
A Rapid Beam Pointing Determination and Beam-Pointing Error Analysis Method for a Geostationary Orbiting Microwave Radiometer Antenna in Consideration of Antenna Thermal Distortions


Abstract
:1. Introduction
- (1)
- The method of matrix optics (MO), which is widely used in characterizing the optical path of the visible/infrared sensor, is adapted for modeling the equivalent optical path of the microwave antenna with a much more complicated configuration.
- (2)
- The ideal ABP determination model and the model for determining the actual ABP affected by thermal distortions of the antenna reflectors are deduced for the examined GEO microwave antenna. Compared with the PO approximation, the primary advantage of the extended MO method is that both the ideal and actual ABPs can be rapidly and accurately computed with simple matrix operations, thus effectively reducing the computational burden of the onboard computer.
- (3)
- Based on the ideal and actual ABP determination models, the MO-based method for calculating the thermally induced BPE is given. The significance of the MO-based BPE computing method lies in its capability to establish a direct connection between reflector thermal distortions and the resulting BPE. Through numerical experiments, the impacts of different reflector thermal distortions on the BPE are quantified on a case-by-case basis, and those thermal distortions that have a significant impact on the BPE are identified.
2. Instrument Overview
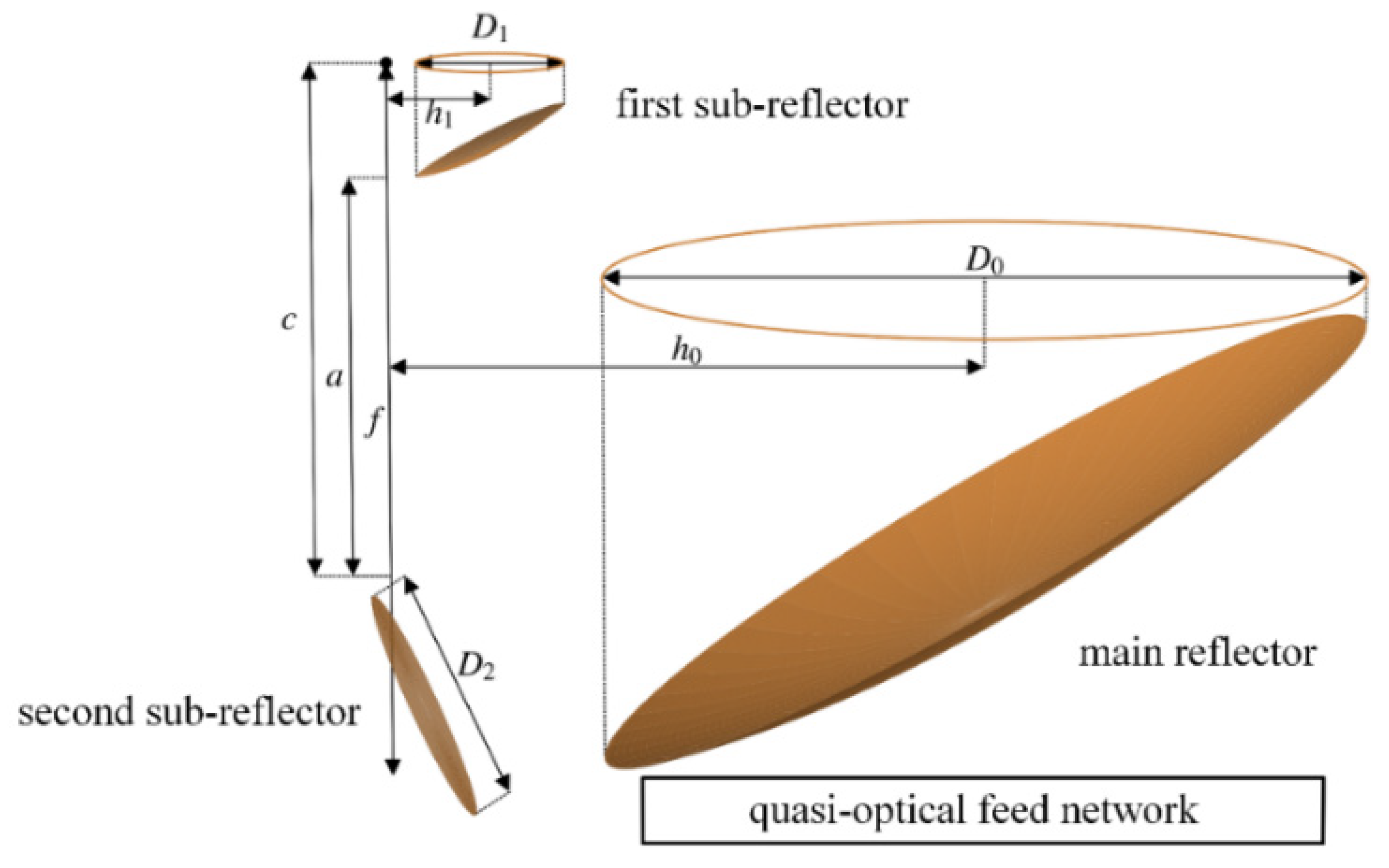
2.1. Geometric Structure of the Microwave Antenna
2.2. Operational Principle of the Microwave Antenna
3. ABP Determination Models and BPE Computing Method
3.1. Definition of Basic Coordinate Systems
- (1)
- ECF coordinate system -
- (2)
- FRA coordinate system -
- (3)
- SSR coordinate system -
- (4)
- FSR coordinate system -
- (5)
- MR coordinate system -
3.2. Ideal ABP Determination Model
3.3. Definition of the Thermal Distortion Errors of the Reflector
3.4. Actual ABP Determination Model
3.5. Calculation Method for the Thermally Induced BPE
4. Simulation Experiments and Discussion
4.1. Experimental Design
4.2. Experimental Data
- (1)
- For the MR, the aperture was , the focal length was , and the offset height was .
- (2)
- For the FSR, the aperture was , the inter-focal distance was , the major axis length was , and the offset height was .
- (3)
- For the SSR, the aperture was .
- (4)
- The output of the ECF was set to a standard Gaussian beam, the taper angle was , the taper was , and the initial scan azimuth was .
4.3. Experiment 1: Validation of the MO-Based ABP Determination Model
4.4. Experiment 2: Analysis of the Reflector TDE Impacts on ABP Accuracy
4.4.1. Analysis for Thermal Misalignment Errors
- (1)
- It can be seen from Figure 6b that once was specified, the impact of on the BPE increased approximately linearly with the increase in .
- (2)
- A careful look at Figure 6a shows that, for a specified level of , the resulting BPE curve showed a significant sinusoidal wave pattern over a scan period of the ECF, with the minimum appearing near and the maximum near . Furthermore, it could be found that the sinusoidal trend in the BPE curve became much more evident as increased. The reason for this phenomenon was that the rate at which the BPE increased changed with (manifested as a dispersion of the BPE growth rates at different values of in Figure 6b). As varied from to , the dispersion of the BPE growth rates at different values was widened; thus, the fluctuation of the BPE curve became quite pronounced.
- (3)
- Quantitatively speaking, the fluctuation range (i.e., the difference between the maximum BPE and the minimum BPE) of the BPEs was only with ; however, when , the fluctuation range of the BPEs could reach .
- (1)
- According to Figure 7a, the BPE caused by the roll misalignment angle of the MR was primarily related to itself and did not change with the scan azimuth of the ECF.
- (2)
- From Figure 7b, once was specified, the -induced BPE increased approximately linearly with the increase in .
- (3)
- (4)
- Quantitatively speaking, the fluctuation range of the BPEs was only with , and when , the fluctuation range of the BPEs was still only .
- (1)
- Among the thermal misalignment errors, , , and had no impact on the thermally induced BPE. For the remaining thermal misalignment errors, and had the highest impacts on the BPE, followed by and , while and had the lowest impacts. Specifically, the impacts of and were by one order of magnitude substantially higher than those of , , , and at the same level.
- (2)
- Once the scan azimuth of the ECF (i.e., ) was specified, there was an approximately positive linear relationship between the thermal misalignment error and the resulting BPE (i.e., as the thermal misalignment error increased, the resulting BPE tended to increase as well). On the other hand, once the thermal misalignment error level was specified, most thermal misalignment errors (except for ) led to sinusoidal BPEs over a scan period of the ECF. The fluctuation range of the BPEs was generally in the magnitude of with a small thermal misalignment error; however, as the thermal misalignment error increased, the fluctuation of the BPEs would gradually become pronounced, and the fluctuation range could reach the magnitude of .
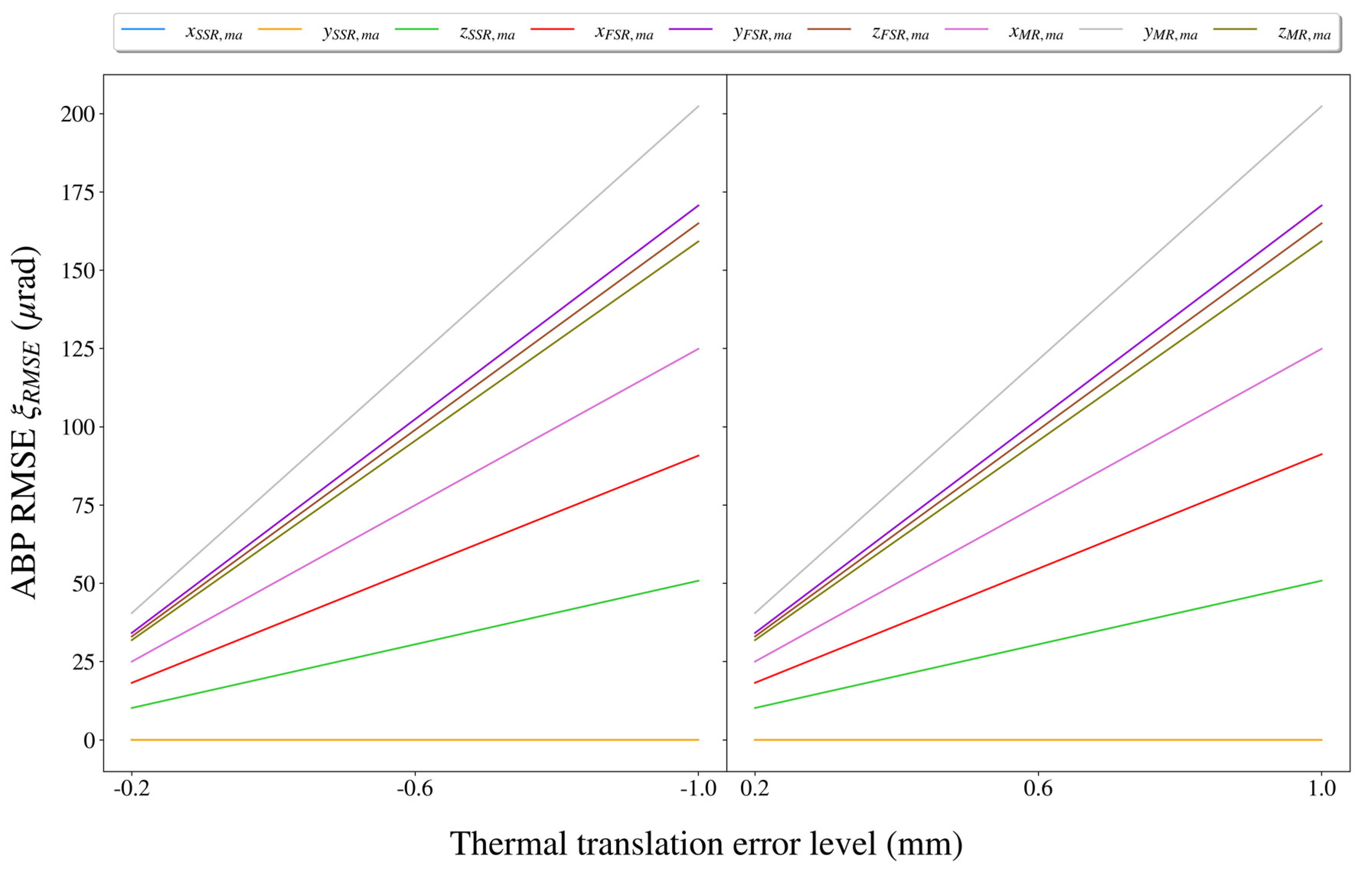
4.4.2. Analysis for Thermal Translation Errors
- (1)
- According to Figure 9, the BPE caused by the pitch axial translation of the MR was mainly related to itself and showed very little change with the scan azimuth of the ECF.
- (2)
- From Figure 9b, once was specified, the -induced BPE increased approximately linearly with the increase in .
- (3)
- (3)
- Quantitatively speaking, the fluctuation range of the BPEs was only with , and when , the fluctuation range of the BPEs was still only .
- (1)
- Among the thermal translation errors, and had no impact on the thermally induced BPE. For the remaining thermal translation errors, their impacts on the BPE had the same order of magnitude. Among them, had the highest impact on the BPE; , , and also had relatively higher impacts; and had relatively lower impacts; and had the lowest impact. Specifically, the impact of was about four times larger than that of .
- (2)
- Once the scan azimuth of the ECF (i.e., ) was specified, there was an approximately positive linear relationship between the thermal translation error and the resulting BPE. On the other hand, once the thermal translation error level was specified, most thermal translation errors (except for , , and ) led to sinusoidal BPEs over a scan period of the ECF. The fluctuation range of the BPEs was generally with a small thermal translation error; however, as the thermal translation error increased, the fluctuation of the BPEs would gradually become pronounced, and the fluctuation range could reach a maximum of .
5. Conclusions
- (1)
- The misalignment angles of the yaw axis (focal axis) of the MR and FSR had no impact on the thermally induced BPE, and the misalignment angle of the yaw axis (surface normal) and the roll and pitch axial translation of the SSR (i.e., the planar folding mirror) also had no impact on the BPE.
- (2)
- For thermal misalignment errors, the roll and pitch misalignment angles of the MR had the greatest impacts on the BPE, followed by the thermal misalignment errors of the FSR, and the thermal misalignment errors of the SSR had the lowest impact. The impacts of MR’s thermal misalignment errors were by one order of magnitude substantially higher than those of the thermal misalignment errors of the FSR and SSR.
- (3)
- For the thermal translation errors, their impacts on the BPE had the same order of magnitude. Among them, the pitch axial translation of the MR had the highest impact on the BPE, while the yaw axial translation of the SSR had the lowest impact. The impact of the former was about four times greater than that of the latter. Therefore, to ensure the ABP accuracy required by the GEO microwave radiometer, stringent measures must be adopted to minimize the thermal distortions of the MR.
- (4)
- For any TDE examined in this study, once the scan azimuth of the ECF was specified, there was an approximately positive linear relationship between this TDE and the resulting BPE. On the other hand, once the TDE level was specified, most TDEs led to sinusoidal BPEs over a scan period of the ECF. The greater the TDE was, the more significant the sinusoidal trend in the resulting BPEs. When 13 TDEs existed simultaneously, the maximum fluctuation range of the BPEs was during scanning of the Earth (i.e., the scan azimuth of the ECF ranged from to ). This means that it is still feasible to use satellite attitude maneuvering to compensate for the thermally induced BPEs within the current NWP operational requirements.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Schwalb, A. The TIROS-N/NOAA A-G Satellite Series; NOAA Technical Memorandum NESS 95; NOAA/NESS: Washington, DC, USA, 1978; p. 75.
- Gao, S.; Li, Z.; Chen, Q.; Zhou, W.; Lin, M.; Yin, X. Inter-Sensor Calibration between HY-2B and AMSR2 Passive Microwave Data in Land Surface and First Result for Snow Water Equivalent Retrieval. Sensors 2019, 19, 5023. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Karthikeyan, L.; Pan, M.; Nagesh Kumar, D.; Wood, E.F. Effect of Structural Uncertainty in Passive Microwave Soil Moisture Retrieval Algorithm. Sensors 2020, 20, 1225. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gluba, Ł.; Łukowski, M.; Szlązak, R.; Sagan, J.; Szewczak, K.; Łoś, H.; Rafalska-Przysucha, A.; Usowicz, B. Spatio-Temporal Mapping of L-Band Microwave Emission on a Heterogeneous Area with ELBARA III Passive Radiometer. Sensors 2019, 19, 3447. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lambrigtsen, B.; Wilson, W.; Tanner, A.; Gaier, T.; Ruf, C.; Piepmeier, J. GeoSTAR—A microwave sounder for geostationary satellites. In Proceedings of the 2004 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Anchorage, AK, USA, 20–24 September 2004; Volume 2, pp. 777–780. [Google Scholar]
- Tanner, A.B.; Wilson, W.J.; Lambrigsten, B.H.; Dinardo, S.J.; Brown, S.T.; Kangaslahti, P.P.; Gaier, T.C.; Ruf, C.S.; Gross, S.M.; Lim, B.H.; et al. Initial Results of the Geostationary Synthetic Thinned Array Radiometer (GeoSTAR) Demonstrator Instrument. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1947–1957. [Google Scholar] [CrossRef]
- Christensen, J.; Carlstrom, A.; Ekstrom, H.; Emrich, A.; Embretsén, J.; de Maagt, P.; Colliander, A. GAS: The Geostationary Atmospheric Sounder. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Barcelona, Spain, 23–28 July 2007; pp. 223–226. [Google Scholar]
- Wu, J.; Zhang, C.; Liu, H.; Sun, W.; Yan, J. Clock scan of imaging interferometric radiometer and its applications. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Barcelona, Spain, 23–28 July 2007; pp. 5244–5246. [Google Scholar]
- Liu, H.; Wu, J.; Zhang, S.; Yan, J.; Zhang, C.; Sun, W.; Niu, L. Conceptual design and breadboarding activities of geostationary interferometric microwave sounder (GIMS). In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Cape Town, South Africa, 12–17 July 2009; pp. 1039–1042. [Google Scholar]
- Liu, H.; Wu, J.; Zhang, S.; Yan, J.; Niu, L.; Zhang, C.; Sun, W.; Li, H.; Li, B. The geostationary interferometric microwave sounder (GIMS): Instrument overview and recent progress. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Vancouver, BC, Canada, 24–29 July 2011; pp. 3629–3632. [Google Scholar]
- Liu, H.; Niu, L.; Zhang, C.; Han, D.; Lu, H.; Zhao, X.; Wu, J. Preliminary results of GIMS-II (Geostationary interferometric microwave sounder-second generation) demonstrator. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 711–714. [Google Scholar]
- Guo, X.; Liu, H.; Niu, L.; Zhang, C.; Lu, H.; Huo, C.; Wang, T.; Wu, J. Data processing and experimental performance of GIMS-II (Geostationary Interferometric Microwave Sounder-Second Generation) demonstrator. In Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Cambridge, MA, USA, 27–30 March 2018; pp. 1–4. [Google Scholar]
- Zhang, C.; Liu, H.; Niu, L.; Wu, J. CSMIR: An L-band clock scan microwave interferometric radiometer. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1874–1882. [Google Scholar] [CrossRef]
- Gasiewski, A.J.; Voronovich, A.; Weber, B.L.; Stankov, B.; Klein, M.; Hill, R.J.; Bao, J.W. Geosynchronous Microwave (GEM) sounder/imager observation system simulation. In Proceedings of the 2003 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Toulouse, France, 21–25 July 2003; pp. 1209–1211. [Google Scholar]
- Pinori, S.; Baordo, F.; Medaglia, C.M.; Mugnai, A.; Bizzarri, B. On the potential of sub-mm passive MW observations from geostationary satellites to retrieve heavy precipitation over the Mediterranean Area. Adv. Geosci. 2006, 7, 387–394. [Google Scholar] [CrossRef] [Green Version]
- Bizzarri, B.; Gasiewski, A.; Staelin, D.H. Initiatives for millimeter/submillimeter-wave sounding from geostationary orbit. In Proceedings of the 2002 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Toronto, ON, Canada, 24–28 June 2002; pp. 548–552. [Google Scholar]
- Bizzarri, B.; Mugnai, A. Requirements and perspectives for MW/sub-mm sounding from geostationary satellite. In Proceedings of the 2002 EUMETSAT Meteorological Satellite Conference, Dublin, Ireland, 2–6 September 2002; pp. 97–105. [Google Scholar]
- Xie, Z.; Li, X.; Yao, C.; Jiang, L.; Li, X. Research on geostationary orbit microwave radiometer technology. Aerosp. Shanghai 2018, 35, 20–28. [Google Scholar] [CrossRef]
- NOAA; NESDIS; NASA. GOES-R Product Definition and Users’ Guide. Available online: https://www.goesr.gov/resources/docs.html (accessed on 10 April 2021).
- Wang, J.; Liu, C.; Yang, L.; Shang, J.; Zhang, Z. Calculation of geostationary satellites’ nominal fixed grid and its application in FY-4A advanced geosynchronous radiation imager. Acta Opt. Sin. 2018, 38, 135–143. [Google Scholar]
- Wang, Y.; Kang, A.; Cao, Y.; Jiang, L.; Jiang, S. Research of real-aperture microwave antenna main reflector thermal control measures on geostationary Earth orbit. Aerosp. Shanghai 2016, 33, 107–113. [Google Scholar] [CrossRef]
- Carr, J.L. Twenty-five years of INR. J. Astronaut. Sci. 2009, 57, 505–515. [Google Scholar] [CrossRef]
- Wang, C.; Liu, X.; Wang, W. Analysis method of temperature distribution characteristic and thermal distortion of large reflector antennas. J. Astronaut. 2013, 34, 1523–1528. [Google Scholar]
- Guo, W.; Li, Y.; Li, Y.Z.; Tian, S.; Wang, S. Thermal–structural analysis of large deployable space antenna under extreme heat loads. J. Therm. Stresses 2016, 39, 887–905. [Google Scholar] [CrossRef]
- Wang, C.S.; Xiao, L.; Wang, W.; Xu, Q.; Xiang, B.B.; Zhong, J.F.; Jiang, L.; Bao, H.; Wang, N. An adjustment method for active reflector of large high-frequency antennas considering gain and boresight. Res. Astron. Astrophys. 2017, 17, 043. [Google Scholar] [CrossRef]
- Li, P.; Duan, B.; Wang, W.; Zheng, F. Electromechanical coupling analysis of ground reflector antennas under solar radiation. IEEE Antennas Propag. Mag. 2012, 54, 40–57. [Google Scholar] [CrossRef]
- Li, X.; Xie, Z. Tolerance analysis of sub-millimeter wave radiometer antenna based on parametric control method. J. Terahertz Sci. Electron. Inf. Technol. 2016, 14, 508–512. [Google Scholar]
- Li, Z.; Zhang, Y.; Liu, K.; Liu, D.; Miao, J. A millimeter and sub-millimeter wave multi-channel quasi-optical system for microwave radiometer. In Proceedings of the 2014 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Quebec City, QC, Canada, 13–18 July 2014; pp. 3033–3036. [Google Scholar]
- Hu, H.; Shang, J.; Yang, L.; Li, H.; Liu, C.; Lai, G.; Wang, J.; Tong, X.; Zhang, Z. Scan planning optimization for 2-D beam scanning using a future geostationary microwave radiometer. IEEE Trans. Aerosp. Electron. Syst. 2021. [Google Scholar] [CrossRef]
- Tong, X.; Wang, J.; Lai, G.; Shang, J.; Qiu, C.; Liu, C.; Ding, L.; Li, H.; Zhou, S.; Yang, L. Normalized projection models for geostationary remote sensing satellite: A comprehensive comparative analysis (January 2019). IEEE Trans. Geosci. Remote Sens. 2019, 57, 9643–9658. [Google Scholar] [CrossRef]
- TICAR. GRASP User’s Manual; Version 10.3.0; TICRA: Copenhagen, Denmark, 2014. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Statistical Category | Statistical Value |
|---|---|
| Maximum error () | |
| Mean error () | |
| RMSE () |
| Thermal Misalignment Error | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| RMSE of ABPs ( | 81.8 | 133.2 | 0.0 | 180.1 | 179.2 | 0.0 | 1808.7 | 1499.5 | 0.0 |
| Thermal Translation Error | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| RMSE of ABPs ( | 0.0 | 0.0 | 50.8 | 91.2 | 170.6 | 164.9 | 124.9 | 202.3 | 159.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, H.; Tong, X.; Li, H. A Rapid Beam Pointing Determination and Beam-Pointing Error Analysis Method for a Geostationary Orbiting Microwave Radiometer Antenna in Consideration of Antenna Thermal Distortions. Sensors 2021, 21, 5943. https://doi.org/10.3390/s21175943
Hu H, Tong X, Li H. A Rapid Beam Pointing Determination and Beam-Pointing Error Analysis Method for a Geostationary Orbiting Microwave Radiometer Antenna in Consideration of Antenna Thermal Distortions. Sensors. 2021; 21(17):5943. https://doi.org/10.3390/s21175943
Chicago/Turabian StyleHu, Hualong, Xiaochong Tong, and He Li. 2021. "A Rapid Beam Pointing Determination and Beam-Pointing Error Analysis Method for a Geostationary Orbiting Microwave Radiometer Antenna in Consideration of Antenna Thermal Distortions" Sensors 21, no. 17: 5943. https://doi.org/10.3390/s21175943