
Portable Micro-Doppler Radar with Quadrature Radar Architecture for Non-Contact Human Breath Detection


Abstract
:1. Introduction
- The use of directional Vivaldi antennas can minimize clutter around the radar, thereby improving the quality of breathing detection.
- Human breathing detection up to a distance of 2 m with low USRP power, i.e., 0.33 mW.
- Phase-noise reduction, as the USRP B200mini module can help to reduce phase noise generated by leakage currents in electronic components.
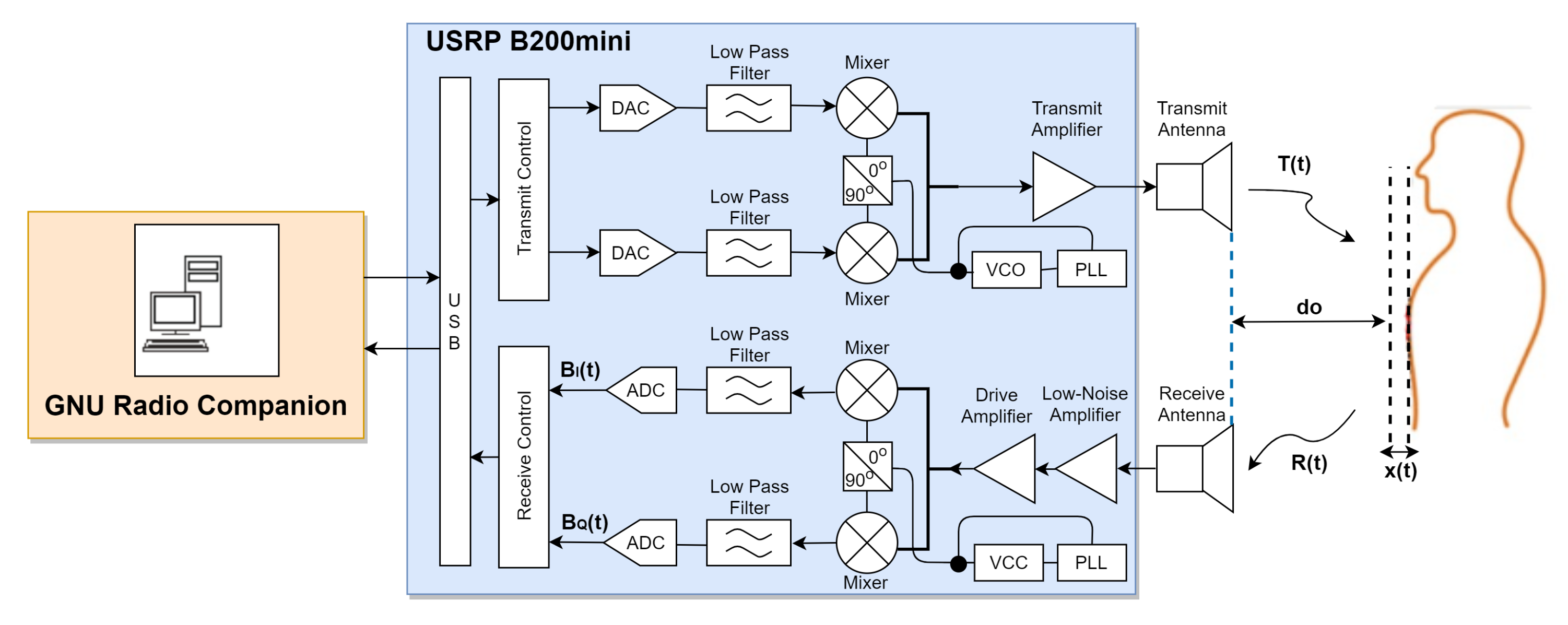
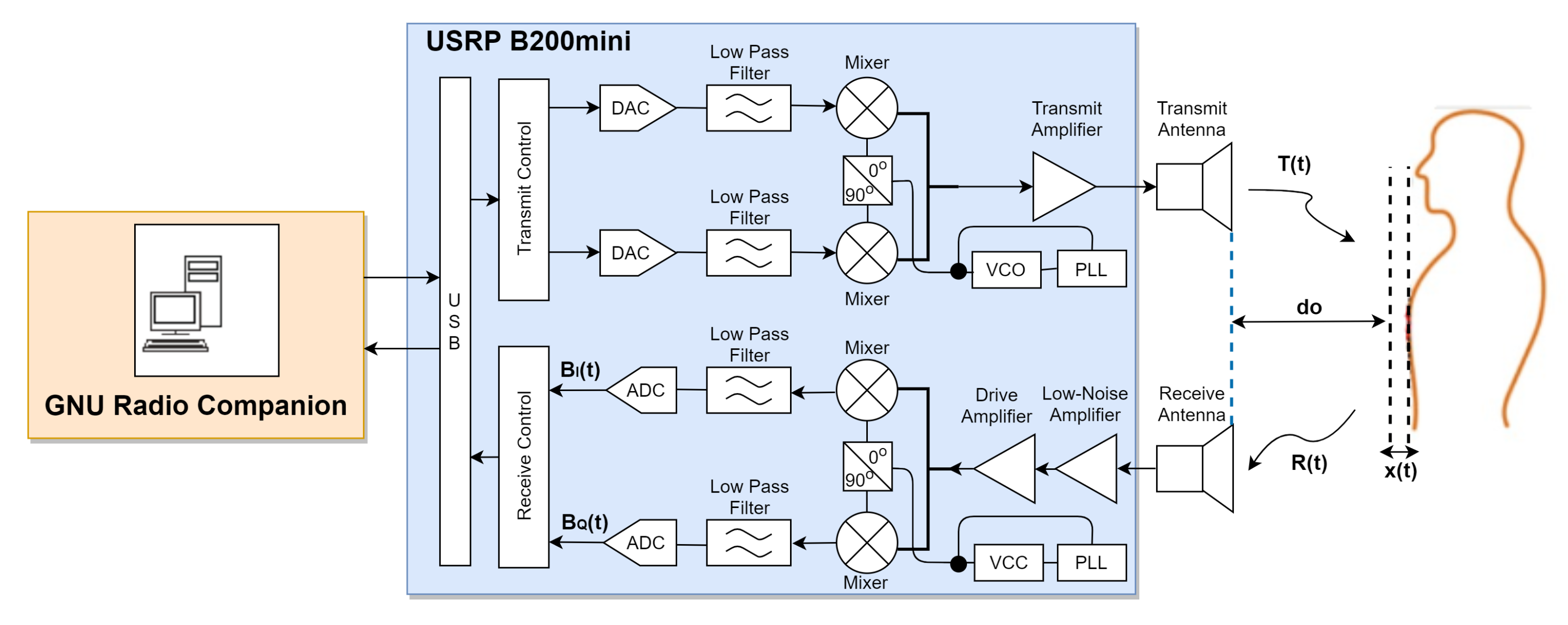
2. Quadrature Doppler Radar
3. System Design
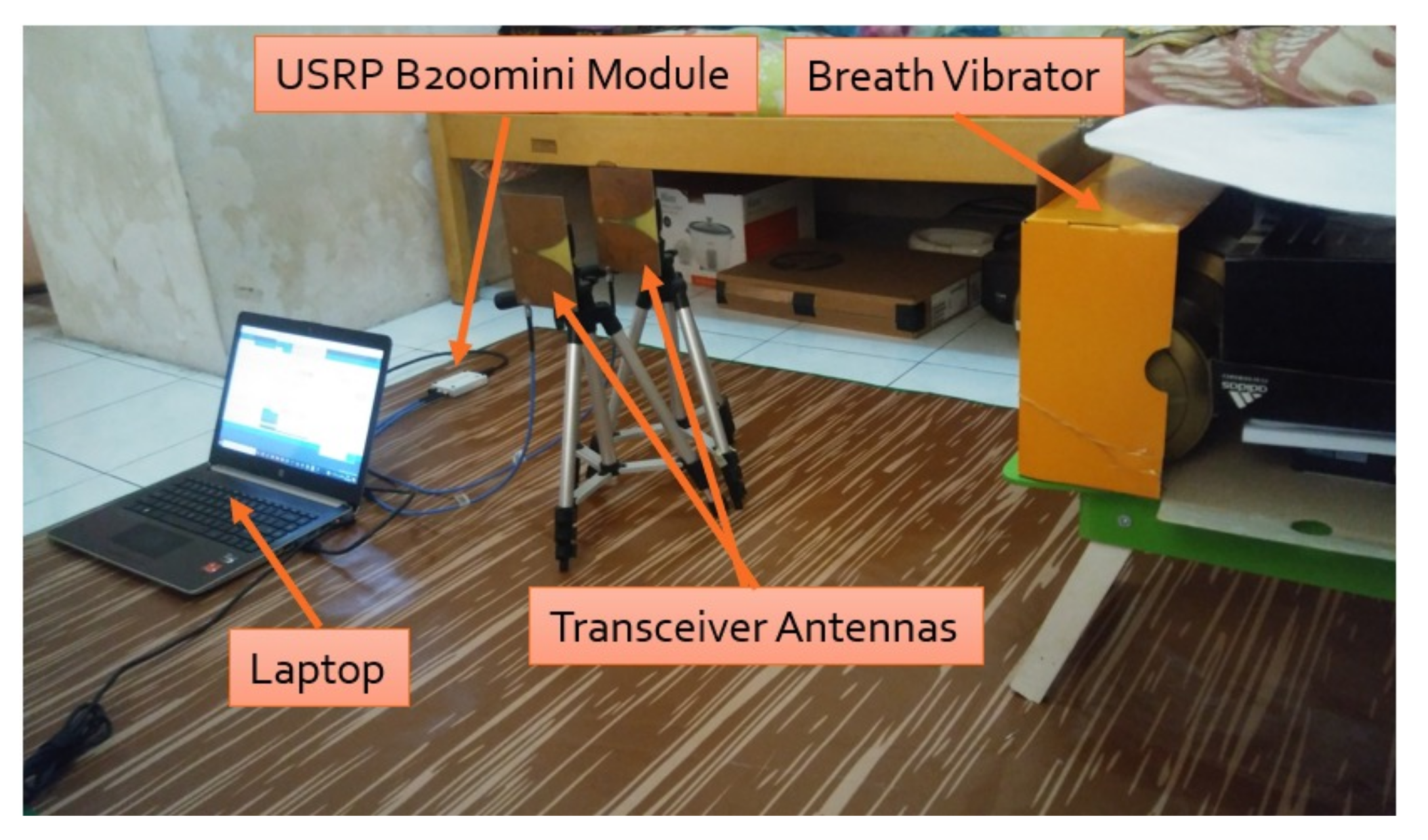
3.1. USRP B200mini Device
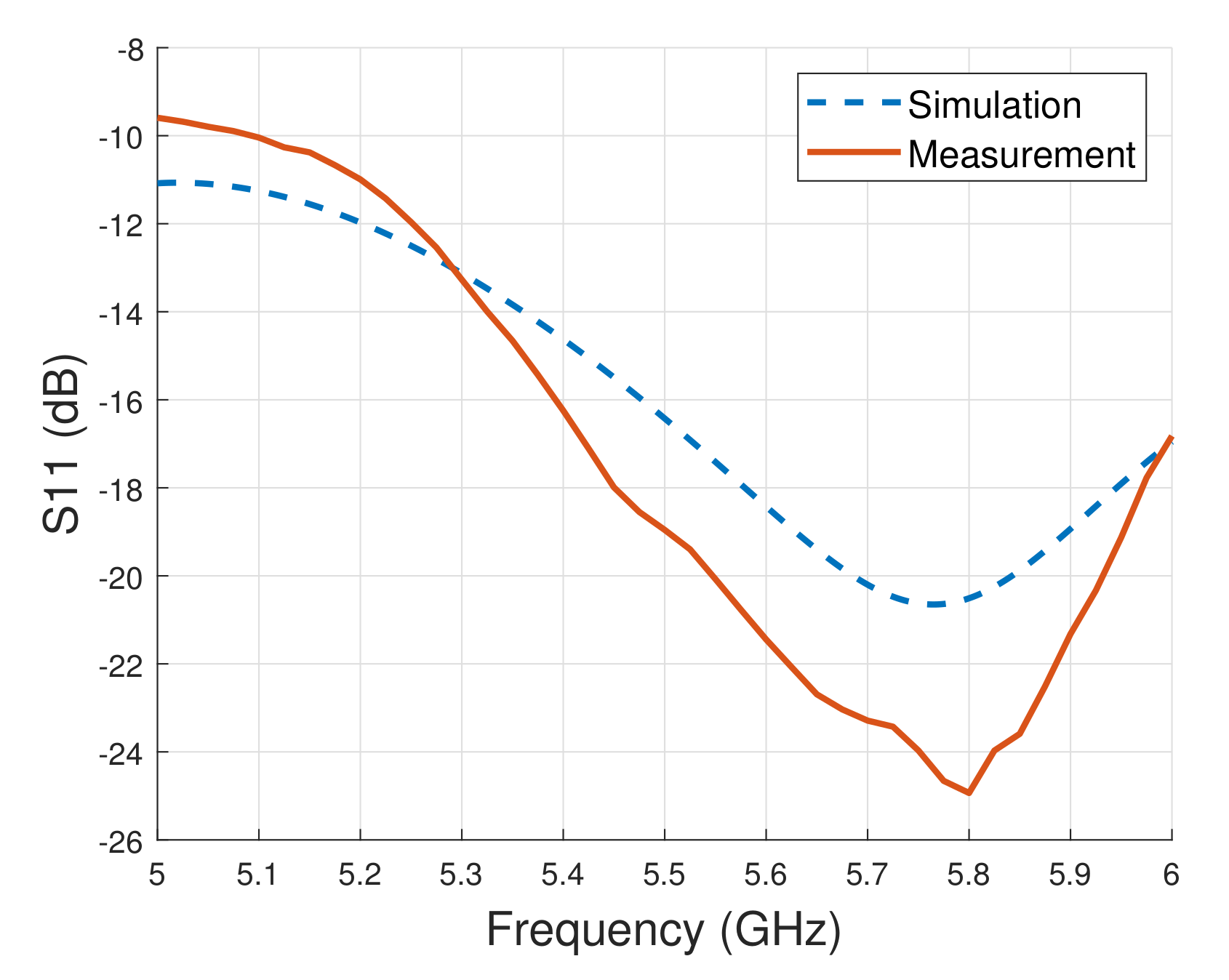
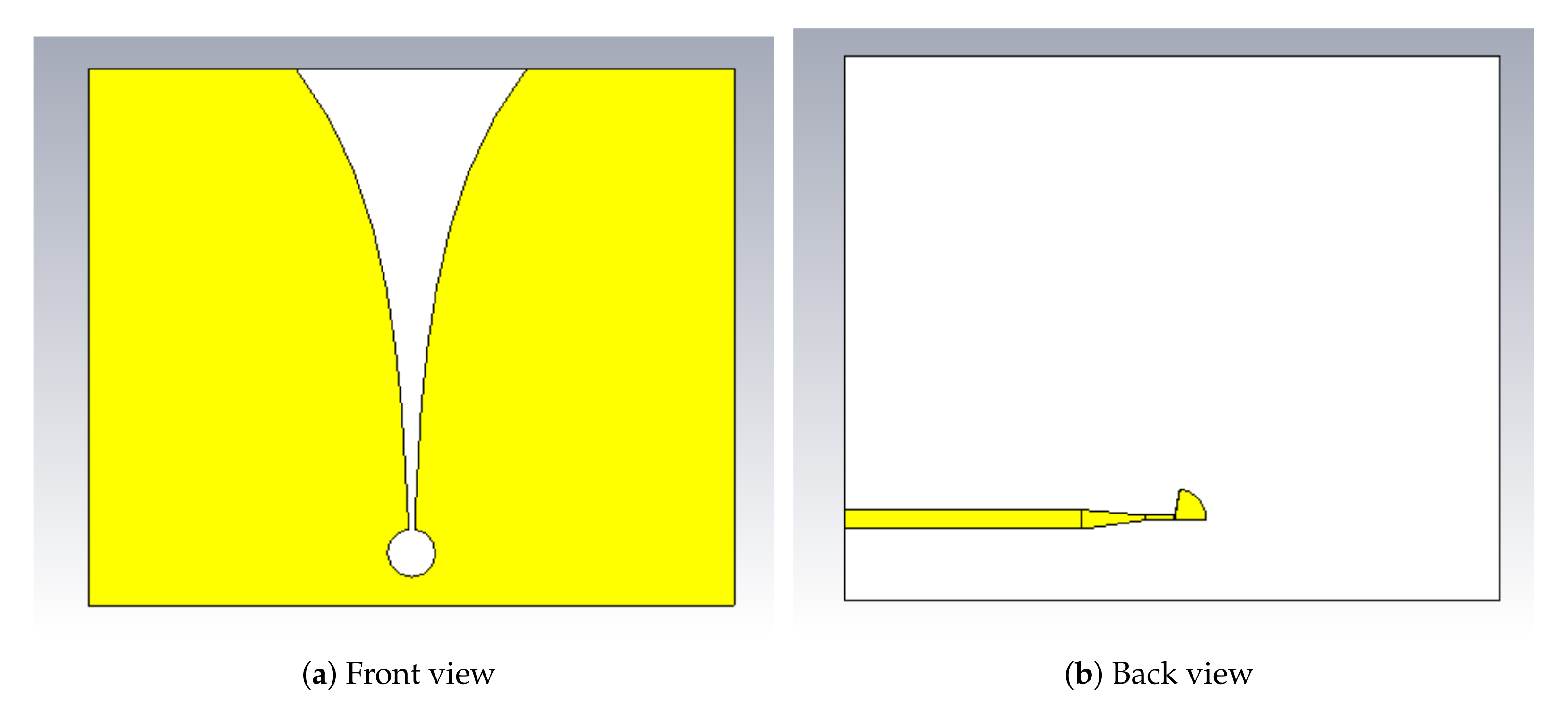
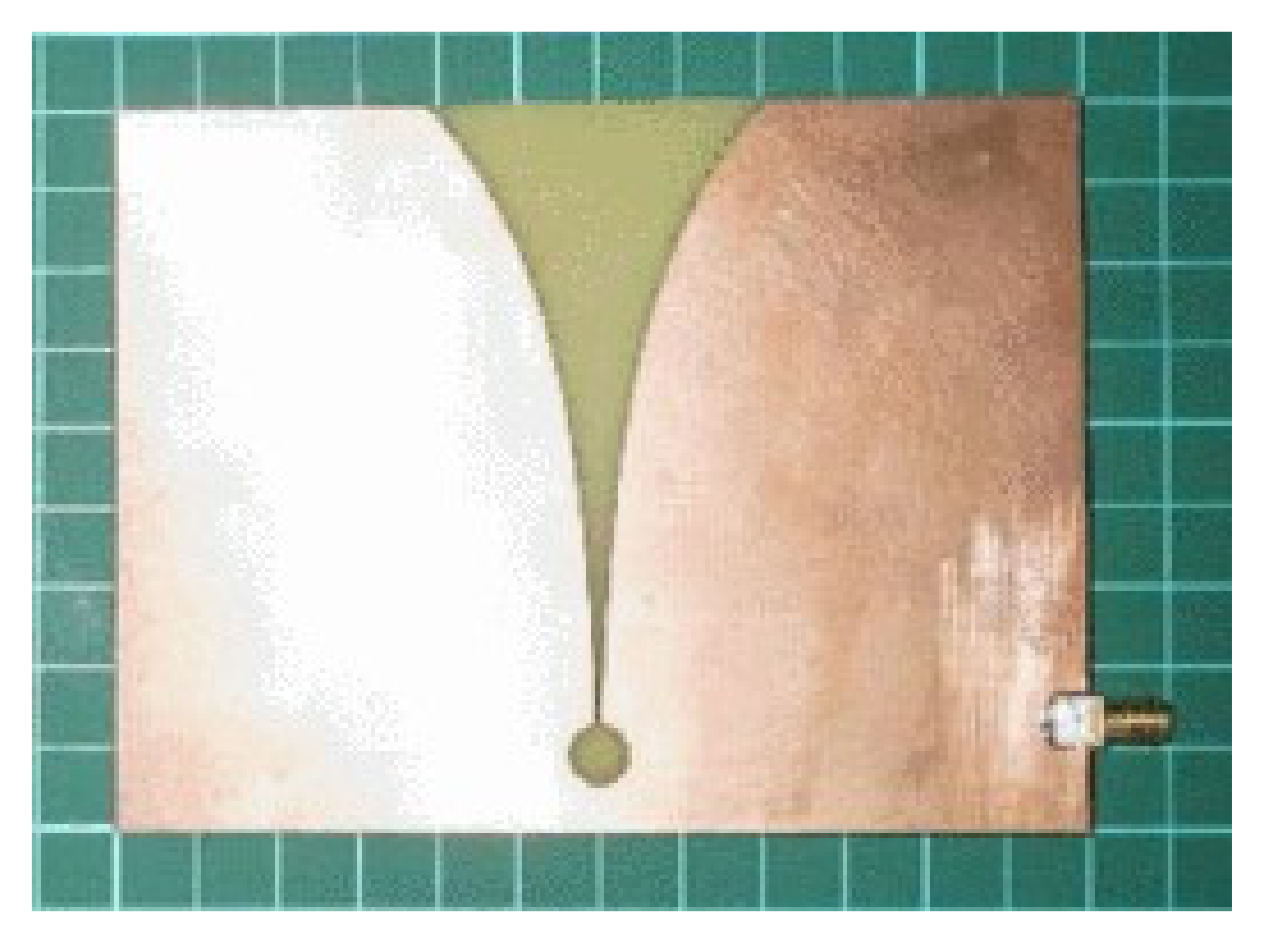
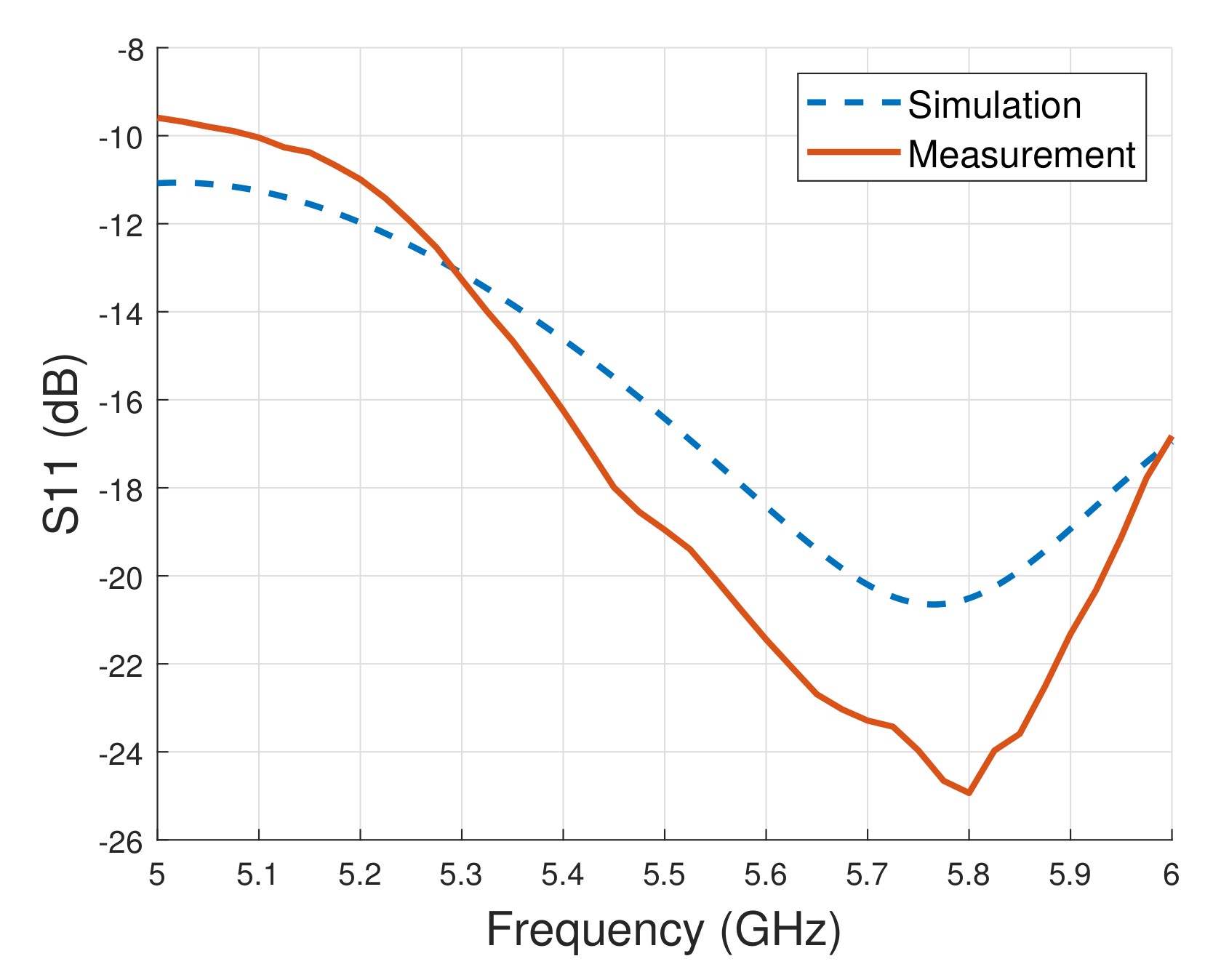
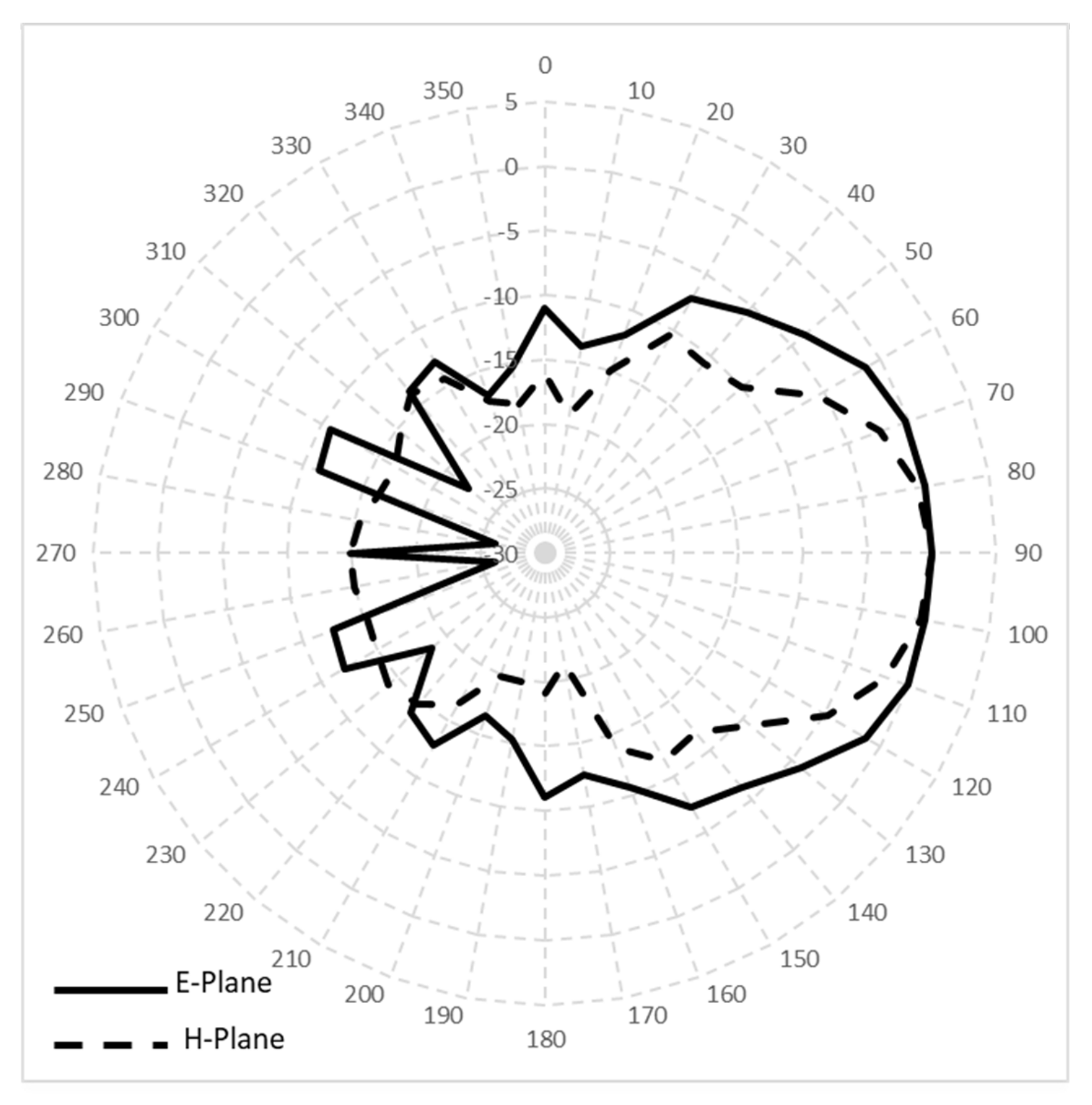
3.2. Vivaldi Antenna
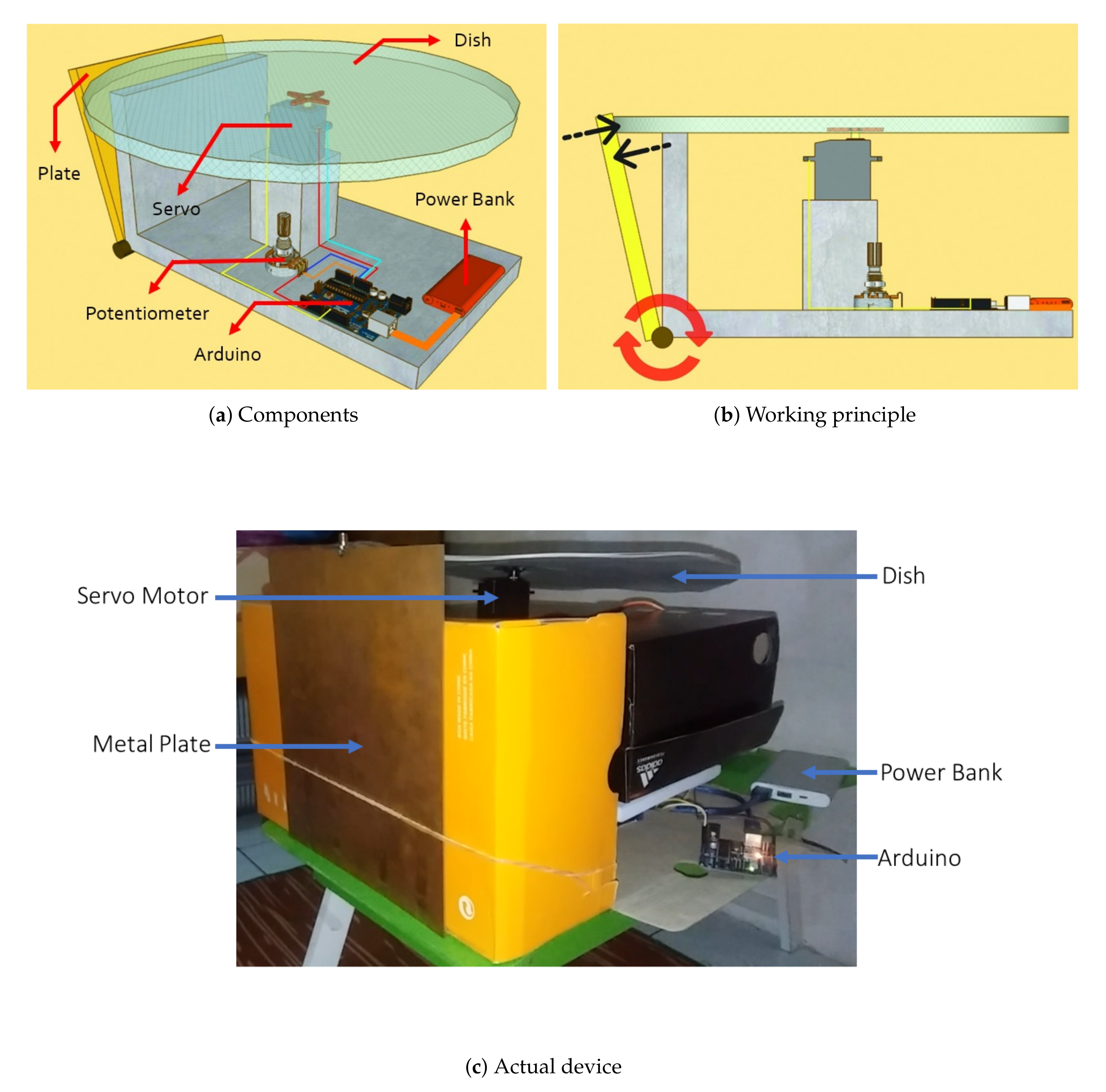
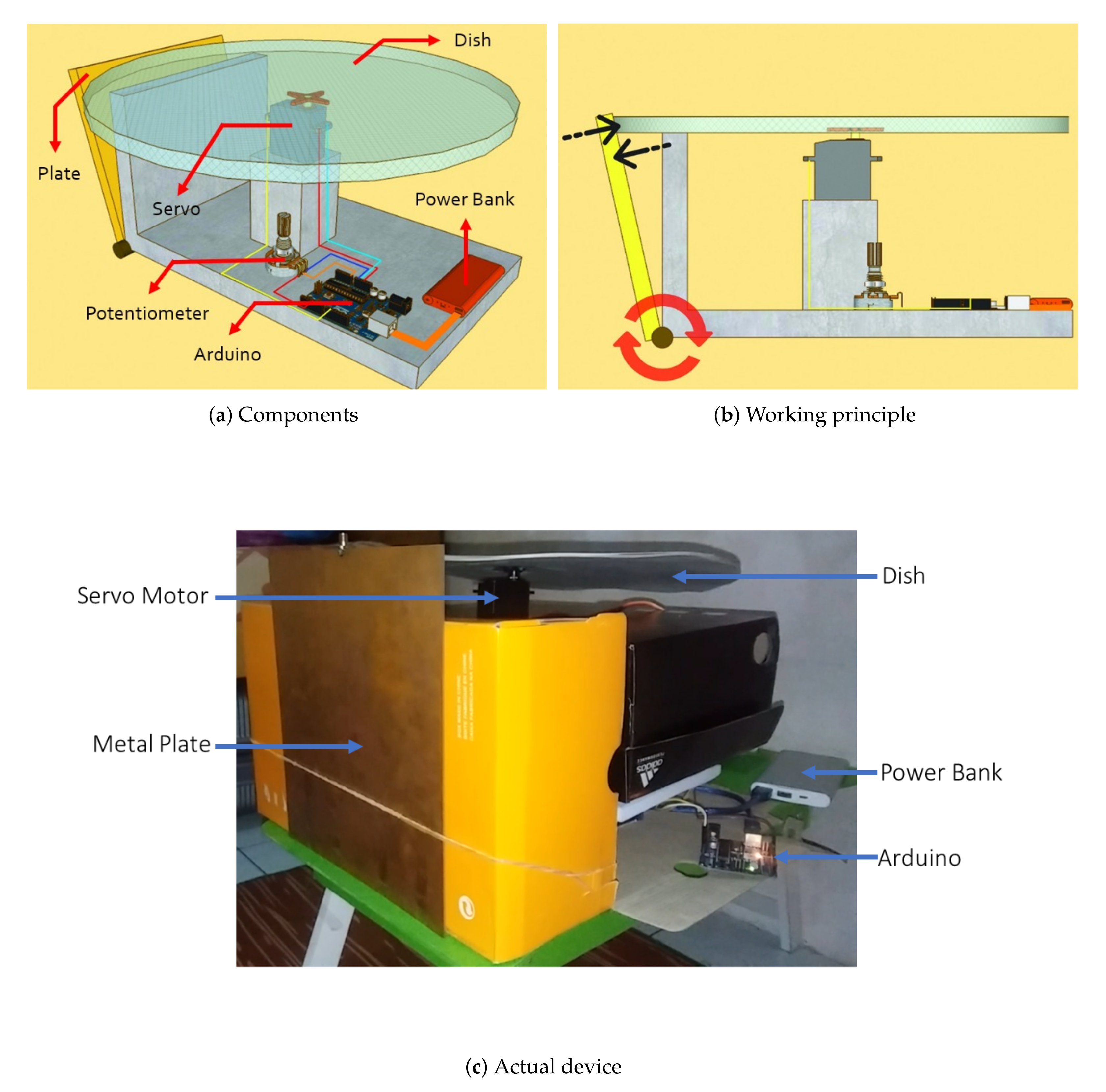
3.3. Breath Vibrator
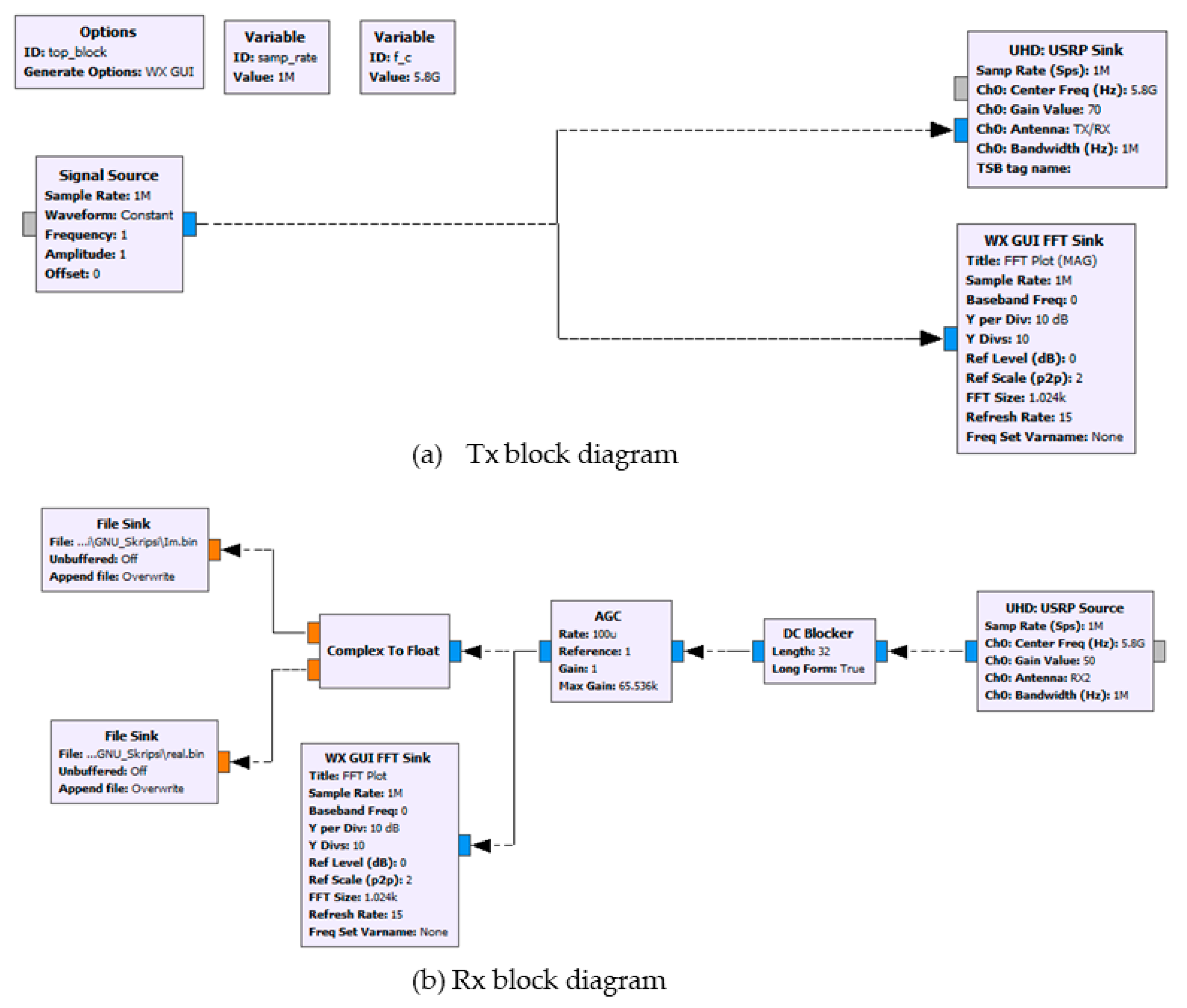
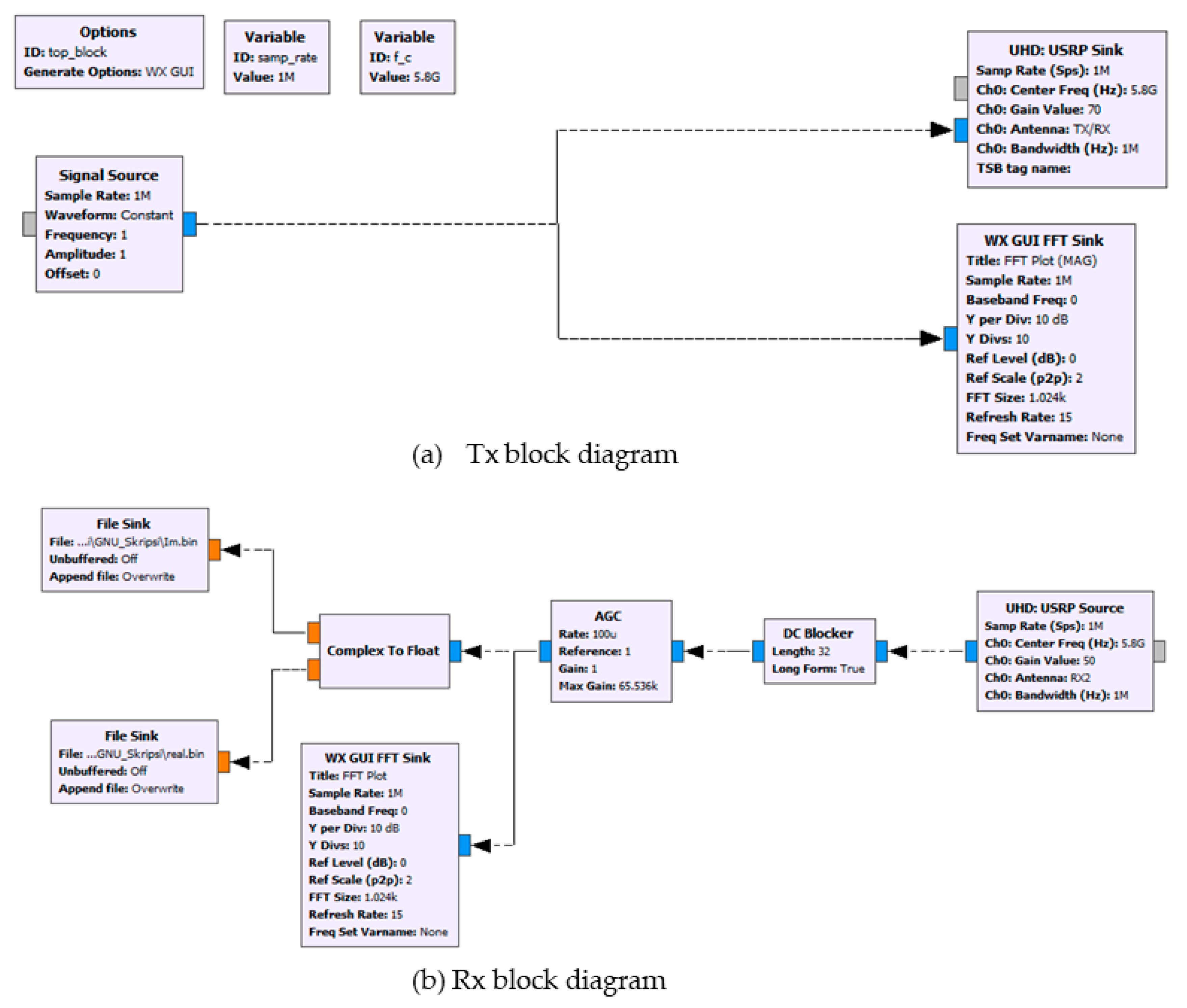
3.4. GNU Radio Companion
4. Results and Discussion
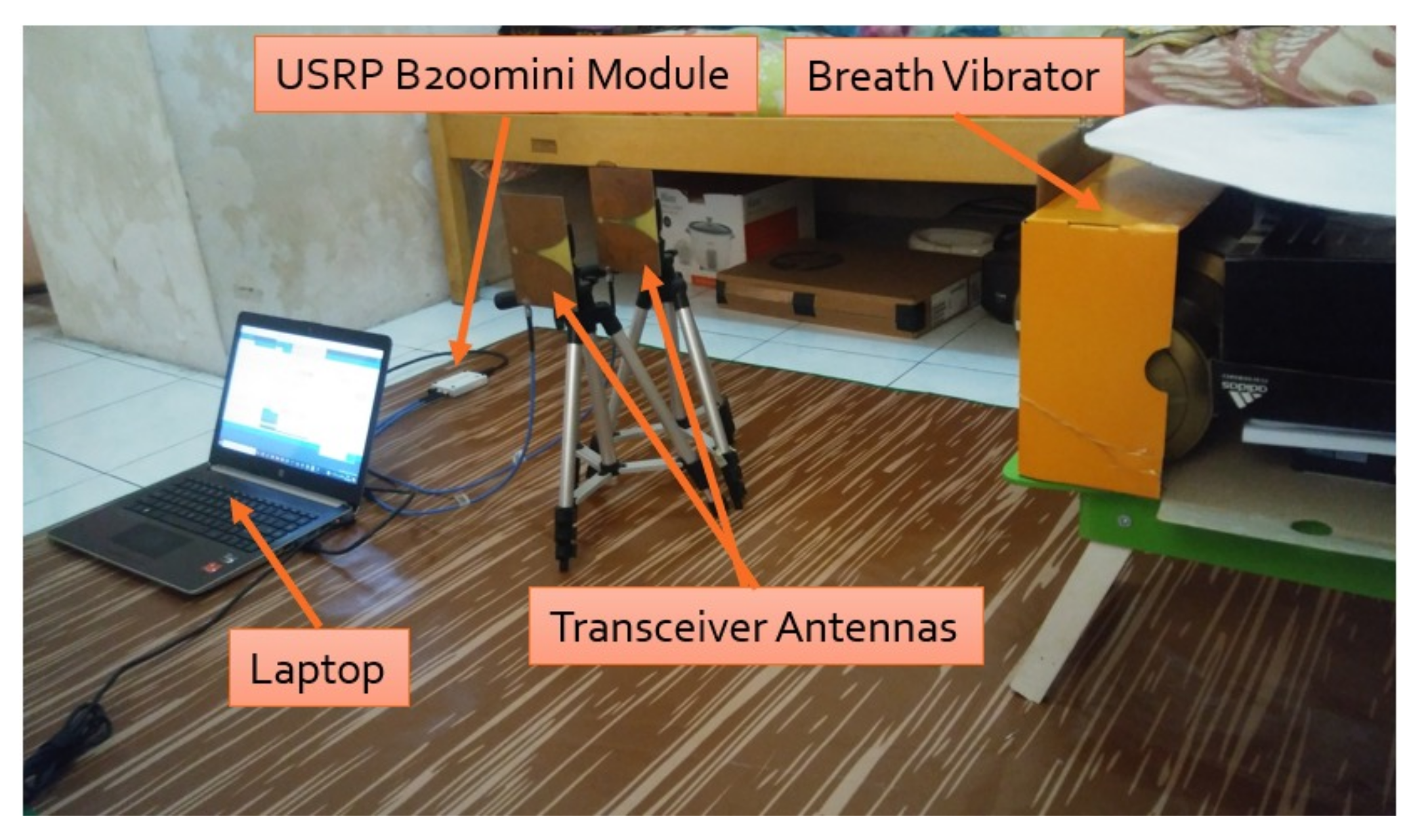
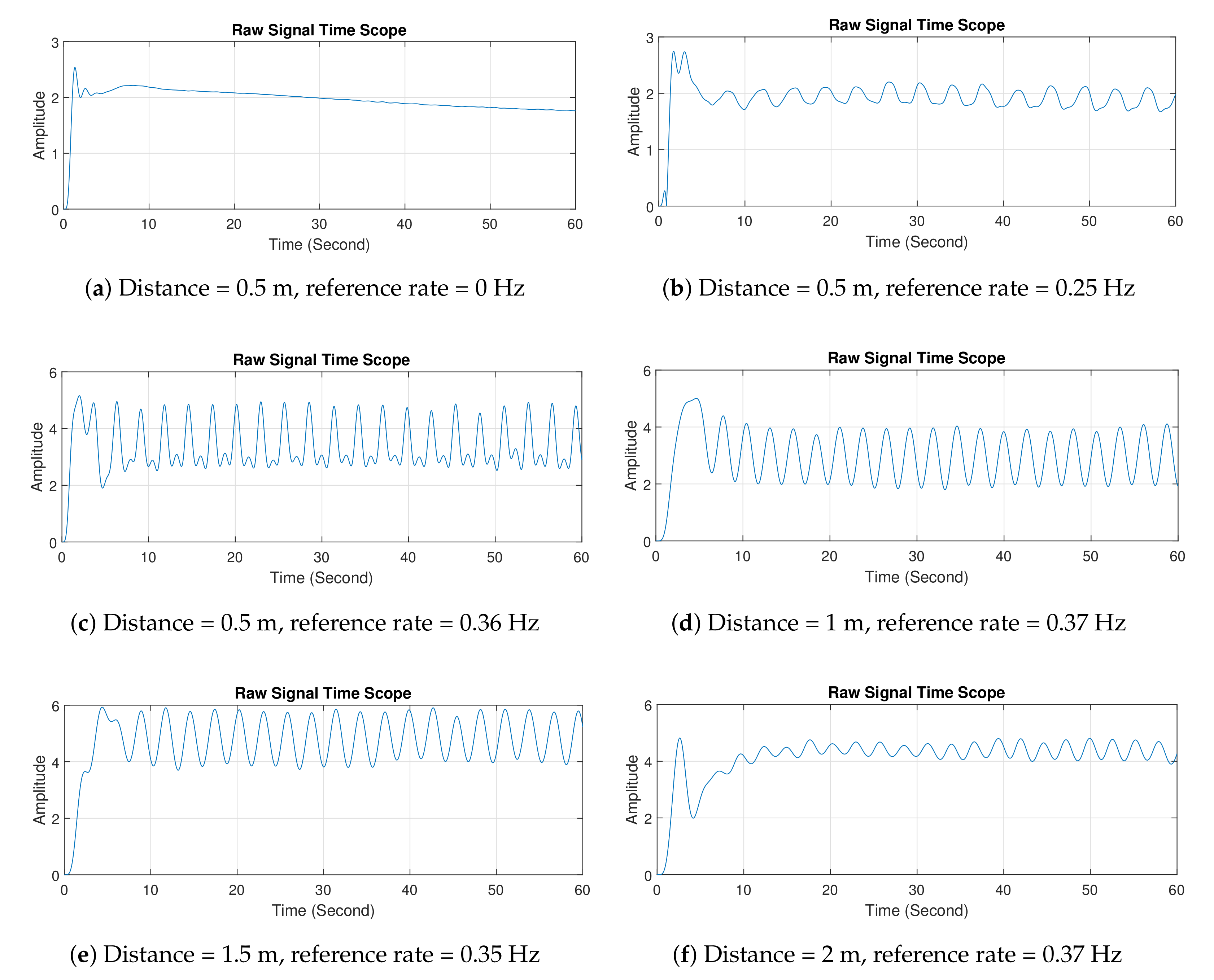
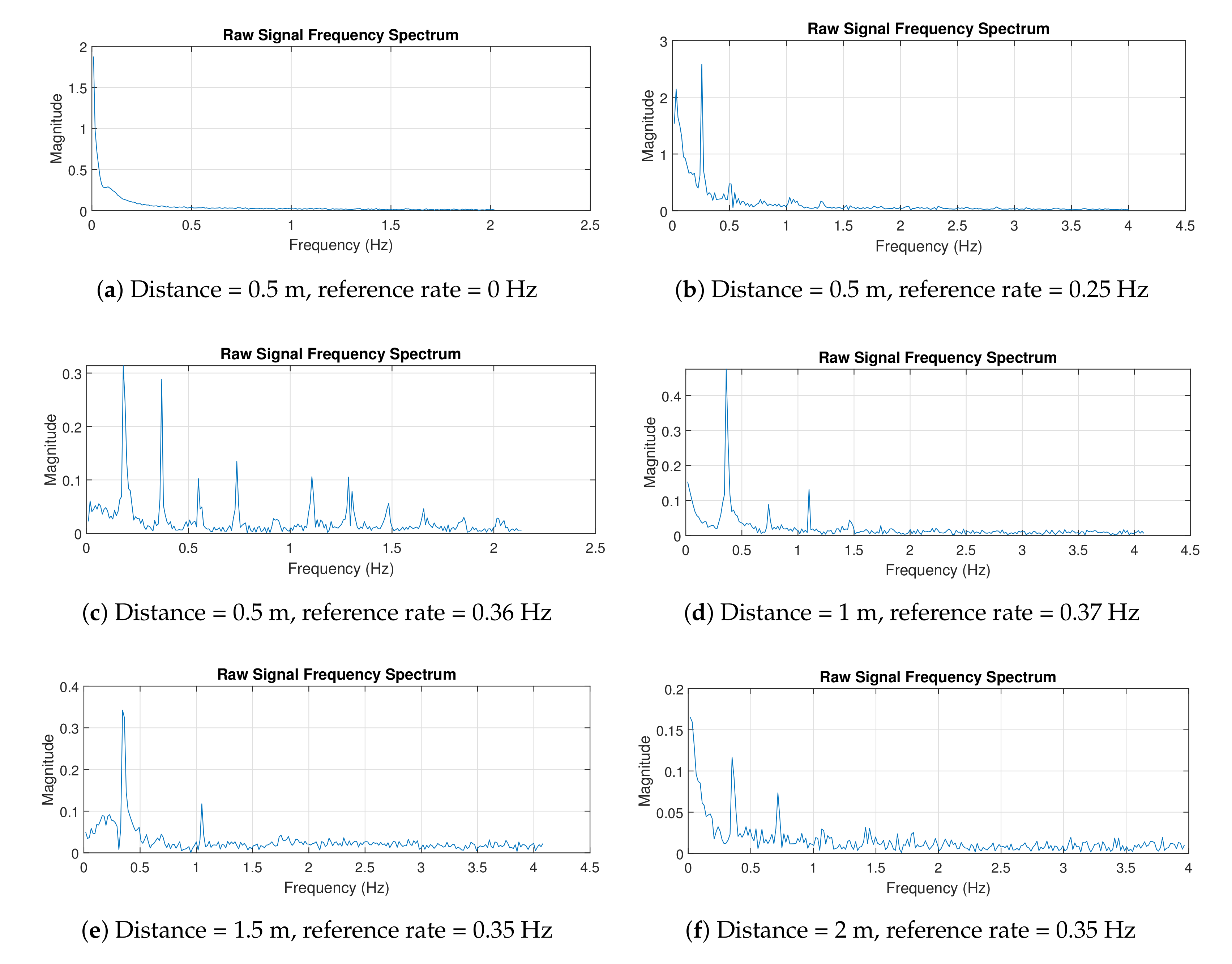
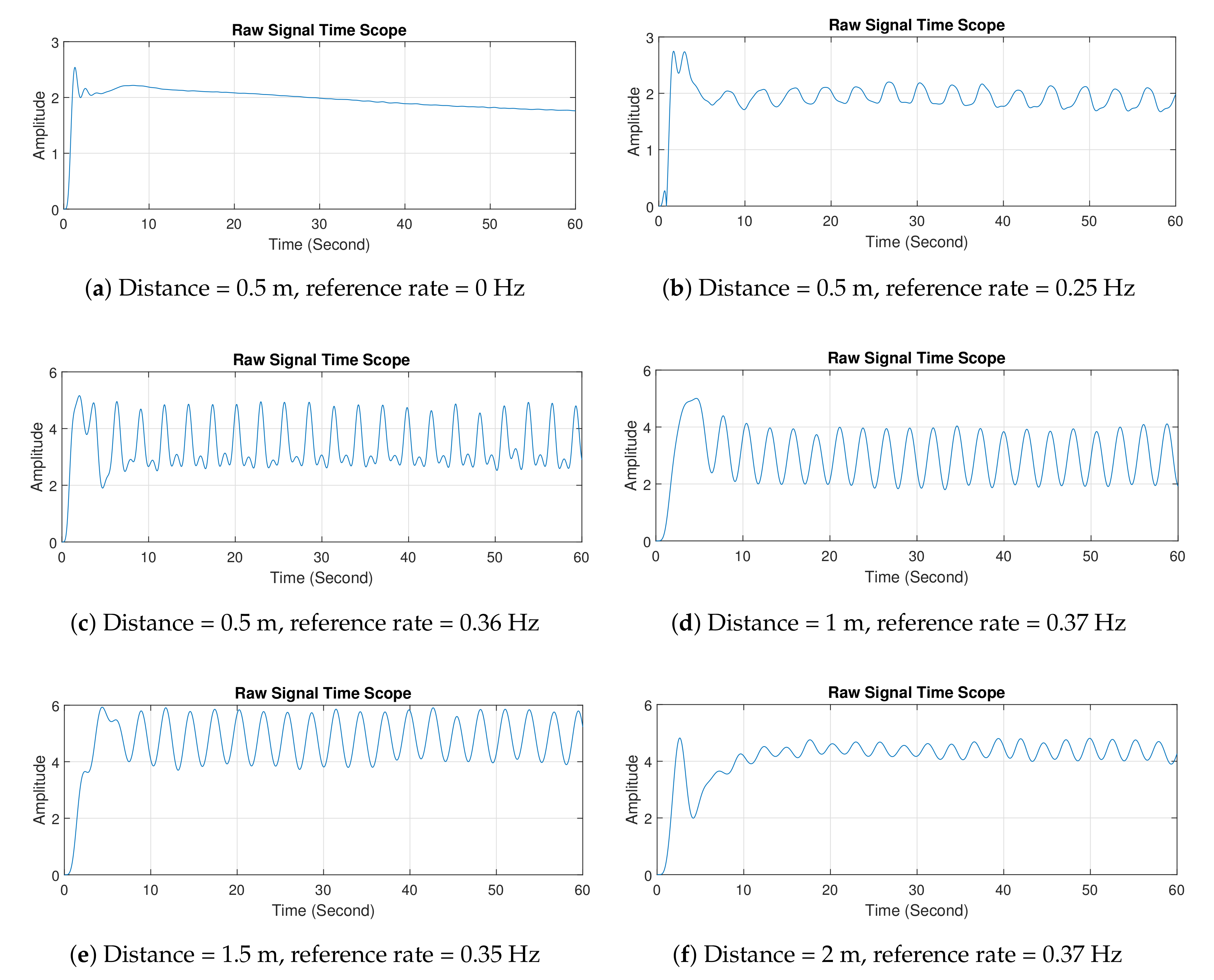
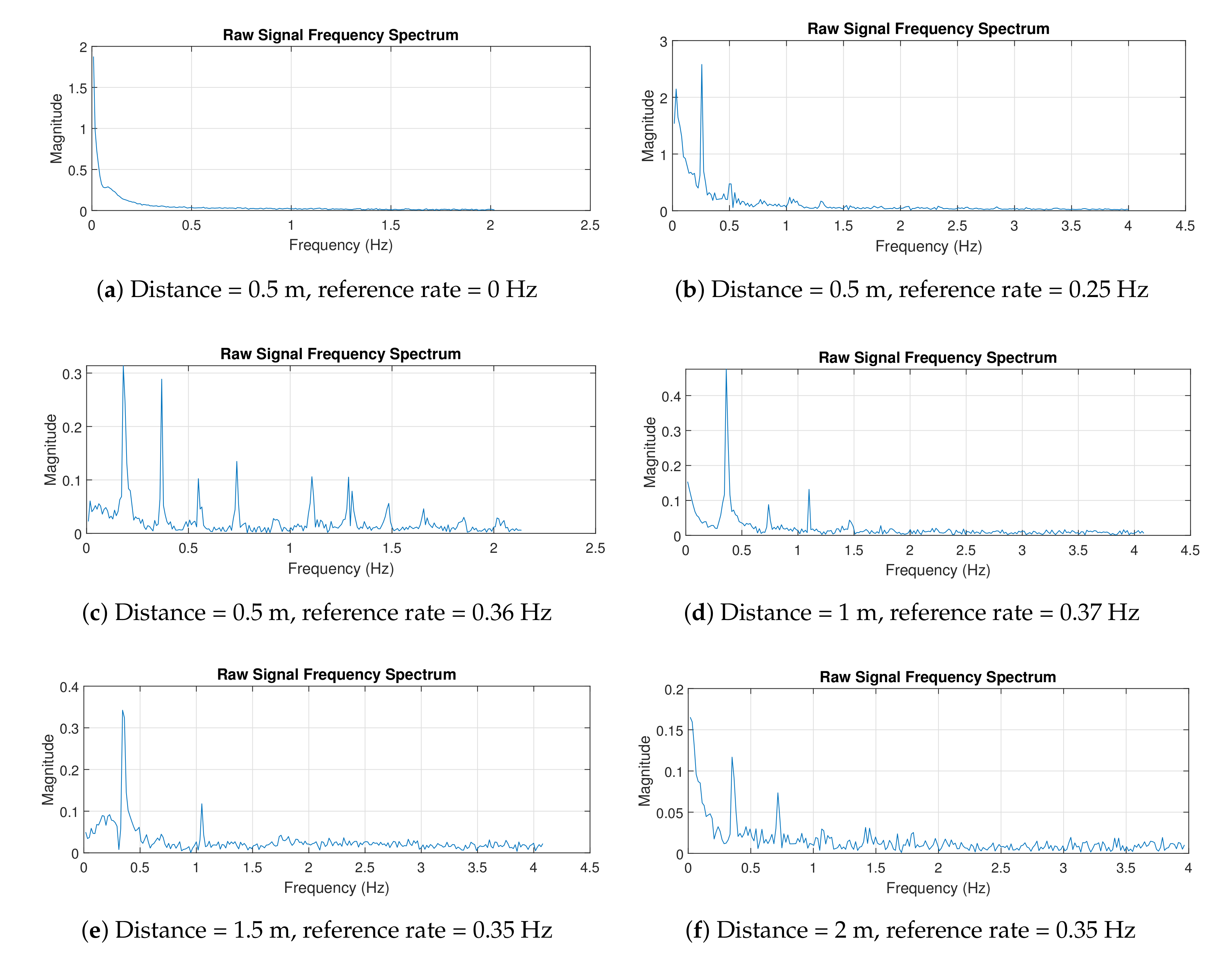
4.1. Experiment 1: Using the Breath Vibrator
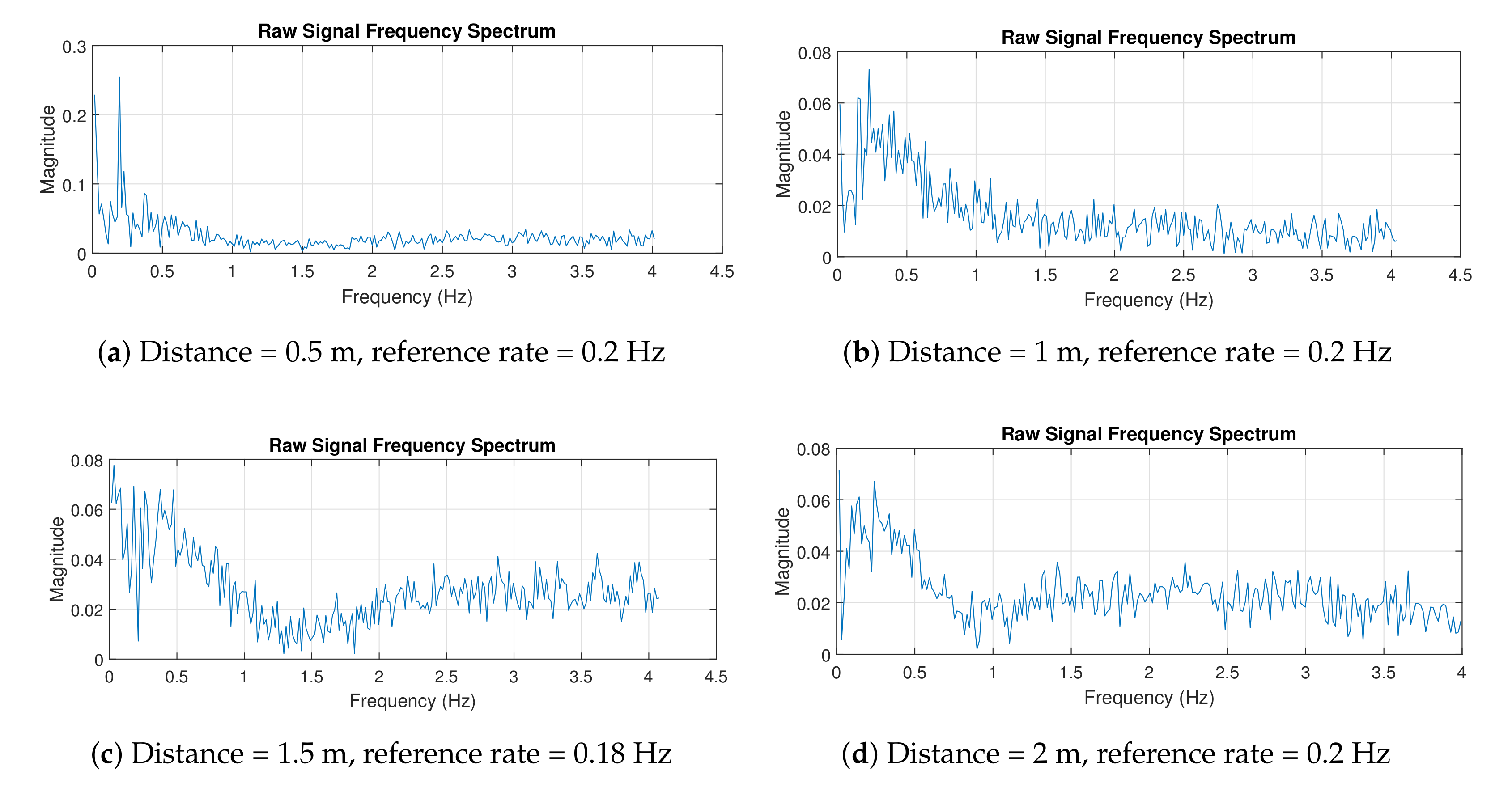
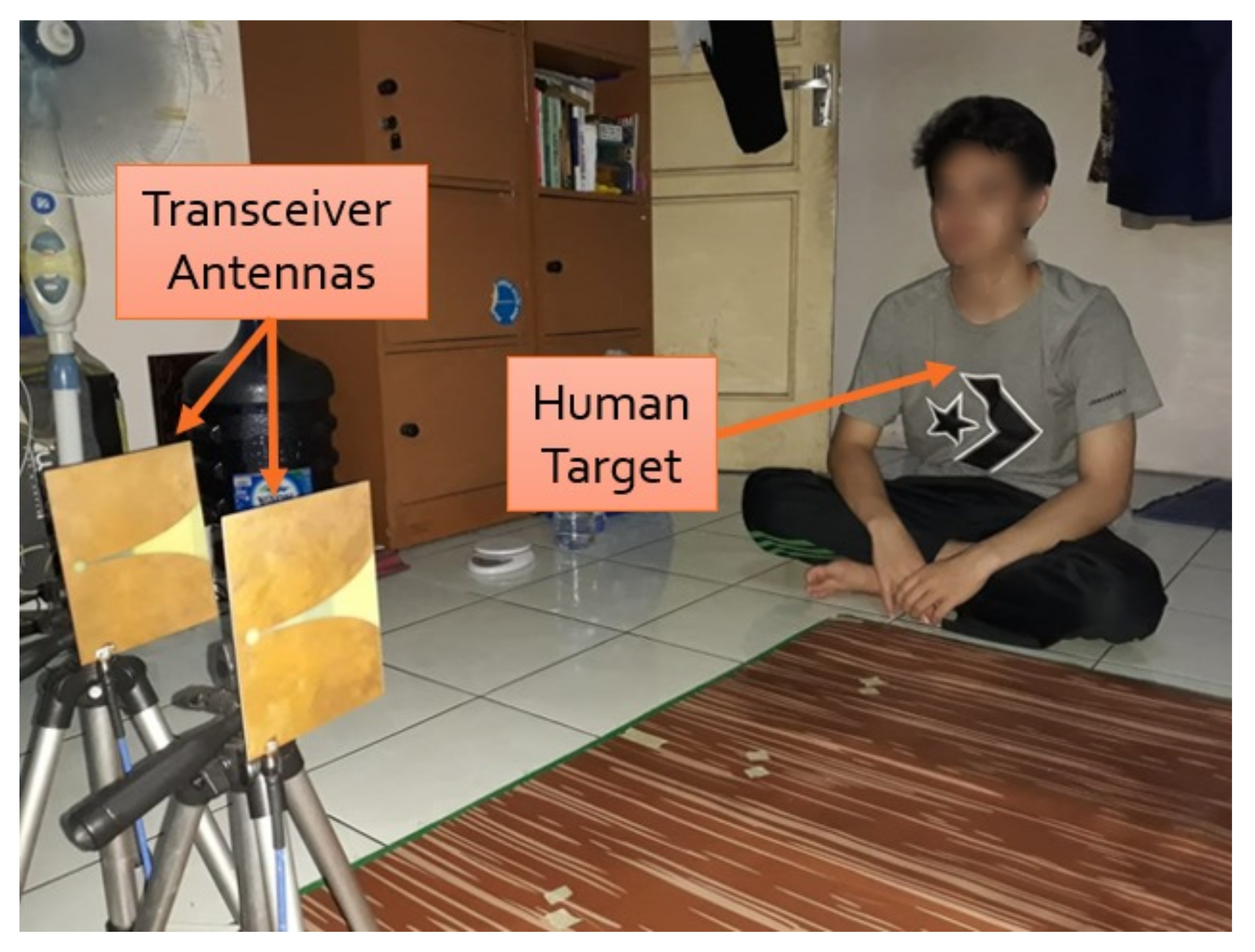
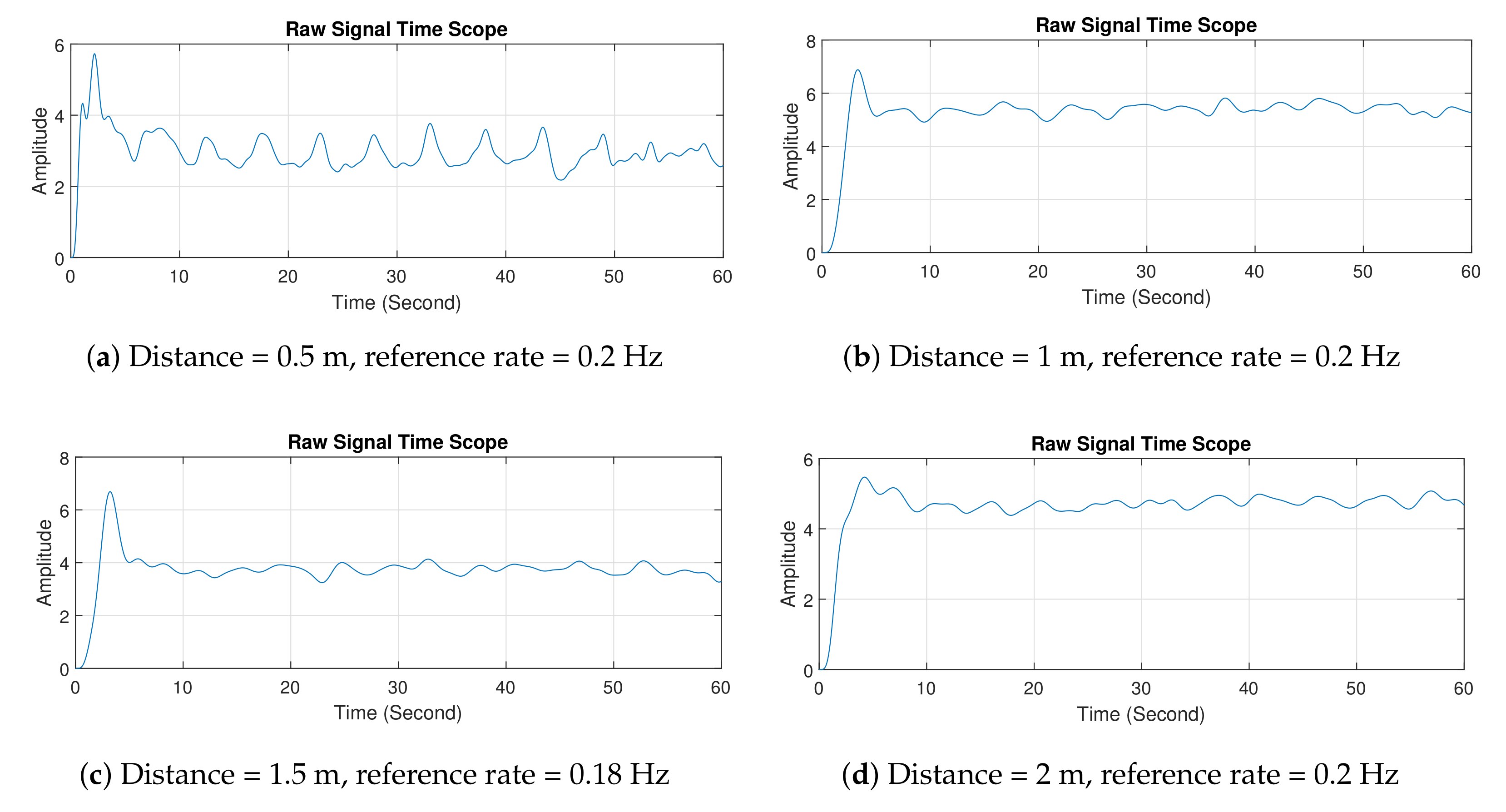
4.2. Experiment 2: Using Human Target
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Skolnik, M. Role of radar in microwaves. IEEE Trans. Microw. Theory Tech. 2002, 50, 625–632. [Google Scholar] [CrossRef] [Green Version]
- Islam, S.M.M.; Borić-Lubecke, O.; Zheng, Y.; Lubecke, V.M. Radar-Based Non-Contact Continuous Identity Authentication. Remote Sens. 2020, 12, 2279. [Google Scholar] [CrossRef]
- Pisa, S.; Pittella, E.; Piuzzi, E. A survey of radar systems for medical applications. IEEE Aerosp. Electron. Syst. Mag. 2016, 31, 64–81. [Google Scholar] [CrossRef]
- Mastela, D.; Reindl, L.; Wiebking, L.; Kawalkiewicz, M.; Zander, T. Angle tracking using FMCW radar based localization system (Industrial, environmental and medical applications). In Proceedings of the 2006 International Conference on Microwaves, Radar Wireless Communications, Warsaw, Poland, 22–24 May 2006; pp. 29–32. [Google Scholar] [CrossRef]
- Sun, G. Non-contact Vital Sign Measurement with Medical Radar and its Clinical Applications. In Proceedings of the 2019 3rd International Conference on Recent Advances in Signal Processing, Telecommunications Computing (SigTelCom), Hanoi, Vietnam, 21–22 March 2019; pp. 90–92. [Google Scholar] [CrossRef]
- Neely, R.; Naishadham, K.; Sharma, A.; Bing, K. Electromagnetic human body modeling with physiological motion for radar applications. In Proceedings of the 2012 IEEE Radar Conference, Atlanta, GA, USA, 7–11 May 2012; pp. 0818–0823. [Google Scholar] [CrossRef]
- Chang, W.; Chen, K.; Yang, C. Noise Tolerable Vital Sign Detection Using Phase Accumulated Demodulation for FMCW Radar System. In Proceedings of the 2018 IEEE International Microwave Biomedical Conference (IMBioC), Philadelphia, PA, USA, 14–15 June 2018; pp. 61–63. [Google Scholar] [CrossRef]
- Rong, Y.; Bliss, D.W. Remote Sensing for Vital Information Based on Spectral-Domain Harmonic Signatures. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3454–3465. [Google Scholar] [CrossRef]
- Sun, L.; Huang, S.; Li, Y.; Gu, C.; Pan, H.; Hong, H.; Zhu, X. Remote Measurement of Human Vital Signs Based on Joint-Range Adaptive EEMD. IEEE Access 2020, 8, 68514–68524. [Google Scholar] [CrossRef]
- Duan, Z.; Liang, J. Non-Contact Detection of Vital Signs Using a UWB Radar Sensor. IEEE Access 2019, 7, 36888–36895. [Google Scholar] [CrossRef]
- Zhenhe, F.; Jun, Z.; Yi, W. The HAL-3 airborne navigation radar. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 1208–1211. [Google Scholar] [CrossRef]
- Schouten, G.; Steckel, J. A Biomimetic Radar System for Autonomous Navigation. IEEE Trans. Robot. 2019, 35, 539–548. [Google Scholar] [CrossRef]
- Reich, G.M.; Antoniou, M.; Baker, C.J. Memory-enhanced cognitive radar for autonomous navigation. IET Radar Sonar Navig. 2020, 14, 1287–1296. [Google Scholar] [CrossRef]
- Ikram, M.Z.; Ahmad, A. Automated Radar Mount-Angle Calibration in Automotive Applications. In Proceedings of the 2019 IEEE Radar Conference (RadarConf), Boston, MA, USA, 22–26 April 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Rincon, R.F.; Lu, D.; Perrine, M.; du Toit, C.F.; Carter, L.M. Beamforming P-band synthetic aperture radar for planetary applications. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018; pp. 1487–1490. [Google Scholar] [CrossRef] [Green Version]
- Lin, J.C.; Salinger, J. Microwave Measurement of Respiration. In Proceedings of the 1975 IEEE-MTT-S International Microwave Symposium, Palo Alto, CA, USA, 12–14 May 1975; pp. 285–287. [Google Scholar] [CrossRef]
- Benchikh, S.; Arab, H.; Tatu, S.O. A Novel Millimeter Wave Radar Sensor for Medical Signal Detection. In Proceedings of the 2018 IEEE International Microwave Biomedical Conference (IMBioC), Philadelphia, PA, USA, 14–15 June 2018; pp. 142–144. [Google Scholar] [CrossRef]
- Marnach, A.; Schmiech, D.; Diewald, A.R. Verification of Algorithm for an I/Q-Radar System for Breathing Detection in an Incubator. In Proceedings of the 2019 International Conference on Electromagnetics in Advanced Applications (ICEAA), Granada, Spain, 9–13 September 2019; pp. 1275–1278. [Google Scholar] [CrossRef]
- Baboli, M.; Singh, A.; Soll, B.; Boric-Lubecke, O.; Lubecke, V.M. Wireless Sleep Apnea Detection Using Continuous Wave Quadrature Doppler Radar. IEEE Sens. J. 2020, 20, 538–545. [Google Scholar] [CrossRef]
- Van, N.T.P.; Tang, L.; Singh, A.; Minh, N.D.; Mukhopadhyay, S.C.; Hasan, S.F. Self-Identification Respiratory Disorder Based on Continuous Wave Radar Sensor System. IEEE Access 2019, 7, 40019–40026. [Google Scholar] [CrossRef]
- Xiao, Y.; Li, C.; Lin, J. A Portable Noncontact Heartbeat and Respiration Monitoring System Using 5-GHz Radar. IEEE Sens. J. 2007, 7, 1042–1043. [Google Scholar] [CrossRef]
- Tu, J.; Hwang, T.; Lin, J. Respiration Rate Measurement Under 1-D Body Motion Using Single Continuous-Wave Doppler Radar Vital Sign Detection System. IEEE Trans. Microw. Theory Tech. 2016, 64, 1937–1946. [Google Scholar] [CrossRef]
- Tan, H.; Qiao, D.; Li, Y. Non-contact heart rate tracking using Doppler radar. In Proceedings of the 2012 International Conference on Systems and Informatics (ICSAI2012), Yantai, China, 19–20 May 2012; pp. 1711–1714. [Google Scholar] [CrossRef]
- Tu, J.; Lin, J. Respiration harmonics cancellation for Accurate Heart Rate measurement in non-contact vital sign detection. In Proceedings of the 2013 IEEE MTT-S International Microwave Symposium Digest (MTT), Seattle, WA, USA, 2–7 June 2013; pp. 1–3. [Google Scholar] [CrossRef]
- Li, C.; Xiaogang, Y.; Li, D.; Ran, L.; Lin, J. Software configurable 5.8 GHz radar sensor receiver chip in 0.13 μm CMOS for non-contact vital sign detection. In Proceedings of the 2009 IEEE Radio Frequency Integrated Circuits Symposium, Boston, MA, USA, 7–9 June 2009; pp. 97–100. [Google Scholar] [CrossRef]
- Mercuri, M.; Lorato, I.R.; Liu, Y.H.; Wieringa, F.; Hoof, C.V.; Torfs, T. Vital-sign monitoring and spatial tracking of multiple people using a contactless radar-based sensor. Nat. Electron. 2019, 2, 252–262. [Google Scholar] [CrossRef]
- Fouladi, R.F.; Oncu, A. Vital signs modeling for Doppler radar cardiorespiratory monitoring. In Proceedings of the 2013 36th International Conference on Telecommunications and Signal Processing (TSP), Rome, Italy, 2–4 July 2013; pp. 363–366. [Google Scholar] [CrossRef]
- Chen, K.; Misra, D.; Wang, H.; Chuang, H.; Postow, E. An X-Band Microwave Life-Detection System. IEEE Trans. Biomed. Eng. 1986, BME-33, 697–701. [Google Scholar] [CrossRef] [PubMed]
- Lin, J.C. Microwave sensing of physiological movement and volume change: A review. Bioelectromagnetics 1992, 13, 557–565. [Google Scholar] [CrossRef]
- Chen, K.-M.; Huang, Y.; Zhang, J.; Norman, A. Microwave life-detection systems for searching human subjects under earthquake rubble or behind barrier. IEEE Trans. Biomed. Eng. 2000, 47, 105–114. [Google Scholar] [CrossRef]
- Seals, J.; Crowgey, S.R.; Sharpe, S.M. Electromagnetic Vital Signs Monitor; Technical Report; Georgia Tech Research Institute Biomedical Division: Atlanta, GA, USA, 1986; Final Report Project A-3529-060. [Google Scholar]
- Narayanan, R.M.; Shastry, M.C.; Chen, P.H.; Levi, M. Through -the-Wall Detection of Stationary Human Targets Using Doppler Radar. Prog. Electromagn. Res. B 2010, 20, 147–166. [Google Scholar] [CrossRef] [Green Version]
- Mu, K.; Luan, T.H.; Zhu, L.; Cai, L.X.; Gao, L. A Survey of Handy See-Through Wall Technology. IEEE Access 2020, 8, 82951–82971. [Google Scholar] [CrossRef]
- Li, C.; Xiao, Y.; Lin, J. A 5GHz Double-Sideband Radar Sensor Chip in 0.18 μm CMOS for Non-Contact Vital Sign Detection. IEEE Microw. Wirel. Components Lett. 2008, 18, 494–496. [Google Scholar] [CrossRef]
- Xiao, Y.; Lin, J.; Boric-Lubecke, O.; Lubecke, M. Frequency-tuning technique for remote detection of heartbeat and respiration using low-power double-sideband transmission in the ka-band. IEEE Trans. Microw. Theory Tech. 2006, 54, 2023–2032. [Google Scholar] [CrossRef]
- Park, B.; Boric-Lubecke, O.; Lubecke, V.M. Arctangent Demodulation With DC Offset Compensation in Quadrature Doppler Radar Receiver Systems. IEEE Trans. Microw. Theory Tech. 2007, 55, 1073–1079. [Google Scholar] [CrossRef]
- Droitcour, A.D.; Boric-Lubecke, O.; Lubecke, V.M.; Lin, J.; Kovacs, G.T.A. Range correlation and I/Q performance benefits in single-chip silicon Doppler radars for noncontact cardiopulmonary monitoring. IEEE Trans. Microw. Theory Tech. 2004, 52, 838–848. [Google Scholar] [CrossRef]
- Huang, J.; Tseng, C. A 5.8-GHz radar sensor chip in 0.18-μm CMOS for non-contact vital sign detection. In Proceedings of the 2016 IEEE International Symposium on Radio-Frequency Integration Technology (RFIT), Taipei, Taiwan, 24–26 August 2016; pp. 1–3. [Google Scholar] [CrossRef]
- Li, C.; Yu, X.; Lee, C.; Li, D.; Ran, L.; Lin, J. High-Sensitivity Software-Configurable 5.8-GHz Radar Sensor Receiver Chip in 0.13-μm CMOS for Noncontact Vital Sign Detection. IEEE Trans. Microw. Theory Tech. 2010, 58, 1410–1419. [Google Scholar] [CrossRef]
- Kao, T.J.; Yan, Y.; Shen, T.; Chen, A.Y.; Lin, J. Design and Analysis of a 60-GHz CMOS Doppler Micro-Radar System-in-Package for Vital-Sign and Vibration Detection. IEEE Trans. Microw. Theory Tech. 2013, 61, 1649–1659. [Google Scholar] [CrossRef]
- IEEE Standard for Radar Definitions. IEEE Std 686-2017 (Revision of IEEE Std 686-2008); IEEE: New York, NY, USA, 2017; pp. 1–54. [Google Scholar] [CrossRef]
- Xu, S.; Liu, H.; Gao, F.; Wang, Z. Non-contact Vital Sign Monitoring Using Universal Software Radio Peripheral. In Proceedings of the 2018 2nd IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 25–27 May 2018; pp. 728–731. [Google Scholar] [CrossRef]
- Li, M.; Lin, J. Wavelet-Transform-Based Data-Length-Variation Technique for Fast Heart Rate Detection Using 5.8-GHz CW Doppler Radar. IEEE Trans. Microw. Theory Tech. 2018, 66, 568–576. [Google Scholar] [CrossRef]
- Toker, O.; Ozdemir, O. A SyntheticWide-Bandwidth Radar System Using Software Defined Radios. Eng. Proc. 2020, 2, 9. [Google Scholar] [CrossRef]
- Wibowo, T.P.; Zulkifli, F.Y. Vivaldi Antenna for Concrete Inspection Radar. In Proceedings of the 2019 3rd International Conference on Electrical, Telecommunication and Computer Engineering (ELTICOM), Medan, Indonesia, 16–17 September 2019; pp. 179–181. [Google Scholar] [CrossRef]
- Muin, F.; Apriono, C. Path Loss and Human Body Absorption Experiment for Breath Detection. In Proceedings of the 2020 27th International Conference on Telecommunications (ICT), Bali, Indonesia, 5–7 October 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Proakis, J.G.; Salehi, M. Communication Systems Engineering, 1st ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1994. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Width | 89.52 mm |
| Length | 107.68 mm |
| Tapered slot line | 78.29 mm |
| Probe feed length | 39.10 mm |
| Probe feed width | 3.14 mm |
| Circular balun diameter | 8.02 mm |
| Slot-line radial stub | 6.67 mm |
| Type of USRP | B200mini-i (70 MHz–6 GHz) |
| Carrier frequency | 5.8 GHz |
| Antenna gain | 4 dBi |
| Half-power beamwidth | 105 deg |
| Bandwidth | 1100 Mhz (5.1–6.2 GHz) |
| USRP output power | 0.33 mW |
| Measurement distance | 0.5, 1.0, 1.5, and 2.0 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Apriono, C.; Muin, F.; Juwono, F.H. Portable Micro-Doppler Radar with Quadrature Radar Architecture for Non-Contact Human Breath Detection. Sensors 2021, 21, 5807. https://doi.org/10.3390/s21175807
Apriono C, Muin F, Juwono FH. Portable Micro-Doppler Radar with Quadrature Radar Architecture for Non-Contact Human Breath Detection. Sensors. 2021; 21(17):5807. https://doi.org/10.3390/s21175807
Chicago/Turabian StyleApriono, Catur, Fathul Muin, and Filbert H. Juwono. 2021. "Portable Micro-Doppler Radar with Quadrature Radar Architecture for Non-Contact Human Breath Detection" Sensors 21, no. 17: 5807. https://doi.org/10.3390/s21175807
APA StyleApriono, C., Muin, F., & Juwono, F. H. (2021). Portable Micro-Doppler Radar with Quadrature Radar Architecture for Non-Contact Human Breath Detection. Sensors, 21(17), 5807. https://doi.org/10.3390/s21175807