
Small-Angle Particle Counting Coupled Photometry for Real-Time Detection of Respirable Particle Size Segmentation Mass Concentration

Abstract
:1. Introduction
2. Detection Theory
2.1. Photometry Method
2.2. Optical Particle Counting Method
2.2.1. Forward Small Angle Detection
2.2.2. Inversion of Particle Mass Concentration by Single Particle Pulse
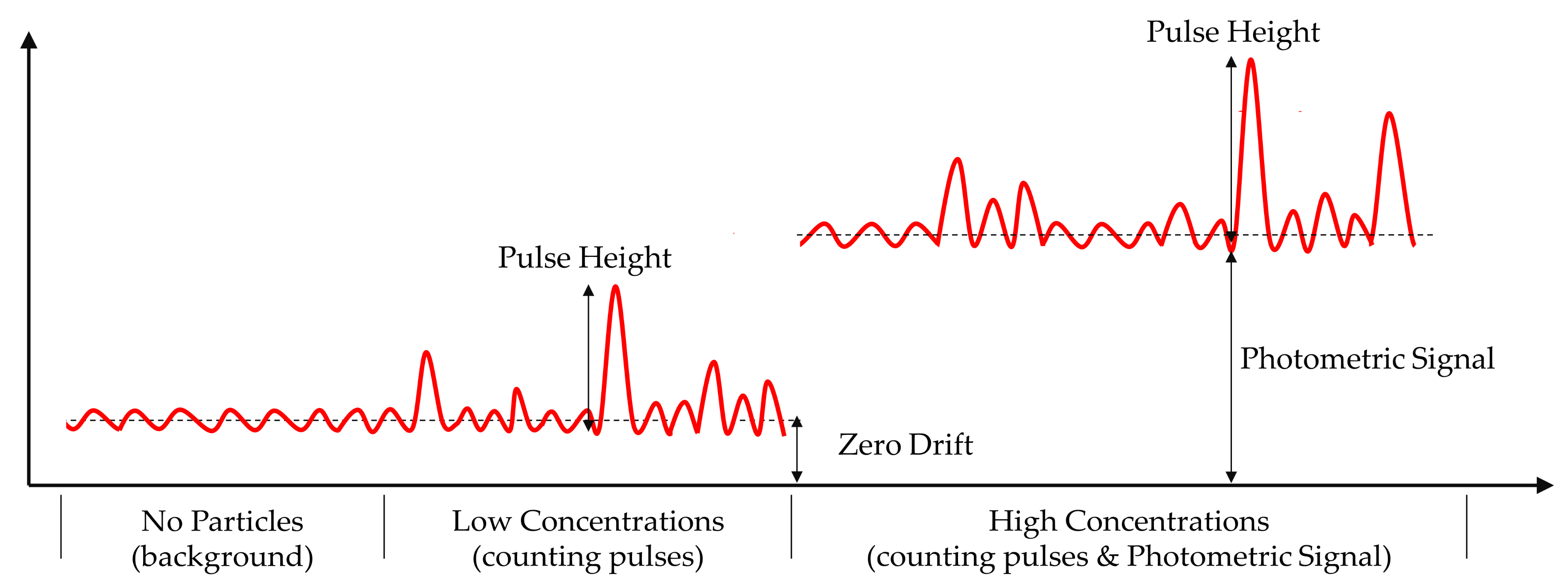
2.2.3. Small Angle Particle Counting Coupled with Photometry
3. Instrument Design
3.1. Instrument Description
3.2. Suppression of Stray Light Background Noise
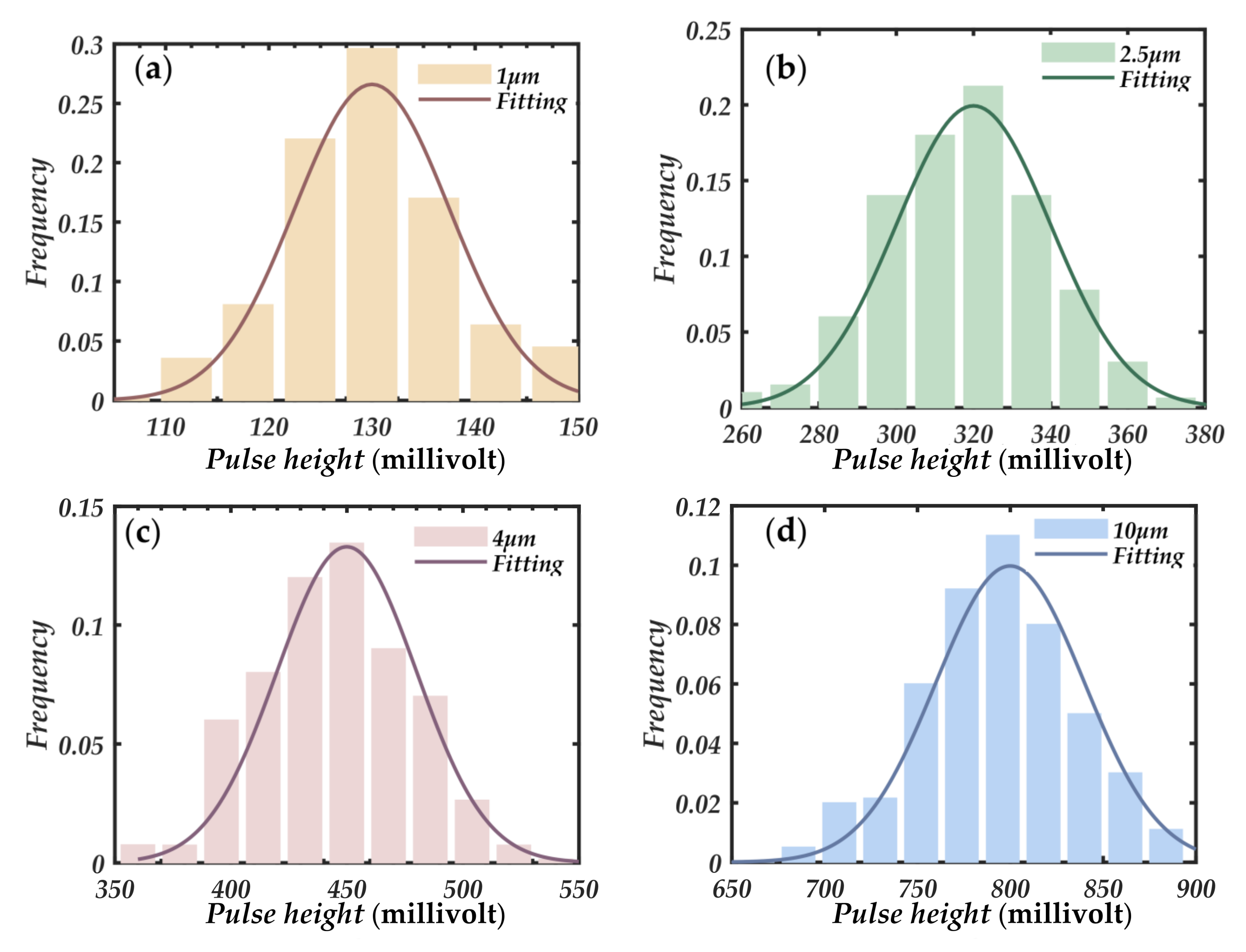
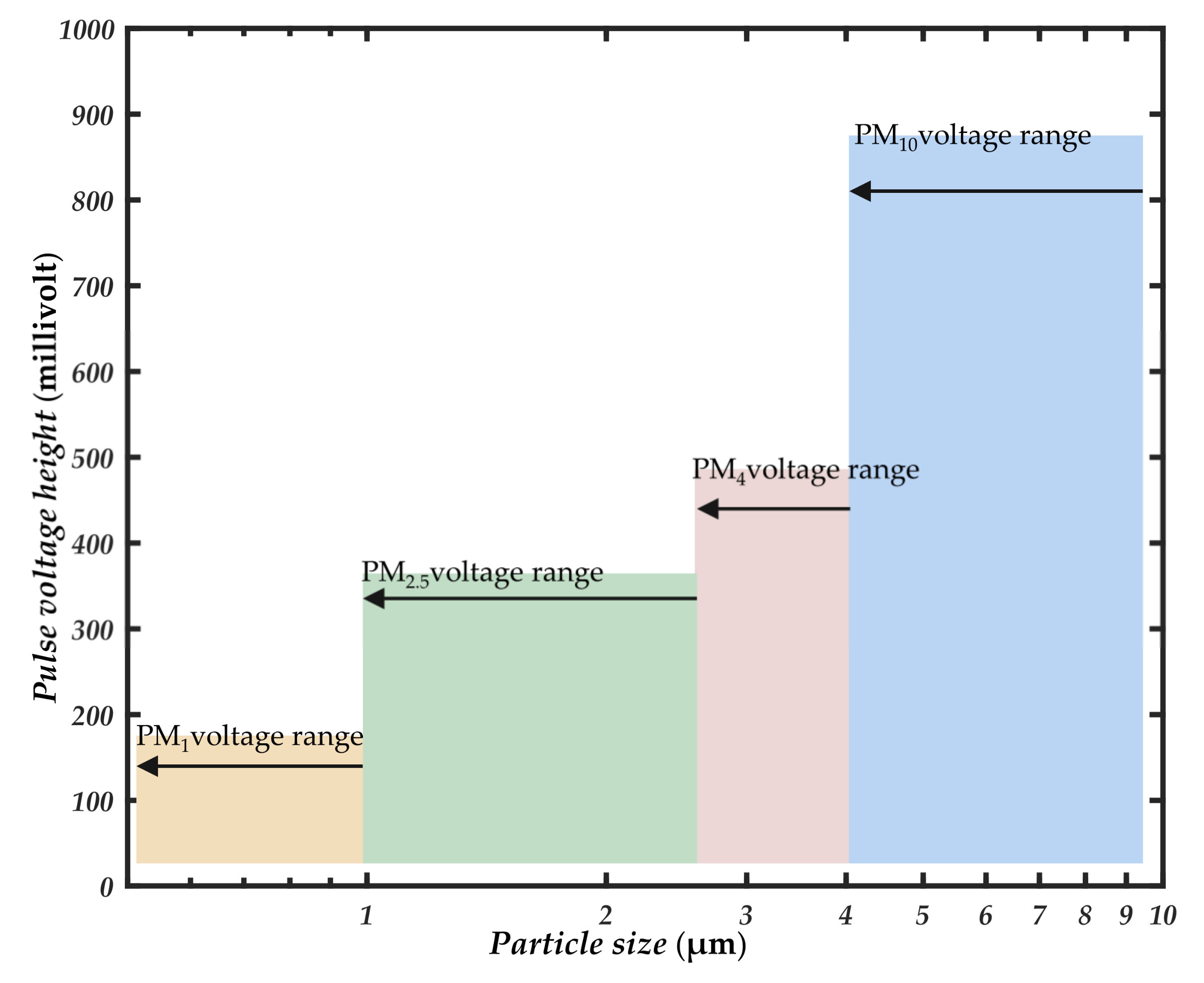
3.3. Pulse Channel Division and Particle Size Segmentation
3.4. Calibration of Characteristic Parameters
4. Performance Test
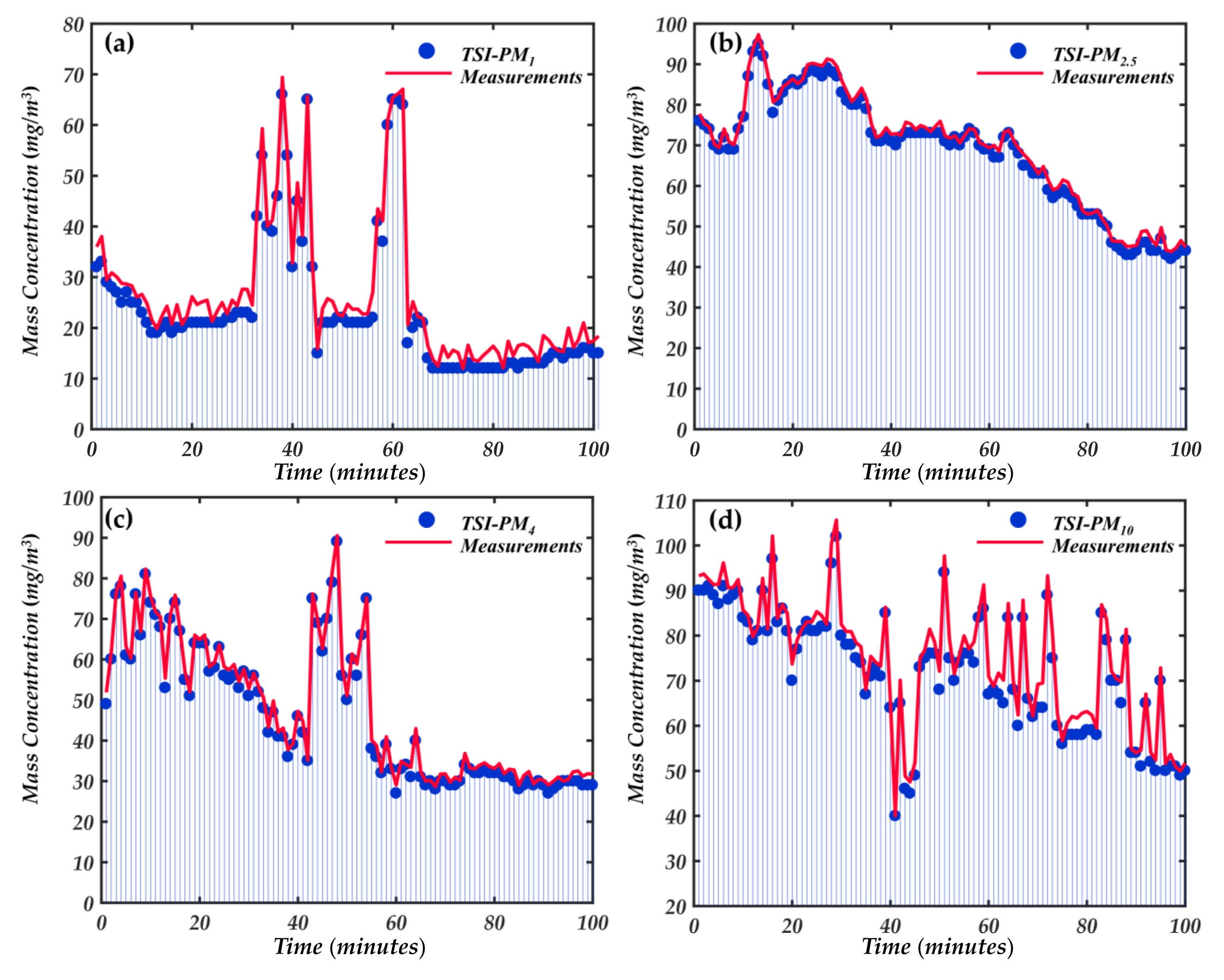
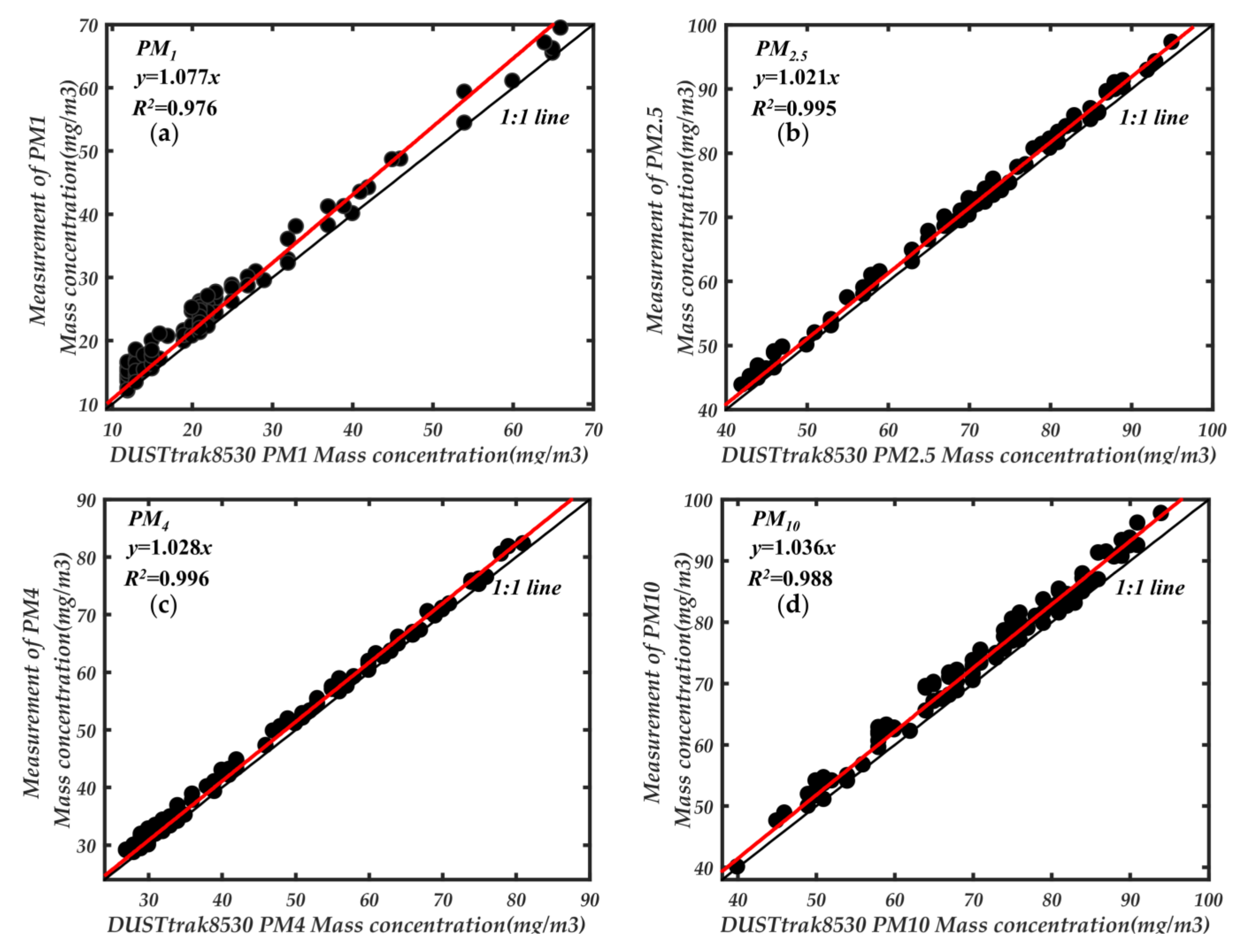
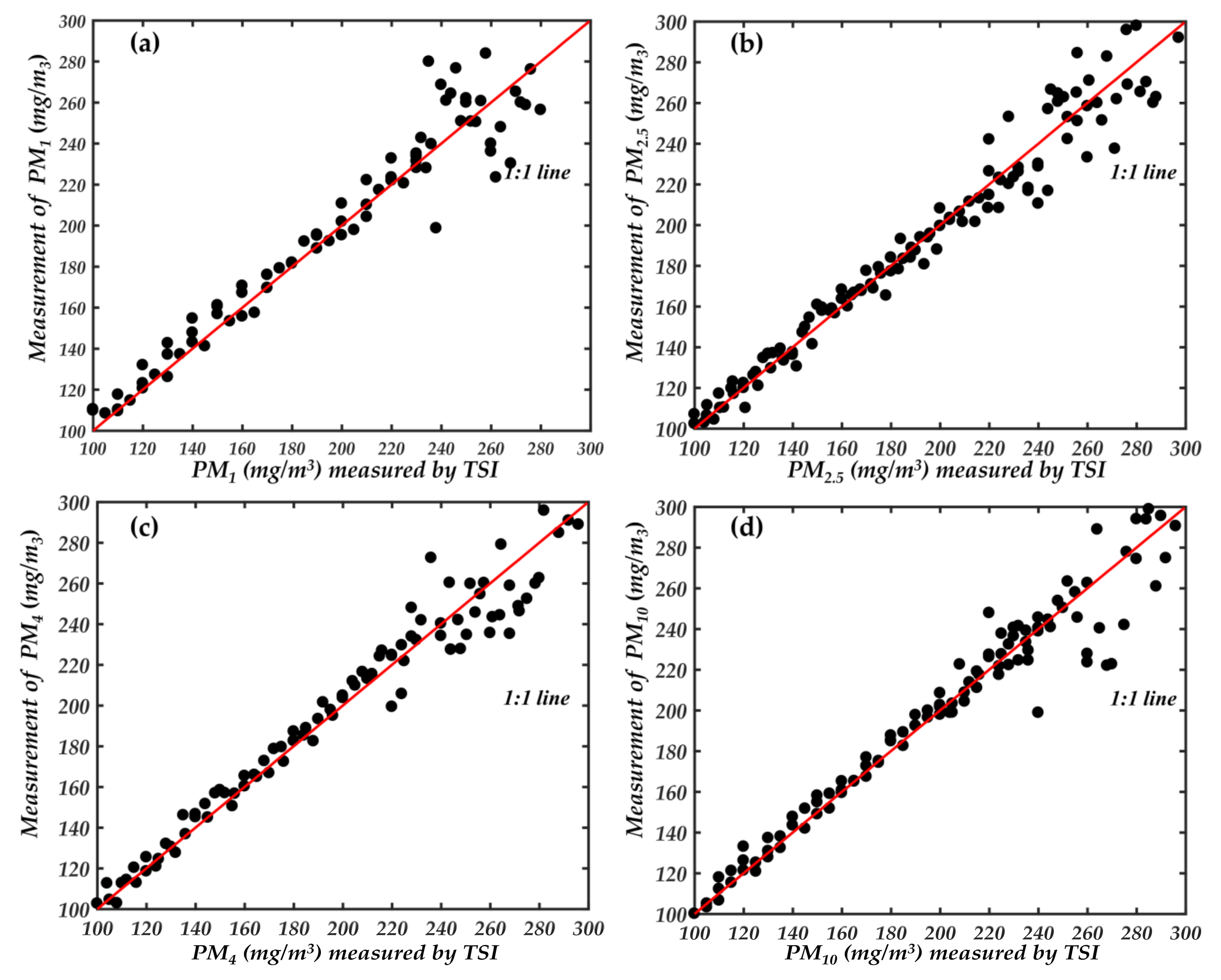
4.1. Comparison with DustTrack 8530 through the Simulated Smoke Box
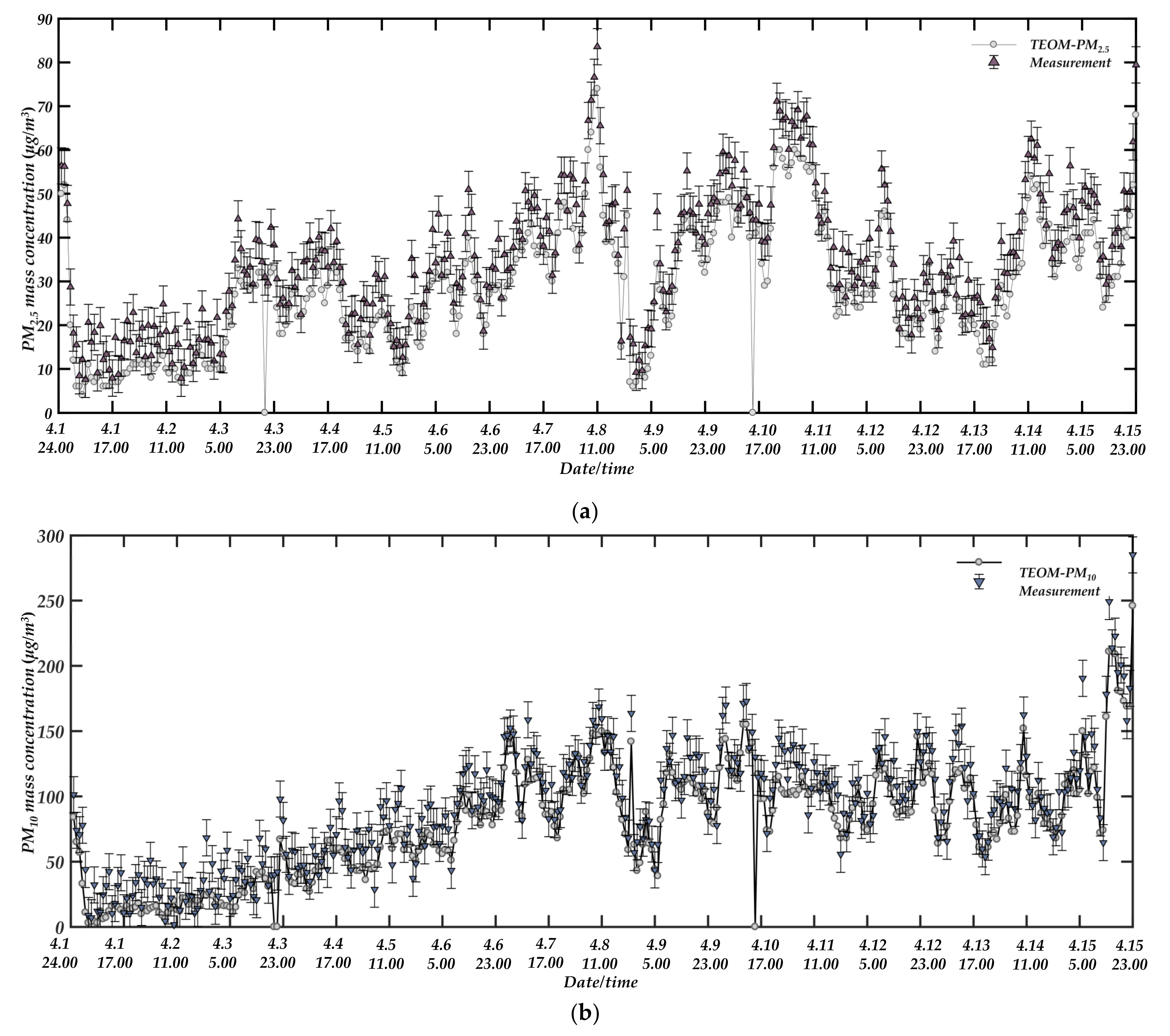
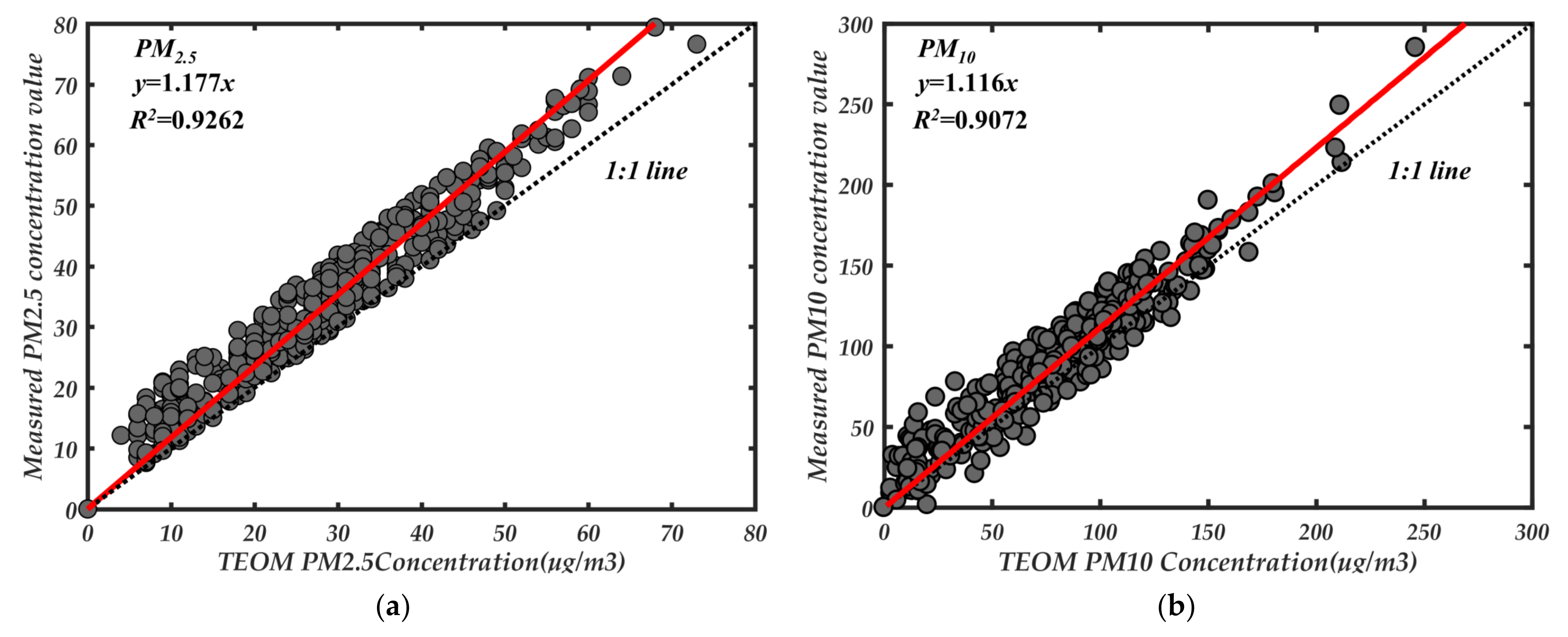
4.2. Comparison with TEOM Instruments under Real Atmospheric Environment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, C.; Tseng, Y.; Mukundan, A.; Wang, H. Air Pollution: Sensitive Detection of PM2.5 and PM10 Concentration Using Hyperspectral Imaging. Appl. Sci. 2021, 11, 4543. [Google Scholar] [CrossRef]
- Brattich, E.; Bracci, A.; Zappi, A.; Morozzi, P.; Di Sabatino, S.; Porcu, F.; Di Nicola, F.; Tositti, L. How to Get the Best from Low-Cost Particulate Matter Sensors: Guidelines and Practical Recommendations. Sensors 2020, 20, 3073. [Google Scholar] [CrossRef]
- Xavier, Q.; Andrés, A.; Sergio, R.; Felicià, P.; Enrique, M.; Carmen, R. Monitoring of PM10 and PM2.5 around primary particulate anthropogenic emission sources. Atmos. Environ. 2001, 35, 845–858. [Google Scholar] [CrossRef]
- Chuchro, M.; Sarlej, W.; Grzegorczyk, M.; Nurzyńska, K. Application of Photo Texture Analysis and Weather Data in Assessment of Air Quality in Terms of Airborne PM10 and PM2.5 Particulate Matter. Sensors 2021, 21, 5483. [Google Scholar] [CrossRef] [PubMed]
- Yu, R.; Park, S.; Choi, K.; Hong, E.; Kim, H. Air Pollution and Atopic Dermatitis (AD): The Impact of Particulate Matter (PM10) on an AD Mouse-Model. Int. J. Mol. Sci. 2020, 21, 6079. [Google Scholar] [CrossRef]
- Guo, M.; Xing, R.; Shimada, Y.; Kurata, G. Individual exposure to particulate matter in urban and rural Chinese households: Estimation of exposure concentrations in indoor and outdoor environments. Nat. Hazards 2019, 99, 1397–1414. [Google Scholar] [CrossRef]
- Buonanno, G.; Stabile, L.; Morawska, L. Estimation of airborne viral emission: Quanta emission rate of SARS-CoV-2 for infection risk assessment. Environ. Int. 2020, 141, 105794. [Google Scholar] [CrossRef]
- Mirhoseini, S.H.; Nikaeen, M.; Khanahmd, H.; Hatamzadeh, M.; Hassanzadeh, A. Monitoring of airborne bacteria and aerosols in different wards of hospitals—Particle counting usefulness in investigation of airborne bacteria. Ann. Agric. Environ. Med. 2015, 22, 670–673. [Google Scholar] [CrossRef]
- Travaglio, M.; Yu, Y.; Popovic, R.; Selley, L.; Leal, N.S.; Martins, L.M. Links between air pollution and COVID-19 in England. Environ. Pollut. 2021, 268, 115859. [Google Scholar] [CrossRef] [PubMed]
- Lopez-Feldman, A.; Heres, D.; Marquez-Padilla, F. Air pollution exposure and COVID-19: A look at mortality in Mexico City using individual-level data. Sci. Total Environ. 2021, 756, 143929. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Y.; Xie, J.; Huang, F.; Cao, L. Association between short-term exposure to air pollution and COVID-19 infection: Evidence from China. Sci. Total Environ. 2020, 727, 138704. [Google Scholar] [CrossRef] [PubMed]
- List of Designated Reference and Equivalentmethod. Available online: https://www.epa.gov/technical-air-pollution-resources (accessed on 9 January 2021).
- Patashnick, H.; Rupprecht, E.G. Continuous PM-10 Measurements Using the Tapered Element Oscillating Microbalance. J. Air Waste Manag. Assoc. 2012, 41, 1079–1083. [Google Scholar] [CrossRef]
- Husar, R.B. Atmospheric particulate mass monitoring with a β radiation detector. Atmos. Environ. 1975, 8, 183–188. [Google Scholar] [CrossRef]
- Gmiterko, A.; Slosarcik, S.; Dovic, M. Algorithm of nonrespirable dust fraction suppression using an optical transducer of dust mass concentration. IEEE Trans. Instrum. Meas. 2004, 47, 1228–1233. [Google Scholar] [CrossRef]
- Shao, W.; Zhang, H.; Zhou, H. Fine Particle Sensor Based on Multi-Angle Light Scattering and Data Fusion. Sensors 2017, 17, 1033. [Google Scholar] [CrossRef] [Green Version]
- Thomas, A.; Gebhart, J. Correlations between gravimetry and light scattering photometry for atmospheric aerosols. Atmos. Environ. 1994, 28, 935–938. [Google Scholar] [CrossRef]
- Görner, P.; Bemer, D.; Fabriés, J.F. Photometer measurement of polydisperse aerosols. J. Aerosol Sci. 1995, 26, 1281–1302. [Google Scholar] [CrossRef]
- Holve, D.J.; Tichenor, D.; Wang, J.; Hardesty, D.R. Design criteria and recent developments of optical single particle counters for fossil fuel systems. Opt. Eng. 1981, 20, 529–539. [Google Scholar] [CrossRef]
- Hirleman, E.D. Laser-based single particle counters for in situparticulate diagnostics. Opt. Eng. 1980, 19, 854–860. [Google Scholar] [CrossRef]
- Gu, F.; Yang, J.; Wang, C.; Bian, B.; He, A. Mass concentration calculation with the pulse height distribution of aerosols and system calibration. Optik 2010, 121, 1–10. [Google Scholar] [CrossRef]
- Hulst, V.D. Light scattering by small particles. Phys. Today 1957, 10, 28. [Google Scholar] [CrossRef]
- Han, X.; Shen, J.; Yin, P.; Hu, S.; Bi, D. Influences of refractive index on forward light scattering. Opt. Commun. 2014, 316, 198–205. [Google Scholar] [CrossRef]
- Chen, D.; Liu, X.; Han, J.; Jiang, M.; Xu, Y.; Xu, M. Measurements of particulate matter concentration by the light scattering method: Optimization of the detection angle. Fuel Process. Technol. 2018, 179, 124–134. [Google Scholar] [CrossRef]
- GöRner, P.; Bemer, D.; Fabriès, J. Theoretical and methodological approach of photometer calibration. J. Aerosol Sci. 1990, 21, S517–S520. [Google Scholar] [CrossRef]
- Zuidema, C.; Stebounova, L.; Sousan, S.; Thomas, G.; Koehler, K.; Peters, T. Sources of error and variability in particulate matter sensor network measurements. J. Occup. Environ. Hyg. 2019, 16, 564–574. [Google Scholar] [CrossRef]
- Da, M.; Mikusova, L.; Hnilica, R.; Ockajova, A. Calibration of photometer-based direct-reading aerosol monitors. MM Sci. J. 2017, 2017, 2069–2072. [Google Scholar] [CrossRef]
- Görner, P.; Simon, X.; Bémer, D.; Lidén, G. Workplace aerosol mass concentration measurement using optical particle counters. J. Environ. Monit. JEM 2012, 14, 420–428. [Google Scholar] [CrossRef] [PubMed]
- Sousan, S.; Regmi, S.; Park, Y.M. Laboratory Evaluation of Low-Cost Optical Particle Counters for Environmental and Occupational Exposures. Sensors 2021, 21, 4146. [Google Scholar] [CrossRef] [PubMed]
- Eidhammer, T.; Montague, D.C.; Deshler, T. Determination of index of refraction and size of supermicrometer particles from light scattering measurements at two angles. J. Geophys. Res. Atmos. 2008, 113, 280–288. [Google Scholar] [CrossRef] [Green Version]
- Worms, J.C.; Renard, J.B.; Hadamcik, E.; Levasseur-Regourd, A.C.; Gayet, J.F. Results of the PROGRA 2 Experiment: An Experimental Study in Microgravity of Scattered Polarized Light by Dust Particles with Large Size Parameter. Icarus 1999, 142, 281–297. [Google Scholar] [CrossRef]
- Gupta, R.P.; Wall, T.F. The complex refractive index of particles. J. Phys. D Appl. Phys. 2000, 14, L95–L98. [Google Scholar] [CrossRef]
- Petzold, A.; Döpelheuer, A.; Brock, C.A.; Schröder, F. In situ observations and model calculations of black carbon emission by aircraft at cruise altitude. J. Geophys. Res. Atmos. 1999, 104, 22171. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.S.; Krishnan, S.S.; Faeth, G.M. Refractive Indices at Visible Wavelengths of Soot Emitted From Buoyant Turbulent Diffusion Flames. J. Heat Transfer. 1997, 119, 230–237. [Google Scholar] [CrossRef]
- Chen, D.; Liu, X.; Han, J.; Jiang, M.; Qi, J. A New Angular Light Scattering Measurement of Particulate Matter Mass Concentration for Homogeneous Spherical Particles. Sensors 2019, 19, 2243. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mie, G. Pioneering mathematical description of scattering by spheres. Ann. Phys. 1908, 25, 337. [Google Scholar]
- Murley, R.D. Mie theory of light scattering—Limitations on accuracy of approximate methods of computation. J. Phys. Chem. 1960, 64, 161–162. [Google Scholar] [CrossRef]
- Hodkinson, J.R. Particle Sizing by Means of the Forward Scattering Lobe. Appl. Opt. 1966, 5, 839. [Google Scholar] [CrossRef]
- Cooke, D.D.; Kerker, M. Response Calculations for Light-Scattering Aerosol Particle Counters. Appl. Opt. 1975, 14, 734–739. [Google Scholar] [CrossRef]
- Leung, S.H.; So, C.F. Gradient-Based Variable Forgetting Factor RLS Algorithm in Time-Varying Environments. IEEE Trans. Signal Process. 2005, 53, 3141–3150. [Google Scholar] [CrossRef]
- Zhang, R.; Zhao, H. A Novel Method for Online Extraction of Small-Angle Scattering Pulse Signals from Particles Based on Variable Forgetting Factor RLS Algorithm. Sensors 2021, 21, 5759. [Google Scholar] [CrossRef]
- Coleman, T.F.; Li, Y. An Interior Trust Region Approach for Nonlinear Minimization Subject to Bounds. SIAM J. Optim. 1993, 6, 418–445. [Google Scholar] [CrossRef] [Green Version]
- Lourakis, M.; Argyros, A.A. Is Levenberg-Marquardt the Most Efficient Optimization Algorithm for Implementing Bundle Adjustment? In Proceedings of the 10th IEEE International Conference on Computer Vision (ICCV 2005), Beijing, China, 17–20 October 2005; pp. 1526–1531. [Google Scholar]
- Bakushinskii, A.B. The problem of the convergence of the iteratively regularized Gauss-Newton method. Comput. Math. Math. Phys. 1992, 32, 1353–1359. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aerosol | K(1–2.5)0 | K(2.5–4)0 | K(4–10)0 | KPSC0 | Lower | Upper |
|---|---|---|---|---|---|---|
| Sand | 4.73 × 10−3 | 6.12 × 10−4 | 2.13 × 10−4 | 2.29 × 10−3 | 0 | inf |
| Salt | 4.81 × 10−3 | 8.11 × 10−4 | 2.51 × 10−4 | 6.54 × 10−3 | 0 | inf |
| Lime | 5.85 × 10−3 | 6.65 × 10−4 | 3.37 × 10−4 | 5.23 × 10−3 | 0 | inf |
| Soot | 6.42 × 10−3 | 8.05 × 10−4 | 5.78 × 10−4 | 13.72 × 10−3 | 0 | inf |
| Glycerol | 4.10 × 10−3 | 7.65 × 10−4 | 2.28 × 10−4 | 5.74 × 10−3 | 0 | inf |
| DHES | 5.28 × 10−3 | 7.44 × 10−4 | 3.77 × 10−4 | 5.99 × 10−3 | 0 | inf |
| Glass | 4.45 × 10−3 | 6.02 × 10−4 | 3.67 × 10−4 | 2.87 × 10−3 | 0 | inf |
| Aerosol | Methods | K1–2.5 | K2.5–4 | K4–10 | KPSC |
|---|---|---|---|---|---|
| sand | Trust-region | 5.92 × 10−3 | 3.11 × 10−3 | 6.61 × 10−4 | 7.71 × 10−3 |
| sand | Levenberg-Marquardt | 5.92 × 10−3 | 3.11 × 10−3 | 6.61 × 10−4 | 7.71 × 10−3 |
| salt | Trust-region | 6.77 × 10−3 | 4.65 × 10−3 | 6.05 × 10−4 | 3.12 × 10−3 |
| salt | Levenberg-Marquardt | 6.77 × 10−3 | 4.65 × 10−3 | 6.05 × 10−4 | 3.12 × 10−3 |
| Lime | Trust-region | 6.51 × 10−3 | 3.64 × 10−3 | 6.59 × 10−4 | 5.94 × 10−3 |
| Lime | Levenberg-Marquardt | 6.51 × 10−3 | 3.64 × 10−3 | 6.59 × 10−4 | 5.94 × 10−3 |
| Soot | Trust-region | 7.58 × 10−3 | 5.32 × 10−3 | 7.87 × 10−4 | 9.24 × 10−3 |
| Soot | Levenberg-Marquardt | 7.58 × 10−3 | 5.32 × 10−3 | 7.87 × 10−4 | 9.24 × 10−3 |
| Glycerol | Trust-region | 5.35 × 10−3 | 3.92 × 10−3 | 5.61 × 10−4 | 4.64 × 10−3 |
| Glycerol | Levenberg-Marquardt | 5.35 × 10−3 | 3.92 × 10−3 | 5.61 × 10−4 | 4.64 × 10−3 |
| DEHS | Trust-region | 5.29 × 10−3 | 4.71 × 10−3 | 5.42 × 10−4 | 2.13 × 10−3 |
| DEHS | Levenberg-Marquardt | 5.29 × 10−3 | 4.71 × 10−3 | 5.42 × 10−4 | 2.13 × 10−3 |
| Glass | Trust-region | 4.23 × 10−3 | 3.24 × 10−3 | 6.13 × 10−4 | 3.08 × 10−3 |
| Glass | Levenberg-Marquardt | 4.23 × 10−3 | 3.24 × 10−3 | 6.13 × 10−4 | 3.08 × 10−3 |
| Parameters | K1–2.5 | K2.5–4 | K4–10 | KPSC |
|---|---|---|---|---|
| value | 5.95 × 10−3 | 4.08 × 10−3 | 6.32 × 10−4 | 5.122 × 10−3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, R.; Zhao, H. Small-Angle Particle Counting Coupled Photometry for Real-Time Detection of Respirable Particle Size Segmentation Mass Concentration. Sensors 2021, 21, 5977. https://doi.org/10.3390/s21175977
Zhang R, Zhao H. Small-Angle Particle Counting Coupled Photometry for Real-Time Detection of Respirable Particle Size Segmentation Mass Concentration. Sensors. 2021; 21(17):5977. https://doi.org/10.3390/s21175977
Chicago/Turabian StyleZhang, Rongrui, and Heng Zhao. 2021. "Small-Angle Particle Counting Coupled Photometry for Real-Time Detection of Respirable Particle Size Segmentation Mass Concentration" Sensors 21, no. 17: 5977. https://doi.org/10.3390/s21175977
APA StyleZhang, R., & Zhao, H. (2021). Small-Angle Particle Counting Coupled Photometry for Real-Time Detection of Respirable Particle Size Segmentation Mass Concentration. Sensors, 21(17), 5977. https://doi.org/10.3390/s21175977