
On the Viability of Video Imaging in Leak Rate Quantification: A Theoretical Error Analysis


Abstract
:1. Introduction
2. Theory
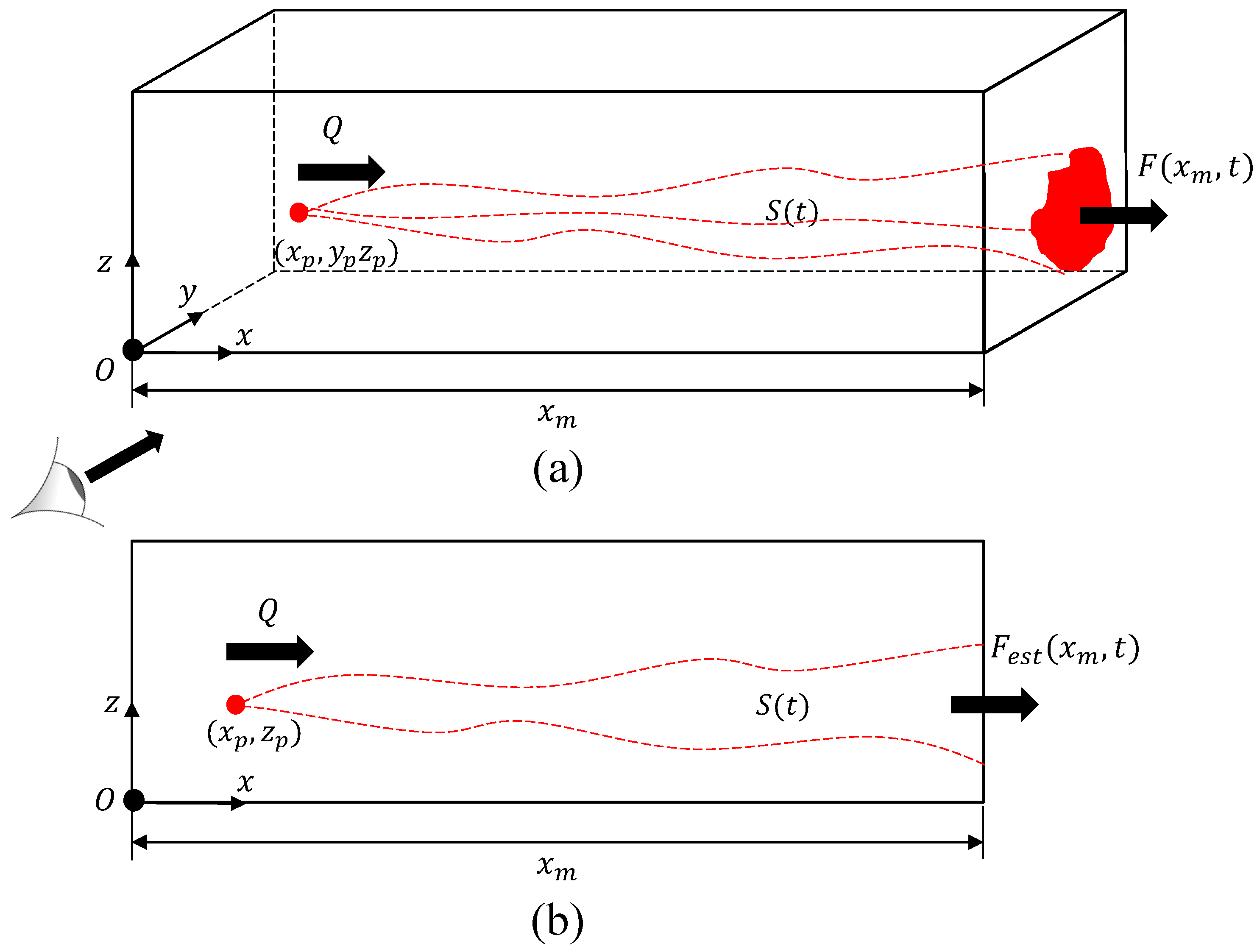
2.1. Instantaneous 3D View of Plume Transport
2.2. 2D Modeling of Instantaneous Plume Transport
2.3. Projection Uncertainty Formulation
2.4. Inferred Velocity Considerations
Case 1: Concentration weighted average velocity (ideal case)
Case 2: Maximum difference velocity (upper bound case)
Case 3: Maximum concentration velocity
3. Large Eddy Simulation Data
4. Results and Discussion
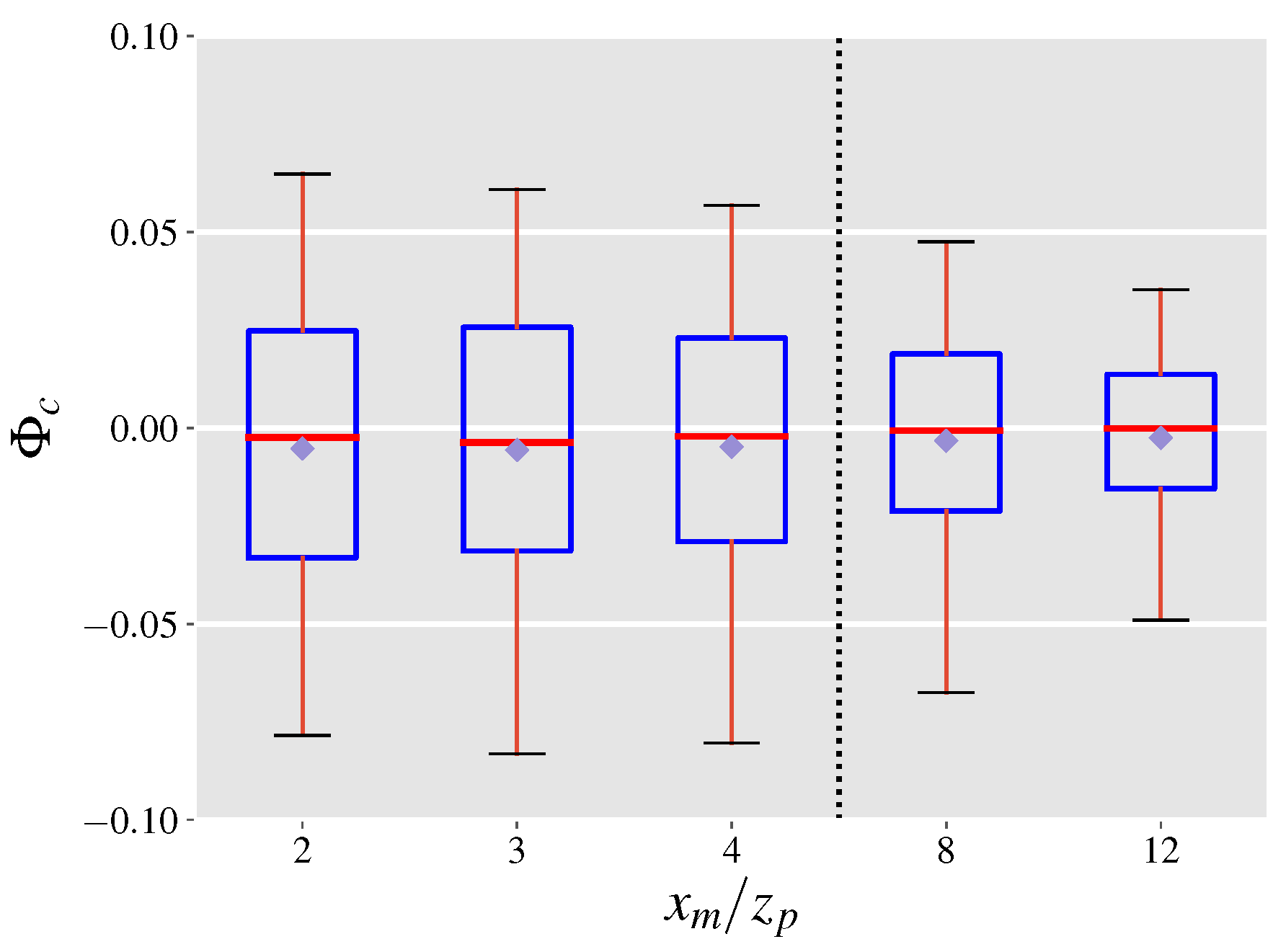
4.1. Covariance Error Term
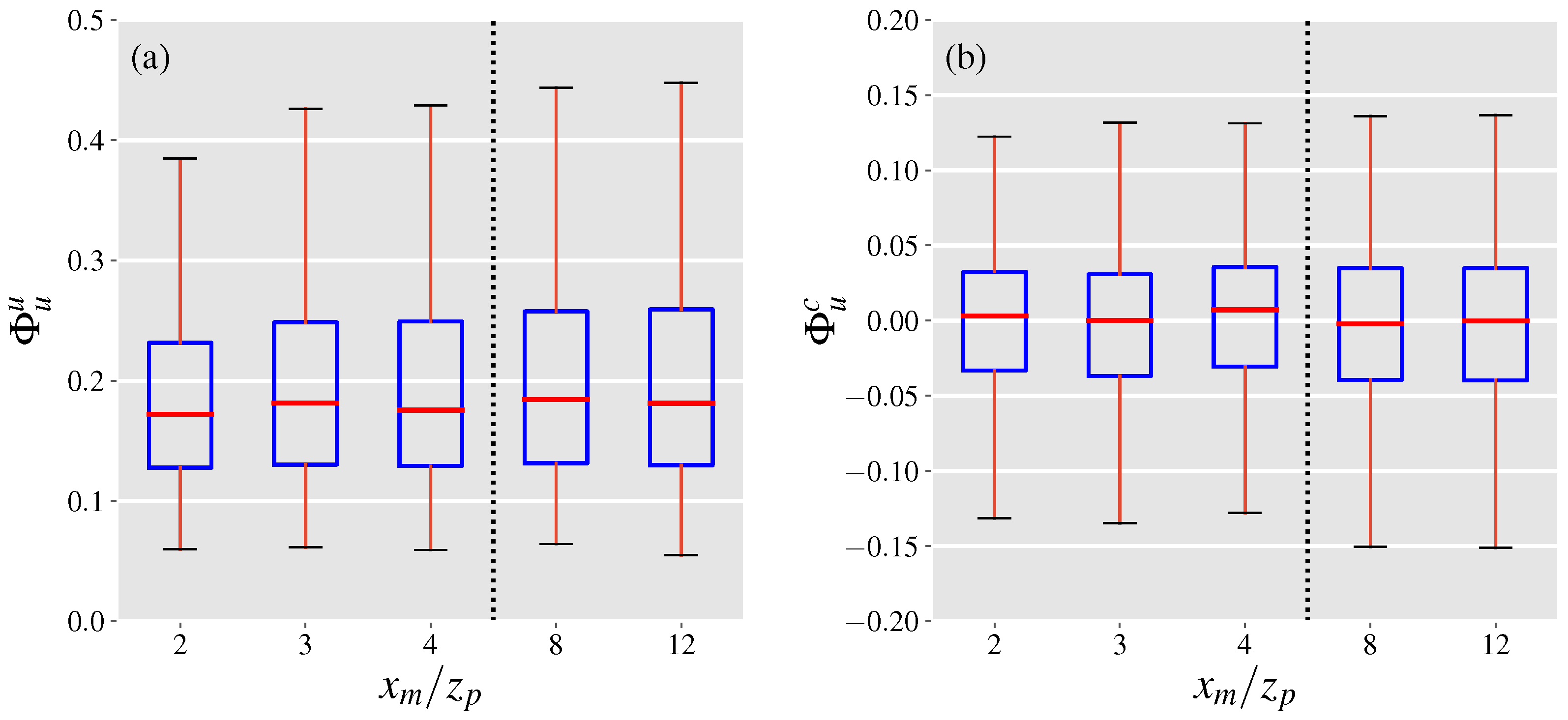
4.2. Mean Velocity Error Term
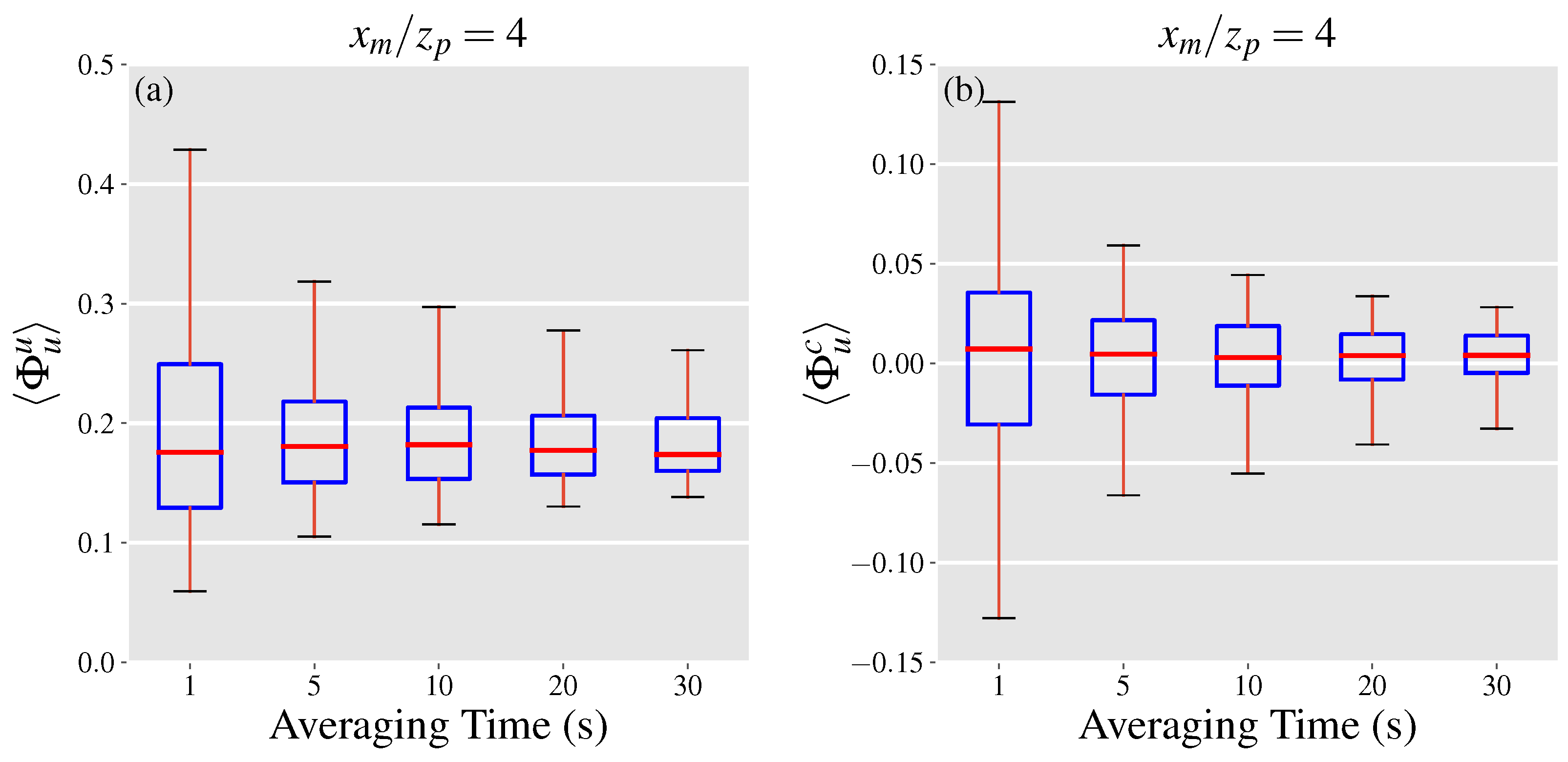
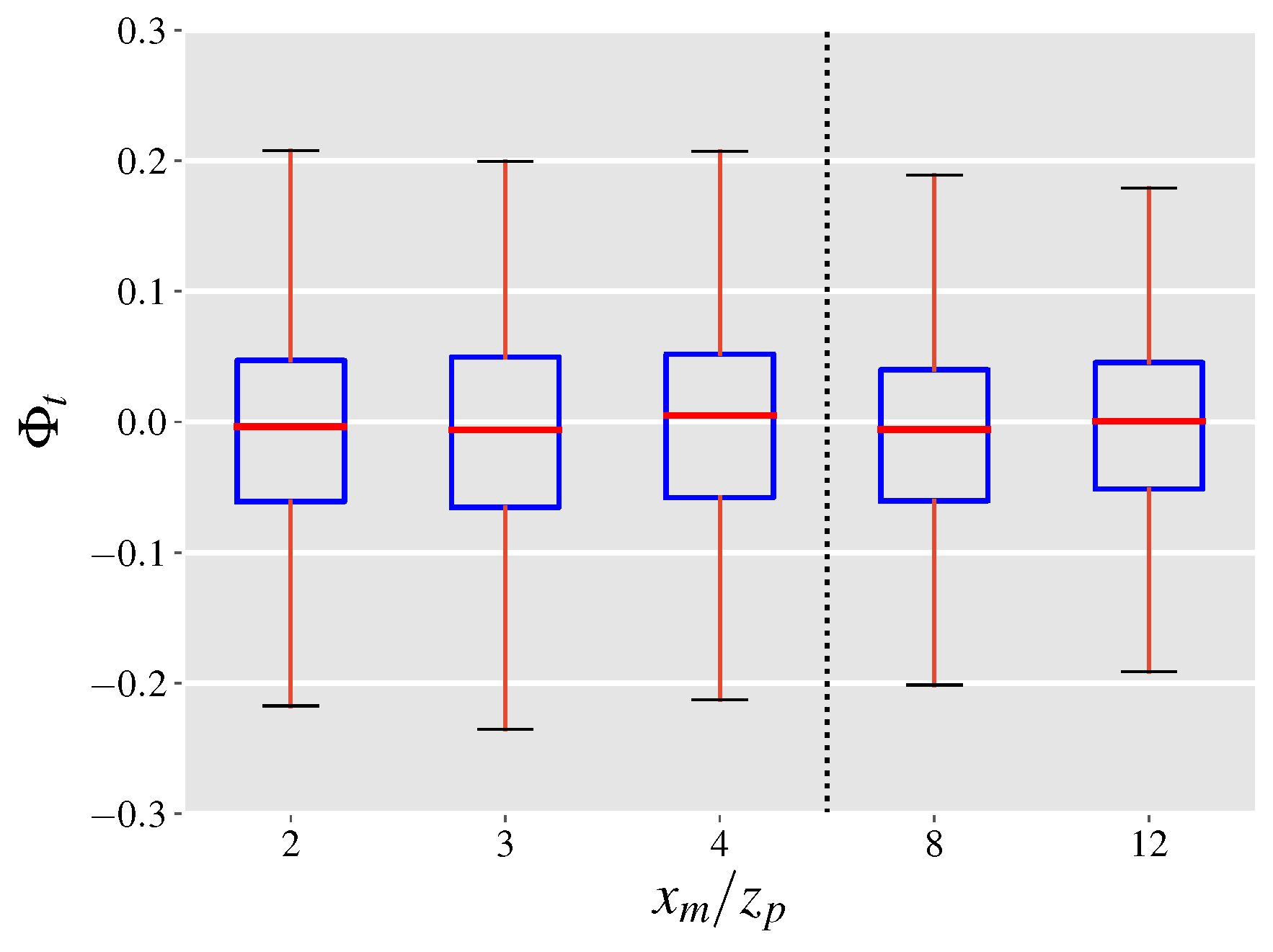
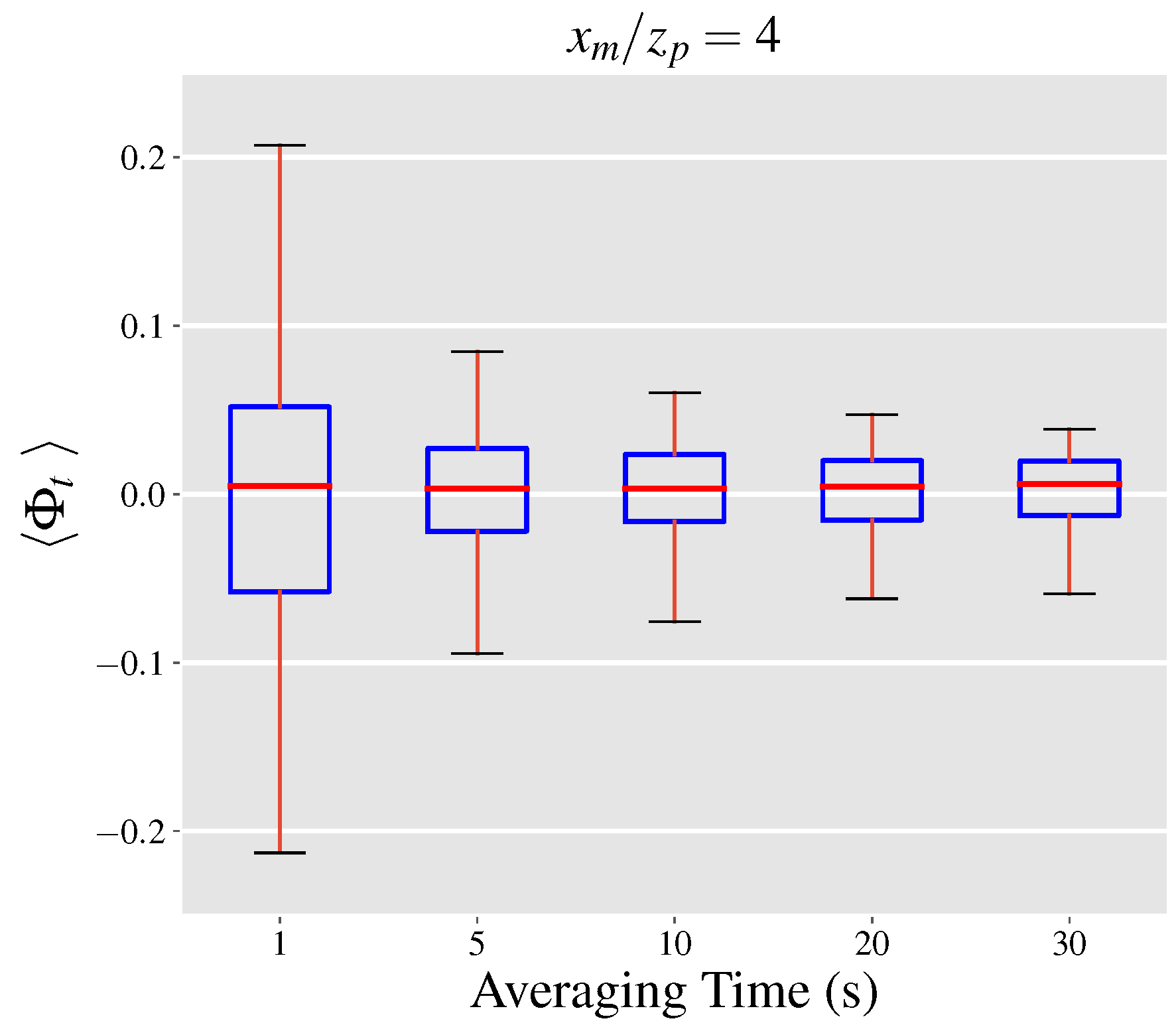
4.3. Total Projection Uncertainty
5. Summary and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, Q.; Chen, X.; Jha, A.N.; Rogers, H. Natural gas from shale formation—The evolution, evidences and challenges of shale gas revolution in United States. Renew. Sustain. Energy Rev. 2014, 30, 1–28. [Google Scholar] [CrossRef]
- U.S. Energy Information Administration (EIA). 2020. Available online: https://www.eia.gov/todayinenergy/detail.php?id=43115 (accessed on 19 February 2021).
- Alvarez, R.A.; Pacala, S.W.; Winebrake, J.J.; Chameides, W.L.; Hamburg, S.P. Greater focus needed on methane leakage from natural gas infrastructure. Proc. Natl. Acad. Sci. USA 2012, 109, 6435–6440. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- U.S. Environmental Protection Agency. New source performance standards; oil and natural gas sector: Emission standards for new, reconstructed, and modified sources. Fed. Regist. 2016, 81, 35824–35942. [Google Scholar]
- Johnson, D.R.; Covington, A.N.; Clark, N.N. Methane Emissions from Leak and Loss Audits of Natural Gas Compressor Stations and Storage Facilities. Environ. Sci. Technol. 2015, 49, 8132–8138. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Flesch, T.K.; Harper, L.A.; Desjardins, R.L.; Gao, Z.; Crenna, B.P. Multi-Source Emission Determination Using an Inverse-Dispersion Technique. Bound.-Layer Meteorol. 2009, 132, 11–30. [Google Scholar] [CrossRef]
- Krings, T.; Gerilowski, K.; Buchwitz, M.; Reuter, M.; Tretner, A.; Erzinger, J.; Heinze, D.; Pflüger, U.; Burrows, J.P.; Bovensmann, H. MAMAP—A new spectrometer system for column-averaged methane and carbon dioxide observations from aircraft: Retrieval algorithm and first inversions for point source emission rates. Atmos. Meas. Tech. 2011, 4, 1735–1758. [Google Scholar] [CrossRef] [Green Version]
- Tratt, D.M.; Buckland, K.N.; Hall, J.L.; Johnson, P.D.; Keim, E.R.; Leifer, I.; Westberg, K.; Young, S.J. Airborne visualization and quantification of discrete methane sources in the environment. Remote Sens. Environ. 2014, 154, 74–88. [Google Scholar] [CrossRef]
- Duren, R.M.; Thorpe, A.K.; Foster, K.T.; Rafiq, T.; Hopkins, F.M.; Yadav, V.; Bue, B.D.; Thompson, D.R.; Conley, S.; Colombi, N.K.; et al. California’s methane super-emitters. Nature 2019, 575, 180–184. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Albertson, J.D.; Harvey, T.; Foderaro, G.; Zhu, P.; Zhou, X.; Ferrari, S.; Amin, M.S.; Modrak, M.; Brantley, H.; Thoma, E.D. A Mobile Sensing Approach for Regional Surveillance of Fugitive Methane Emissions in Oil and Gas Production. Environ. Sci. Technol. 2016, 50, 2487–2497. [Google Scholar] [CrossRef] [Green Version]
- Zhou, X.; Yoon, S.; Mara, S.; Falk, M.; Kuwayama, T.; Tran, T.; Cheadle, L.; Nyarady, J.; Croes, B.; Scheehle, E.; et al. Mobile sampling of methane emissions from natural gas well pads in California. Atmos. Environ. 2021, 244, 117930. [Google Scholar] [CrossRef]
- Shah, A.; Allen, G.; Pitt, J.R.; Ricketts, H.; Williams, P.I.; Helmore, J.; Finlayson, A.; Robinson, R.; Kabbabe, K.; Hollingsworth, P.; et al. A Near-Field Gaussian Plume Inversion Flux Quantification Method, Applied to Unmanned Aerial Vehicle Sampling. Atmosphere 2019, 10, 396. [Google Scholar] [CrossRef] [Green Version]
- Shah, A.; Pitt, J.; Kabbabe, K.; Allen, G. Suitability of a Non-Dispersive Infrared Methane Sensor Package for Flux Quantification Using an Unmanned Aerial Vehicle. Sensors 2019, 19, 4705. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shah, A.; Pitt, J.R.; Ricketts, H.; Leen, J.B.; Williams, P.I.; Kabbabe, K.; Gallagher, M.W.; Allen, G. Testing the near-field Gaussian plume inversion flux quantification technique using unmanned aerial vehicle sampling. Atmos. Meas. Tech. 2020, 13, 1467–1484. [Google Scholar] [CrossRef] [Green Version]
- Golston, L.M.; Aubut, N.F.; Frish, M.B.; Yang, S.; Talbot, R.W.; Gretencord, C.; McSpiritt, J.; Zondlo, M.A. Natural Gas Fugitive Leak Detection Using an Unmanned Aerial Vehicle: Localization and Quantification of Emission Rate. Atmosphere 2018, 9, 333. [Google Scholar] [CrossRef] [Green Version]
- Zhou, X.; Peng, X.; Montazeri, A.; McHale, L.E.; Gaßner, S.; Lyon, D.R.; Yalin, A.P.; Albertson, J.D. Mobile Measurement System for the Rapid and Cost-Effective Surveillance of Methane and Volatile Organic Compound Emissions from Oil and Gas Production Sites. Environ. Sci. Technol. 2021, 55, 581–592. [Google Scholar] [CrossRef] [PubMed]
- Zhou, X.; Passow, F.H.; Rudek, J.; von Fisher, J.C.; Hamburg, S.P.; Albertson, J.D. Estimation of methane emissions from the U.S. ammonia fertilizer industry using a mobile sensing approach. Elem. Sci. Anthr. 2019, 7. [Google Scholar] [CrossRef] [Green Version]
- Xu, X.; Karney, B. An Overview of Transient Fault Detection Techniques. In Modeling and Monitoring of Pipelines and Networks: Advanced Tools for Automatic Monitoring and Supervision of Pipelines; Verde, C., Torres, L., Eds.; Applied Condition Monitoring; Springer International Publishing: Cham, Switzerland, 2017; pp. 13–37. [Google Scholar] [CrossRef]
- Brunone, B.; Capponi, C.; Meniconi, S. Design criteria and performance analysis of a smart portable device for leak detection in water transmission mains. Measurement 2021, 183, 109844. [Google Scholar] [CrossRef]
- Meniconi, S.; Capponi, C.; Frisinghelli, M.; Brunone, B. Leak Detection in a Real Transmission Main Through Transient Tests: Deeds and Misdeeds. Water Resour. Res. 2021, 57, e2020WR027838. [Google Scholar] [CrossRef]
- Sandsten, J.; Andersson, M. Volume flow calculations on gas leaks imaged with infrared gas-correlation. Opt. Express 2012, 20, 20318–20329. [Google Scholar] [CrossRef]
- Gålfalk, M.; Olofsson, G.; Crill, P.; Bastviken, D. Making methane visible. Nat. Clim. Chang. 2016, 6, 426–430. [Google Scholar] [CrossRef]
- Hagen, N.; Kester, R.T.; Walker, C. Real-time quantitative hydrocarbon gas imaging with the gas cloud imager (GCI). Chemical, Biological, Radiological, Nuclear, and Explosives (CBRNE) Sensing XIII. Int. Soc. Opt. Photonics 2012, 8358, 83581J. [Google Scholar] [CrossRef]
- Meléndez, J.; Guarnizo, G. Fast Quantification of Air Pollutants by Mid-Infrared Hyperspectral Imaging and Principal Component Analysis. Sensors 2021, 21, 2092. [Google Scholar] [CrossRef]
- Gui, L.C.; Merzkirch, W. A method of tracking ensembles of particle images. Exp. Fluids 1996, 21, 465–468. [Google Scholar] [CrossRef]
- Gålfalk, M.; Bastviken, D. Remote sensing of methane and nitrous oxide fluxes from waste incineration. Waste Manag. 2018, 75, 319–326. [Google Scholar] [CrossRef]
- Ravikumar, A.P.; Brandt, A.R. Designing better methane mitigation policies: The challenge of distributed small sources in the natural gas sector. Environ. Res. Lett. 2017, 12, 044023. [Google Scholar] [CrossRef] [Green Version]
- Gålfalk, M.; Olofsson, G.; Bastviken, D. Approaches for hyperspectral remote flux quantification and visualization of GHGs in the environment. Remote Sens. Environ. 2017, 191, 81–94. [Google Scholar] [CrossRef]
- Ravikumar, A.P.; Wang, J.; Brandt, A.R. Are Optical Gas Imaging Technologies Effective For Methane Leak Detection? Environ. Sci. Technol. 2017, 51, 718–724. [Google Scholar] [CrossRef]
- Ravikumar, A.P.; Wang, J.; McGuire, M.; Bell, C.S.; Zimmerle, D.; Brandt, A.R. “Good versus Good Enough?” Empirical Tests of Methane Leak Detection Sensitivity of a Commercial Infrared Camera. Environ. Sci. Technol. 2018, 52, 2368–2374. [Google Scholar] [CrossRef] [PubMed]
- ARPA-E. Methane Observation Networks with Innovative Technology to Obtain Reductions. 2015. Available online: https://arpa-e.energy.gov/technologies/programs/monitor (accessed on 24 February 2021).
- Zhou, X.; Montazeri, A.; Albertson, J.D. Mobile sensing of point-source gas emissions using Bayesian inference: An empirical examination of the likelihood function. Atmos. Environ. 2019, 218, 116981. [Google Scholar] [CrossRef]
- Panofsky, H.A.; Dutton, J.A. Atmospheric Turbulence: Models and Methods for Engineering Applications, 1st ed.; John Wiley & Sons.: Hoboken, NJ, USA, 1983. [Google Scholar]
- Stull, R.B. An Introduction to Boundary Layer Meteorology, 1st ed.; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1988. [Google Scholar]
- Albertson, J.D. Large Eddy Simulation of Land-Atmosphere Interaction; University of California: Davis, CA, USA, 1996. [Google Scholar]
- Bou-Zeid, E.; Meneveau, C.; Parlange, M. A scale-dependent Lagrangian dynamic model for large eddy simulation of complex turbulent flows. Phys. Fluids 2005, 17, 025105. [Google Scholar] [CrossRef] [Green Version]
- Tseng, Y.H.; Meneveau, C.; Parlange, M.B. Modeling Flow around Bluff Bodies and Predicting Urban Dispersion Using Large Eddy Simulation. Environ. Sci. Technol. 2006, 40, 2653–2662. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Bou-Zeid, E.; Anderson, W.; Grimmond, S.; Hultmark, M. Quality and reliability of LES of convective scalar transfer at high Reynolds numbers. Int. J. Heat Mass Transf. 2016, 102, 959–970. [Google Scholar] [CrossRef] [Green Version]
- Caulton, D.R.; Li, Q.; Bou-Zeid, E.; Fitts, J.P.; Golston, L.M.; Pan, D.; Lu, J.; Lane, H.M.; Buchholz, B.; Guo, X.; et al. Quantifying uncertainties from mobile-laboratory-derived emissions of well pads using inverse Gaussian methods. Atmos. Chem. Phys. 2018, 18, 15145–15168. [Google Scholar] [CrossRef] [Green Version]
- Nieuwstadt, F.T.M.; de Valk, J.P.J.M.M. A large eddy simulation of buoyant and non-buoyant plume dispersion in the atmospheric boundary layer. Atmos. Environ. (1967) 1987, 21, 2573–2587. [Google Scholar] [CrossRef]
- Mason, P.J. Large-eddy simulation of dispersion in convective boundary layers with wind shear. Atmos. Environ. Part A Gen. Top. 1992, 26, 1561–1571. [Google Scholar] [CrossRef]
- Weil, J.C.; Sullivan, P.P.; Moeng, C.H. The Use of Large-Eddy Simulations in Lagrangian Particle Dispersion Models. J. Atmos. Sci. 2004, 61, 2877–2887. [Google Scholar] [CrossRef]
- Kaimal, J.C.; Finnigan, J.J. Atmospheric Boundary Layer Flows: Their Structure and Measurement; Oxford Universtiy Press: Oxford, UK, 1994; pp. 32–65. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Value |
|---|---|
| Computational domain size ( | 60, 60, 20 (m) |
| Computational grid size () | 0.469, 0.469, 0.188 (m) |
| Height of source () | 2.25 (m) |
| Sampling frequency () | 1 (Hz) |
| Sampling duration () | 900 (s) |
| Downwind distance of intersects () | 4.7, 7.0, 8.9, 17.9, 26.8 (m) |
| Normalized downwind distance of intersects () | 2.1, 3.1, 4.0, 8.0, 11.9 (-) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Montazeri, A.; Zhou, X.; Albertson, J.D. On the Viability of Video Imaging in Leak Rate Quantification: A Theoretical Error Analysis. Sensors 2021, 21, 5683. https://doi.org/10.3390/s21175683
Montazeri A, Zhou X, Albertson JD. On the Viability of Video Imaging in Leak Rate Quantification: A Theoretical Error Analysis. Sensors. 2021; 21(17):5683. https://doi.org/10.3390/s21175683
Chicago/Turabian StyleMontazeri, Amir, Xiaochi Zhou, and John D. Albertson. 2021. "On the Viability of Video Imaging in Leak Rate Quantification: A Theoretical Error Analysis" Sensors 21, no. 17: 5683. https://doi.org/10.3390/s21175683