
Low Velocity Impact Localization of Variable Thickness Composite Laminates

Abstract
:1. Introduction
2. Impact Localization Algorithm Based on an FBG Sensing Network
2.1. FBG Strain Sensing Principle
2.2. FBG Sensor Impact Signal Analysis Method
2.2.1. Empirical Mode Decomposition
2.2.2. Decomposition Procedure
- Decompose the original signals using EMD, obtain the correlation coefficient of each IMF and the original signal according to the following formula. The solution process is as follows: if there are two sets of data with the same number, they are recorded as , , is a row vector, is a column vector, and the correlation coefficient is:
- Select the IMF with larger q for analysis, and extract the impact signal feature of composite laminates.
2.3. Impact Localization Algorithm of Variable Thickness Composite Laminate
2.3.1. Zero-Mean Normalized Cross-Correlation Algorithm
2.3.2. Impact Location Algorithm Procedure
- Collect data at C impact locations, and the impact signal vectors collected by Q sensors at each location form a signal matrix (where i = 1, 2, 3, ⋯, C) as impact sample signal. The signal vector is decomposed by EMD, then calculate the correlation coefficient q between the component and the original signal . Select the component with a larger q as the feature component and get the signal feature matrix (where i = 1, 2, 3, ⋯, C) in the same way.
- The impact sample feature vector obtained after mean removal is (where , i = 1, 2, 3,⋯, C, j = 1, 2, 3, ⋯, Q), whose zero-mean normalization vector consists of the following normalization constants:
- Perform spectrum analysis on the EMD component of the signal vector in 1) to obtain the number of the peaks, where the peak definition threshold is , and a is the number of component vectors. Similarly, the peak number set (where i = 1, 2, 3, ⋯, C) of the signal matrix can be obtained. After normalizing , the set of integrated thickness coefficients (where i = 1, 2, 3, ⋯, C) of is obtained. Using to correct , we can obtain sample impact feature vector of the VTCL, where . The zero-mean normalization vector of the VTCL consists of the following normalization constants:
- In the same way, the acquired impact signal to be located is decomposed by EMD and the zero-mean normalized feature vector is obtained, and the zero-mean normalization constant is:
- Carry out the ZNCC operation between the feature vectors of sample impact signal and the to-be-located impact signal. The VTCL comprehensive cross-correlation value between x and the impact sample signal is calculated as:
- Compare numerical values of , ⋯, and take the points , , , with the first four largest values to determine impact localization reference area. Define the point where the cross-correlation value of the , connection interpolation is 1 as , the point where the cross-correlation value of the , connection interpolation is 1 as , the point where the cross-correlation value of the , connection interpolation is 1 as , take , , as the boundary points of the impact localization reference area. Calculate the centroid of the reference area as the identified impact location.
3. Impact Experiment and Result Analysis
3.1. Impact Experimental System of the Variable Thickness Composite Laminate
3.2. Establishment of Impact Sample Signal Database and Impact Signal Analysis
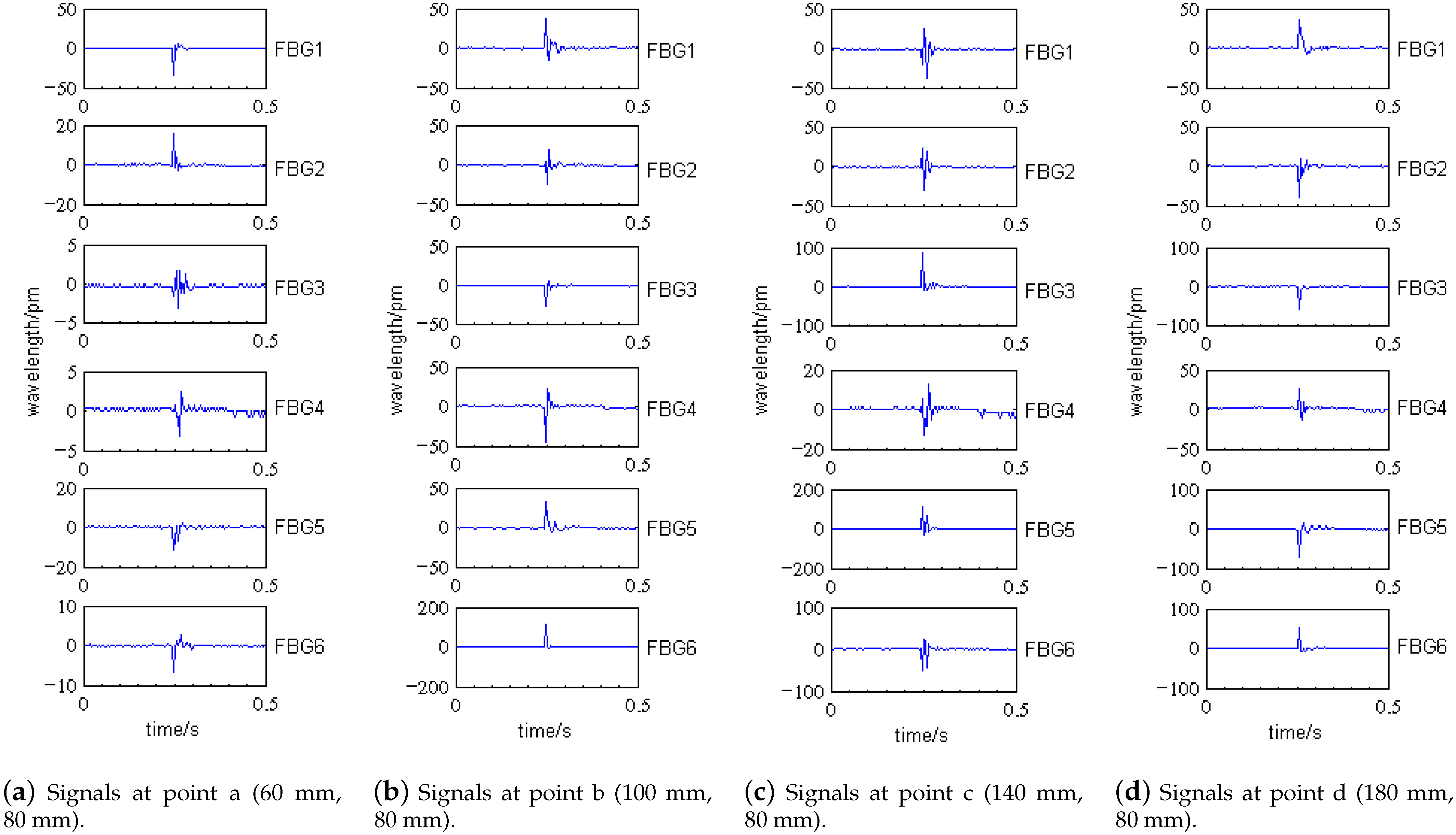
- When impact points are at the same distance from the sensor and the thickness of the composite laminate at the impact positions are the same, the influence of impact position on signal cannot be judged by time-domain analysis. For example, the distances from the sensor No. 2 to the impact point b and c are equal, the composite laminate thickness at point b and c is basically the same, then the amplitude (FBG center wavelength shift of sensor No. 2) difference of impact signals at point b and c is relatively small.
- When impact points are at the same distance from the sensor, but the thicknesses of the composite laminate at the impact positions are different, the time-domain analysis can be used to judge the influence of impact positions. The smaller the thickness, the greater the signal amplitude. For example, the distances from the sensor No. 2 to the impact point a and d are equal, but the composite laminate thickness at two points varies greatly; then, the amplitude of impact signals at two points differs greatly.
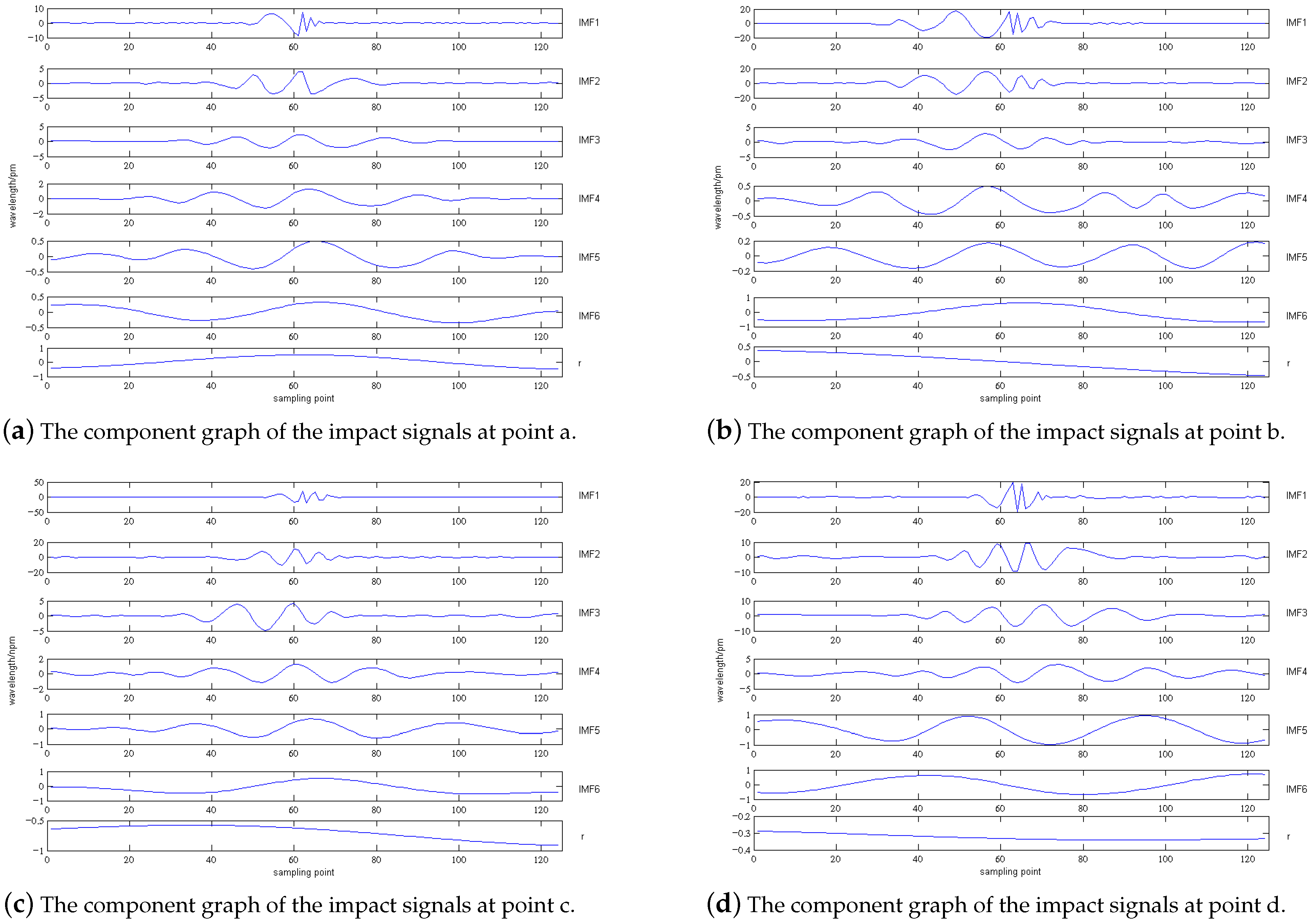
- The frequency band range of the EMD components gradually decrease to the low frequency direction from the first-order to the third-order. The second-order EMD component seldom detects impact signals above 40 Hz because its frequency band decreases to less than 40 Hz, and the third-order component can no longer detect the impact signal above 20 Hz because its frequency band is reduced to within 20 Hz;
- The 20 Hz and 40 Hz spectral amplitudes of the first-order EMD component are lower than the second-order EMD component, and the 20 Hz spectral amplitude of the second-order EMD component is lower than the third-order;
- With the change of impact position, the amplitude of resonance frequency of each EMD component changes.
- The spectrum amplitude of the third order component at each impact point is closely related to the distance between sensor and the impact point, and the laminate thickness at the sensor’s location.
- The frequency band range of the third order component at each impact point is related to the positions of sensor and impact point.
3.3. Impact Localization Analysis
- If the difference between the impact occurrence time of the two sample signals is greater than about 0.2 s, according to the conclusion obtained from Figure 9 (“the vibration duration of the signal is no more than 0.1 s”), it can be inferred that their time domain signals do not overlap, that is, the two signals do not affect each other. Then, we can use the proposed method to analyze and locate the two signals respectively.
- If two signals affect each other, this method is invalid unless each single signal can be extracted without loss.
- If the number of impact signals exceeds two, the proposed localization method can also be used for analysis in the same way.
4. Conclusions
- We proposed a method for monitoring the LVI location of VTCL by the FBG sensing network. The results show that the FBG sensor can be used to study the impact of VTCL.
- Based on the strain characteristics of FBG and the impact signal characteristics of composite structures, an impact localization method based on EMD, ZNCC, and thickness correction for VTCL is proposed. This method does not need prior knowledge, and can effectively eliminate cross-interference of temperature on the sensor center wavelength, and is robust to impact energy. The EMD method can more accurately extract the impact signal feature of VTCL. High frequency signal and low frequency signal can be distinguished by EMD decomposition, which provides a good basis for the impact study of VTCL. By using ZNCC and thickness correction, the localization can be achieved by comparing the impact feature. In addition, the complete impact localization procedures of the VTCL are given.
- Based on the impact localization method of the variable thickness structures, an impact localization system for the VTCL is built. The system addresses impact monitoring of complex composite structures and is less susceptible to environmental disturbances. The performance of the proposed impact localization method is verified by experiments, which show that the method can accurately evaluate the impact location under the same conditions. The maximum positioning error is 24.41 mm and the average positioning error is 15.67 mm, which can meet the engineering application requirements of LVI load location discrimination. The variable-thickness normalization procedure (especially when the impact amplitude is smaller) significantly improves the localization performance, with a significant reduction in localization error from 29.47 mm to 15.67 mm.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Alvarez-Montoya, J.; Carvajal-Castrillon, A.; Sierra-Perez, J. In-flight and wireless damage detection in a UAV composite wing using fiber optic sensors and strain field pattern recognition. Mech. Syst. Signal Process. 2020, 136, 106526. [Google Scholar] [CrossRef]
- Goossens, S.; De Pauw, B.; Geernaert, T. Aerospace-grade surface mounted optical fibre strain sensor for structural health monitoring on composite structures evaluated against in-flight conditions. Smart Mater. Struct. 2019, 28, 065008. [Google Scholar] [CrossRef]
- Weiland, J.; Hesser, D.; Xiong, W. Structural health monitoring of an adhesively bonded CFRP aircraft fuselage by ultrasonic Lamb Waves. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2020, 234, 2000–2010. [Google Scholar] [CrossRef]
- Kefal, A.; Tabrizi, I.; Yildiz, M. A smoothed iFEM approach for efficient shape-sensing applications: Numerical and experimental validation on composite structures. Mech. Syst. Signal Process. 2021, 152, 107486. [Google Scholar] [CrossRef]
- Zheng, Z.; Lu, Y.; Liang, D. Low-Velocity Impact Localization on a Honeycomb Sandwich Panel Using a Balanced Projective Dictionary Pair Learning Classifier. Sensors 2021, 21, 2602. [Google Scholar] [CrossRef]
- Vorathin, E.; Hafizi, Z.; Ghani, S. Real-time monitoring system of composite aircraft wings utilizing Fibre Bragg Grating sensor. Aerotech Vi-Innov. Aerosp. Eng. Technol. 2016, 152, 012024. [Google Scholar] [CrossRef]
- Gao, D.; Wu, Z.; Yang, L. Integrated impedance and Lamb wave-based structural health monitoring strategy for long-term cycle-loaded composite structure. Struct. Health-Monit. Int. J. 2018, 17, 763–776. [Google Scholar] [CrossRef]
- Lugovtsova, Y.; Bulling, J.; Boller, C. Analysis of Guided Wave Propagation in a Multi-Layered Structure in View of Structural Health Monitoring. Appl. Sci. 2019, 9, 4600. [Google Scholar] [CrossRef] [Green Version]
- Her, S.; Chung, S. Dynamic Responses Measured by Optical Fiber Sensor for Structural Health Monitoring. Appl. Sci. 2019, 9, 2956. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Zhong, Y.; Xiang, J. TAM and MUSIC Approach for Impact-Source Localization under Deformation Conditions. Sensors 2020, 20, 3151. [Google Scholar] [CrossRef]
- Marino-Merlo, E.; Bulletti, A.; Giannelli, P. Analysis of Errors in the Estimation of Impact Positions in Plate-Like Structure through the Triangulation Formula by Piezoelectric Sensors Monitoring. Sensors 2018, 18, 3426. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Datta, A.; Augustin, M.; Gupta, N. Impact Localization and Severity Estimation on Composite Structure Using Fiber Bragg Grating Sensors by Least Square Support Vector Regression. IEEE Sens. J. 2019, 19, 4463–4470. [Google Scholar] [CrossRef]
- Jeong, H.; Cho, S. Impact source location of composites using a single sensor and time reversal technique. In Proceedings of the AIP Conference Proceedings, Denver, CO, USA, 8–13 October 2013; Volume 1511, pp. 246–253. [Google Scholar]
- Park, B.; Sohn, H.; Olson, S. Impact localization in complex structures using laser-based time reversal. Struct. Health Monit. 2012, 11, 577–588. [Google Scholar] [CrossRef]
- Ciampa, F.; Meo, M. Impact localization on a composite tail rotor blade using an inverse filtering approach. J. Int. Mat. Syst. Str 2014, 25, 1950–1958. [Google Scholar] [CrossRef] [Green Version]
- Waters, D.; Hoffman, J.; Kumosa, M. Monitoring of Overhead Transmission Conductors Subjected to Static and Impact Loads Using Fiber Bragg Grating Sensors. IEEE Trans. Instrum. Meas. 2019, 68, 595–605. [Google Scholar] [CrossRef]
- Zhao, G.; Li, S.; Hu, H. Impact localization on composite laminates using fiber Bragg grating sensors and a novel technique based on strain amplitude. Opt. Fiber Technol. 2018, 40, 172–179. [Google Scholar] [CrossRef]
- Lu, S.; Jiang, M.; Wang, X. Damage detection method of CFRP structure based on fiber Bragg grating and principal component analysis. Optik 2019, 178, 858–867. [Google Scholar] [CrossRef]
- Gutierrez, N.; Fernandez, R.; Galvin, P. Fiber Bragg grating application to study an unmanned aerial system composite wing. J. Intell. Mater. Syst. Struct. 2019, 30, 1252–1262. [Google Scholar] [CrossRef]
- Jang, B.; Lee, Y.; Kim, J. Real-time impact identification algorithm for composite structures using fiber Bragg grating sensors. Struct. Control Health Monit. 2012, 19, 580–591. [Google Scholar] [CrossRef]
- Jang, B.; Lee, Y.; Kim, C. Impact source localization for composite structures under external dynamic loading condition. Adv. Compos. Mater 2015, 24, 359–374. [Google Scholar] [CrossRef]
- Hiche, C.; Coelho, C.; Chattopadhyay, A. A strain amplitude-based algorithm for impact location on composite laminates. J. Int. Mat. Syst. Str 2011, 22, 2061–2067. [Google Scholar] [CrossRef]
- Webb, S.; Oman, K.; Peters, K. Localized measurements of composite dynamic response for health monitoring. In Proceedings of the Smart Sensor Phenomena, Technology, Networks, and Systems Integration 2014, San Diego, CA, USA, 10–11 March 2014; Volume 9062, p. 906206. [Google Scholar]
- Kim, Y.; Kim, J.; Park, Y. Low-speed Impact Localization on a Stiffened Composite Structure Using Reference Data Method. Compos. Res. 2016, 29, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.; Jang, H. Impact localization on a composite plate based on error outliers with Pugh’s concept selection. Compos. Struct. 2018, 200, 449–465. [Google Scholar] [CrossRef]
- Jang, B.; Kim, C. Impact localization of composite stiffened panel with triangulation method using normalized magnitudes of fiber optic sensor signals. Compos. Struct. 2019, 211, 522–529. [Google Scholar] [CrossRef]
- Yu, J.; Liang, D. Impact localization system of composite structure based on recurrence quantification analysis by using FBG sensors. Opt. Fiber Technol. 2019, 49, 7–15. [Google Scholar] [CrossRef]
- Mulle, M.; Yudhanto, A.; Lubineau, G. Internal strain assessment using FBGs in a thermoplastic composite subjected to quasi-static indentation and low-velocity impact. Compos. Struct. 2019, 215, 305–316. [Google Scholar] [CrossRef]
- Xu, C.; Chai, Y.; Li, H. A Feature Extraction Method for the Wear of Milling Tools Based on the Hilbert Marginal Spectrum. Mach. Sci. Technol. 2019, 23, 847–868. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Center Wavelength/nm | Location/mm |
|---|---|---|
| FBG1 | 1529.939 | (40, 20) |
| FBG2 | 1527.045 | (120, 20) |
| FBG3 | 1535.118 | (200, 20) |
| FBG4 | 1530.090 | (40, 180) |
| FBG5 | 1555.793 | (120, 180) |
| FBG6 | 1535.064 | (200, 180) |
| IMF1 | IMF2 | IMF3 | IMF4 | IMF5 | IMF6 | r |
|---|---|---|---|---|---|---|
| 0.3283 | 0.2387 | 0.1802 | 0.0718 | 0.0661 | 0.0567 | 0.0226 |
| 0.3267 | 0.2442 | 0.1797 | 0.0823 | 0.0698 | 0.0606 | 0.0297 |
| 0.3181 | 0.2378 | 0.1846 | 0.0884 | 0.0763 | 0.0673 | 0.0289 |
| 0.3085 | 0.2281 | 0.1749 | 0.0786 | 0.0664 | 0.0574 | 0.0261 |
| Impact Point (mm) | Normal Cross-Correlation Localization Results (mm) | Normal Cross-Correlation Localization Error (mm) | Variable-Thickness Normalized Cross-Correlation Localization Results (mm) | Variable-Thickness Normalized Cross-Correlation Localization Error (mm) |
|---|---|---|---|---|
| 1 (20, 40) | (62, 23) | 45.31 | (34, 20) | 24.41 |
| 2 (30, 90) | (69, 99) | 40.03 | (32, 111) | 21.10 |
| 3 (80, 30) | (112, 47) | 36.24 | (85, 48) | 18.68 |
| 4 (100, 80) | (120, 109) | 35.23 | (98, 99) | 19.11 |
| 5 (60, 130) | (34, 143) | 29.07 | (43, 131) | 17.03 |
| 6 (140, 40) | (130, 63) | 25.08 | (152, 49) | 15 |
| 7 (120, 150) | (96, 152) | 24.08 | (107, 148) | 13.15 |
| 8 (180, 120) | (160, 122) | 20.10 | (183, 129) | 9.49 |
| 9 (220, 80) | (211, 62) | 20.12 | (213, 88) | 10.63 |
| 10 (190, 170) | (206, 181) | 19.42 | (198, 169) | 8.06 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, G.; Zhou, Y.; Xu, Y. Low Velocity Impact Localization of Variable Thickness Composite Laminates. Sensors 2021, 21, 6103. https://doi.org/10.3390/s21186103
Lu G, Zhou Y, Xu Y. Low Velocity Impact Localization of Variable Thickness Composite Laminates. Sensors. 2021; 21(18):6103. https://doi.org/10.3390/s21186103
Chicago/Turabian StyleLu, Guan, Yuchen Zhou, and Yiming Xu. 2021. "Low Velocity Impact Localization of Variable Thickness Composite Laminates" Sensors 21, no. 18: 6103. https://doi.org/10.3390/s21186103
APA StyleLu, G., Zhou, Y., & Xu, Y. (2021). Low Velocity Impact Localization of Variable Thickness Composite Laminates. Sensors, 21(18), 6103. https://doi.org/10.3390/s21186103