
Microseismic P-Wave Travel Time Computation and 3D Localization Based on a 3D High-Order Fast Marching Method



Abstract
:1. Introduction
2. P-Wave Travel Time Calculating Method
2.1. Fast Marching Method
2.2. 3D High-Order Fast Marching Method
3. Validation and Analysis of the Travel Time Computation
3.1. Homogeneous Velocity Model
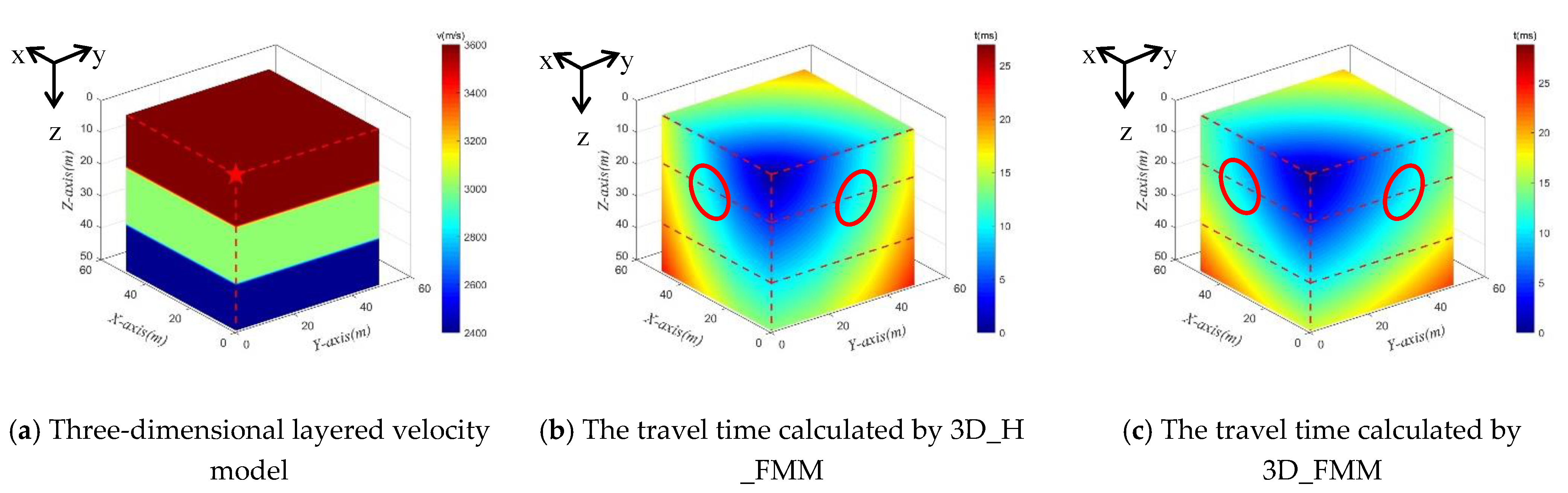
3.2. Inhomogeneous Layered Velocity Model
4. Validation of the 3D Microseismic Source Localization
4.1. Localization Method Based on PSO Algorithms
4.2. Localization Contrast Test and Result Analysis
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tang, Z.L.; Liu, X.L.; Xu, Q.J.; Li, C.Y.; Qin, P.X. Stability evaluation of deep-buried TBM construction tunnel based on microseismic monitoring technology. Tunn. Undergr. Space Technol. 2018, 81, 512–524. [Google Scholar] [CrossRef]
- Ge, M. Efficient mine microseismic monitoring. Int. J. Coal Geol. 2005, 64, 44–56. [Google Scholar] [CrossRef]
- Zhang, C.; Jin, G.H.; Liu, C.; Li, S.; Xue, J.; Cheng, R.H.; Wang, X.L.; Zeng, X.Z. Prediction of rockbursts in a typical island working face of a coal mine through microseismic monitoring technology. Tunn. Undergr. Space Techol. 2021, 113, 103972. [Google Scholar] [CrossRef]
- Xu, N.W.; Li, T.B.; Dai, F.; Zhang, R.; Tang, C.A.; Tang, L.X. Microseismic monitoring of strainburst activities in deep tunnels at the jinping ii hydropower station, china. Rock Mech. Rock Eng. 2016, 49, 981–1000. [Google Scholar] [CrossRef]
- Chen, B.R.; Feng, X.T.; Zeng, X.H.; Xiao, Y.X.; Feng, G. Real-time microseismic monitoring and its characteristic analysis during tbm tunneling in deep-buried tunnel. China J. Rock Mech. Eng. 2011, 30, 275–283. (In Chinese) [Google Scholar]
- Xu, N.W.; Tang, C.A.; Li, L.C.; Zhou, Z.; Yang, J.Y. Microseismic monitoring and stability analysis of the left bank slope in jinping first stage hydropower station in southwestern china. Int. J. Rock Mech. Min. Sci. 2011, 48, 950–963. [Google Scholar] [CrossRef]
- Dai, F.; Li, B.; Xu, N.W.; Meng, G.T.; Wu, J.Y.; Fan, Y.L. Microseismic monitoring of the left bank slope at the baihetan hydropower station, china. Rock Mech. Rock Eng. 2017, 50, 225–232. [Google Scholar] [CrossRef]
- Maxwell, S.C.; Rutledge, J.; Jones, R.; Fehler, M. Petroleum reservoir characterization using downhole microseismic monitoring. Geophysics 2010, 75, 75A129–75A137. [Google Scholar] [CrossRef]
- Huang, W.; Wang, R.; Li, H.; Chen, Y. Unveiling the signals from extremely noisy microseismic data for high-resolution hydraulic fracturing monitoring. Sci. Rep. 2017, 7, 11996. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Z.Z.; Li, Q.G.; Hu, Q.T.; Chen, J.F.; Li, X.L.; Wang, X.G.; Xu, Y.C. Underground microseismic monitoring of a hydraulic fracturing operation for CBM reservoirs in a coal mine. Energy Sci. Eng. 2019, 7, 986–999. [Google Scholar] [CrossRef] [Green Version]
- Daniel, G.; Fortier, E.; Romijn, R. Location Results from Borehole Microseismic Monitoring in the Groningen Gas Reservoir, Netherlands. In Proceedings of the Sixth EAGE Workshop on Passive Seismic, Muscat, Oman, 31 January–3 February 2016. [Google Scholar]
- Wu, S.C.; Chen, Z.J.; Zhang, S.H.; Xu, M.F.; Bai, T.Y. Microseismic location algorithm for gently inclined strata and its numerical verification. Rock. Soil. Mech. 2018, 39, 297–307. (In Chinese) [Google Scholar]
- Hu, Z.; Liu, W.; Xu, X.; Yang, Z.; Wu, D.; Hu, S. Seismic Traveltime Calculation Using Fast Marching Methods with a Rotated Staggered Grid Finite-Difference Scheme. In Proceedings of the 81st EAGE Conference and Exhibition 2019, London, UK, 3–6 June 2019. [Google Scholar]
- Xue, X.; Yang, C.D.; Onishi, T.; King, M.; Datta-Gupta, A. Modeling Hydraulically Fractured Shale Wells Using the Fast-Marching Method with Local Grid Refinements and an Embedded Discrete Fracture Model. SPE J. 2019, 24, 2590–2608. [Google Scholar] [CrossRef]
- White, M.; Fang, H.J.; Nakata, N.; Ben-Zion, Y. PyKonal: A python package for solving the eikonal equation in spherical and cartesian coordinates using the fast marching method. Seismol. Res. Lett. 2020, 91, 2378–2389. [Google Scholar] [CrossRef]
- Guo, L.; Dai, F.; Xu, N.W.; Fan, Y.L.; Li, B. Research on MSFM-based microseismic source location of rock mass with complex velocities. Chin. J. Rock. Mech. Eng. 2017, 36, 394–406. (In Chinese) [Google Scholar]
- Jiang, R.C.; Xu, N.W.; Dai, F.; Zhou, J.W. Research on microseismic location based on fast marching upwind minear interpolation method. Rock. Soil. Mech. 2019, 40, 3697–3708. (In Chinese) [Google Scholar]
- Peng, P.; Wang, L.; Wang, P. Targeted location of microseismic events based on a 3D heterogeneous velocity model in underground mining. PLoS ONE 2019, 14, e0212881. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gao, M.; Pan, J.S.; Li, J.P.; Zhang, Z.P.; Chai, Q.W. 3-D terrains deployment of wireless sensors network by utilizing parallel gases brownian motion optimization. J. Internet Technol. 2021, 22, 13–29. [Google Scholar]
- Chai, Q.W.; Chu, S.C.; Pan, J.S.; Zheng, W.M. Applying Adaptive and Self Assessment Fish Migration Optimization on Localization of Wireless Sensor Network on 3-D Te rrain. J. Inf. Hiding Multim. Signal. Process. 2020, 11, 90–102. [Google Scholar]
- Wang, Y.; Shang, X.; Peng, K. Relocating Mining Microseismic Earthquakes in a 3-D Velocity Model Using a Windowed Cross-Correlation Technique. IEEE Access 2020, 8, 37866–37878. [Google Scholar] [CrossRef]
- Tang, J.Z.; Ehlig-Economides, C.; Fan, B.; Cai, B.; Mao, W.M. A microseismic-based fracture properties characterization and visualization model for the selection of infill wells in shale reservoirs. J. Nat. Gas Sci. Eng. 2019, 67, 147–159. [Google Scholar] [CrossRef]
- Dong, L.J.; Hu, Q.C.; Tong, X.J.; Liu, Y.F. Velocity-Free MS/AE Source Location Method for Three-Dimensional Hole-Containing Structures. Engineering 2020, 6, 827–834. [Google Scholar] [CrossRef]
- Zhang, Z.; Arosio, D.; Hojat, A.; Taruselli, M.; Zanzi, L. Construction of a 3D velocity model for microseismic event location on a monitored rock slope. In Proceedings of the EAGE-GSM 2nd Asia Pacific Meeting on Near Surface Geoscience and Engineering, Kuala Lumpur, Malaysia, 24–25 April 2019. [Google Scholar]
- Peng, P.G.; Jiang, Y.J.; Wang, L.G.; He, Z.X. Microseismic Event Location by Considering the Influence of the Empty Area in an Excavated Tunnel. Sensors 2020, 20, 574. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, Y.; Shang, X.Y.; Peng, K. Locating Mine Microseismic Events in a 3D Velocity Model through the Gaussian Beam Reverse-Time Migration Technique. Sensors 2020, 20, 2676. [Google Scholar] [CrossRef] [PubMed]
- Vidale, J.E. Finite-difference calculation of traveltimes in three dimensions. Geophysics 1990, 55, 521–526. [Google Scholar] [CrossRef] [Green Version]
- Guo, C.; Gao, Y.T.; Wu, S.C.; Cheng, Z.J.; Zhang, S.H.; Han, L.Q. Research of micro-seismic source location method in layered velocity medium based on 3D FSM algorithm and arrival time differences database technique. Rock. Soil. Mech. 2019, 40, 1229–1238. (In Chinese) [Google Scholar]
- Sethian, J.A.; Popovici, M.A. 3-D traveltimes computation using the Fast Marching Method. Geophysic 1999, 64, 516–523. [Google Scholar] [CrossRef]
- Hassouna, M.S.; Farag, A.A. MultiStencils Fast Marching Methods: A Highly Accurate Solution to the Eikonal Equation on Cartesian Domains. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1563–1574. [Google Scholar] [CrossRef]
- Jiang, R.; Dai, F.; Liu, Y.; Li, A. Fast Marching Method for Microseismic Source Location in Cavern-Containing Rockmass: Performance Analysis and Engineering Application. Engineering 2021, 7, 1023–1034. [Google Scholar]
- Kumbhakar, C.; Joshi, A.; Kumari, P. Fast marching method to study traveltime responses of three dimensional numerical models of subsurface. In Proceedings of the Third International Conference on Soft Computing for Problem Solving, Assam, India, 26–28 December 2014; pp. 411–421. [Google Scholar]
- Lou, M. Efficient and accurate traveltime computation in 3D TTI media by the fast marching method. In Proceedings of the Society of Exploration Geophysicists International Exposition and 76th Annual Meeting 2006, SEG 2006, New Orleans, Louisiana, 1–6 October 2006. [Google Scholar]
- Rawlinson, N.; Sambridge, M. Multiple reflection and transmission phases in complex layered media using a multistage fast marching method. Geophysics 2004, 69, 1338–1350. [Google Scholar] [CrossRef]
- Yusefzadeh, R.; Sharifi, M.; Rafiei, Y. New Efficient Method for Injection Well Location Optimization using Fast Marching Method. J. Petrol. Sci. Eng. 2021, 204, 108620. [Google Scholar] [CrossRef]
- Ho, M.S.; Ri, J.H.; Kim, S.B. Improved Characteristic Fast Marching Method for the Generalized Eikonal Equation in a Moving Medium. J. Sci. Comput. 2019, 81, 2484–2502. [Google Scholar] [CrossRef]
- Benaichouche, A.; Noble, M.; Gesret, A. First Arrival Traveltime Tomography Using the Fast Marching Method and the Adjoint State Technique. In Proceedings of the 77th EAGE Conference and Exhibition 2015, Madrid, Spain, 1–4 June 2015; European Association of Geoscientists and Engineers (EAGE): Amsterdam, The Netherlands, 2015. [Google Scholar]
- Li, S.W.; Alexander, V.; Fomel, S. First-break traveltime tomography with the double-square-root eikonal equation. Geophysics 2013, 78, U89–U101. [Google Scholar] [CrossRef] [Green Version]
- Feng, G.L.; Feng, X.T.; Chen, B.R.; Xiao, Y.X. A highly accurate method of locating microseismic events associated with rockburst development processes in tunnels. IEEE Access 2017, 5, 27722–27731. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case A and Case C | Case B and Case D | ||||
|---|---|---|---|---|---|
| Model Scale | Sensor Coordinates (m) | Model Scale | Sensor Coordinates (m) | ||
| 50 m × 50 m × 50 m | R1 | (1, 1, 50) | 1000 m × 1000 m × 1000 m | R1 | (10, 10, 1000) |
| R2 | (1, 50, 50) | R2 | (10, 1000, 1000) | ||
| R3 | (50, 1, 50) | R3 | (1000, 10, 1000) | ||
| R4 | (50, 50, 50) | R4 | (1000, 1000, 1000) | ||
| R5 | (10, 20, 50) | R5 | (100, 200, 1000) | ||
| R6 | (10, 40, 50) | R6 | (100, 400, 1000) | ||
| R7 | (30, 20, 50) | R7 | (300, 200, 1000) | ||
| R8 | (30, 40, 50) | R8 | (300, 400, 1000) | ||
| Symbol | Definition |
|---|---|
| The range of P-wave velocity values | |
| The source point in microseismic monitoring, abbreviated as S | |
| The receiver points, which are sensors’ coordinates in microseismic monitoring, referred to as R, contains R1–R8 | |
| The analytical solution at the node , which is theoretical value of P-wave travel time | |
| The numerical solution at the node , which is calculated by 3D_H_FMM and 3D_FMM | |
| Maximum value of P-wave travel time | |
| The absolute error at the node between the analytical and numerical solution | |
| Degree of accuracy of P-wave travel time | |
| max.err. | Maximum value of absolute error |
| MAE | Mean absolute error |
| MAE red. per. | , the percentage reduction in MAE when traveling with the developed method 3D_H_FMM, compared with 3D_FMM |
| Mean loc. err. | Mean error in microseismic source localization |
| Medi. loc. err. | Median error in microseismic source localization |
| Receiving Points (m) | Theoretical (ms) | 3D_FMM Cal. (ms) | 3D_FMM Abs. Err. (ms) | 3D_H_FMM Cal. (ms) | 3D_H_FMM Abs. Err. (ms) |
|---|---|---|---|---|---|
| R1 (1, 1, 50) | 14.848 | 14.848 | 0 | 14.848 | 0 |
| R2 (50, 1, 50) | 20.999 | 21.395 | 0.396 | 21.066 | 0.067 |
| R3 (50, 1, 50) | 20.999 | 21.395 | 0.396 | 21.066 | 0.067 |
| R4 (50, 50, 50) | 25.718 | 26.403 | 0.685 | 25.773 | 0.055 |
| R5 (10, 20, 50) | 16.158 | 16.490 | 0.332 | 16.223 | 0.065 |
| R6 (10, 40, 50) | 19.173 | 19.629 | 0.456 | 19.240 | 0.067 |
| R7 (30, 20, 50) | 18.189 | 18.699 | 0.510 | 18.247 | 0.058 |
| R8 (30, 40, 50) | 20.914 | 21.525 | 0.611 | 20.975 | 0.061 |
| MAE (ms) | – | – | 0.423 | – | 0.055 |
| Multiple Nodes | 3D_FMM Abs. Err. (ms) | 3D_H_FMM Abs. Err. (ms) | MAE Red. Per. (%) |
|---|---|---|---|
| Source point profile | 0.220 | 0.059 | 73.377 |
| Main diagonal | 0.304 | 0.071 | 76.572 |
| Entire velocity model | 0.422 | 0.049 | 88.335 |
| Receiving Points (m) | Theoretical (ms) | 3D_FMM Cal. (ms) | 3D_FMM Abs. Err. (ms) | 3D_H_FMM Cal. (ms) | 3D_H_FMM Abs. Err. (ms) |
|---|---|---|---|---|---|
| R1 (10, 10, 1000) | 300 | 300 | 0 | 300 | 0 |
| R2 (1000, 10, 1000) | 424.264 | 424.925 | 0.661 | 424.925 | 0.661 |
| R3 (1000, 10, 1000) | 424.264 | 428.936 | 4.672 | 424.925 | 0.661 |
| R4 (1000, 1000, 1000) | 519.615 | 527.627 | 8.012 | 520.155 | 0.540 |
| R5 (100, 200, 1000) | 306.690 | 308.587 | 1.897 | 307.161 | 0.471 |
| R6 (100, 400, 1000) | 323.590 | 326.906 | 3.316 | 324.244 | 0.653 |
| R7 (300, 200, 1000) | 317.864 | 321.211 | 3.346 | 318.318 | 0.454 |
| R8 (300, 400, 1000) | 334.200 | 338.832 | 4.632 | 334.833 | 0.633 |
| MAE (ms) | – | – | 4.423 | – | 0.679 |
| Multiple Nodes | 3D_FMM Abs. Err. (ms) | 3D_H_FMM Abs. Err. (ms) | MAE Red. Per. (%) |
|---|---|---|---|
| Source point profile | 2.654 | 0.578 | 78.203 |
| Main diagonal | 3.703 | 0.689 | 81.402 |
| Entire velocity model | 5.026 | 0.473 | 90.593 |
| Number | Actual Point S (m) | Velocity Model (m/s) | 3D_H_FMM Loca. Results (m) | 3D_H_FMM Abs. Err. (m) | 3D_FMM Loca. Results (m) | 3D_H_FMM Abs. Err. (m) | 3D_H_FMM Loca. Results with Time Noise (m) | 3D_H_FMM Abs. Err. with Time Noise (m) |
|---|---|---|---|---|---|---|---|---|
| 1 | (1, 1, 1) | (2100, 3100, 3600) | (1.893, 2.029, 1.608) | 1.492 | (3.479, 3.210, 1.107) | 3.323 | (1.935, 2.746, 2.512) | 2.455 |
| 2 | (50, 50, 1) | (2300, 2700, 3800) | (48.532, 49.084, 2.169) | 2.088 | (47.431, 48.620, 3.488) | 3.833 | (48.241, 48.286, 2.579) | 2.919 |
| 3 | (25, 25, 16) | (2500, 3100, 3900) | (24.394, 25.883, 14.786) | 1.619 | (23.035, 23.264, 14.576) | 2.984 | (22.145, 23.896, 14.643) | 3.348 |
| 4 | (25, 25, 35) | (2000, 3300, 4000) | (23.691, 24.158, 33.636) | 2.070 | (27.841, 23.539, 32.753) | 3.906 | (28.127, 23.925, 35.414) | 3.332 |
| 5 | (18, 24, 12) | (2600, 3000, 3400) | (16.397, 25.291, 10.551) | 2.517 | (16.107, 22.764, 9.959) | 3.046 | (15.815, 25.350, 12.739) | 2.673 |
| 6 | (42, 8, 20) | (2400, 2800, 3600) | (40.560, 7.631, 19.348) | 1.623 | (40.556, 10.390, 17.738) | 3.594 | (42.418, 9.651, 18.257) | 2.552 |
| Mean loc. err. (m) | – | – | – | 1.901 | – | 3.447 | – | 2.880 |
| Medi. loc. err. (m) | – | – | – | 1.847 | – | 3.459 | – | 2.796 |
| Number | Actual Point S (m) | Velocity Model (m/s) | 3D_H_FMM Loca. Results (m) | 3D_H_FMM Abs. Err. (m) | 3D_FMM Loca. Results (m) | 3D_H_FMM Abs. Err. (m) | 3D_H_FMM Loca. Results with Time Noise (m) | 3D_H_FMM Abs. Err. with Time Noise (m) |
|---|---|---|---|---|---|---|---|---|
| 1 | (500, 500, 350) | (2500, 3200, 3600) | (477.127, 470.127, 379.872) | 48.041 | (453.344, 541.405, 317.331) | 70.416 | (456.977, 469.634, 378.505) | 59.880 |
| 2 | (600, 400, 320) | (2100, 2400, 3800) | (564.570, 430.354, 296.373) | 52.296 | (644.396, 364.939, 321.473) | 56.590 | (579.493, 426.349, 290.993) | 44.229 |
| 3 | (10, 20, 330) | (2800, 3000, 3900) | (28.565, 46.882, 307.532) | 39.650 | (50.342, 54.385, 307.187) | 57.708 | (41.486, 26.192, 300.854) | 43.350 |
| 4 | (50, 800, 700) | (2000, 3500, 4000) | (75.643, 782.911, 686.016) | 33.840 | (81.652, 772.851, 677.864) | 47.212 | (47.859, 763.772, 677.478) | 42.712 |
| 5 | (500, 300, 200) | (2600, 3000, 3400) | (482.247, 280.575, 168.159) | 41.308 | (460.710, 259.671, 234.494) | 66.030 | (475.462, 275.235, 168.293) | 47.125 |
| 6 | (400, 80, 100) | (2300, 2700, 3500) | (382.262, 107.249, 125.709) | 41.450 | (356.784, 97.921, 158.102) | 74.597 | (357.357, 118.416, 105.388) | 57.647 |
| Aver. err. (m) | – | – | – | 42.764 | – | 62.092 | – | 49.157 |
| Medi. err. (m) | – | – | – | 41.379 | – | 61.869 | – | 45.677 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Wang, J.; Wang, Z.; Sui, Q.; Xiong, Z. Microseismic P-Wave Travel Time Computation and 3D Localization Based on a 3D High-Order Fast Marching Method. Sensors 2021, 21, 5815. https://doi.org/10.3390/s21175815
Li Y, Wang J, Wang Z, Sui Q, Xiong Z. Microseismic P-Wave Travel Time Computation and 3D Localization Based on a 3D High-Order Fast Marching Method. Sensors. 2021; 21(17):5815. https://doi.org/10.3390/s21175815
Chicago/Turabian StyleLi, Yijia, Jing Wang, Zhengfang Wang, Qingmei Sui, and Ziming Xiong. 2021. "Microseismic P-Wave Travel Time Computation and 3D Localization Based on a 3D High-Order Fast Marching Method" Sensors 21, no. 17: 5815. https://doi.org/10.3390/s21175815
APA StyleLi, Y., Wang, J., Wang, Z., Sui, Q., & Xiong, Z. (2021). Microseismic P-Wave Travel Time Computation and 3D Localization Based on a 3D High-Order Fast Marching Method. Sensors, 21(17), 5815. https://doi.org/10.3390/s21175815