
Wheelchair-Mounted Upper Limb Robotic Exoskeleton with Adaptive Controller for Activities of Daily Living


Abstract
:1. Introduction
2. Methods
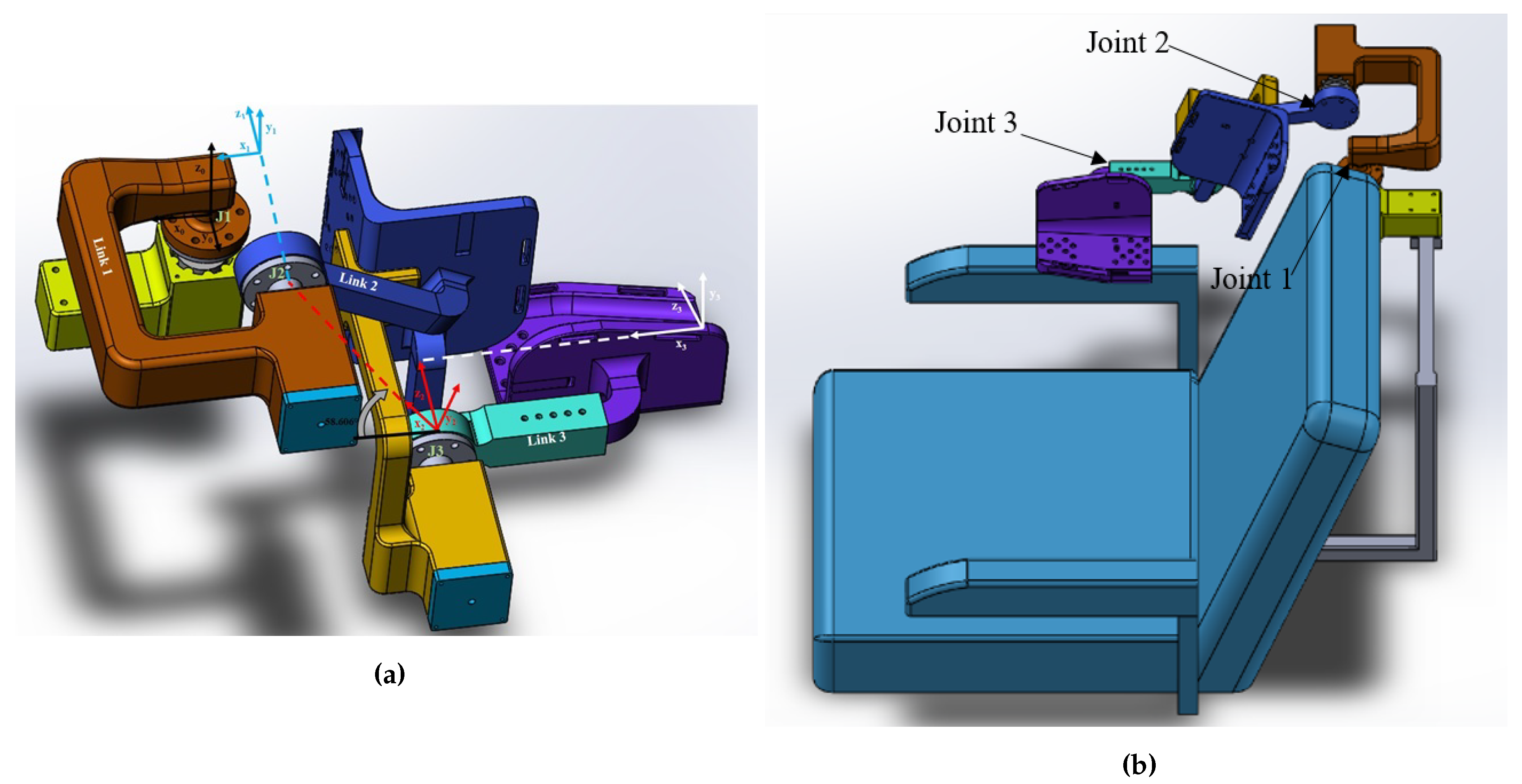
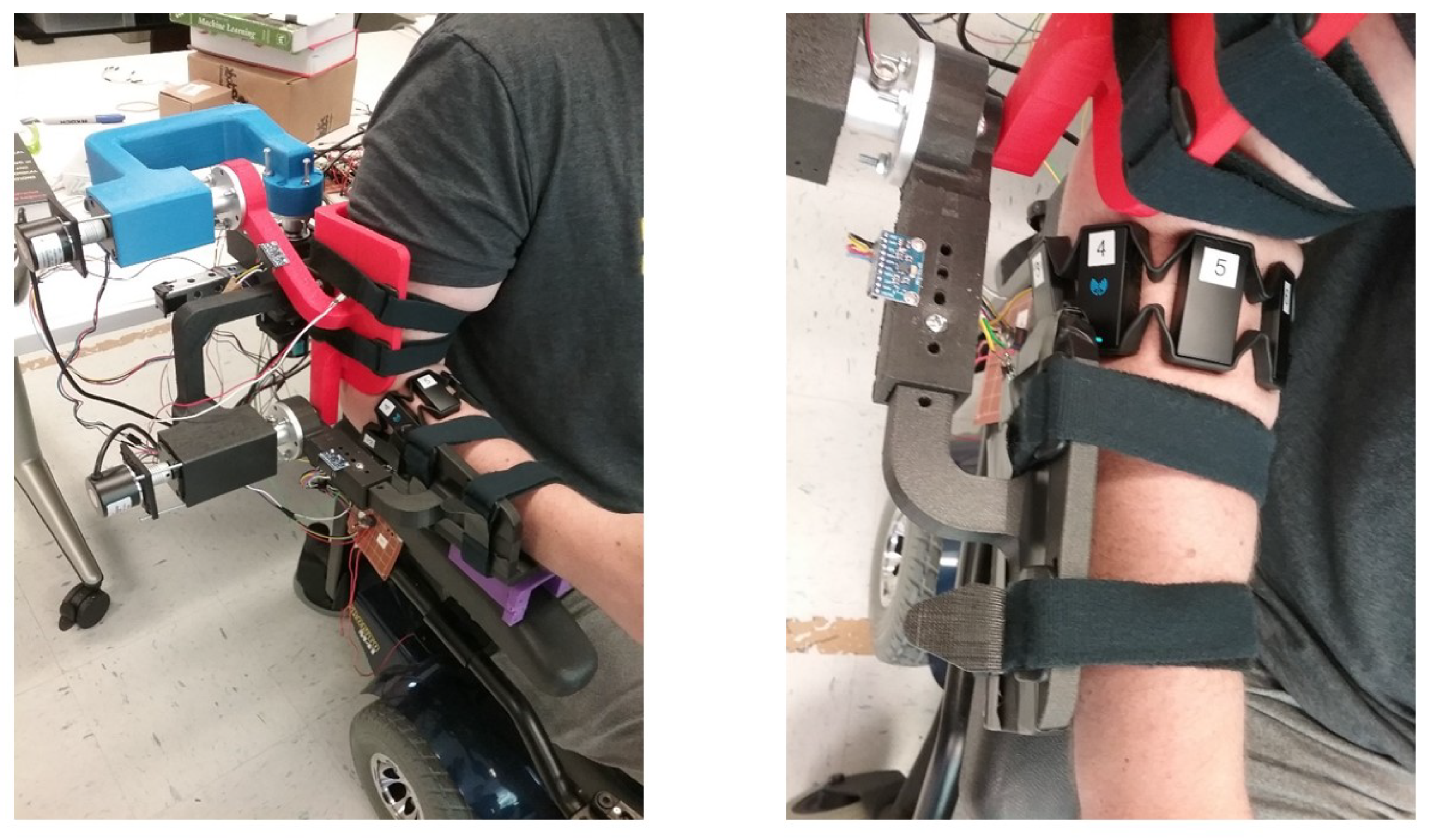
2.1. Wheelchair-Mounted Upper Limb Robotic Exoskeleton Design
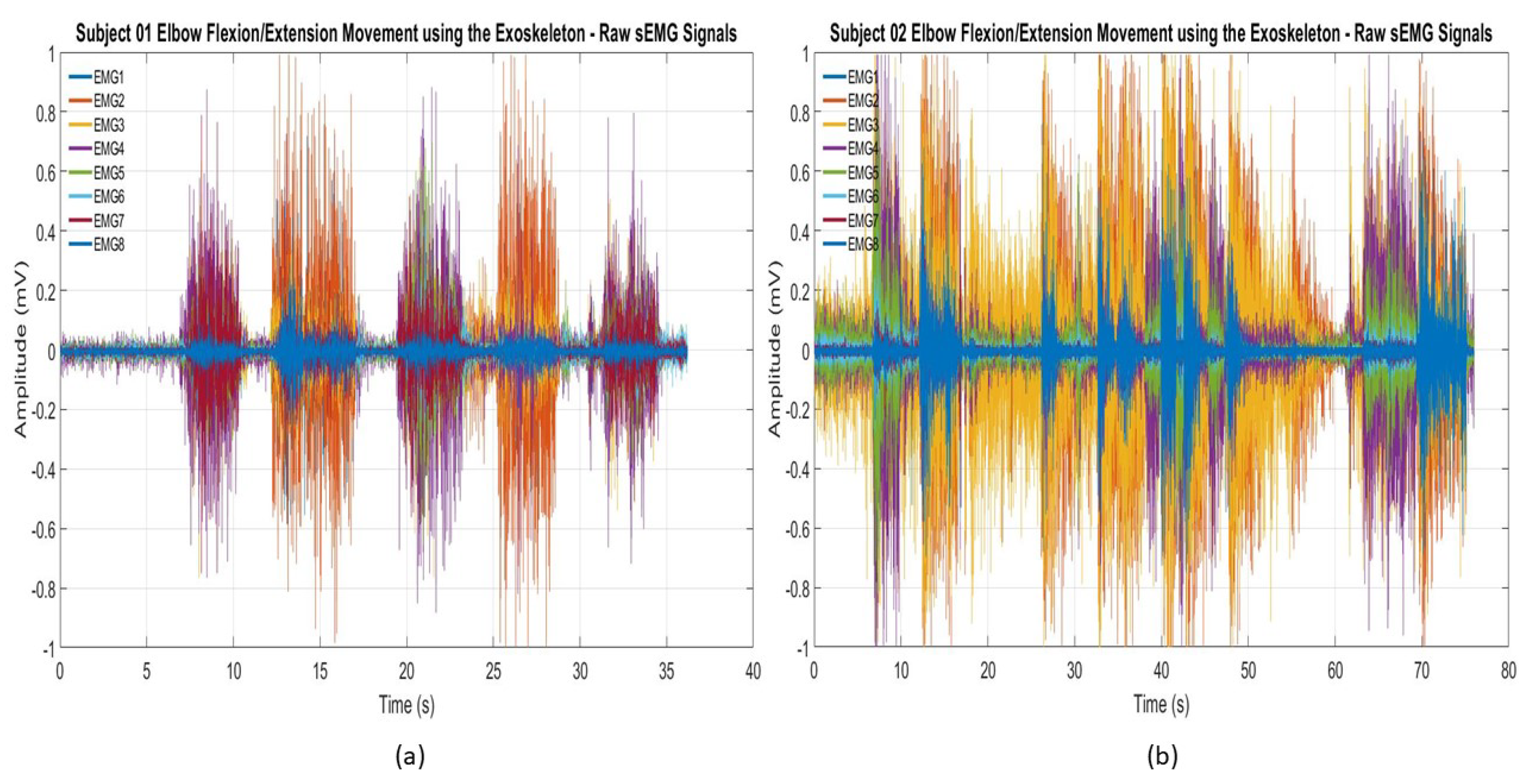
2.2. Surface Electromyography Signal Acquisition and Hand Gestures
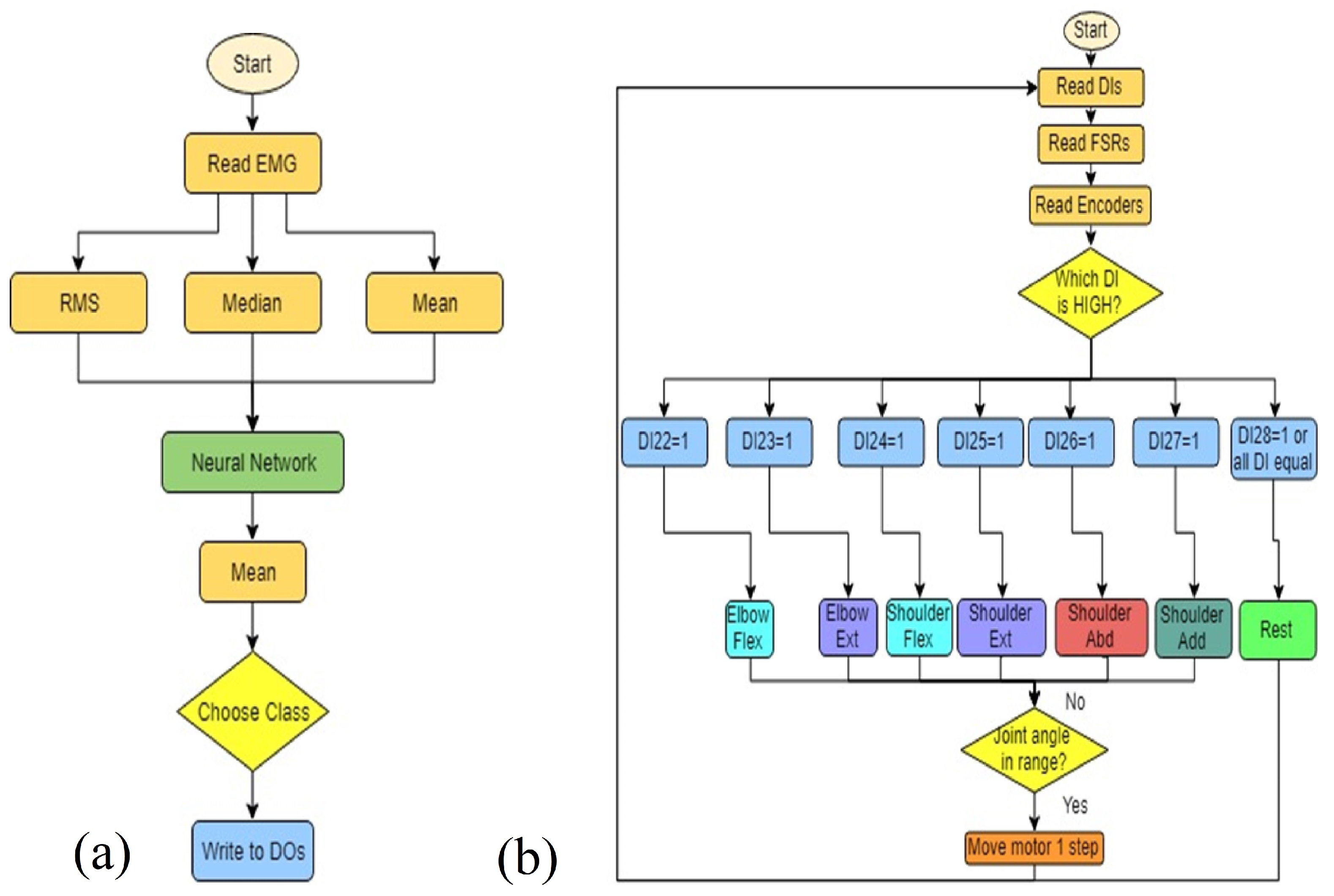
2.3. Adaptive Controller Mechanism
3. Results
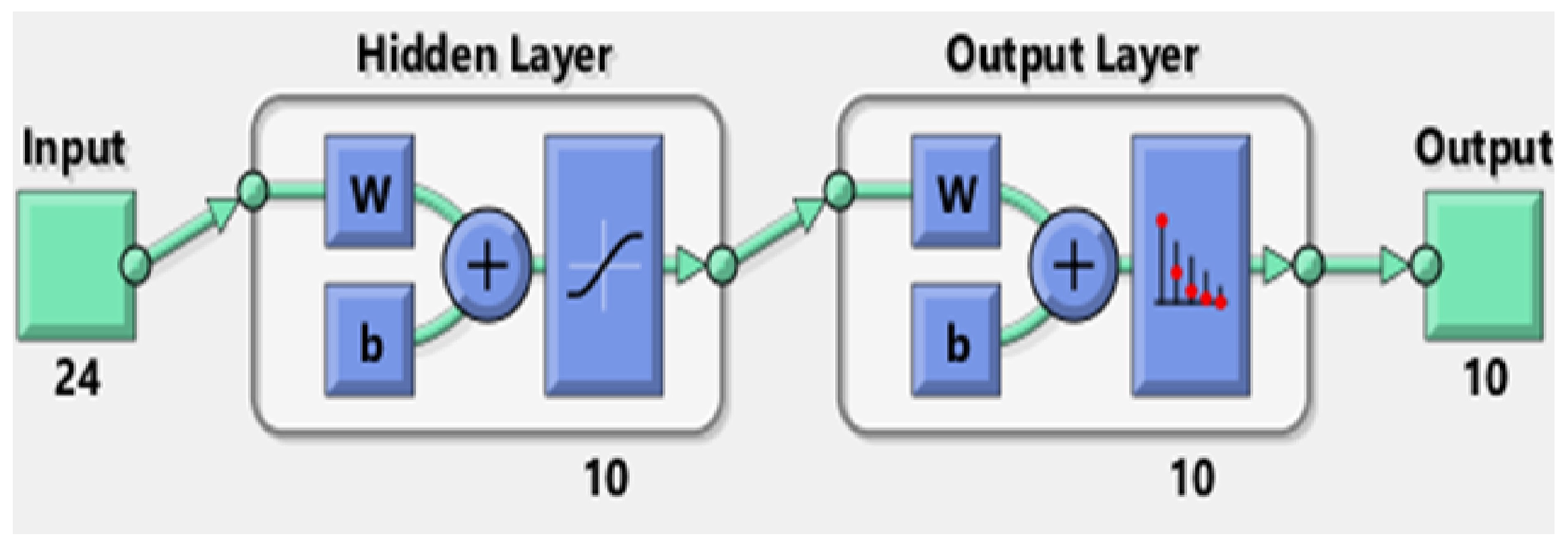
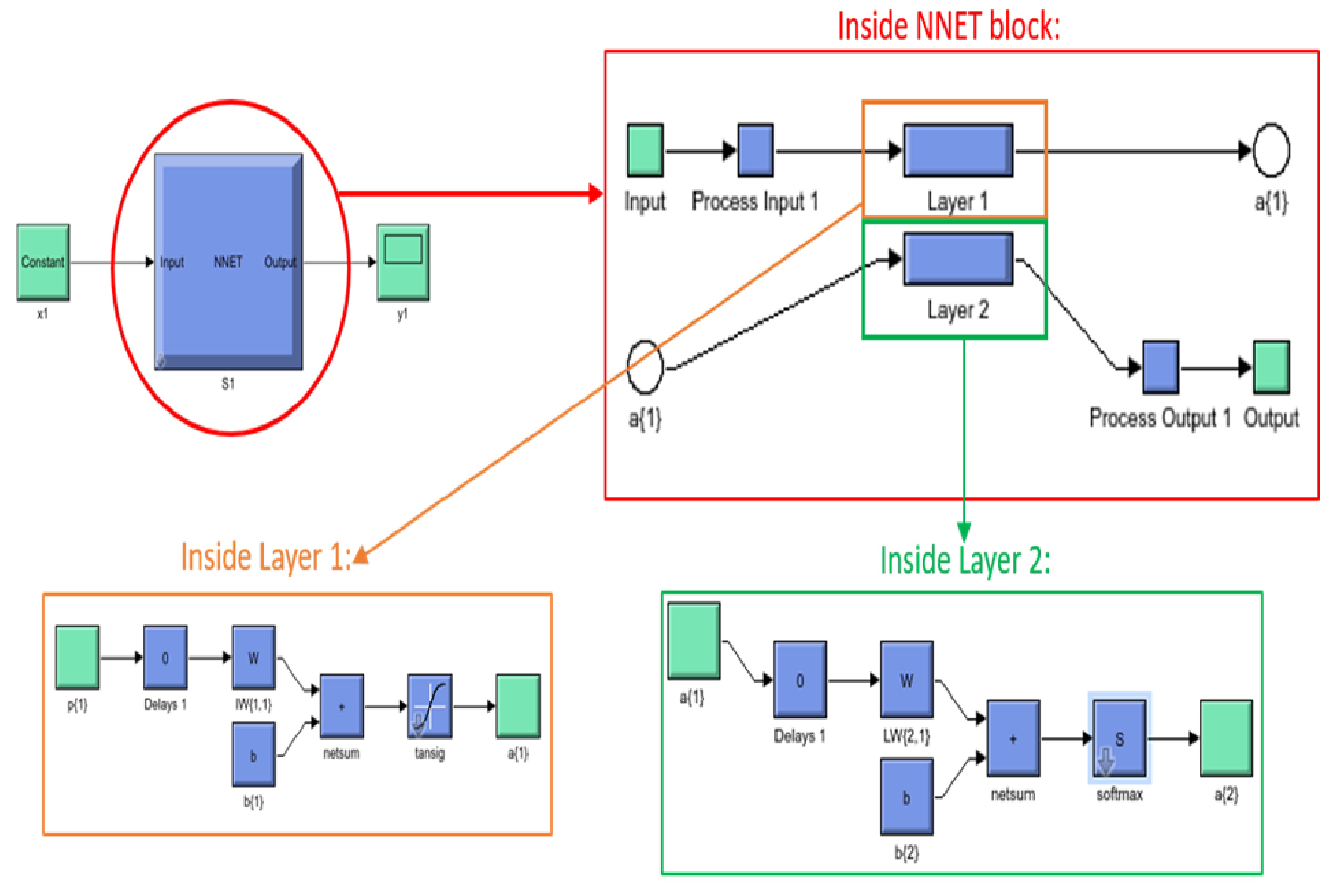
3.1. Artificial Neural Network Training and Accuracy
3.2. Human Subject Testing Results
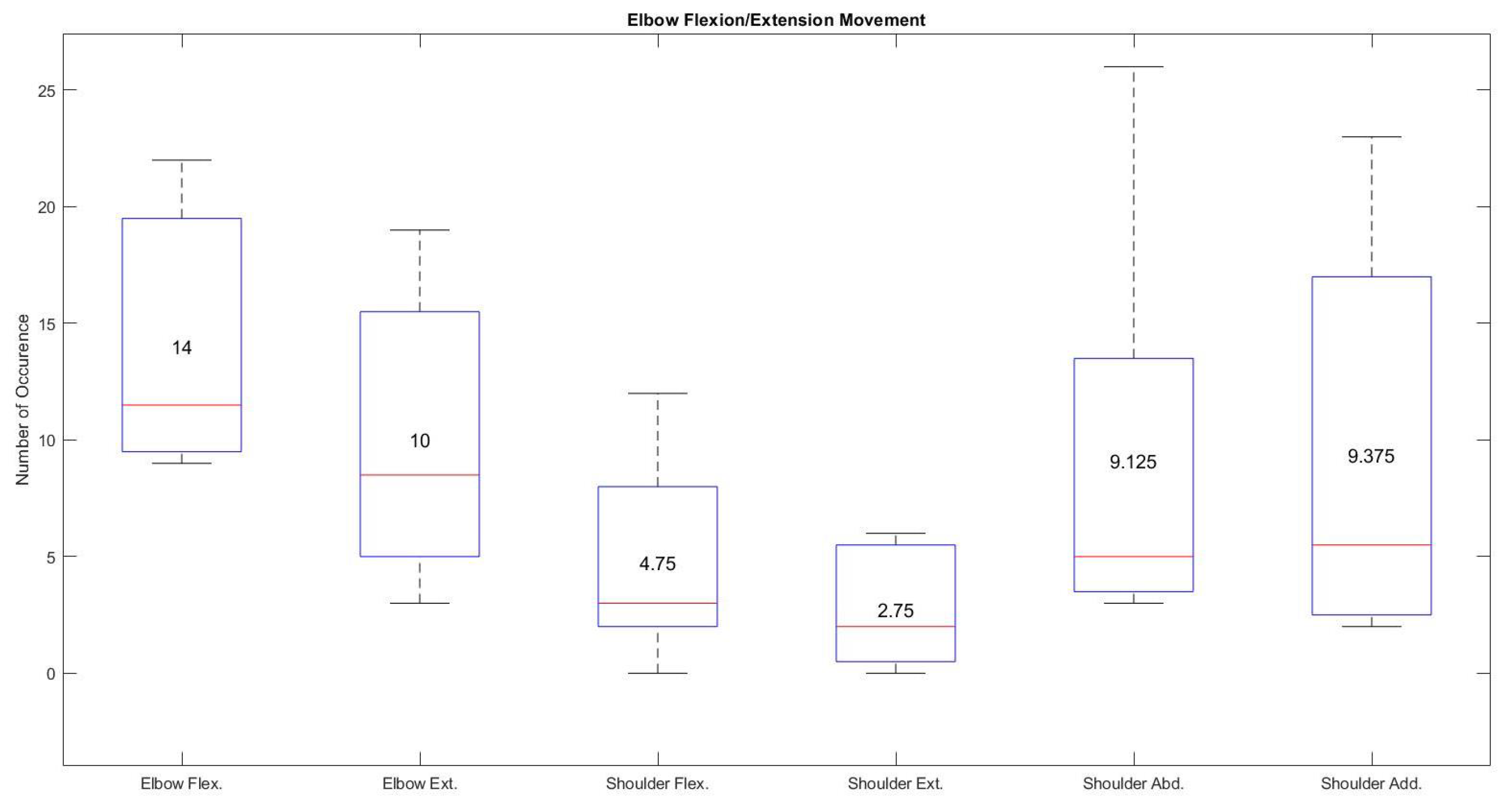
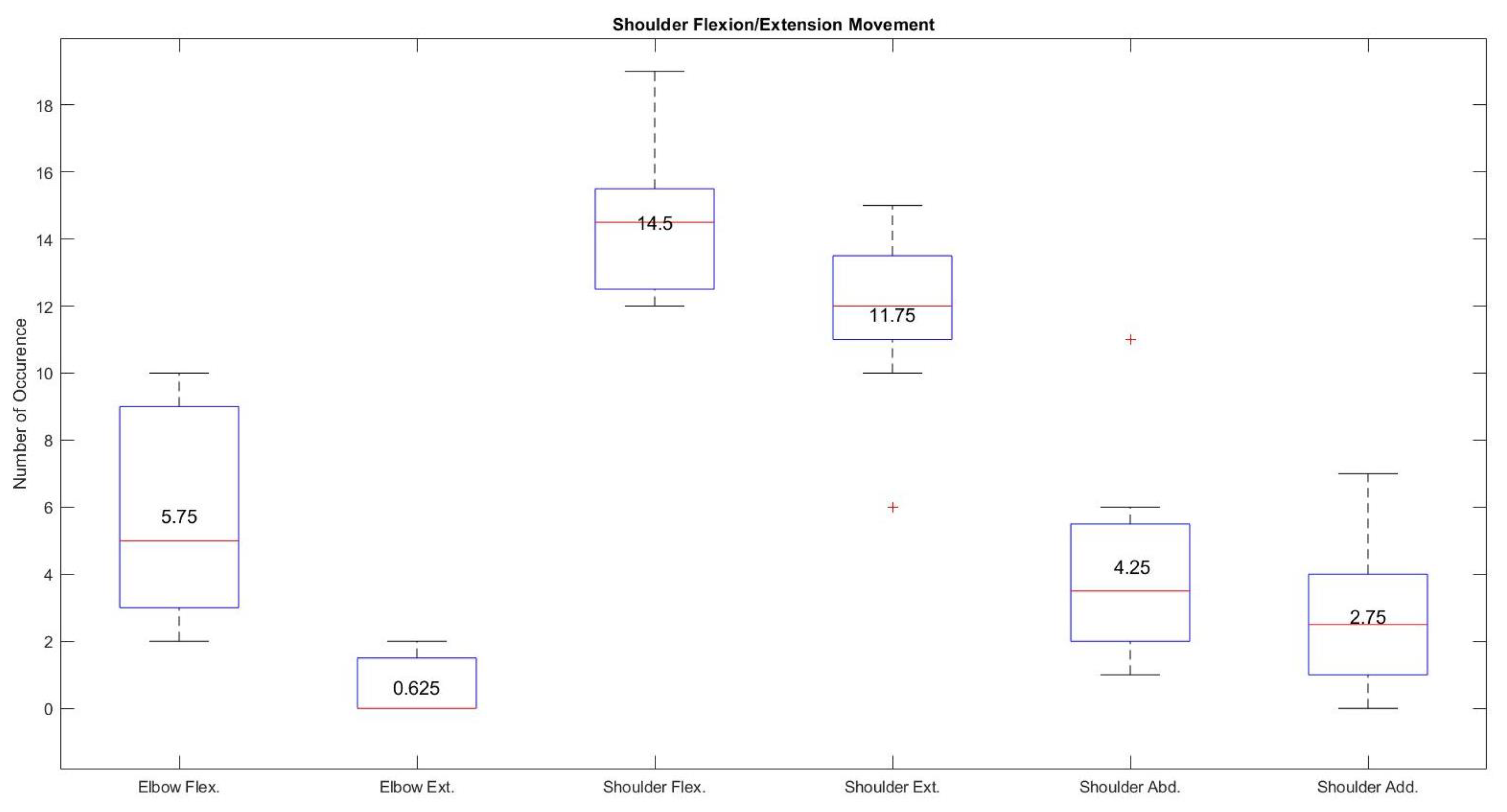
3.2.1. Individual Joint Movements
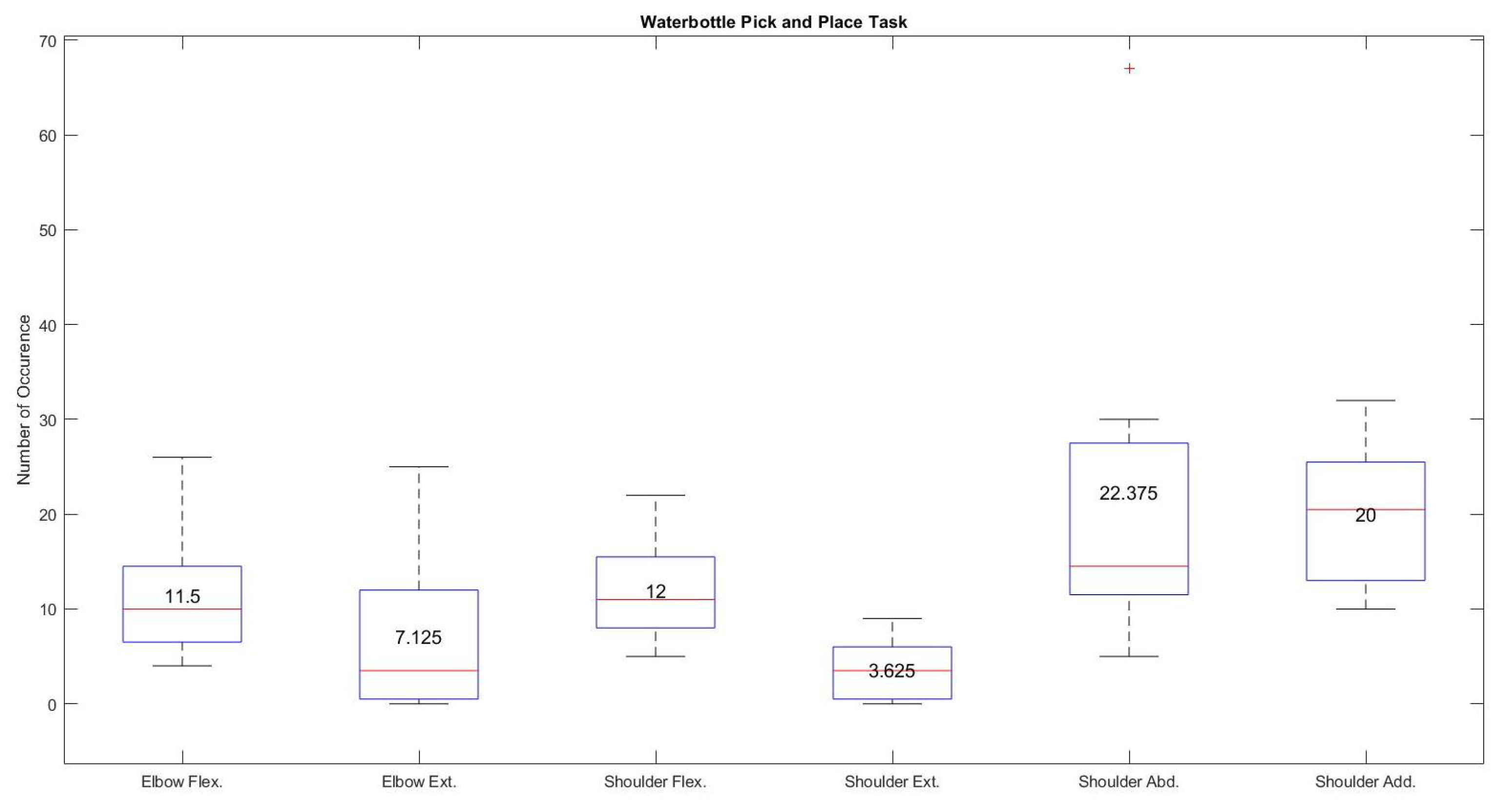
3.2.2. Water Bottle Pick and Place Task
4. Discussion
4.1. Fitting and Comfort
4.2. Hand Gestures and Classification
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Van der Heide, L.A.; Van Ninhuijs, B.; Bergsma, A.; Gelderblom, G.J.; Van Der Pijl, D.J.; De Witte, L.P. An Overview and Categorization of Dynamic Arm Supports for People with Decreased Arm Function. Prosthetics Orthot. Int. 2014, 38, 287–302. [Google Scholar] [CrossRef] [PubMed]
- Schill, O.; Wiegand, R.; Schmitz, B.; Matthies, R.; Eck, U.; Pylatiuk, C.; Reischl, M.; Schulz, S.; Rupp, R. OrthoJacket: An active FES-hybrid orthosis for the paralysed upper extremity. Biomed. Tech. Eng. 2011, 56, 35–44. [Google Scholar] [CrossRef] [PubMed]
- Pedrocchi, A.; Ferrante, S.; Ambrosini, E.; Gandolla, M.; Casellato, C.; Schauer, T.; Klauer, C.; Pascual, J.; Vidaurre, C.; Gföhler, M.; et al. MUNDUS project: MUltimodal Neuroprosthesis for daily Upper limb Support. J. Neuroeng. Rehabil. 2013, 10, 1–20. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tu, X.; He, J.; Wen, Y.; Huang, J.; Huang, X.; Huang, H.; Guo, M.; Yuan, Y. Cooperation of electrically stimulated muscle and pneumatic muscle to realize RUPERT bi-directional motion for grasping. In Proceedings of the 36th Annual International Conference of the IEEE Engineering in Medicine & Biology Society, Chicago, IL, USA, 26–30 August 2014. [Google Scholar]
- Klein, J.; Spencer, S.; Bobrow, J.E.; Allington, J.; Reinkensmeyer, D.J. Optimization of a Parallel Shoulder Mechanism to Achieve a High-Force, Low-Mass, Robotic-Arm Exoskeleton. IEEE Trans. Robot. 2010, 26, 710–715. [Google Scholar] [CrossRef]
- Johnson, G.; Carus, D.A.; Parini, G.; Marchese, S.S.; Valeggi, R. The design of a five-degree-of-freedom powered orthosis for the upper limb. Proc. Inst. Mech. Eng. 2001, 215, 275–284. [Google Scholar] [CrossRef] [PubMed]
- Maciejasz, P.; Eschweiler, J.; Gerlach-Hahn, K.; Jansen-Troy, A.; Leonhardt, S. A survey on robotic devices for upper limb rehabilitation. J. Neuroeng. Rehabil. 2014, 11, 3. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Stewart, A.M.; Pretty, C.G.; Adams, M.; Chen, X. Review of Upper Limb Hybrid Exoskeletons. Int. Fed. Autom. Control. Pap. 2017, 50, 15169–15178. [Google Scholar] [CrossRef]
- Mulas, M.; Folgheraiter, M.; Gini, G. An EMG-Controlled Exoskeleton for Hand Rehabilitation. In Proceedings of the 2005 IEEE 9th International Conference on Rehabilitation Robotics, Chicago, IL, USA, 28 June–1 July 2005. [Google Scholar]
- Kiguchi, K.; Hayashi, Y. An EMG-Based Control for an Upper-Limb Power-Assist Exoskeleton Robot. IEEE Trans. Syst. Man Cybern. Part (Cybern.) 2012, 42, 1064–1071. [Google Scholar] [CrossRef]
- Gopura, R.C.; Kiguchi, K. EMG-Based Control of a 6DOF Upper-Limb Exoskeleton Robot. In Proceedings of the Robotics and Mechatronics Conference (ROBOMEC 2009), Fukuoka, Japan, 24–26 May 2009. [Google Scholar]
- Li, Z.; Wang, B.; Sun, F.; Yang, C.; Xie, Q.; Zhang, W. sEMG-Based Joint Force Control for an Upper-Limb Power-Assist Exoskeleton Robot. IEEE J. Biomed. Health Inform. 2014, 18, 1043–1050. [Google Scholar] [PubMed]
- Rahman, M.H.; Ochoa-Luna, C.; Saad, M. EMG Based Control of a Robotic Exoskeleton for Shoulder and Elbow Motion Assist. J. Autom. Control. Eng. 2015, 3, 270–276. [Google Scholar] [CrossRef]
- Khezri, M.; Jahed, M. A Neuro–Fuzzy Inference System for sEMG-Based Identification of Hand Motion Commands. IEEE Trans. Ind. Electron. 2011, 58, 1952–1960. [Google Scholar] [CrossRef]
- Allard, U.C.; Nougarou, F.; Fall, C.L.; Giguère, P.; Gosselin, C.; Laviolette, F.; Gosselin, B. A convolutional neural network for robotic arm guidance using sEMG based frequency-features. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016. [Google Scholar]
- Oyama, T.; Mitsukura, Y.; Karungaru, S.G.; Tsuge, S.; Fukumi, M. Wrist EMG signals identification using neural network. In Proceedings of the 2009 35th Annual Conference of IEEE Industrial Electronics, Porto, Portugal, 3–5 November 2009. [Google Scholar]
- Chu, J.U.; Moon, I.; Mun, M.-S. A Real-Time EMG Pattern Recognition System Based on Linear-Nonlinear Feature Projection for a Multifunction Myoelectric Hand. IEEE Trans. Biomed. Eng. 2006, 53, 2232–2239. [Google Scholar] [PubMed]
- Shenoy, P.; Miller, K.J.; Crawford, B.; Rao, R.P.N. Online electromyographic control of a robotic prosthesis. IEEE Trans. Biomed. Eng. 2008, 55, 1128–1135. [Google Scholar] [CrossRef] [PubMed]
- Feix, T.; Romero, J.; Schmiedmayer, H.-B.; Dollar, A.M.; Kragic, D. The GRASP Taxonomy of Human Grasp Types. IEEE Trans. Hum. Mach. Syst. 2016, 46, 66–77. [Google Scholar] [CrossRef]
- Smith, J. Machine Learning with Neural Networks Using MATLAB; CreateSpace Independent Publishing Platform: Lexington, KY, USA, 2017. [Google Scholar]
- The MathWorks, Inc. Tansig. 2019. Available online: https://www.mathworks.com/help/deeplearning/ref/tansig.html (accessed on 29 June 2019).
- Tomaszewski, M. Myo SDK MATLAB MEX Wrapper. 18 October 2017. Available online: https://www.mathworks.com/matlabcentral/fileexchange/55817-myo-sdk-matlab-mex-wrapper (accessed on 16 March 2018).
- Desai, J.; Schabron, B.; Yihun, Y. Force Myography Controlled Intelligent Assistive Wheelchair-Mounted Robotic Exoskeleton for Arm Movements. In Proceedings of the 2019 IEEE International Symposium on Measurement and Control in Robotics (ISMCR), Houston, TX, USA, 19–21 September 2019; pp. D2-5-1–D2-5-5. [Google Scholar]
- Stroh, A.; Desai, J. Human-Centered Deep Learning Neural Network Trained Myoelectric Controller for a Powered Wheelchair. In Proceedings of the 2019 IEEE International Symposium on Measurement and Control in Robotics (ISMCR), Houston, TX, USA, 19–21 September 2019; pp. D2-4-1–D2-4-4. [Google Scholar]
- Schabron, B.; Reust, A.; Desai, J.; Yihun, Y. Integration of Forearm sEMG Signals with IMU Sensors for Trajectory Planning and Control of Assistive Robotic Arm. In Proceedings of the 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; pp. 5274–5277. [Google Scholar]
- Lee, H.; Kim, W.; Han, J.; Han, C. The Technical Trend of the Exoskeleton Robot System for Human Power Assistance. Int. J. Precis. Eng. Manuf. 2012, 13, 1491–1497. [Google Scholar] [CrossRef]
- Delgado, P.; Sajja, A.; Majidirad, A.; Hakansson, N.A.; Desai, J.; Yihun, Y. Shoulder Kinematics Assessment towards Exoskeleton Development. Appl. Sci. 2020, 10, 6336. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subject # | Training Accuracy % | Validation Accuracy % | Testing Accuracy % | Overall Accuracy % |
|---|---|---|---|---|
| 1 | 92.3 | 91.5 | 91.1 | 92.0 |
| 2 | 90.2 | 90.4 | 89.9 | 90.2 |
| 3 | 97.6 | 97.5 | 96.7 | 97.4 |
| 4 | 96.4 | 96.2 | 95.7 | 96.3 |
| 5 | 90.9 | 90.0 | 90.1 | 90.8 |
| 6 | 89.3 | 87.5 | 89.0 | 89.1 |
| 7 | 89.9 | 91.1 | 89.9 | 89.9 |
| 8 | 87.8 | 88.6 | 87.6 | 87.7 |
| Subject # | Completion Time (sec) |
|---|---|
| 1 | 27.7 |
| 2 | 21.2 |
| 3 | 62.6 |
| 4 | 51.2 |
| 5 | 15.3 |
| 6 | 39.4 |
| 7 | 24.2 |
| 8 | 49.2 |
| Motion/Task | Elbow Flex/Ext % | Shoulder Flex/Ext % | Shoulder Horizontal Abd/Add % | Water Bottle Pick & Place % |
|---|---|---|---|---|
| Elbow Flex | 30 | 14 | 16 | 15 |
| Elbow Ext | 20 | 2 | 3 | 7 |
| Shoulder Flex | 10 | 37 | 5 | 20 |
| Shoulder Ext | 5 | 31 | 3 | 5 |
| Shoulder Horizontal Abd | 17 | 10 | 35 | 28 |
| Shoulder Horizontal Add | 16 | 6 | 37 | 30 |
| Subjective Feedback Questions | Average Score (0–5) |
|---|---|
| Bending exoskeleton elbow joint inward | 3.75 |
| Straightening out exoskeleton elbow joint | 3.25 |
| Bending exoskeleton shoulder joint inward | 4.125 |
| Straightening out exoskeleton shoulder joint | 3.375 |
| Rotating inward (towards body) exoskeleton shoulder joint | 2.875 |
| Rotating out (away from body) exoskeleton shoulder joint | 3.125 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schabron, B.; Desai, J.; Yihun, Y. Wheelchair-Mounted Upper Limb Robotic Exoskeleton with Adaptive Controller for Activities of Daily Living. Sensors 2021, 21, 5738. https://doi.org/10.3390/s21175738
Schabron B, Desai J, Yihun Y. Wheelchair-Mounted Upper Limb Robotic Exoskeleton with Adaptive Controller for Activities of Daily Living. Sensors. 2021; 21(17):5738. https://doi.org/10.3390/s21175738
Chicago/Turabian StyleSchabron, Bridget, Jaydip Desai, and Yimesker Yihun. 2021. "Wheelchair-Mounted Upper Limb Robotic Exoskeleton with Adaptive Controller for Activities of Daily Living" Sensors 21, no. 17: 5738. https://doi.org/10.3390/s21175738
APA StyleSchabron, B., Desai, J., & Yihun, Y. (2021). Wheelchair-Mounted Upper Limb Robotic Exoskeleton with Adaptive Controller for Activities of Daily Living. Sensors, 21(17), 5738. https://doi.org/10.3390/s21175738