228. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pisani, P.H.; Mhenni, A.; Giot, R.; Cherrier, E.; Poh, N.; de Leon Ferreira de Carvalho, A.C.P.; Rosenberger, C.; Amara, N.E.B. Adaptive Biometric Systems. ACM Comput. Surv. 2019, 52, 1–38. [Google Scholar] [CrossRef]
- Biswas, D.; Everson, L.; Liu, M.; Panwar, M.; Verhoef, B.E.; Patki, S.; Kim, C.H.; Acharyya, A.; Hoof, C.V.; Konijnenburg, M.; et al. CorNET: Deep Learning Framework for PPG-Based Heart Rate Estimation and Biometric Identification in Ambulant Environment. IEEE Trans. Biomed. Circuits Syst. 2019, 13, 282–291. [Google Scholar] [CrossRef]
- Gu, Y.; Zhang, Y.; Zhang, Y. A novel biometric approach in human verification by photoplethysmographic signals. In Proceedings of the 4th International IEEE EMBS Special Topic Conference on Information Technology Applications in Biomedicine, Birmingham, UK, 24–26 April 2003. [Google Scholar] [CrossRef]
- Kavsaoğlu, A.R.; Polat, K.; Bozkurt, M.R. A novel feature ranking algorithm for biometric recognition with PPG signals. Comput. Biol. Med. 2014, 49, 1–14. [Google Scholar] [CrossRef]
- Sarkar, A.; Abbott, A.L.; Doerzaph, Z. Biometric authentication using photoplethysmography signals. In Proceedings of the 2016 IEEE 8th International Conference on Biometrics Theory, Applications and Systems (BTAS), Niagara Falls, NY, USA, 6–9 September 2016. [Google Scholar] [CrossRef]
- Spachos, P.; Gao, J.; Hatzinakos, D. Feasibility study of photoplethysmographic signals for biometric identification. In Proceedings of the 2011 17th International Conference on Digital Signal Processing (DSP), Corfu, Greece, 6–8 July 2011. [Google Scholar] [CrossRef]
- Lee, A.; Kim, Y. Photoplethysmography as a form of biometric authentication. In Proceedings of the 2015 IEEE SENSORS, Busan, Korea, 1–4 November 2015. [Google Scholar] [CrossRef]
- Lee, S.W. Wearable Bio-Signal(PPG)-Based Personal Authentication Method Using Random Forest and Period Setting Considering the Feature of PPG Signals. J. Comput. 2019, 14, 283–294. [Google Scholar] [CrossRef]
- Karimian, N.; Tehranipoor, M.; Forte, D. Non-fiducial PPG-based authentication for healthcare application. In Proceedings of the 2017 IEEE EMBS International Conference on Biomedical & Health Informatics (BHI), Orlando, FL, USA, 16–19 February 2017. [Google Scholar] [CrossRef]
- Yang, J.; Huang, Y.; Huang, F.; Yang, G. Photoplethysmography Biometric Recognition Model Based on Sparse Softmax Vector and k-Nearest Neighbor. J. Electr. Comput. Eng. 2020, 2020, 9653470. [Google Scholar] [CrossRef]
- Yang, J.; Huang, Y.; Zhang, R.; Huang, F.; Meng, Q.; Feng, S. Study on PPG Biometric Recognition Based on Multifeature Extraction and Naive Bayes Classifier. Sci. Program. 2021, 2021, 5597624. [Google Scholar] [CrossRef]
- Patil, O.R.; Wang, W.; Gao, Y.; Xu, W.; Jin, Z. A Non-Contact PPG Biometric System Based on Deep Neural Network. In Proceedings of the 2018 IEEE 9th International Conference on Biometrics Theory, Applications and Systems (BTAS), Redondo Beach, CA, USA, 22–25 October 2018. [Google Scholar] [CrossRef]
- Gottwald, G.A.; Melbourne, I. A new test for chaos in deterministic systems. Proc. R. Soc. Ser. A Math. Phys. Eng. Sci. 2004, 460, 603–611. [Google Scholar] [CrossRef] [Green Version]
- Gottwald, G.A.; Melbourne, I. Testing for chaos in deterministic systems with noise. Phys. D Nonlinear Phenom. 2005, 212, 100–110. [Google Scholar] [CrossRef] [Green Version]
- Bernardini, D.; Litak, G. An overview of 0–1 test for chaos. J. Braz. Soc. Mech. Sci. Eng. 2015, 38, 1433–1450. [Google Scholar] [CrossRef]
- de Pedro-Carracedo, J.; Ugena, A.; Gonzalez-Marcos, A. Dynamical analysis of biological signals with the 0–1 test. arXiv 2019, arXiv:1906.00782. [Google Scholar]
- Nicol, M.; Melbourne, I.; Ashwin, P. Euclidean extensions of dynamical systems. Nonlinearity 2001, 14, 275–300. [Google Scholar] [CrossRef] [Green Version]
- Gottwald, G.A.; Melbourne, I. On the Implementation of the 0–1 Test for Chaos. SIAM J. Appl. Dyn. Syst. 2009, 8, 129–145. [Google Scholar] [CrossRef]
- Gottwald, G.A.; Melbourne, I. On the validity of the 0–1 test for chaos. Nonlinearity 2009, 22, 1367–1382. [Google Scholar] [CrossRef]
- Szegedy, C.; Ioffe, S.; Vanhoucke, V.; Alemi, A. Inception-v4, Inception-ResNet and the Impact of Residual Connections on Learning. AAAI Conf. Artif. Intell. 2016, 17, 4278–4284. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. arXiv 2015, arXiv:1409.1556. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015. [Google Scholar] [CrossRef] [Green Version]
- Koch, G.R. Siamese Neural Networks for One-Shot Image Recognition. In Proceedings of the 32nd International Conference on Machine Learning, Lille, France, 6–11 July 2015. [Google Scholar]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the Inception Architecture for Computer Vision. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar] [CrossRef] [Green Version]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar] [CrossRef] [Green Version]
- Ioffe, S.; Szegedy, C. Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift. In Proceedings of the 32nd International Conference on International Conference on Machine Learning, Lille, France, 6–11 July 2015; pp. 448–456. [Google Scholar]
- Aguiló, J.; Ferrer-Salvans, P.; García-Rozo, A.; Armario, A.; Corbi, A.; Cambra, F.J.; Bailón, R.; González-Marcos, A.; Caja, G.; Aguiló, S.; et al. Project ES3: Attempting to quantify and measure the level of stress. Rev. Neurol. 2015, 61, 405–415. [Google Scholar]
- Arza, A.; Garzón-Rey, J.M.; Lázaro, J.; Gil, E.; López-Antón, R.; de la Cámara, C.; Laguna, P.; Bailón, R.; Aguiló, J. Measuring acute stress response through physiological signals: Towards a quantitative assessment of stress. Med. Biol. Eng. Comput. 2018, 57, 271–287. [Google Scholar] [CrossRef] [Green Version]
- Slapničar, G.; Mlakar, N.; Luštrek, M. Blood Pressure Estimation from Photoplethysmogram Using a Spectro-Temporal Deep Neural Network. Sensors 2019, 19, 3420. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Reisner, A.; Shaltis, P.A.; McCombie, D.; Asada, H.H.; Warner, D.S.; Warner, M.A. Utility of the Photoplethysmogram in Circulatory Monitoring. Anesthesiology 2008, 108, 950–958. [Google Scholar] [CrossRef] [Green Version]
- Kingma, D.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Duchi, J.; Hazan, E.; Singer, Y. Adaptive Subgradient Methods for Online Learning and Stochastic Optimization. J. Mach. Learn. Res. 2011, 12, 2121–2159. [Google Scholar]
- Dauphin, Y.N.; de Vries, H.; Chung, J.; Bengio, Y. RMSProp and equilibrated adaptive learning rates for non-convex optimization. arXiv 2015, arXiv:1502.04390. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer Number | Type | Output Size | Configuration |
|---|---|---|---|
| Input | — | ||
| Input | — | ||
| 2 | 0–1 test preprocessing | Siamese | |
| 3 | Stem | Siamese | |
| 4 | Inception-ResNet-A | Siamese | |
| 5 | Reduction-A | Siamese | |
| 6 | Inception-Resnet-B | Siamese | |
| 7 | Reduction-B | Siamese | |
| 8 | Inception-Resnet-C | Siamese | |
| 9 | Similarity function | — | |
| 11 | Flatten | 114688 | — |
| 12 | Dense | 1 | — |
| 13 | Sigmoidal activation | 1 | — |
| Raw Data | ||||
|---|---|---|---|---|
| Precision | Recall | F Score | Threshold | Equal Error Rate (EER) |
| 0.82 | 0.82 | 0.82 | 0.48 | 0.22 |
| filtered data [0.1–8 Hz] | ||||
| 0.80 | 0.80 | 0.80 | 0.37 | 0.23 |
| filtered data [0.5–8 Hz] | ||||
| 0.89 | 0.89 | 0.89 | 0.40 | 0.19 |
| filtered data [0.5–8 Hz] and normalized in interval | ||||
| 0.90 | 0.90 | 0.90 | 0.73 | 0.18 |
| Raw Data | ||||
|---|---|---|---|---|
| Precision | Recall | F Score | Threshold | Equal Error Rate (EER) |
| 0.86 | 0.86 | 0.86 | 0.53 | 0.21 |
| filtered data [0.1–8 Hz] | ||||
| 0.82 | 0.82 | 0.82 | 0.57 | 0.22 |
| filtered data [0.5–8 Hz] | ||||
| 0.93 | 0.93 | 0.93 | 0.68 | 0.11 |
| filtered data [0.5–8 Hz] and normalized in interval | ||||
| 0.97 | 0.97 | 0.97 | 0.34 | 0.06 |
| PPG-Based Biometric Recognition Method | Equal Error Rate (EER) (%) | Rank-1 Accuracy (%) | Acquisition and Processing Time (s) |
|---|---|---|---|
| Yang et al. 2021 [50] | 2.36 | 99.69 | 600.027 |
| Yang et al. 2020 [49] | — | 99.92 | 480.44 |
| Lee et al. 2019 [47] | — | 99.00 | — |
| Sancho et al. 2018 [5] | 6.9 | — | 21.35 |
| Patil et al. 2018 [51] | 23.34 | 86.67 | — |
| Yadav et al. 2018 [19] | 2.82 | — | — |
| Karimian et al. 2017 [48] | 3.91 | 99.44 | — |
| Sarkar et al. 2016 [44] | — | 90.53 | 14.00 |
| Lee and Kim 2015 [46] | 3.7 | 96.04 | — |
| Kavsaoğlu et al. 2014 [43] | — | 94.44 | 13.50 |
| Spachos et al. 2011 [45] | 12.75 | — | — |
| Our approach | 2.02 | 97.00 | 12.01 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
de Pedro-Carracedo, J.; Fuentes-Jimenez, D.; Ugena, A.M.; Gonzalez-Marcos, A.P. Transcending Conventional Biometry Frontiers: Diffusive Dynamics PPG Biometry. Sensors 2021, 21, 5661. https://doi.org/10.3390/s21165661
de Pedro-Carracedo J, Fuentes-Jimenez D, Ugena AM, Gonzalez-Marcos AP. Transcending Conventional Biometry Frontiers: Diffusive Dynamics PPG Biometry. Sensors. 2021; 21(16):5661. https://doi.org/10.3390/s21165661
Chicago/Turabian Stylede Pedro-Carracedo, Javier, David Fuentes-Jimenez, Ana María Ugena, and Ana Pilar Gonzalez-Marcos. 2021. "Transcending Conventional Biometry Frontiers: Diffusive Dynamics PPG Biometry" Sensors 21, no. 16: 5661. https://doi.org/10.3390/s21165661